JP2012103192A - 光波距離計 - Google Patents
光波距離計 Download PDFInfo
- Publication number
- JP2012103192A JP2012103192A JP2010253651A JP2010253651A JP2012103192A JP 2012103192 A JP2012103192 A JP 2012103192A JP 2010253651 A JP2010253651 A JP 2010253651A JP 2010253651 A JP2010253651 A JP 2010253651A JP 2012103192 A JP2012103192 A JP 2012103192A
- Authority
- JP
- Japan
- Prior art keywords
- distance measurement
- filter
- distance
- signal
- filter position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
【解決手段】測距光路23間に受光光量調節用の可変濃度フィルタ25が配置された位相差方式の光波距離計において、測定ごとに測距値、可変濃度フィルタ25のフィルタ位置、測距信号の信号棄却率を記憶手段51に記憶しておき、測定時には演算処理部50で、測距信号のサンプリングから算出したサンプル測距値と記憶手段51内の測距値とを比較して、差異が1m以下であるときは、その中で最も閉じられたフィルタ位置に可変濃度フィルタ25を設定し、さらに該フィルタ位置での信号棄却率が0%ならそのフィルタ位置のまま、棄却率が0%でないときはそのフィルタ位置よりも若干濃度を濃くして測距を開始するフィルタ位置調節手段を設けた。
フィルタ位置調節は数回で済み、最適なフィルタ位置に決まるので信号棄却率が下がり測距回数を減らせるため、結果的に測距時間が短縮できる。
【選択図】図4
Description
(i)光波距離計から目標反射物22までの距離が近い場合(近距離測距の場合)は、可変濃度フィルタ25は閉じる方向に制御される。
(ii)測距時の大気の揺らぎが大きいと、測距光路が曲げられ、測距光の測距信号が減衰し、可変濃度フィルタ25は大気の揺らぎが小さいときよりも開いた位置に決定される。
(iii)光波距離計から目標反射物22までの距離が遠い(遠距離測距)ほど、大気の揺らぎの影響を大きく受ける。
22 目標反射物
21、23 測距光路
25 可変濃度フィルタ
26 参照光路
30 受光素子(受光手段)
50 CPU(演算処理部)
51 記憶装置(記憶手段)
100 光送出手段
102 光路切換手段
Claims (2)
- 複数の変調周波数で変調された光を送出する光送出手段と、該光送出手段の光を測定地点に配置した目標反射物または参照光路のうち選択された一方に送出する光路切換手段と、
前記目標反射物で反射された測距光の測距光路間に配置され、連続的な濃度勾配を有する受光光量調整用の可変式受光濃度フィルタと、
前記測距光または前記参照光路を通過した参照光を受光して測距信号または参照信号を出力する受光手段と、
前記測距信号と参照信号の位相差によって目標反射物までの直線距離である測距値を算出する演算処理部と、を備えた光波距離計において
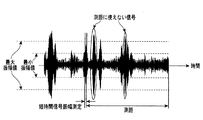
測距ごとに、少なくとも算出された測距値、前記可変濃度フィルタのフィルタ位置、及び受光光量が測距可能範囲を超えた前記測距信号のサンプル数と測距に用いるサンプル数との比を表す信号棄却率、の測定データを記憶する記憶手段を設け、
前記演算処理部に、
前記測距信号の少なくとも1周期分を含むサンプリングデータから短時間測距信号振幅およびサンプル測距値を算出する短時間測定手段と、
前記記憶手段に記憶されている過去の測距値を参照し、前記短時間測定手段で得られたサンプル測距値との差異が1m以下の測距値データが無いときは通常の測距を開始し、差異が1m以下の測距値データがあるときは、該測距値データの中から可変濃度フィルタが最も閉じられたフィルタ位置を参照し、該フィルタ位置に前記可変濃度フィルタを設定するとともに、該フィルタ位置での信号棄却率を前記記憶手段から参照し、該信号棄却率が0%であるときはそのフィルタ位置で測距を開始するが、該信号棄却率が0%でないときはそのフィルタ位置よりもフィルタ濃度を0超〜1%濃くして測距を開始するフィルタ位置調節手段と、
前記フィルタ位置調節手段による前記可変濃度フィルタの位置調整後に、測距を行い、その信号棄却率を算出する測距及び棄却率算出手段と、
前記測距及び棄却率算出手段後に、算出された測距値、前記フィルタ位置調節手段で得られた可変濃度フィルタのフィルタ位置、及び前記測距及び棄却率算出手段で算出された測距信号の信号棄却率、の測定データを前記記憶手段に格納させる測定データ記憶指示手段が設けられたことを特徴とする光波距離計。 - 前記演算処理部に、今回の測距値と前記記憶手段に記憶されている測距値の差異が1m以下のもの同士の可変濃度フィルタのフィルタ位置を比較して、その中で前記可変濃度フィルタが最も閉じられたフィルタ位置を有する測定データ以外を削除する記憶データ削除手段が設けられたことを特徴とする請求項1に記載の光波距離計。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253651A JP5610575B2 (ja) | 2010-11-12 | 2010-11-12 | 光波距離計 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253651A JP5610575B2 (ja) | 2010-11-12 | 2010-11-12 | 光波距離計 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012103192A true JP2012103192A (ja) | 2012-05-31 |
| JP2012103192A5 JP2012103192A5 (ja) | 2014-05-29 |
| JP5610575B2 JP5610575B2 (ja) | 2014-10-22 |
Family
ID=46393756
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010253651A Expired - Fee Related JP5610575B2 (ja) | 2010-11-12 | 2010-11-12 | 光波距離計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5610575B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019174228A (ja) * | 2018-03-28 | 2019-10-10 | 株式会社トプコン | 光波距離計および測量装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04350584A (ja) * | 1991-05-28 | 1992-12-04 | Sokkia Co Ltd | 光波距離計 |
