JP2012104100A - 無線通信を利用した周辺車両感知システム及びその方法 - Google Patents
無線通信を利用した周辺車両感知システム及びその方法 Download PDFInfo
- Publication number
- JP2012104100A JP2012104100A JP2011150751A JP2011150751A JP2012104100A JP 2012104100 A JP2012104100 A JP 2012104100A JP 2011150751 A JP2011150751 A JP 2011150751A JP 2011150751 A JP2011150751 A JP 2011150751A JP 2012104100 A JP2012104100 A JP 2012104100A
- Authority
- JP
- Japan
- Prior art keywords
- surrounding vehicle
- vehicle
- surrounding
- distance
- wireless signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 43
- 238000004891 communication Methods 0.000 title claims abstract description 40
- 238000001514 detection method Methods 0.000 title claims abstract description 22
- 230000002093 peripheral effect Effects 0.000 title claims abstract description 22
- 230000005540 biological transmission Effects 0.000 claims description 18
- 230000008054 signal transmission Effects 0.000 claims description 17
- 238000005516 engineering process Methods 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- 238000009434 installation Methods 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0247—Determining attitude
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【解決手段】 本発明に係る無線通信を利用した周辺車両感知システムは、無線信号を発生させる複数個の無線信号発信部と、周辺車両から発生した無線信号を受信する複数個の無線信号受信部と、受信された無線信号の強度に応じて周辺車両との距離を算出する周辺車両距離算出部と、前記複数個の無線信号受信部の間の距離と前記算出された周辺車両との距離を利用し、前記周辺車両の位置を推定する周辺車両位置推定部と、前記周辺車両の位置を利用して前記周辺車両の時間当り移動距離から前記周辺車両の走行速度を推定する周辺車両走行速度推定部と、前記周辺車両の位置を利用して前記周辺車両の走行方向を推定する周辺車両走行方向推定部とを含むことを特徴とする。
【選択図】図1
Description
このような死角地帯の視野を確保するため、運転者は自分の趣向に従い補助ミラーを用いることもあるが、これもまた完全な解決策ではなく、別の補助ミラーをみるためにユーザーの視野が分散される問題点がある。
しかし、このような技術は、主に車両駐車の際に前進及び後進のための視野確保用に用いられるだけで、走行中には特別な機能を提供することができず、特に左右の死角地帯に対する視野を提供することができない問題点がある。
さらに、車両の走行中には周辺車両に対する位置、又は距離を確認する必要があり、車線を変更する場合、左右車線の走行車両有無を含む周辺車両の状態を正確に確認できない場合、ちょっと間違えば事故を誘発する恐れがあった。
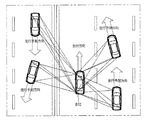
図1は、本発明の実施形態に係る無線通信を利用した周辺車両感知システムの構成を示す図である。
本発明の実施形態に係る無線通信を利用した周辺車両感知システムは、無線信号発信部100、無線信号受信部200、周辺車両距離算出部300、周辺車両位置推定部400、周辺車両走行速度推定部500、周辺車両走行方向推定部600、表示部700及び衝突危険度算出部900を含む。
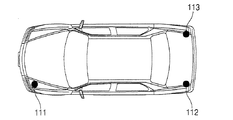
無線信号受信部200は、周辺車両から発信された無線信号を受信する。このとき、無線信号受信部200は図3に示す通り、車両の左側前輪の上端211及び左側後輪の上端212にそれぞれ設けられる。このとき、無線信号受信部200の設置位置は変更される。このとき、無線信号発信部100と無線信号受信部200との間に予め定められたプロトコルを有する信号を送受信するのが好ましい。
このとき、無線信号の強度を測定して距離を算出する技術であるRSSI(Received Signal Strength Indication)は、無線信号の強度に応じて信号を0〜255の1バイト値と表現し、強度に応じる信号値に従い発信地からの距離を判断することができる。
周辺車両走行速度推定部500は、周辺車両位置推定部400から推定された位置を利用して一定時間の間、当該車両の移動距離及び移動時間を利用して走行速度を推定する。
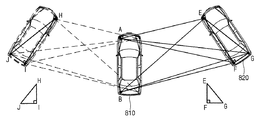
周辺車両走行方向推定部600は、周辺車両位置推定部400から発信地の位置を利用して図6に示す通り、直角三角形を作ったとき、直角三角形の直角の左側の頂点方向(E)を車両が走行する方向と判断する。
衝突危険度算出部900は、周辺車両の位置、走行速度及び走行方向を利用して周辺車両との危険度(近接可能性、制動余裕距離)を算出し、各車両別危険度を相対的に判断する。
先ず、車両の周辺車両距離算出部300は、走行中に無線信号が受信されたかを判断し(S101)、無線信号が受信されると周辺車両距離算出部300が受信された各無線信号の強度を測定し、無線信号の発信地との相対的な距離を算出する(S102)。
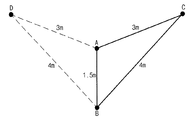
ここで、周辺車両位置推定部400は、無線信号受信部211、212の位置と算出された距離を利用し、図6に示す通り発信地の位置を算出し(S103)、複数の発信地相互を線で繋いで直角三角形(EFG、HJI)を形成する(S104)。
その後、周辺車両走行速度推定部500は、一定時間の間当該車両の移動距離及び移動時間を利用して走行速度を推定し、三角形の直角の左側の頂点(E)方向に沿って車両の走行方向を予測する(S106)。
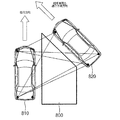
このように、本願発明の送受信された無線信号の強度に応じて周辺車両を感知する技術は、図7に示す通り、自車810と周辺車両820の間に障害物(800)が存在しても無線信号の送受信が可能なので感知が可能であるため、周辺車両感知効率を高めることができる。
先ず、無線通信を利用した周辺車両感知システムは、図4に示す通り、無線通信を利用して周辺車両の位置、走行方向及び走行速度を推定した後(S201)、衝突危険度算出部900は自車の走行方向と走行速度に基づいて周辺車両の位置、走行方向及び走行速度を考慮して1次衝突危険性のある周辺車両との近接可能性を判断する(S202)。即ち、図9に示す通り、自車811と1次衝突危険性のある周辺車両813の走行方向及び走行速度を考慮し、自車811と1次衝突危険性のある周辺車両813が衝突する時点を計算し、10m後にK地点で1m以内に近接することが推定できる。
一方、衝突危険度算出部900は、1次衝突危険性のある周辺車両813との衝突を避けるため制動、又は操向回避の際の車両との2次衝突危険度を判断する(S204)。図9に示す通り、自車811が1次衝突危険性のある周辺車両813との衝突を避けるため制動を施行する場合、衝突危険度算出部900は後から走行していた車両814と2次衝突危険性が発生し、2次衝突危険性のある周辺車両814との近接可能性及び制動余裕距離を算出する。即ち、2次衝突危険性のある周辺車両814が、自車811が制動して止める時点(L地点)まで走行する場合、近接可能性は1m以内であり、制動余裕距離は10mとなる。
例えば、1次衝突危険性のある周辺車両813の危険度を70%、2次衝突危険性のある周辺車両814の危険度を50%と評価することができる。
さらに、矢印の色に従い周辺車両の危険度を示すことができる。例えば、矢印の色が赤色であれば危険度が90%以上、矢印の色が橙色であれば危険度が50%〜89%間であり、緑色であれば危険度が50%未満のものと区分することができ、危険度に伴う色表示はさらに細分化させることができる。このとき、矢印の幅で危険度、又は走行速度を表示することもできる。さらに、危険度を数字で表示することもできる。
200、211、212、213:無線信号受信部
300:周辺車両距離算出部
400:周辺車両位置推定部
500:周辺車両走行速度推定部
600:周辺車両走行方向推定部
700:表示部
800:障害物
811、810:自車
813、814、820:周辺車両
900:衝突危険度算出部
Claims (19)
- 無線信号を発生させる複数個の無線信号発信部と、
周辺車両から発生した無線信号を受信する複数個の無線信号受信部と、
受信された無線信号の強度に応じて、周辺車両との距離を算出する周辺車両距離算出部と、
前記複数個の無線信号受信部の間の距離と、前記算出された周辺車両との距離を利用して前記周辺車両の位置を推定する周辺車両位置推定部と、
前記周辺車両の位置を利用し、前記周辺車両の時間当り移動距離から前記周辺車両の走行速度を推定する周辺車両走行速度推定部と、
前記周辺車両の位置を利用し、前記周辺車両の走行方向を推定する周辺車両走行方向推定部と
を含むことを特徴とする無線通信を利用した周辺車両感知システム。 - 前記周辺車両位置推定部は、前記無線信号受信部の間の距離と前記算出された周辺車両との距離を利用し、2つの無線信号受信部からそれぞれ線を引いて交差する地点を、前記周辺車両の無線信号発信部の位置と判断することを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記周辺車両位置推定部は、各無線信号発信部を連結して三角形を形成した後、前記三角形の態様により無線信号を発信した実際発信地を判別することを特徴とする請求項2記載の無線通信を利用した周辺車両感知システム。
- 前記周辺車両走行方向推定部は、前記複数個の無線信号発信部のうち一つの位置に沿って、前記周辺車両の走行方向を推定することを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記周辺車両走行速度推定部は、前記周辺車両の位置を利用して時間当り移動距離に従い走行速度を推定することを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 自車と前記周辺車両を画面に表示し、前記周辺車両の走行方向を表示することを特徴とする表示部をさらに含むことを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記無線信号発生部は、複数個がそれぞれ備えられて前記複数個の無線信号発生部相互を連結すれば、直角三角形を成すことを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記無線信号受信部は、複数個が備えられて前記複数個の無線信号受信部と前記無線信号発信部を線で連結すれば、三角形を成すことを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記周辺車両の位置、前記周辺車両の走行方向、前記周辺車両の走行速度を利用し、前記周辺車両との危険度を算出する衝突危険度算出部をさらに含むことを特徴とする請求項1記載の無線通信を利用した周辺車両感知システム。
- 前記衝突危険度算出部は、1次衝突危険性のある周辺車両に対する近接可能性及び制動余裕距離を利用して危険度を換算し、2次衝突危険性のある周辺車両に対する近接可能性及び制動余裕距離を利用し、前記1次衝突危険性のある周辺車両に対して相対的な危険度を換算することを特徴とする請求項9記載の無線通信を利用した周辺車両感知システム。
- 周辺車両から無線信号が受信されると、前記無線信号の強度に応じて前記無線信号の発信地点との距離を算出する過程と、
前記無線信号の発信地点との距離及び前記無線信号受信部間の距離を利用し、前記無線信号発信地点の位置を算出して前記周辺車両の位置を推定する過程と、
前記周辺車両の位置から周辺車両の走行速度及び走行方向を推定する過程と
を含むことを特徴とする無線通信を利用した周辺車両感知方法。 - 前記周辺車両の位置を推定する過程は、前記無線信号発信地点が複数個である場合、複数個の発信地点を線で連結して三角形を形成し、前記三角形の態様に従い実際発信地を区別した後、自車に基づいて実際発信地に対する位置を推定することを特徴とする請求項11記載の無線通信を利用した周辺車両感知方法。
- 前記周辺車両の走行速度及び走行方向を推定する過程は、前記複数個の無線信号発信地点のうち一つの位置に沿って前記周辺車両の走行方向を推定することを特徴とする請求項12記載の無線通信を利用した周辺車両感知方法。
- 前記周辺車両の走行速度及び走行方向を推定する過程は、前記周辺車両の位置を利用して時間当り移動距離に従い走行速度を推定することを特徴とする請求項11記載の無線通信を利用した周辺車両感知方法。
- 前記周辺車両の位置、前記周辺車両の走行速度及び前記周辺車両の走行方向を利用し、1次衝突危険性のある周辺車両との近接可能性及び制動余裕距離を算出する過程をさらに含むことを特徴とする請求項11記載の無線通信を利用した周辺車両感知方法。
- 前記1次衝突危険性を回避するための制動又は操向回避の際、2次衝突危険性のある車両との近接可能性及び制動余裕距離を算出する過程をさらに含むことを特徴とする請求項15記載の無線通信を利用した周辺車両感知方法。
- 前記1次衝突危険性のある周辺車両に対する近接可能性及び制動余裕距離を利用して危険度を換算する過程と、
前記2次衝突危険性のある周辺車両に対する近接可能性及び制動余裕距離を利用し、前記1次衝突危険性のある周辺車両に対して相対的な危険度を換算する過程と
をさらに含むことを特徴とする請求項15記載の無線通信を利用した周辺車両感知方法。 - 前記周辺車両別危険度、走行方向及び走行速度を画面に表示する過程をさらに含むことを特徴とする請求項15記載の無線通信を利用した周辺車両感知方法。
- 前記周辺車両別危険度、走行方向及び走行速度を矢印の長さ、色、広さなどで区別して表示することを特徴とする請求項18記載の無線通信を利用した周辺車両感知方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100111736A KR101592598B1 (ko) | 2010-11-10 | 2010-11-10 | 무선통신을 이용한 주변차량 충돌 예측 방법 |
| KR1020100111738A KR101251733B1 (ko) | 2010-11-10 | 2010-11-10 | 무선통신을 이용한 주변 차량 감지 시스템 및 그 방법 |
| KR10-2010-0111738 | 2010-11-10 | ||
| KR10-2010-0111736 | 2010-11-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012104100A true JP2012104100A (ja) | 2012-05-31 |
| JP5898869B2 JP5898869B2 (ja) | 2016-04-06 |
Family
ID=46019085
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011150751A Active JP5898869B2 (ja) | 2010-11-10 | 2011-07-07 | 無線通信を利用した周辺車両感知システム及びその方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8604918B2 (ja) |
| JP (1) | JP5898869B2 (ja) |
| CN (2) | CN102466792B (ja) |
| DE (1) | DE102011079100A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016012277A (ja) * | 2014-06-30 | 2016-01-21 | 株式会社リコー | 車両用通信装置、通信システム |
| CN106627570A (zh) * | 2016-10-21 | 2017-05-10 | 璧典寒 | 汽车行驶安全提示方法及汽车行驶安全提示系统 |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10117078B1 (en) | 2005-04-12 | 2018-10-30 | Ehud Mendelson | Medical information communication method |
| US9595195B2 (en) | 2012-09-06 | 2017-03-14 | Apple Inc. | Wireless vehicle system for enhancing situational awareness |
| US9344989B2 (en) | 2012-09-06 | 2016-05-17 | Apple Inc. | System with wireless messages to enhance location accuracy |
| US9633565B2 (en) * | 2012-11-15 | 2017-04-25 | GM Global Technology Operations LLC | Active safety system and method for operating the same |
| CN104062647A (zh) * | 2013-11-22 | 2014-09-24 | 苏州天趣信息科技有限公司 | 一种侦测无线讯号的装置 |
| JPWO2015146083A1 (ja) * | 2014-03-28 | 2017-04-13 | 日本電気株式会社 | 情報収集装置、情報収集方法、及び、プログラム |
| US10127813B2 (en) | 2015-01-20 | 2018-11-13 | Invent F&W, Llc | Systems and methods for alerting drivers of approaching emergency vehicles |
| US10789560B2 (en) * | 2015-03-31 | 2020-09-29 | TAC Insight, LLC | System for tracking hauling operations |
| GB2558145B (en) * | 2015-10-16 | 2021-07-14 | Ford Global Tech Llc | System and method for pseudo-navigation assistance in a vehicle |
| US20170337819A1 (en) | 2016-05-19 | 2017-11-23 | Delphi Technologies, Inc. | Safe-to-proceed system for an automated vehicle |
| US11092446B2 (en) | 2016-06-14 | 2021-08-17 | Motional Ad Llc | Route planning for an autonomous vehicle |
| US10126136B2 (en) | 2016-06-14 | 2018-11-13 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US10309792B2 (en) | 2016-06-14 | 2019-06-04 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| CN106443576A (zh) * | 2016-08-30 | 2017-02-22 | 上汽通用汽车有限公司 | 一种车辆定位方法、装置和系统 |
| US10331129B2 (en) | 2016-10-20 | 2019-06-25 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10857994B2 (en) | 2016-10-20 | 2020-12-08 | Motional Ad Llc | Identifying a stopping place for an autonomous vehicle |
| US10473470B2 (en) | 2016-10-20 | 2019-11-12 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10681513B2 (en) | 2016-10-20 | 2020-06-09 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10095238B2 (en) * | 2016-12-14 | 2018-10-09 | Ford Global Technologies, Llc | Autonomous vehicle object detection |
| CN106960588B (zh) * | 2017-03-24 | 2019-08-06 | 奇瑞汽车股份有限公司 | 基于专用短程通信的车辆姿态确定方法及装置 |
| KR102018554B1 (ko) * | 2018-01-18 | 2019-09-05 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| FR3083636B1 (fr) * | 2018-07-06 | 2020-06-12 | Continental Automotive France | Procede de detection d'un vehicule automobile par un autre vehicule avec echange de signaux radio uhf |
| EP3644016B1 (en) * | 2018-10-23 | 2024-07-31 | Zenuity AB | Localization using dynamic landmarks |
| US11079593B2 (en) * | 2018-11-26 | 2021-08-03 | International Business Machines Corporation | Heads up display system |
| CN111385868A (zh) * | 2018-12-29 | 2020-07-07 | 北京骑胜科技有限公司 | 一种车辆定位方法、系统、装置和存储介质 |
| WO2021018385A1 (en) * | 2019-07-30 | 2021-02-04 | Telefonaktiebolaget Lm Ericsson (Publ) | Technique for determining a relative position between vehicles |
| CN113064116B (zh) | 2020-01-02 | 2024-01-30 | 京东方科技集团股份有限公司 | 车辆定位方法及装置、以及汽车 |
| DE102020213723A1 (de) | 2020-11-02 | 2022-05-05 | Volkswagen Aktiengesellschaft | Verfahren, Computerprogramm und Vorrichtung zum Bestimmen einer Pose eines Verkehrsteilnehmers |
| CN112820131B (zh) * | 2020-12-31 | 2021-10-26 | 山东派蒙机电技术有限公司 | 基于uwb进行环境感知数据共享的目标车辆筛选方法、装置及设备 |
| CN115604297B (zh) * | 2021-06-28 | 2024-12-10 | 比亚迪股份有限公司 | 一种指令交互装置以及车辆 |
| US11451955B2 (en) * | 2021-09-01 | 2022-09-20 | Autonomous Roadway Intelligence, Llc | V2X and vehicle localization by local map exchange in 5G or 6G |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765294A (ja) * | 1993-08-23 | 1995-03-10 | Mitsubishi Electric Corp | 車両用予防安全装置 |
| JP2001236599A (ja) * | 2000-02-23 | 2001-08-31 | Toyota Motor Corp | 移動体接近状況判別装置、携帯電話端末、移動体動作制御装置、電波発信装置及び移動体接近状況判別方法 |
| JP2004062874A (ja) * | 2002-06-07 | 2004-02-26 | Mitsubishi Electric Corp | 通信装置、準天頂衛星、保険料割引サービスシステム及び、課金システム |
| JP2004284494A (ja) * | 2003-03-24 | 2004-10-14 | Clarion Co Ltd | 位置検出装置、駐車支援システム、車載端末、車載端末の制御方法、サーバコンピュータおよびサーバコンピュータの制御方法 |
| JP2006023906A (ja) * | 2004-07-07 | 2006-01-26 | Nissan Motor Co Ltd | 障害物検出装置、車両 |
| JP2007072809A (ja) * | 2005-09-07 | 2007-03-22 | Toyota Central Res & Dev Lab Inc | 交通シミュレーション装置、方法及びプログラム |
| JP2012242181A (ja) * | 2011-05-17 | 2012-12-10 | Foundation For The Promotion Of Industrial Science | 検出装置及び方法 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5302956A (en) | 1992-08-14 | 1994-04-12 | Vorad Safety Systems, Inc. | Multi-frequency, multi-target vehicular radar system using digital signal processing |
| KR20000074067A (ko) | 1999-05-18 | 2000-12-05 | 조영송 | 지령신호 무선 송수신장치 |
| US7382274B1 (en) | 2000-01-21 | 2008-06-03 | Agere Systems Inc. | Vehicle interaction communication system |
| KR100519206B1 (ko) | 2002-10-02 | 2005-10-05 | 주식회사 백금정보통신 | 레이더 검출기와 전자식 나침반이 결합된 위험정보 송수신 시스템 |
| EP1772322A3 (en) | 2003-07-11 | 2007-05-16 | Toyota Jidosha Kabushiki Kaisha | Crash-safe vehicle control system |
| JP2006025028A (ja) | 2004-07-06 | 2006-01-26 | Nissan Motor Co Ltd | 車両間通信装置 |
| US8041469B2 (en) * | 2005-01-05 | 2011-10-18 | GM Global Technology Operations LLC | Determining relative spatial information between vehicles |
| US7525447B2 (en) * | 2005-01-24 | 2009-04-28 | Galindo Rex K | Emergency vehicle alert system |
| CN1885365B (zh) * | 2005-06-24 | 2010-05-12 | 龚立新 | 车辆通讯装置、路边通讯装置和系统及其通讯联络的方法 |
| US7330103B2 (en) * | 2005-07-21 | 2008-02-12 | International Business Machines Corporation | Vehicle collision avoidance system enhancement using in-car air bag deployment system |
| US7729857B2 (en) * | 2005-08-18 | 2010-06-01 | Gm Global Technology Operations, Inc. | System for and method of detecting a collision and predicting a vehicle path |
| US7382272B2 (en) * | 2005-10-19 | 2008-06-03 | Schweitzer Engineering Laboratories, Inc. | System, a tool and method for communicating with a faulted circuit indicator using a remote display |
| KR101174443B1 (ko) | 2005-10-19 | 2012-08-16 | 엘지전자 주식회사 | 위치파악장치 |
| JP2009003822A (ja) | 2007-06-25 | 2009-01-08 | Hitachi Ltd | 車車間通信装置 |
| US7592945B2 (en) * | 2007-06-27 | 2009-09-22 | Gm Global Technology Operations, Inc. | Method of estimating target elevation utilizing radar data fusion |
| JP4844548B2 (ja) | 2007-12-03 | 2011-12-28 | 株式会社デンソー | 運転支援装置 |
| KR100954232B1 (ko) | 2007-12-13 | 2010-04-21 | 한국전자통신연구원 | 차량 충돌 회피 방법 및 시스템 |
| JP4989448B2 (ja) | 2007-12-25 | 2012-08-01 | トヨタ自動車株式会社 | 近傍車両監視装置 |
| JP2009199267A (ja) | 2008-02-20 | 2009-09-03 | Toyota Motor Corp | 走行制御装置 |
| US20110217990A1 (en) * | 2008-11-21 | 2011-09-08 | Hideaki Tetsuhashi | Mobile communication terminal, base station, warning system and method for controlling mobile communication terminal |
| JP5412861B2 (ja) | 2009-02-06 | 2014-02-12 | トヨタ自動車株式会社 | 運転支援装置 |
| CN201560802U (zh) * | 2009-06-29 | 2010-08-25 | 北京中矿华沃电子科技有限公司 | 露天矿采场人车防撞预警系统 |
-
2011
- 2011-06-29 US US13/172,237 patent/US8604918B2/en not_active Expired - Fee Related
- 2011-07-07 JP JP2011150751A patent/JP5898869B2/ja active Active
- 2011-07-13 DE DE102011079100.0A patent/DE102011079100A1/de not_active Withdrawn
- 2011-07-29 CN CN201110221778.1A patent/CN102466792B/zh active Active
- 2011-07-29 CN CN201510511749.7A patent/CN105118328B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765294A (ja) * | 1993-08-23 | 1995-03-10 | Mitsubishi Electric Corp | 車両用予防安全装置 |
| JP2001236599A (ja) * | 2000-02-23 | 2001-08-31 | Toyota Motor Corp | 移動体接近状況判別装置、携帯電話端末、移動体動作制御装置、電波発信装置及び移動体接近状況判別方法 |
| JP2004062874A (ja) * | 2002-06-07 | 2004-02-26 | Mitsubishi Electric Corp | 通信装置、準天頂衛星、保険料割引サービスシステム及び、課金システム |
| JP2004284494A (ja) * | 2003-03-24 | 2004-10-14 | Clarion Co Ltd | 位置検出装置、駐車支援システム、車載端末、車載端末の制御方法、サーバコンピュータおよびサーバコンピュータの制御方法 |
| JP2006023906A (ja) * | 2004-07-07 | 2006-01-26 | Nissan Motor Co Ltd | 障害物検出装置、車両 |
| JP2007072809A (ja) * | 2005-09-07 | 2007-03-22 | Toyota Central Res & Dev Lab Inc | 交通シミュレーション装置、方法及びプログラム |
| JP2012242181A (ja) * | 2011-05-17 | 2012-12-10 | Foundation For The Promotion Of Industrial Science | 検出装置及び方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016012277A (ja) * | 2014-06-30 | 2016-01-21 | 株式会社リコー | 車両用通信装置、通信システム |
| CN106627570A (zh) * | 2016-10-21 | 2017-05-10 | 璧典寒 | 汽车行驶安全提示方法及汽车行驶安全提示系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102466792A (zh) | 2012-05-23 |
| US8604918B2 (en) | 2013-12-10 |
| DE102011079100A1 (de) | 2015-08-13 |
| CN105118328B (zh) | 2018-03-16 |
| US20120112895A1 (en) | 2012-05-10 |
| CN105118328A (zh) | 2015-12-02 |
| JP5898869B2 (ja) | 2016-04-06 |
| CN102466792B (zh) | 2015-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5898869B2 (ja) | 無線通信を利用した周辺車両感知システム及びその方法 | |
| EP3339999B1 (en) | Information processing apparatus, information processing method, and recording medium storing programm | |
| CN102044170B (zh) | 车辆的驾驶辅助控制装置 | |
| EP2487454B1 (en) | Vehicle length estimation | |
| KR101430960B1 (ko) | 차량 간 통신을 통한 주변 차량 감지 장치 및 방법 | |
| JP2018195289A (ja) | 車両システム、車両情報処理方法、プログラム、交通システム、インフラシステムおよびインフラ情報処理方法 | |
| JP2021060773A (ja) | 渋滞情報システム | |
| KR101300534B1 (ko) | 무선레이더를 이용한 차간거리표시 및 차량추돌위험경보방법 및 이를 이용한 장치 | |
| CN110962744A (zh) | 车辆盲区检测方法和车辆盲区检测系统 | |
| CN204055561U (zh) | 车辆安全行驶警示系统 | |
| CN104192063B (zh) | 车辆安全行驶警示系统及相应的警示方法 | |
| KR101592598B1 (ko) | 무선통신을 이용한 주변차량 충돌 예측 방법 | |
| JP2007310457A (ja) | 車車間通信システム、車車間通信装置、および制御装置 | |
| KR20230007992A (ko) | 차량을 위한 동적으로 로컬화된 센서 | |
| JP2021525367A (ja) | 車両パラメータを求めるための方法および装置 | |
| JP2011240852A (ja) | 衝突被害軽減装置、及びその方法 | |
| GB2624479A (en) | Method and system for reverse parking an autonomous vehicle | |
| JP6031956B2 (ja) | 通信装置 | |
| JP5496060B2 (ja) | 車両用無線通信システム | |
| KR20200084955A (ko) | 차량 및 그 제어방법 | |
| JP2013033505A (ja) | 車載装置及び中継装置 | |
| KR101328171B1 (ko) | 차량 안전 서비스 제공 시스템 및 방법 | |
| KR101251733B1 (ko) | 무선통신을 이용한 주변 차량 감지 시스템 및 그 방법 | |
| KR20210041770A (ko) | 스마트 모빌리티 감지 레이다 | |
| JP6032059B2 (ja) | 車載機及び運転支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140618 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150602 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160216 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160307 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5898869 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |