本発明の一実施形態について、図1〜図9を参照して説明する。
図1に示すように、本実施形態に係るコンベヤスケール10は、ベルトコンベヤ12を備えている。このベルトコンベヤ12は、例えば屋外に設置されており、そのキャリア側ベルト14上に、コークスや石灰石等の細状の被輸送物100が連続的に供給される。そして、図1に太実線の矢印16で示す方向(図1において左側から右側)にキャリア側ベルト14が走行することで、当該キャリア側ベルト14上の被輸送物100が同方向16へ連続的に輸送される。
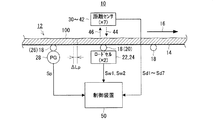
キャリア側ベルト14は、その走行方向16である水平方向に沿って並列に配置された複数の自由回転ローラ(プーリ)18,18,…によって支持されている。これら複数のローラ18,18,…の一部、例えば図1において中央に位置する1つのローラ20は、荷重検出手段としての例えば2台のロードセル22および24が付随された計量ローラである。また、この計量ローラ20とは別の1つのローラ18、例えば計量ローラ20の上流側(図1において左側)に隣接するローラ26には、キャリア側ベルト14の走行距離を検出するための走行距離検出手段としてのロータリ式のパルス発生器(PG)28が取り付けられている。さらに、キャリア側ベルト14の上方であって、当該キャリア側ベルト14(および被輸送物100)を挟んで計量ローラ20と対向する箇所に、位置検出手段としての複数、例えば7個の、非接触型の距離センサ30,32,34,36,38,40および42が配置されている。これらの距離センサ30〜42は、例えば赤外線反射式のものであり、図1に破線の矢印44で示すように被輸送物100の表面(上面)に向けて赤外線ビームを発射すると共に、これとは逆向きの矢印46で示すように被輸送物100の表面によって反射された当該赤外線ビームの反射光を受け、この間の時間に基づいて、それぞれの設置位置から被輸送物100の表面までの距離を測定する。
具体的には、図2に示すように、各距離センサ30〜42は、キャリア側ベルト14の走行方向(図2の紙面の表裏方向)に直交する平面(図2の紙面に沿う平面:以下、仮想平面と言う。)において、水平方向(図2における左右方向)に沿って一定の間隔uで配置されている。このうちの中央に位置する距離センサ36は、キャリア側ベルト14の中心Oの略真上にある。そして、両端に位置する距離センサ30および42は、キャリア側ベルト14の両側縁よりも少し内方寄り(中心O寄り)にある。なお、各距離センサ30〜42は、図示しない適当な支持部材を介して、ベルトコンベヤ12の図示しない基部に固定されている。
また、図2から分かるように、計量ローラ20は、上述の仮想平面において、上方に向かって概略凹状(下方に向かって概略凸状)を成すように直列配置された3つの個別ローラ20a,20bおよび20cを有するいわゆる3槽ローラである。これと同様に、走行距離検出用のローラ26を含む他のローラ18,18,…もまた、3槽ローラである。キャリア側ベルト14は、これらの3槽ローラ18,18,…によって支持されることで、その仮想平面による断面が上方に向かって概略凹状(下方に向かって概略凸状)に湾曲するように、つまり被輸送物100がこぼれ落ち難い形状となるように、整形される。なお、計量ローラ20は、これに付随された2台のロードセル22および24ならびに上述したのとは別の図示しない適当な支持部材を介して、ベルトコンベヤ12の基部に固定されている。そして、走行距離検出用のローラ26を含む他のローラ18,18,…は、図示しないさらに別の支持部材を介して、ベルトコンベヤ12の基部に固定されている。
図1に戻って、各ロードセル22および24は、自身に印加された荷重の大きさに応じた直流電圧値を持つアナログ荷重検出信号Sw1およびSw2を生成する。このアナログ荷重検出信号Sw1およびSw2は、ベルトコンベヤ12から離れた場所、例えば管理室、に設置された制御装置50に入力される。また、パルス発生器28は、キャリア側ベルト14がΔLpという比較的に短い所定の距離だけ走行するたびに、パルス信号Spを生成する。このパルス信号Spもまた、制御装置50に入力される。さらに、各距離センサ30〜42は、それぞれの距離測定値を表すデジタル態様の距離測定信号Sd1〜Sd7を生成する。これらの距離測定信号Sd1〜Sd7もまた、制御装置50に入力される。
制御装置50は、図3に示すように、各ロードセル22および24からのアナログ荷重検出信号Sw1およびSw2が入力される加算回路52を有している。加算回路52は、入力された各アナログ荷重検出信号Sw1およびSw2を加算する。加算後のアナログ荷重検出信号Sw(=Sw1+Sw2)は、増幅回路54によって適当に増幅された後、A/D変換回路56に入力される。なお、図には示さないが、増幅回路54の前段または後段には、アナログ荷重検出信号Swに含まれる比較的に高い周波数帯域のノイズ成分、主に電気的な要因によるノイズ成分、を除去するためのアナログローパスフィルタ回路が設けられている。
A/D変換回路56は、入力されたアナログ荷重検出信号Swを、クロックパルス生成手段としてのクロックパルス生成回路58から与えられるクロックパルスCLKの立ち上がり(または立ち下がり)に合わせてサンプリングする。これによって、アナログ荷重検出信号Swは、デジタル態様の信号(以下、これについてもSwという符号で表す。)に変換される。なお、このA/D変換回路56によるサンプリング周期、つまりクロックパルスCLKの周期ΔTsは、パルス発生器28から発生されるパルス信号Spの周期よりも遥かに短く、例えば1msである。
A/D変換回路56による変換後のデジタル荷重検出信号Swは、入出力インタフェース回路60を介して、演算手段としてのCPU(Central Processing Unit)62に入力される。このCPU62には、入出力インタフェース回路60を介して、クロックパルスCLKも入力される。また、CPU62には、入出力インタフェース回路60を介して、パルス発生器28からのパルス信号Spが入力されると共に、各距離センサ30〜42からの距離測定信号Sd1〜Sd7も入力される。ただし、パルス信号Spについては、その態様、特に電圧値が、CPU62の入力仕様に即さないため、パルス整形回路64によって適当に整形されてから、CPU62に入力される。
CPU62は、デジタル荷重検出信号Swとパルス信号Spとに基づいて、被輸送物100の輸送量を重量で表す輸送重量値Wを求める。併せて、CPU62は、各距離測定信号Sd1〜Sd7とパルス信号Spとに基づいて、被輸送物100の輸送量を体積で表す輸送体積値Vを求める。
これら輸送重量値Wおよび輸送体積値Vの具体的な算出要領については、後で詳しく説明するが、両者を比較すると、後述する理由から、輸送重量値Wの方が輸送体積値Vよりも精確である。その一方で、輸送重量値Wの算出要素である各ロードセル22および24ならびに計量ローラ20を含む重量測定系は、常にキャリア側ベルト14を介して振動荷重や衝撃荷重を受けている状態にある。これに対して、輸送体積値Vの算出要素である各距離センサ30〜42を含む非接触型の測定系は、そのような振動荷重や衝撃荷重を受けない。このため、重量測定系は、非接触型測定系よりも故障し易い。また、重量測定系の構成要素である各ロードセル22および24から出力されるアナログ荷重検出信号Sw1およびSw2の信号レベルは、極めて微小であり、ゆえに、非接触型測定系の構成要素である各距離センサ30〜42から出力されるデジタル態様の距離測定信号Sd1〜Sd7に比べて、当該各ロードセル22および24の性能劣化時の安定性に欠ける、という問題もある。言い換えれば、各ロードセル22および24を含む重量測定系は、各距離センサ30〜42を含む非接触型測定系に比べて、総じて性能劣化を起こし易い。
そこで、CPU62は、輸送重量値Wを言わば主たる輸送量として取り扱い、輸送体積値Vについては言わば副次的な輸送量として取り扱う。つまり、重量測定系が正常であるときには、精確な輸送量である輸送重量値Wを、情報出力手段としてのディスプレイ66に表示する。そして、重量測定系に故障等の異常が発生したときには、副次的な輸送量である輸送体積値Vを、当該輸送重量値Wと同じ単位である後述する推定重量値W’に変換した上で、言わば暫定的に、ディスプレイ66に表示する。なお、ディスプレイ66は、入出力インタフェース60を介して、CPU62に接続されている。
重量測定系が正常であるか否かは、輸送重量値Wと輸送体積値Vとの比較に基づいて、判断される。即ち、CPU62は、輸送重量値Wと輸送体積値Vとを比較して、厳密には次の式1で表される見かけ比重値Kを監視して、この見かけ比重値Kに過度な変化が生じたときに、重量測定系に異常が発生したものと判断する。
《式1》
K=W/V
この式1で表される見かけ比重値Kは、重量測定系が正常であるときには、概ね一定である。そして、重量測定系に異常が発生すると、輸送重量値Wが異常値になるため、当該見かけ比重値Kは過度に変化する。なお、非接触型測定系についても、当然に、故障等の異常が発生する可能性があるが、その確率は、重量測定系に比べて極めて低い。また、定期的な保守点検作業等によって、重量測定系および非接触型測定系それぞれの構成要素が適宜に交換されれば、寿命の長い非接触型測定系については、その異常の発生確率がさらに低くなる。従って、ここでは、重量測定系および非接触型測定系のうち、重量測定系のみについて、異常が発生する可能性があり、非接触型測定系については、常に正常である、という前提が立てられる。
即ち、CPU62は、見かけ比重値Kが概ね一定であるときには、重量測定系が正常である、と判断する。この場合、上述したように、輸送重量値Wをディスプレイ66に表示する。そして、見かけ比重値Kが過度に変化したときには、重量測定系に異常が発生したものと、判断する。この場合、輸送体積値Vを変数とする次の式2に基づいて重量推定値W’を算出し、この重量推定値W’をディスプレイ62に表示する。なお、式2におけるKsは、見かけ比重値Kの標準的な値である基準比重値である。この基準比重値Ksについても、後で詳しく説明する。
《式2》
W’=Ks・V
このように、本実施形態によれば、重量測定系が正常であるときには、輸送重量値Wという精確な輸送量に関する情報がディスプレイ66に表示される。そして、重量測定系に異常が発生したときには、輸送体積値Vという副次的に精確な輸送量に基づいて求められた推定重量値W’がディスプレイ66に表示される。つまり、重量測定系に異常が発生しても、被輸送物100の輸送量を求めるというコンベヤスケール10本来の機能が確実に保証される。これは、例えば、コンベヤスケール10の運転を直ちに停止させることができない状況下において、特に有効である。また、重量測定系が正常であるか否かは、輸送重量値Wと輸送体積値Vとの比である見かけ比重値Kに基づいて判断される。つまり、輸送体積値Vの算出要素である非接触型測定系は、当該重量測定系が正常であるか否かを判断する際の比較対照手段としても機能する。従って、重量測定系が正常であるか否かを調べるための特別な手段を別途に設ける必要はなく、ゆえに、コンベヤスケール10全体の構成が簡素化される。
なお、CPU62には、入出力インタフェース回路60を介して、当該CPU62に各種命令を入力するための命令入力手段としての操作キー68も接続されている。この操作キー68は、ディスプレイ66と一体化されたものでもよく、例えばタッチスクリーンによって実現されてもよい。また、CPU62には、記憶手段としてのメモリ回路70が接続されている。このメモリ回路70には、CPU62の動作を制御するための制御プログラムが記憶されている。
さて、CPU62は、具体的に次の要領で、輸送重量値Wを求める。
即ち、CPU62は、上述のパルス信号Spが1パルス入力されるたびに(厳密にはパルス信号Spの立ち上がりまたは立ち下がりを検出するたびに)、つまりキャリア側ベルト14が所定距離ΔLpだけ走行するたびに、デジタル荷重検出信号Swに基づいて、働長Ld上にある被輸送物100の重量、いわゆる瞬間荷重Wd[n](n:パルス信号Spの入力順を表すインデックス)を、求める。なお、働長Ldの定義および瞬間荷重Wd[n]の求め方については、公知であるので、ここでの説明は省略する。そして、CPU62は、次の式3に基づいて、所定距離ΔLp分の被輸送物100の輸送重量値W[n]を求める。
《式3》
W[n]=Wd[n]・(ΔLp/Ld)
さらに、CPU62は、パルス信号SpがN(N:1以上の整数)パルス入力されるたびに、その期間を1区分とし、次の式4に基づいて、当該1区分m(m:区分の番号を表すインデックス)分の輸送重量値W[m]を求める。
《式4》
W[m]=ΣW[n] where n=1〜N
CPU62は、この式4に基づいて求められた輸送重量値W[m]をディスプレイ66に表示する。そして、同じ要領で1区分mごとに輸送重量値W[m]を求め、ディスプレイ66に表示し、つまり当該ディスプレイ66に表示された輸送重量値W[m]を更新する。なお、パルス信号Spの入力順を表すインデックスnの値は、区分mが更新されるたびにリセット(n=1)される。また、CPU62は、重量測定値W[m]を累積して、その累積値をディスプレイ66に表示することもできる。
これと併せて、CPU62は、次の要領で、輸送体積値Vを求め、ひいては重量推定値W’を求める。
まず、CPU62は、上述した仮想平面上に、図4に示すようなX−Y直交座標を形成する。具体的には、キャリア側ベルト14の中心Oが、原点とされる。そして、この原点Oを通る水平な直線が、X軸とされ、当該原点Oを通る鉛直線が、Y軸とされる。なお、図4は、キャリア側ベルト14の下流側から当該キャリア側ベルト14の上流側に向かう視線で仮想平面を見た図であり、この図4においては、Y軸よりも右側が、X軸の正領域とされ、Y軸よりも左側が、X軸の負領域とされている。そして、X軸よりも上方側が、Y軸の正領域とされ、X軸よりも下方側が、Y軸の負領域とされている。
このような直交座標上において、CPU62は、キャリア側ベルト14の上面が成す曲線を、fb(x)という関数式で表す。なお、この関数式fb(x)は、例えばキャリア側ベルト14の上面の形状および寸法の実測結果、或いはそれらの設計値に基づいて、求められる。そして、CPU62は、キャリア側ベルト14の左側側縁のX軸値を、−αとし、右側側縁のX軸値を、αとする。
ここで、各距離センサ30〜42の配置位置に注目すると、当該各距離センサ30〜42の配置位置のX軸値は、それぞれ−3・u,−2・u,−u,0,u,2・uおよび3・uとなる。従って、例えば、図4において左端にある距離センサ30は、自身の設置位置から−3・uというX軸値上の被輸送物100の表面位置P1までの距離H1を測定することになる。これと同様に、距離センサ32は、自身の設置位置から−2・uというX軸値上の被輸送物100の表面位置P2までの距離H2を測定することになる。そして、距離センサ34は、自身の設置位置から−uというX軸値上の被輸送物100の表面位置P3までの距離H3を測定し、中央の距離センサ36は、自身の設置位置からY軸上の被輸送物100の表面位置P4までの距離H4を測定する。さらに、距離センサ38は、自身の設置位置からuというX軸値上の被輸送物100の表面位置P5までの距離H5を測定し、距離センサ40は、自身の設置位置から2・uというX軸値上の被輸送物100の表面位置P6までの距離H6を測定する。そして、右端にある距離センサ42は、自身の設置位置から3・uというX軸値上の被輸送物100の表面位置P7までの距離H7を測定することになる。
CPU62は、パルス信号Spが1パルス入力されるたびに、つまりキャリア側ベルト14が所定距離ΔLpだけ走行するたびに、各距離センサ30〜40からの距離測定信号Sd1〜Sd7に基づいて、当該各距離センサ30〜40の設置位置から被輸送物100の各表面位置P1〜P7までの距離H1〜H7を認識する。そして、これらの距離H1〜H7を各距離センサ30〜40の設置位置のY軸値Hsから差し引くことによって、つまり次の式5に基づいて、被輸送物100の各表面位置P1〜P7のY軸値y1[n]〜y7[n]を求める。
《式5》
y1[n]=Hs−H1
y2[n]=Hs−H2
y3[n]=Hs−H3
y4[n]=Hs−H4
y5[n]=Hs−H5
y6[n]=Hs−H6
y7[n]=Hs−H7
さらに、CPU62は、キャリア側ベルト14の左側側縁と左端にある距離センサ30の配置位置とのX軸上の中点を特定し、この中点のX軸値を−u’(=−(α+3・u)/2)とする。そして、このX軸値−u’上のキャリア側ベルト14の上面位置をP0とする。この位置P0のY軸値は、キャリア側ベルト14の上面形状を表す上述の2次関数式fb(x)に当該中点のX軸値−u’を代入することによって求められ、つまりfb(−u’)となる。
これと同様に、CPU62は、キャリア側ベルト14の右側側縁と右端にある距離センサ42の配置位置とのX軸上の中点を特定し、この中点のX軸値をu’(=(α+3・u)/2)とする。そして、このX軸値u’上のキャリア側ベルト14の上面位置をP8とする。この位置P8のY軸値もまた、キャリア側ベルト14の上面形状を表す2次関数式fb(x)に当該中点のX軸値u’を代入することによって求められ、つまりfb(u’)となる。
CPU62は、上述した1区分mごとに被輸送物100の各表面位置P1〜P7それぞれのY軸値y1[n]〜y7[n]の平均値y1a[m]〜y7a[m]を求める。具体的には、次の式6に基づいて、パルス信号SpがNパルス入力された時点での当該平均値y1a[m]〜y7a[m]を求める。
《式6》
y1a[m]={Σy1[n]}/N
y2a[m]={Σy2[n]}/N
y3a[m]={Σy3[n]}/N
y4a[m]={Σy4[n]}/N
y5a[m]={Σy5[n]}/N
y6a[m]={Σy6[n]}/N
y7a[m]={Σy7[n]}/N
where n=1〜N
そして、CPU62は、上述の−u’というX軸値上の位置P0と、左端の距離センサ30によるターゲット位置P1と、を結ぶ線分P0P1を仮想し、この線分P0P1をf0p(x)という1次関数式で表す。これと同様に、左端の距離センサ30によるターゲット位置P1と、隣接する距離センサ32によるターゲット位置P2と、を結ぶ線分P1P2を仮想し、この線分P1P2をf1p(x)という1次関数式で表す。さらに、距離センサ32によるターゲット位置P2と、右側に隣接する距離センサ34によるターゲット位置P3と、を結ぶ線分P2P3を仮想し、この線分P2P3をf2p(x)という1次関数式で表すと共に、距離センサ34によるターゲット位置P3と、右側に隣接する中央の距離センサ36によるターゲット位置P4と、を結ぶ線分P3P4を仮想し、この線分P3P4をf3p(x)という1次関数式で表す。そして、中央の距離センサ36によるターゲット位置P4と、右側に隣接する距離センサ38によるターゲット位置P5と、を結ぶ線分P4P5を仮想し、この線分P4P5をf4(x)という1次関数式で表すと共に、距離センサ38によるターゲット位置P5と、右側に隣接する距離センサ40によるターゲット位置P6と、を結ぶ線分P5P6を仮想し、この線分P5P6をf5p(x)という1次関数式で表す。そして、距離センサ40によるターゲット位置P6と、右側に隣接する右端の距離センサ42によるターゲット位置P7と、を結ぶ線分P6P7を仮想し、この線分P6P7をf6p(x)という1次関数式で表すと共に、右端の距離センサ43によるターゲット位置P7と、上述のu’というX軸値上の位置P8と、を結ぶ線分P7P8を仮想し、この線分P7P8をf7p(x)という1次関数式で表す。つまり、仮想平面上における被輸送物100の表面形状を、f0p(x)〜f7p(x)の8つの1次関数式で表す。なお、図4においては、紙面の制約上、これら8つの1次関数式f0p(x)〜f7p(x)を表す8つの線分P0P1〜P7P8が、fp(x)という1つの符号で纏めて示されている。
その上で、CPU62は、P0〜P8の各位置をそれぞれ通る鉛直線を境界として、仮想平面による被輸送物100の断面を8つの領域に分割する。そして、これら8つの領域の各断面積A0〜A7を、次の式7に基づいて算出する。なお、この式7におけるキャリア側ベルト14の上面形状を表す関数式fb(x)についても、それぞれの領域ごとに個別に定められてもよい。
《式7》
A0=∫−u’ −3・u{f0p(x)−fb(x)}・dx
A1=∫−3・u −2・u{f1p(x)−fb(x)}・dx
A2=∫−2・u −u{f2p(x)−fb(x)}・dx
A3=∫−u 0{f3p(x)−fb(x)}・dx
A4=∫0 u{f4p(x)−fb(x)}・dx
A5=∫u 2・u{f5p(x)−fb(x)}・dx
A6=∫2・u 3・u{f6p(x)−fb(x)}・dx
A7=∫3・u u’{f7p(x)−fb(x)}・dx
さらに、CPU62は、これら8つの領域の各断面積A0〜A7を合計することで、つまり次の式8に基づいて、仮想平面による被輸送物100の全断面積A[m]を求める。
《式8》
A[m]=A0+A1+A2+A3+A4+A5+A6+A7
このような被輸送物100の断面積A[m]の算出要領によれば、例えば図5に示す如く当該被輸送物100の量そのものが少なかったり、或いは図6に示す如く当該被輸送物100が分散された状態で積載されたりすることによって、各距離センサ30〜42によるターゲット位置P1〜P7の一部が被輸送物100の表面から外れてしまう場合でも、つまりキャリア側ベルト14の上面に直接当たる場合でも、当該被輸送物100の断面積A[m]が或る程度の精度で求められる。
そして、CPU62は、このようにして求められた被輸送物100の断面積A[m]に1区分m分のキャリア側ベルト14の走行距離(=N・ΔLp)を乗ずることで、つまり次の式9に基づいて、当該1区分m分の被輸送物100の輸送体積V[m]を求める。
《式9》
V[m]=A[m]・N・ΔLp
CPU62は、上述の輸送重量値W[m]と同様、この輸送体積値V[m]についても、1区分mごとに求める。
なお、この輸送体積値V[m]の算出要領から分かるように、当該算出要領においては、被輸送物100の表面のP1〜P7という離散的な7つの位置と、P0およびP8という仮想的に設定された2つの位置と、に基づいて、当該被輸送物100の表面形状を表す関数式f0p(x)〜f7p(x)が立てられ、ひいては当該被輸送物100の表面積A[m]が求められ、さらに当該輸送体積値V[m]が求められる。従って、図2および図4に示したように、極端には図5および図6に示したように、被輸送物100の表面に不特定かつ多数の凹凸があることを鑑みると、当該輸送体積値V[m]は、重量測定系に基づく輸送重量値W[m]に比べて、精確性で劣る。ただし、輸送重量値W[m]に代わる副次的な意義においては、当該輸送体積値V[m]は、十分に有益である。
加えて、CPU62は、1区分mごとに、上述の式1に準拠する次の式10に基づいて、見かけ比重値K[m]を求める。
《式10》
K[m]=W[m]/V[m]
そして、CPU62は、この見かけ比重値K[m]を監視して、これが過度に変化しないかどうか、つまり重量測定系が正常であるかどうか、を判断する。
具体的には、CPU62は、見かけ比重値K[m]と、上述した基準比重値Ksと、を比較する。そして、両者の相違度合を求め、要するに基準比重値Ksに対する見かけ比重値K[m]の言わば絶対的な変動度合を求める。具体的には、次の式11に基づいて、絶対変動量E[m]を求める。
《式11》
E[m]=|K[m]−Ks|
なお、基準比重値Ksは、事前の調整運転時に定められる。詳しくは、事前の調整運転時に、実際の稼働時と同じ条件で被輸送物100が輸送される。この状態で、所定のM(M:1以上の整数)区分にわたって見かけ比重値K[m]が求められる。そして、このM区分にわたる見かけ比重値K[m](m=1〜M)の平均値が、基準比重値Ksとして定められる。つまり、基準比重値Ksは、次の式12に基づいて定められる。これとは別に、基準比重値Ksとして、既知の値が設定されてもよい。
《式12》
Ks={ΣK[m]}/M where m=1〜M
さらに、CPU62は、式11に基づいて求められた絶対変動量E[m]と、予め定められた許容絶対変動量Emaxと、を比較する。ここで言う許容絶対変動量Emaxとは、見かけ比重値K[m]の絶対的な変動量として許容される限界値であり、この許容絶対変動量Emaxもまた、事前の調整運転時に定められる。詳しくは、見かけ比重値K[m]が最大でe%変動することが見込まれる場合には、この言わば許容変動率eが基準比重値Ksに乗ぜられることによって、つまり次の式13に基づいて、当該許容絶対変動量Emaxが定められる。なお、許容変動率eの値は、任意に設定可能である。
《式13》
Emax=(e/100)・Ks
この許容絶対変動量Emaxと、式11に基づいて求められた絶対変動量E[m]と、を比較した結果、当該絶対変動量E[m]が許容絶対変動量Emax以下であるとき、つまり次の式14が満足されるとき、CPU62は、重量測定系が正常である、と判断する。一方、式14が満足されないときは、重量測定系に異常が発生した、と判断する。
《式14》
E[m]≦Emax
このように、CPU62は、見かけ比重値K[m]が、その絶対的な基準である基準比重値Ksと比べて、過度に変化していないかどうかを監視することによって、重量測定系が正常であるか否かを判断する。この監視要領によれば、見かけ比重値K[m]が比較的に長い期間を掛けて変化した場合でも、これを適確に検知することができる。要するに、そのような状況を誘発させる重量測定系の異常を適確に検知することができる。なお、通常は、ベルトコンベヤ12(キャリア側ベルト14)上を搬送される被輸送物100の実際の重量と、当該被輸送物100の実際の体積とは、互いに対応するので、これら実際の重量および実際の体積が増減したとしても、両者の比である実際の見かけ比重値は、概ね一定であり、大きく変動することはない。このような性質から、上述の如く見かけ比重値K[m]を監視することで、重量測定系の異常の有無が適確に検知される。
これとは別の監視要領として、CPU62は、1区分mごとの見かけ比重値K[m]の変動量ΔK[m]をも監視する。即ち、1区分mごとに、その1つ前の区分m−1との間で、互いの見かけ比重値K[m]およびK[m−1]を比較する。そして、次の式15に基づいて、両者の差、言わば相対的な変化度合を表す相対変動量ΔK[m]を、求める。
《式15》
ΔK[m]=|K[m]−K[m−1]|
さらに、CPU62は、この式15に基づいて求められた相対変動量ΔK[m]と、予め定められた許容相対変動量ΔKmaxと、を比較する。ここで言う許容相対変動量ΔKmaxとは、1区分という一定の期間内における見かけ比重値K[m]の変動量として許容される限界値であり、この許容相対変動量ΔKmaxもまた、事前の調整運転時に定められる。詳しくは、見かけ比重値K[m]は一定のバラツキを持つ、という前提の下、上述したM区分にわたる見かけ比重値K[m](m=1〜M)の標準偏差σkが求められる。そして、隣接する2つの区分mおよびm−1間では、互いの見かけ比重値K[m]およびK[m−1]に最大で当該標準偏差σkのβ(β:正数)倍の差があるものと仮定され、これを根拠に、次の式16に基づいて、許容相対変動量ΔKmaxが定められる。なお、ここで言う係数βの値としては、例えばβ=3〜4程度が適当である。
《式16》
ΔKmax=β・σ where β=3〜4
この許容相対変動量ΔKmaxと、式15に基づいて求められた相対変動量ΔK[m]と、を比較した結果、当該相対変動量ΔK[m]が許容相対変動量ΔKmax以下であるとき、つまり次の式17が満足されるとき、CPU62は、上述の式14が満足されることを条件として、重量測定系が正常である、と判断する。一方、式17が満足されないときは、重量測定系に異常が発生した、と判断する。
《式17》
ΔK[m]≦ΔKmax
このように、CPU62は、1区分mごとの見かけ比重値K[m]の変動量ΔK[m]を監視することによっても、重量測定系が正常であるか否かを判断する。この監視要領によれば、当該1区分mごとという比較的に短い期間内に変化したとしても、これを適確に検知することができる。要するに、そのような状況を誘発させる重量測定系の異常を適確に検知することができる。
CPU62は、重量測定系が正常であるときに、つまり式14および式17の両方が満足されるときに、上述の如く輸送重量値W[m]をディスプレイ66に表示する。なお、このとき、当該重量測定系が正常であることを表すメッセージをディスプレイ66に表示してもよい。
一方、重量測定系に異常が発生しているときには、つまり式14および式17の少なくともいずれかが満足されないときには、その旨を表す警告メッセージをディスプレイ66に表示する。そして、この異常時には、上述の式2に準拠する次の式18に基づいて推定重量値W’[m]を算出すると共に、この重量推定値W’[m]をディスプレイ66に表示する。この暫定的な状態は、重量測定系の異常が解消されるまで、継続される。
《式18》
W’[m]=Ks・V[m]
上述したように、CPU62の動作は、メモリ回路70に記憶されている制御プログラムによって制御されるが、具体的には、次の通りである。
まず、事前の調整運転時に、操作キー68の操作によって調整モードが選択されると、CPU62は、図7のフローチャートで示される調整タスクを実行する。なお、この調整タスクの実行に先立って、上述のキャリア側ベルト14の表面形状を表す関数式fb(x)と、許容変動率eと、係数βとが、適宜に設定される。併せて、1区分m分のパルス数Nと、調整タスクにおける繰り返し実行区分数Mとが、設定される。また、言うまでもなく、各距離センサ30〜42の配置位置のX軸値−3・u,−2・u,−u,0,u,2・uおよび3・uは、既知であり、当該各距離センサ30〜42の配置位置のY軸値Hsも既知である。
この調整タスクにおいて、CPU62は、最初にステップS1の初期設定を行う。詳しくは、上述したパルス信号Spのパルス番号を表すインデックス値nをリセットすると共に、区分mを表すインデックス値mをリセットする。つまり、各インデックス値nおよびmとして“1”を設定する。
そして、CPU62は、ステップS3に進み、1パルス分のパルス信号Spが入力されるまで待機し、当該パルス信号Spが入力されると、ステップS5に進む。このステップS5において、CPU62は、各距離センサ30〜42から距離測定信号Sd1〜Sd7を取得し、その後、ステップS7に進み、上述の式5に基づいて、当該各距離センサ30〜42によるターゲット位置P1〜P7のY軸値y1[n]〜y7[n]を算出する。なお、両端のターゲット位置P1〜P7のさらに外方に設定された2つの仮想位置P0およびP8のY軸値fb(−u’)およびfb(u’)は、キャリアベルト14の表面形状を表す関数式fb(x)が設定された時点で定められる。
さらに、CPU62は、ステップS9に進み、デジタル荷重検出信号Swを取得する。そして、ステップS11に進み、式3に基づいて、所定距離ΔLp分の被輸送物100の輸送重量値W[n]を算出し、その後、ステップS13に進む。
ステップS13において、CPU62は、パルス信号Spのパルス番号を表すインデックス値nと、1区分m分の総パルス数Nとを、比較する。つまり、1区分mの終期が到来したか否かを判定する。ここで、例えば、当該インデックス値nが1区分m分の総パルス数Nよりも小さい場合(n<N)、CPU62は、1区分mの終期が未だ到来していないものと判定して、ステップS15に進む。そして、このステップS15において、当該インデックス値nを“1”だけインクリメントした後、次のパルス信号Spの入力を待つべく、ステップS3に戻る。一方、ステップS13において、インデックス値nが1区分m分の総パルス数N以上である場合(n≧N)、厳密には当該インデックス値nが1区分m分の総パルス数Nと等価である場合(n=N)は、1区分m分の終期が到来したものと判定して、ステップS17に進む。
ステップS17において、CPU62は、式6に基づいて、各距離センサ30〜42によるターゲット位置P1〜P7のY軸平均値y1a[n]〜y7a[n]を算出する。そして、ステップS19に進み、被輸送物100の表面形状を表す8つの1次関数式f0p(x)〜f7p(x)を導き出す。さらに、CPU62は、ステップS21に進み、式7に基づいて、仮想平面による被輸送物100の断面の細分化された8つの領域それぞれの断面積A0〜A7を求める。そして、ステップS23に進み、式8に基づいて、当該仮想平面による被輸送物100の全断面積A[m]を求め、その後、ステップS25に進み、式9に基づいて、1区分m分の輸送体積値V[m]を求める。
ステップS25の実行後、CPU62は、ステップS27に進み、式4に基づいて、1区分m分の輸送重量値W[m]を求める。そして、ステップS29に進み、式10に基づいて、見かけ比重値K[m]を求めた後、さらに、ステップS31に進み、区分mを表すインデックス値mと、この調整タスクにおける繰り返し実行区分数Mとを、比較する。要するに、当該繰り返し実行区分数M分の見かけ比重値K[m]が得られたか否か、言い換えれば区分Mの見かけ比重値K[M]が得られたか否か、を判定する。
ステップS31において、例えば、区分mを表すインデックス値mが繰り返し実行区分数Mよりも小さい場合(m<M)、CPU62は、当該繰り返し実行区分数M分の見かけ比重値K[m]が未だ得られていないものと判定して、ステップS33に進む。そして、このステップS33において、区分mを表すインデックス値mを“1”だけインクリメントし、さらに、ステップS35において、パルス信号Spのパルス番号を表すインデックス値nをリセットした後、新たなパルス信号Spの入力を待つべく、ステップS3に戻る。一方、ステップS31において、区分mを表すインデックス値mが繰り返し実行区分数M以上である場合(m≧M)、厳密には当該インデックス値mが繰り返し実行区分数Mと等価である場合(m=M)は、繰り返し実行区分数M分の見かけ比重値K[m]が得られたものと判定して、ステップS37に進む。
ステップS37において、CPU62は、式12に基づいて、基準比重値Ksを求める。そして、ステップS39に進み、式13に基づいて、許容絶対変動量Emaxを求め、さらに、ステップS41に進み、式16に基づいて、許容相対変動量ΔKmaxを求める。そして、ステップS43に進み、調整モードによる一連の処理が終了したことを表すメッセージを一定期間(数秒間程度)にわたってディスプレイ66に表示した後、この調整タスクを終了する。
続いて、実際の稼働時に、操作キー68の操作によって稼働モードが選択されると、CPU62は、図8および図9のフローチャートで示される稼働タスクを実行する。
この稼働タスクにおいて、CPU62は、まず、図8のステップS101に進み、初期設定を行う。詳しくは、パルス信号Spのパルス番号を表すインデックス値nをリセットすると共に、区分mを表すインデックス値mをリセットする。併せて、重量測定系が正常であるか否かを表す指標としてのフラグFに“0(ゼロ)”をセットする。なお、このフラグFは、これが“0”であるときには、重量測定系が正常であることを表し、“1”であるときには、重量測定系に故障等の異常が発生していることを表す。
このステップS101の初期設定の実行後、CPU62は、ステップS103に進むが、当該ステップS103〜ステップS125については、図7に示した調整タスクにおけるステップS3〜ステップS25の処理と全く同じである。従って、ステップS103〜ステップS125についての詳しい説明は省略する。
ステップS125の次のステップS127において、CPU62は、上述のフラグFに“0”がセットされているか否か、つまり重量測定系が正常であるか否か、を判定する。ここで、例えば、当該フラグFに“0”がセットされている場合、つまり重量測定系が正常な場合、CPU62は、図9のステップS129に進む。そして、このステップS129において、式4に基づいて、1区分m分の輸送重量値W[m]を求めた後、ステップS131に進み、当該1区分m分の輸送重量値W[m]をディスプレイ66に表示する。なお、この輸送重量値W[m]のディスプレイ66への表示は、例えば次にステップS131が実行されるまでの間、継続される。ただし、ステップS131の実行後、上述のフラグFに“1”がセットされた場合には、後述するように、次に当該ステップS131が実行されることはない。この場合、当該ステップS131における輸送重量値W[m]の表示は、後述するステップS163が実行されるときに終了される。
ステップS131の実行後、CPU62は、ステップS133に進み、式10に基づいて、見かけ比重値K[m]を求める。さらに、CPU62は、ステップS135に進み、式11に基づいて、当該見かけ比重値K[m]の絶対変動量E[m]を求める。そして、ステップS137に進み、この絶対変動量E[m]と、許容絶対変動量Emaxとを、比較する。
このステップS137において、例えば、見かけ比重値K[m]の絶対変動量E[m]が許容絶対変動量Emax以下である場合(E[m]≦Emax)、つまり式14が満足される場合、CPU62は、重量測定系が正常である、厳密には当該絶対変動量E[m]が正常値の範囲内である、と判定する。そして、ステップS141に進む。
一方、ステップS137において、見かけ比重値K[m]の絶対変動量E[m]が許容絶対変動量Emaxよりも大きい場合(E[m]>Emax)、つまり式14が満足されない場合、CPU62は、重量測定系が異常である、厳密には当該絶対変動量E[m]が異常値である、と判定する。この場合、ステップS137からステップS143に進む。そして、このステップS143において、重量測定系が異常であることを表すメッセージをディスプレイ66に表示する。このとき、絶対変動量E[m]が異常値であることをも併せて表示する。なお、このステップS143におけるメッセージの表示は、例えば重量測定系の異常が解消されるまで、要するにコンベヤスケール10の稼働が一旦停止されるまで、継続される。そして、CPU62は、ステップS145に進み、フラグFに“1”をセットした後、ステップS141に進む。
ステップS141において、CPU62は、区分mを表すインデックス値mがm=1であるか否か、つまり今現在の区分mが1つ目であるか否か、を判定する。ここで、当該インデックス値mがm=1である場合、つまり今現在の区分mが1つ目である場合は、ステップS14に進み、当該インデックス値mを“1”だけインクリメントする。さらに、ステップS149に進み、パルス信号Spのパルス番号を表すインデックス値nを値セットした後、新たなパルス信号Spの入力を待つべく、図8のステップS103に戻る。一方、ステップS141において、区分mを表すインデックス値mがm=1でない場合、つまり今現在の区分mが少なくとも2つ目以降である場合は、ステップS151に進む。
ステップS151において、CPU62は、式15に基づいて、1区分mごとの見かけ比重値K[m]の変動量ΔK[m]を求める。そして、ステップS153に進み、この変動量ΔK[m]と、許容相対変動量ΔKmaxと、を比較する。ここで、例えば、見かけ比重値K[m]の変動量ΔK[m]が許容相対変動量ΔKmax以下である場合(ΔK[m]≦ΔKmax)、つまり式17が満足される場合、CPU62は、重量測定系が正常である、厳密には当該変動量ΔK[m]が正常値の範囲内である、と判定する。そして、ステップS147に進む。
一方、ステップS153において、1区分mごとの見かけ比重値K[m]の変動量ΔK[m]が許容相対変動量ΔKmaxよりも大きい場合(ΔK[m]>ΔKmax)、つまり式17が満足されない場合、CPU62は、重量測定系が異常である、厳密には当該変動量ΔK[m]が異常値である、と判定する。そして、ステップS157に進み、重量測定系が異常であることを表すメッセージをディスプレイ66に表示する。このとき、1区分mごとの見かけ比重値K[m]の変動量ΔK[m]が異常値であることをも併せて表示する。なお、このステップS157におけるメッセージの表示は、例えば重量測定系の異常が解消されるまで、要するにコンベヤスケール10の稼働が一旦停止されるまで、継続される。そして、CPU62は、ステップS159に進み、フラグFに“1”をセットした後、ステップS147に進む。
さらに、図8のステップS127において、フラグFに“1”がセットされている場合、つまり重量測定系に異常が生じている場合、CPU62は、ステップS161に進む。そして、このステップS161において、式18に基づいて、重量推定値W’[m]を求めた後、ステップS163に進み、当該重量推定値W’[m]をディスプレイ66に表示する。なお、この重量推定値W’[m]のディスプレイ66への表示は、例えば次にステップS163が実行されるまでの間、継続される。そして、CPU62は、このステップS163から図9のステップS147に進む。つまり、フラグFに“1”がセットされているときには、図9のステップS129〜ステップS145およびステップS151〜ステップS159はスキップされ、実行されない。
なお、本実施形態においては、1つの計量ローラ20を2台のロードセル22および24によって支持する構成としたが、これに限らない。例えば、複数の計量ローラを備えてもよいし、1台または3台以上のロードセルを備えてもよい。また、本実施形態のようなアナログ式ではなく、デジタル式のロードセルを採用してもよい。
そして、キャリア側ベルト14については、水平方向に沿って走行するものとしたが、傾斜角を持って走行するものであってもよい。また、当該キャリア側ベルト14は、3槽ローラ18,18,…によって支持されることで、その仮想平面による断面が上方に向かって概略凹状に湾曲するように整形されたが、特段な必要性がなければ、このような整形は成されなくてもよい。つまり、各ローラ18,18,…は、3槽のものに限らない。言い換えれば、キャリア側ベルト14(コンベヤベルト)は、いわゆる平ベルトであってもよい。
加えて、走行距離検出手段として、ロータリ式のパルス発生器28を採用したが、これに限らない。例えば、キャリア側ベルト14を含むコンベヤベルトに、その走行方向に沿って一定間隔で適当なマークを付すと共に、このマークを光学式等の適当なセンサによって検出することで、当該キャリア側ベルト14の走行距離を検出するようにしてもよい。また、上述した特許文献2としての特開2004−144643号公報に開示されているのと同様に、各距離センサ30〜42のいずれかの上流側または下流側に同じ仕様の距離センサを設け、これら両センサによって互いに同じターゲット位置を検知したときの時間差に基づいて、キャリア側ベルト14の走行距離を求めるようにしてもよい。
さらに、7個の距離センサ30〜42を用いたが、これ以外の個数の距離センサを用いてもよい。また、当該距離センサ30〜42として、赤外線反射式のものを採用したが、レーザ式や超音波式等の当該赤外線反射式以外のものを採用してもよい。極端には、監視カメラを採用し、その撮影画像を解析することによって、被輸送物100の表面形状を求めてもよい。
そして、キャリア側ベルト14の上面形状を表す関数式fb(x)については、当該キャリア側ベルト14に被輸送物100が積載されていない空荷状態にあるときの各距離センサ30〜42からの距離測定信号Sd1〜Sd7に基づいて、求めてもよい。
また、重量測定系が正常なときには、輸送重量値W[m]をディスプレイ66に表示し、重量測定系に異常が発生したときには、推定重量値W’[m]をディスプレイ66に表示することとしたが、これに限らない。例えば、重量測定系が正常なときには、輸送重量値W[m]に加えて、推定重量値W’[m]をも表示させてもよい。そして、重量測定系が正常であるか否かに拘らず、輸送体積値V[m]については、常に表示させてもよい。若しくは、操作キー68による操作(つまり手動操作)によって、輸送重量値W[m],輸送体積値V[m]および推定重量値W’[m]の一部または全部を選択的に表示させるようにしてもよい。さらに、ディスプレイ66への表示のみならず、管理用のパーソナルコンピュータや印刷装置等の外部装置に、これらの情報を出力させてもよい。
そして、重量測定系に異常が発生したときに、警告メッセージをディスプレイ66に表示することとしたが、これに限らない。例えば、適当なランプ等の照明を点灯させたり、或いは、ブザーやベル等の適当な警報器を鳴動させたりしてもよい。また、スピーカから音声で当該警告メッセージを出力させてもよい。
さらに、式11に基づく見かけ比重値K[m]の絶対変動量E[m]については、1区分mごとに求めることとしたが、これに限らない。例えば、一定数の区分q(q:1以上の整数)置きに、当該絶対変動量E[m]を求めてもよい。また、定期的ではなく、不定期的に、当該絶対変動量E[m]を求めてもよい。
そしてさらに、式11に基づく絶対変動量E[m]に代えて、例えば、次の式19に基づいて、絶対変動率E’[m]を求め、この絶対変動率E’[m]と、式20に基づく許容絶対変動率Emax’と、を比較することによって、重量測定系が正常であるか否かを判断してもよい。
断してもよい。
《式19》
E’[m]=|(K[m]−Ks)/Ks|
《式20》
Emax’=e/100
また、式15に基づく見かけ比重値K[m]の相対変動量ΔK[m]については、1区分ごとに求めることとし、つまり隣接する区分mおよびm−1間の見かけ比重値K[m]およびK[m−1]の差としたが、これに限らない。例えば、互いに一定数の区分r(r:2以上の整数)だけ離れた2つの区分mおよびm−r間の見かけ比重値K[m]およびK[m]の差に基づいて、相対変動量ΔK[m]を求めてもよい。つまり、式15に代えて、次の式21に基づいて、当該相対変動量ΔK[m]を求めてもよい。
《式21》
ΔK[m]=|K[m]−K[m−r]|
そして、この式21または上述の式15に基づく相対変動量ΔK[m]に代えて、例えば次の式22に基づいて、相対変動率ΔK’[m]を求め、この相対変動率ΔK’[m]と、式23に基づく許容相対変動率ΔKmax’と、を比較することによって、重量測定系が正常であるか否かを判断してもよい。なお、式23におけるγは、任意に設定可能な許容変動率(%)である。
《式22》
ΔK’[m]=|(K[m]−K[m−1])/K[m]|
《式23》
ΔKmax’=γ/100
加えて、図4を参照しながら説明したように、仮想平面上における被輸送物100の表面形状を、f0p(x)〜f7p(x)の8つの1次関数式で表したが、これに限らない。例えば、2次関数式で表してもよい。この場合、P0〜P8の各位置のうち、隣接する2つの一方のY軸値が、最大値となり、他方のY軸値が、最小値となる。いずれにしても、隣接する2つのY軸値に基づいて適宜に定めることのできる関数式であればよい。
そして、1区分mごとの輸送体積値V[m]を求めるに当たって、まず、当該1区分mにわたる被輸送物100の平均的な断面積A[m]を求め、この断面積A[m]に当該1区分m分のキャリア側ベルト14の走行距離(=N・ΔLp)を乗ずることで、当該輸送体積値V[m]を求めることとしたが、これに限らない。例えば、パルス信号Spが1パルス入力されるたびに、つまりキャリア側ベルト14が所定距離ΔLpだけ走行するたびに、当該所定距離ΔLp分の輸送体積値を求め、これを1区分mにわたって積算することで、当該1区分mごとの輸送体積値V[m]を求めてもよい。