| JPH0798373A (ja) * | 1993-09-28 | 1995-04-11 | Nec Corp | レーザーレーダー装置 |
| JPH08262138A (ja) * | 1995-03-24 | 1996-10-11 | Asahi Optical Co Ltd | 光波測距装置および光波測距装置における光量制御方法 |
| JPH09236662A (ja) * | 1996-02-29 | 1997-09-09 | Ushikata Shokai:Kk | 光波距離計 |
| JPH11230740A (ja) * | 1998-02-12 | 1999-08-27 | Topcon Corp | 距離測定装置 |
| JP2001349943A (ja) * | 2000-06-06 | 2001-12-21 | Hitachi Ltd | レーザ測距装置、レーザ測距方法及び計測装置 |
| JP2003255046A (ja) * | 2002-03-04 | 2003-09-10 | Nikon Geotecs Co Ltd | 距離測定装置および距離測定方法 |
| JP2008209162A (ja) * | 2007-02-23 | 2008-09-11 | Matsushita Electric Works Ltd | 距離画像センサ |
| JP2010107212A (ja) * | 2008-10-28 | 2010-05-13 | Panasonic Electric Works Co Ltd | 距離測定装置 |
-
2010
- 2010-11-12 JP JP2010253651A patent/JP5610575B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04350584A (ja) * | 1991-05-28 | 1992-12-04 | Sokkia Co Ltd | 光波距離計 |
| JPH0798373A (ja) * | 1993-09-28 | 1995-04-11 | Nec Corp | レーザーレーダー装置 |
| JPH08262138A (ja) * | 1995-03-24 | 1996-10-11 | Asahi Optical Co Ltd | 光波測距装置および光波測距装置における光量制御方法 |
| JPH09236662A (ja) * | 1996-02-29 | 1997-09-09 | Ushikata Shokai:Kk | 光波距離計 |
| JPH11230740A (ja) * | 1998-02-12 | 1999-08-27 | Topcon Corp | 距離測定装置 |
| JP2001349943A (ja) * | 2000-06-06 | 2001-12-21 | Hitachi Ltd | レーザ測距装置、レーザ測距方法及び計測装置 |
| JP2003255046A (ja) * | 2002-03-04 | 2003-09-10 | Nikon Geotecs Co Ltd | 距離測定装置および距離測定方法 |
| JP2008209162A (ja) * | 2007-02-23 | 2008-09-11 | Matsushita Electric Works Ltd | 距離画像センサ |
| JP2010107212A (ja) * | 2008-10-28 | 2010-05-13 | Panasonic Electric Works Co Ltd | 距離測定装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019174228A (ja) * | 2018-03-28 | 2019-10-10 | 株式会社トプコン | 光波距離計および測量装置 |
| JP7082892B2 (ja) | 2018-03-28 | 2022-06-09 | 株式会社トプコン | 光波距離計および測量装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5610575B2 (ja) | 2014-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4828167B2 (ja) | 距離測定装置及びその方法 | |
| JP5178761B2 (ja) | Fmcw信号生成回路及びレーダー装置 | |
| CN114594070A (zh) | 一种基于tdlas的宽域气体浓度检测装置及方法 | |
| US7339655B2 (en) | Electric optical distance wavelength meter | |
| CN103178437B (zh) | 一种智能化激光锁定装置及锁定方法 | |
| CN102265178A (zh) | 距离测定装置及距离测定方法 | |
| US4639129A (en) | Method of measuring distance between two observation points | |
| JP5610575B2 (ja) | 光波距離計 | |
| JP2018044853A (ja) | レーザ射出装置、制御方法及びプログラム | |
| US20040051926A1 (en) | Photoelectronic mixing device (pmd) system | |
| JP5670829B2 (ja) | 光波距離計 | |
| JP5665286B2 (ja) | 光波距離計 | |
| KR20150045124A (ko) | 위상 잡음 최적화 장치 및 방법 | |
| CN101877616B (zh) | 对光通信中的偏振模色散进行补偿的方法及装置 | |
| JPWO2019058482A1 (ja) | 光計測装置及び方法、コンピュータプログラム並びに記録媒体 | |
| CN111638402A (zh) | 测量微波电场中微波信号的频率的方法及系统 | |
| JP2023142441A (ja) | 光波距離計 | |
| CN114578297B (zh) | 线性扫频控制方法、线性扫频控制装置及雷达 | |
| JP4002199B2 (ja) | 光波距離計 | |
| JP6213568B2 (ja) | 生体情報計測装置 | |
| JP5730094B2 (ja) | 光波距離計 | |
| JP2006329797A (ja) | 光波距離計 | |
| JP7082892B2 (ja) | 光波距離計および測量装置 | |
| RU2610514C2 (ru) | Лазерный фазовый дальномер | |
| RU2312368C2 (ru) | Способ измерения добротности резонатора |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130905 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140411 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5610575 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |