JP2012105158A - 連結車両用鳥瞰図表示システム - Google Patents
連結車両用鳥瞰図表示システム Download PDFInfo
- Publication number
- JP2012105158A JP2012105158A JP2010253242A JP2010253242A JP2012105158A JP 2012105158 A JP2012105158 A JP 2012105158A JP 2010253242 A JP2010253242 A JP 2010253242A JP 2010253242 A JP2010253242 A JP 2010253242A JP 2012105158 A JP2012105158 A JP 2012105158A
- Authority
- JP
- Japan
- Prior art keywords
- bird
- image
- trailer
- tractor
- eye
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 34
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 19
- 238000006243 chemical reaction Methods 0.000 claims abstract description 19
- 238000003786 synthesis reaction Methods 0.000 claims abstract description 19
- 230000002194 synthesizing effect Effects 0.000 claims abstract description 8
- 238000001514 detection method Methods 0.000 claims abstract description 5
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 292
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 263
- 238000003702 image correction Methods 0.000 description 12
- 241000905137 Veronica schmidtiana Species 0.000 description 10
- 238000013500 data storage Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 238000000034 method Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000012937 correction Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
Images


Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Abstract
【課題】連結車両周辺を上方から見たような鳥瞰図を表示できるようにする。
【解決手段】トラクタ2の周辺を撮像するトラクタカメラと、トレーラ3の周辺を撮像するトレーラカメラと、トラクタ2とトレーラ3との連結部10の相対角度を検出する相対角度検出手段33と、トラクタカメラが撮像したトラクタ周辺のトラクタ周辺撮像画像を、上方から鳥瞰した画像に変換してトラクタ周辺鳥瞰画像を得ると共に、トレーラカメラが撮像したトレーラ周辺のトレーラ周辺撮像画像を、上方から鳥瞰した画像に変換してトレーラ周辺鳥瞰画像を得る鳥瞰画像変換手段34と、トラクタ周辺鳥瞰画像とトレーラ周辺鳥瞰画像とを合成して、連結車両周辺の鳥瞰画像を生成する鳥瞰画像合成手段36とを備え、鳥瞰画像合成手段36は、トラクタ2とトレーラ3との相対角度に応じて、トラクタ周辺鳥瞰画像とトレーラ周辺鳥瞰画像とを合成するように構成する。
【選択図】図1
【解決手段】トラクタ2の周辺を撮像するトラクタカメラと、トレーラ3の周辺を撮像するトレーラカメラと、トラクタ2とトレーラ3との連結部10の相対角度を検出する相対角度検出手段33と、トラクタカメラが撮像したトラクタ周辺のトラクタ周辺撮像画像を、上方から鳥瞰した画像に変換してトラクタ周辺鳥瞰画像を得ると共に、トレーラカメラが撮像したトレーラ周辺のトレーラ周辺撮像画像を、上方から鳥瞰した画像に変換してトレーラ周辺鳥瞰画像を得る鳥瞰画像変換手段34と、トラクタ周辺鳥瞰画像とトレーラ周辺鳥瞰画像とを合成して、連結車両周辺の鳥瞰画像を生成する鳥瞰画像合成手段36とを備え、鳥瞰画像合成手段36は、トラクタ2とトレーラ3との相対角度に応じて、トラクタ周辺鳥瞰画像とトレーラ周辺鳥瞰画像とを合成するように構成する。
【選択図】図1
Description
本発明は、連結車両周辺を上方から見たような鳥瞰図を表示する、連結車両用鳥瞰図表示システムに関するものである。
従来より、車両に複数のカメラを設置し、複数のカメラから得られた画像を車両の全周を表示する画像に変換して、表示する装置が開発されている。
例えば、特許文献1には、トラクタとトレーラからなる連結車両の技術として、トラクタとトレーラからなる連結車両のトレーラ側にカメラを設置し、このカメラがトレーラの後方を撮影する運転支援システムが開示されている。この運転支援システムは、各撮影画像を路面に平行な鳥瞰図座標上に投影することによって各撮影画像を鳥瞰画像に変換する一方で、複数の撮影画像から成る動画像のオプティカルフローを鳥瞰図座標上で導出する。このオプティカルフローとトラクタの移動上方からトラクタとトレーラの連結角を推定し、更に、連結角とトラクタの移動情報からトレーラの移動予測軌跡を導出する。そして、この移動予測軌跡を鳥瞰画像に重量した画像を表示装置に出力する。この画像表示により、トラクタが動いた場合にトレーラがどのように動くのかを把握しやすくなる。
例えば、特許文献1には、トラクタとトレーラからなる連結車両の技術として、トラクタとトレーラからなる連結車両のトレーラ側にカメラを設置し、このカメラがトレーラの後方を撮影する運転支援システムが開示されている。この運転支援システムは、各撮影画像を路面に平行な鳥瞰図座標上に投影することによって各撮影画像を鳥瞰画像に変換する一方で、複数の撮影画像から成る動画像のオプティカルフローを鳥瞰図座標上で導出する。このオプティカルフローとトラクタの移動上方からトラクタとトレーラの連結角を推定し、更に、連結角とトラクタの移動情報からトレーラの移動予測軌跡を導出する。そして、この移動予測軌跡を鳥瞰画像に重量した画像を表示装置に出力する。この画像表示により、トラクタが動いた場合にトレーラがどのように動くのかを把握しやすくなる。
ところで、連結車両のような大型車両は内輪差が大きくなるため、ドライバは左右折の際の巻き込みを防止するためなど、車両の周辺状況を把握しながら注意を払う必要がある。特に、連結車両の場合、トラクタとトレーラとの相対角度(連結角)が変化するので、車両の周辺状況を把握することが難しくなる。
しかしながら、特許文献1に開示された技術は、トレーラに設置されたカメラを用いてトレーラの後方を撮影してこれに基づいてトレーラの動きを表示するもので、連結車両の周辺を確認するものではなく、右左折時の巻き込み支援をできるものではなかった。
しかしながら、特許文献1に開示された技術は、トレーラに設置されたカメラを用いてトレーラの後方を撮影してこれに基づいてトレーラの動きを表示するもので、連結車両の周辺を確認するものではなく、右左折時の巻き込み支援をできるものではなかった。
本発明は、このような課題に鑑みて案出されたもので、トラクタとトレーラが複雑な動きをする連結車においても、連結車両周辺の状況を容易に把握することができるようにした、連結車両用鳥瞰図表示システムを提供することを目的とする。
上記目的を達成するため、本発明の連結車両用鳥瞰図表示システムは、トラクタとトレーラとからなる連結車両周辺の鳥瞰図を表示する連結車両用鳥瞰図表示システムであって、前記トラクタに設けられ前記トラクタの周辺を撮像するトラクタカメラと、前記トレーラに設けられ前記トレーラの周辺を撮像するトレーラカメラと、前記トラクタと前記トレーラとの連結部の相対角度を検出する相対角度検出手段と、前記トラクタカメラが撮像した前記トラクタ周辺のトラクタ周辺撮像画像を、上方から鳥瞰した画像に変換してトラクタ周辺鳥瞰画像を得ると共に、前記トレーラカメラが撮像した前記トレーラ周辺のトレーラ周辺撮像画像を、上方から鳥瞰した画像に変換してトレーラ周辺鳥瞰画像を得る鳥瞰画像変換手段と、前記トラクタ周辺鳥瞰画像と前記トレーラ周辺鳥瞰画像とを合成して、前記連結車両周辺の鳥瞰画像を生成する鳥瞰画像合成手段と、前記鳥瞰画像合成手段により生成された前記連結車両周辺の鳥瞰画像を表示する画像表示手段とを備え、前記鳥瞰画像合成手段は、前記相対角度検出手段により検出された前記相対角度に応じて、前記トラクタ周辺鳥瞰画像と前記トレーラ周辺鳥瞰画像とを合成して前記連結車両周辺の鳥瞰画像を生成することを特徴としている。
また、前記鳥瞰画像合成手段は、前記相対角度に応じて前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像の、前記連結車両周辺の鳥瞰画像における表示領域を決定し、前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像の重複する部分については、何れか一方の画像の表示を優先することにより前記連結車両周辺の鳥瞰画像を合成することが好ましい。
また、前記鳥瞰画像合成手段は、前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像をそれぞれ格子状に分けて各格子画像にそれぞれ識別名称(格子番号)を与え、前記識別名称を用いて、前記格子画像ごとに、前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域の決定と、重複部分の表示を行うことが好ましい。
また、前記格子画像ごとに、前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を記述するマップデータをさらに備え、前記鳥瞰画像合成手段は、前記マップデータを用いて、前記格子画像の前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を決定することが好ましい。
また、前記格子画像ごとに、前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を記述するマップデータをさらに備え、前記鳥瞰画像合成手段は、前記マップデータを用いて、前記格子画像の前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を決定することが好ましい。
また、前記トラクタカメラが、前記トラクタの左右側部にそれぞれ設けられ前記トラクタの左右側方を撮像するトラクタ側方カメラからなり、前記トレーラカメラが、前記トレーラの左右側部にそれぞれ設けられ前記トレーラの左右側方を撮像するトレーラ側方カメラからなることが好ましい。
また、前記トラクタカメラが、前記トラクタの左右側部にそれぞれ設けられ前記トラクタの左右側方を撮像するトラクタ側方カメラと、前記トラクタの前部に設けられ前記トラクタの前方を撮像するトラクタ前方カメラからなり、前記トレーラカメラが、前記トレーラの左右側部にそれぞれ設けられ前記トレーラの左右側方を撮像するトレーラ側方カメラと、前記トレーラの後部に設けられ前記トレーラの後方を撮像するトレーラ後方カメラからなることが好ましい。
また、前記トラクタカメラが、前記トラクタの左右側部にそれぞれ設けられ前記トラクタの左右側方を撮像するトラクタ側方カメラと、前記トラクタの前部に設けられ前記トラクタの前方を撮像するトラクタ前方カメラからなり、前記トレーラカメラが、前記トレーラの左右側部にそれぞれ設けられ前記トレーラの左右側方を撮像するトレーラ側方カメラと、前記トレーラの後部に設けられ前記トレーラの後方を撮像するトレーラ後方カメラからなることが好ましい。
本発明の連結車両用鳥瞰図表示システムによれば、トラクタ周辺を鳥瞰視表示した画像とトレーラ周辺を鳥瞰視表示した画像とを、トラクタとトレーラの連結部の相対角度に応じて合成することにより、連結車両周辺を上方の視点から鳥瞰した鳥瞰画像を生成し、表示することが出来る。これにより、相対角度が変化するという連結車両特有の動きに起因して周囲状況の把握が難しい連結車両において、ドライバはこの車両の鳥瞰画像から、連結車両特有の動きに応じた周囲状況を把握して運転することが可能となる。
また、連結部の相対角度に応じて、トラクタ周辺を鳥瞰視表示した画像とトレーラ周辺を鳥瞰視表示した画像の表示領域を決定し、重複部分の合成を行うことで、トラクタとトレーラの相対関係に応じた結車両周辺の鳥瞰画像を確実に生成することができる。
またトラクタ周辺を鳥瞰視表示した画像とトレーラ周辺を鳥瞰視表示した画像をそれぞれ格子状に分けて、格子ごとに重複するかどうかの判断を行うことで、画像処理の負担を軽減し、容易に画像の合成を行うことができる。
またトラクタ周辺を鳥瞰視表示した画像とトレーラ周辺を鳥瞰視表示した画像をそれぞれ格子状に分けて、格子ごとに重複するかどうかの判断を行うことで、画像処理の負担を軽減し、容易に画像の合成を行うことができる。
また、トラクタとトレーラの連結部の相対角度に応じて、連結車両周辺を上方の視点から鳥瞰した鳥瞰画像におけるトラクタ周辺を鳥瞰視表示した画像の表示領域とトレーラ周辺を鳥瞰視表示した画像の表示領域とを記述したマップデータを用いて、相対角度に応じた連結車両周辺の鳥瞰画像における表示領域を決定することにより、さらに画像処理部の負担を軽減し、容易に画像の合成を行うことができる。
また、トラクタの左右側方を撮像するトラクタ側方カメラと、トレーラの左右側方を撮像するトレーラ側方カメラを備えることにより、連結車両特有の動きに起因して周囲状況の把握が難しい連結車両において、ドライバは車両の鳥瞰画像から、連結車両の側方周辺の状況把握することが可能となり、右左折時の巻き込み防止に役立てることができ、安全性を向上させることができる。
また、トラクタの左右側方を撮像するトラクタ側方カメラと、トラクタの前方を撮像するトラクタ前方カメラと、トレーラの左右側方を撮像するトレーラ側方カメラと、トレーラの後方を撮像するトレーラ後方カメラを備えることにより、連結車両特有の動きに起因して周囲状況の把握が難しい連結車両において、ドライバは車両の鳥瞰画像から、連結車両前後を含む周辺の状況把握することが可能となり、駐車等を支援することができ、さらに安全性を向上させることができる。
以下、図面により、本発明の一実施形態に係る連結車両用鳥瞰図表示システムについて説明する。図1は本表示システムにおける撮像範囲を説明する模式図、図2は本表示システムにおける、連結車両周辺の鳥瞰画像の生成を説明する模式図、図3は本表示システムの全体構成を示すブロック図である。
<全体構成>
本発明の一実施形態に係る連結車両用鳥瞰図表示システムは、図1に示すように、連結車両1に適用されるものであって、連結車両1のトラクタ2とトレーラ3の相対角度に応じて、トラクタ2の前方及び左右側方、並びにトレーラ3の左右側方及び後方に備えられたカメラ4〜9により撮像された画像から、連結車両の上方の視点から鳥瞰した鳥瞰画像を合成し、画像表示範囲17に示す連結車両の周囲を鳥瞰視表示する画像の表示を行うものである。
本発明の一実施形態に係る連結車両用鳥瞰図表示システムは、図1に示すように、連結車両1に適用されるものであって、連結車両1のトラクタ2とトレーラ3の相対角度に応じて、トラクタ2の前方及び左右側方、並びにトレーラ3の左右側方及び後方に備えられたカメラ4〜9により撮像された画像から、連結車両の上方の視点から鳥瞰した鳥瞰画像を合成し、画像表示範囲17に示す連結車両の周囲を鳥瞰視表示する画像の表示を行うものである。
図3に示すように、本実施形態に係る連結車両用鳥瞰図表示システムが適用される連結車両には、画像処理部31と、トラクタ前方カメラ4と、トラクタ左側方カメラ5と、トラクタ右側方カメラ6と、トレーラ左側方カメラ7と、トレーラ右側方カメラ8と、トレーラ後方カメラ9と、連結車両1の連結部10のカプラ部32に備えられた相対角度検出手段としての角度センサ33と、画像表示部(手段)38とが設けられている。
画像処理部31は、図示しない入出力装置,制御プログラムや制御マップ等の記憶に供される記憶装置(ROM,RAM等),中央処理装置(CPU)及びタイマカウンタ等を備えて構成されている。
また、画像処理部31には、鳥瞰画像変換部(鳥瞰画像変換手段)34、鳥瞰画像補正部(鳥瞰画像補正手段)35、鳥瞰画像合成部(鳥瞰画像合成手段)36、及びマップデータ記憶部(マップデータ記憶手段)37が機能要素として設けられている。この実施形態では、これら鳥瞰画像変換部34、鳥瞰画像補正部35、鳥瞰画像合成部36、及びマップデータ記憶部37は、コンピュータプログラムによるソフトウエアとして設けられている。
また、画像処理部31には、鳥瞰画像変換部(鳥瞰画像変換手段)34、鳥瞰画像補正部(鳥瞰画像補正手段)35、鳥瞰画像合成部(鳥瞰画像合成手段)36、及びマップデータ記憶部(マップデータ記憶手段)37が機能要素として設けられている。この実施形態では、これら鳥瞰画像変換部34、鳥瞰画像補正部35、鳥瞰画像合成部36、及びマップデータ記憶部37は、コンピュータプログラムによるソフトウエアとして設けられている。
画像処理部31の入力側には、トラクタ前方カメラ4、トラクタ左側方カメラ5、トラクタ右側方カメラ6、トレーラ左側方カメラ7、トレーラ右側方カメラ8、及びトレーラ後方カメラ9の6つのカメラ、並びに角度センサ33が接続されている。各カメラ4〜9により撮像された画像信号及び角度センサ33により測定された相対角度の情報が画像処理部31に送られるようになっている。そして、画像処理部31は、上記情報(信号)を受信したら、上記情報に基づいて、撮像された画像データを一つの画像に合成処理を行い、連結車両の上方の視点から鳥瞰した連結車両周辺の鳥瞰画像の生成を行う。さらに、画像処理部31は、上記連結車両周辺の鳥瞰画像のデータから、連結車両周辺を上方の視点から鳥瞰した画像を表示する画像信号を生成し、画像表示部38に送信するようになっている。
鳥瞰画像変換部34は、トラクタ前方カメラ4、トラクタ左側方カメラ5、トラクタ右側方カメラ6、トレーラ左側方カメラ7、トレーラ右側方カメラ8、及びトレーラ後方カメラ9により撮像された画像を元にして、車両の上方の視点から鳥瞰した鳥瞰画像を作成する。撮像画像から鳥瞰画像への変換は、公知の方法を用いることが出来る。
鳥瞰画像補正部35は、鳥瞰画像変換部34により変換された鳥瞰画像の補正を行う。本実施例においては、鳥瞰画像補正部35は、カメラの取り付け位置に応じて、又はトラクタ2とトレーラ3の相対角度に応じて、連結車両1(ここでは、トレーラ3)に対する鳥瞰画像位置の回転補正を行う。この回転補正は、連結部10に設けられたカプラ部32の回転中心を中心としてトラクタ2側の鳥瞰画像或いはトレーラ3側の鳥瞰画像を回転させて位置補正をする。本実施形態では、トレーラ3を基準に画像表示を行なうので、トレーラ3側の鳥瞰画像を固定し、トラクタ2側の鳥瞰画像を回転補正する。
鳥瞰画像補正部35は、鳥瞰画像変換部34により変換された鳥瞰画像の補正を行う。本実施例においては、鳥瞰画像補正部35は、カメラの取り付け位置に応じて、又はトラクタ2とトレーラ3の相対角度に応じて、連結車両1(ここでは、トレーラ3)に対する鳥瞰画像位置の回転補正を行う。この回転補正は、連結部10に設けられたカプラ部32の回転中心を中心としてトラクタ2側の鳥瞰画像或いはトレーラ3側の鳥瞰画像を回転させて位置補正をする。本実施形態では、トレーラ3を基準に画像表示を行なうので、トレーラ3側の鳥瞰画像を固定し、トラクタ2側の鳥瞰画像を回転補正する。
鳥瞰画像合成部36は、鳥瞰画像変換部34により変換された鳥瞰画像、又は鳥瞰画像補正部35により回転補正をされた鳥瞰画像を合成することで、連結車両1の上方の視点から連結車両周辺の画像表示範囲17を鳥瞰した、連結車両周辺の鳥瞰画像を生成する。
画像表示部38は、画像処理部31から画像信号を受信し、連結車両周辺を上方の視点から鳥瞰した画像の表示を行う。画像表示部38は、詳細を図示しないが、例えば、連結車両の運転席に備え付けられたディスプレイと、このディスプレイの表示を制御する表示制御装置とから構成される。
画像表示部38は、画像処理部31から画像信号を受信し、連結車両周辺を上方の視点から鳥瞰した画像の表示を行う。画像表示部38は、詳細を図示しないが、例えば、連結車両の運転席に備え付けられたディスプレイと、このディスプレイの表示を制御する表示制御装置とから構成される。
マップデータ記憶部37は、鳥瞰画像の合成に用いるマップデータが格納されている。
トラクタ前方カメラ4は、図1に示すように、トラクタの前方を撮像するための撮像手段として、トラクタ前部に斜め下方向を向けて設置されている。トラクタ前方カメラ4により、トラクタの前方を撮像範囲11としたトラクタ前方撮像画像が得られる。
トラクタ左側方カメラ5は、図1に示すように、トラクタの左側方を撮像するための撮像手段として、トラクタ左側部に斜め下方向を向けて設置されている。トラクタ左側方カメラ5により、トラクタの左側方を撮像範囲12としたトラクタ左側方撮像画像が得られる。
トラクタ前方カメラ4は、図1に示すように、トラクタの前方を撮像するための撮像手段として、トラクタ前部に斜め下方向を向けて設置されている。トラクタ前方カメラ4により、トラクタの前方を撮像範囲11としたトラクタ前方撮像画像が得られる。
トラクタ左側方カメラ5は、図1に示すように、トラクタの左側方を撮像するための撮像手段として、トラクタ左側部に斜め下方向を向けて設置されている。トラクタ左側方カメラ5により、トラクタの左側方を撮像範囲12としたトラクタ左側方撮像画像が得られる。
トラクタ右側方カメラ6は、図1に示すように、トラクタの右側方の撮像するための撮像手段として、トラクタ右側部に斜め下方向を向けて設置されている。トラクタ右側方カメラ6により、トラクタの右側方を撮像範囲13としたトラクタ右側方撮像画像が得られる。
トレーラ左側方カメラ7は、図1に示すように、トレーラの左側方を撮像するための撮像手段として、トレーラの左側部に斜め下方向を向けて設置されている。トレーラ左側方カメラ7により、トレーラの左側方を撮像範囲14としたトレーラ左側方撮像画像が得られる。
トレーラ左側方カメラ7は、図1に示すように、トレーラの左側方を撮像するための撮像手段として、トレーラの左側部に斜め下方向を向けて設置されている。トレーラ左側方カメラ7により、トレーラの左側方を撮像範囲14としたトレーラ左側方撮像画像が得られる。
トレーラ右側方カメラ8は、図1に示すように、トレーラの右側方の撮像するための撮像手段として、トレーラ右側部に斜め下方向を向けて設置されている。トレーラ右側方カメラ8により、トレーラの右側方を撮像範囲15としたトレーラ右側方撮像画像が得られる。
トレーラ後方カメラ9は、図1に示すように、トレーラの後方を撮像するための撮像手段として、トレーラ後部に斜め下方向を向けて設置されている。トレーラ後方カメラ9により、トレーラの後方を撮像範囲16としたトレーラ後方撮像画像が得られる。
トレーラ後方カメラ9は、図1に示すように、トレーラの後方を撮像するための撮像手段として、トレーラ後部に斜め下方向を向けて設置されている。トレーラ後方カメラ9により、トレーラの後方を撮像範囲16としたトレーラ後方撮像画像が得られる。
ここで、それぞれのカメラは各々の撮像範囲11〜16が、それぞれの撮像範囲の周辺領域において重複し、連結車両の周囲に死角を生ずることが無いように配置する。さらに、連結車両においては、トラクタ2とトレーラ3が連結角度をなして、その相対位置を変化させるため、トラクタ側方カメラとトレーラ側方カメラとが、トラクタ2とトレーラ3の相対位置が変化しても死角が生じることの無いよう撮像範囲11〜16の一部が重なるようにカメラ4〜9を配置する。また、死角を生ずることの無いよう、例えば魚眼レンズのような視野角の広い広角カメラを用いることが好ましい。
角度センサ33は、トラクタ2とトレーラ3の連結部に設けられたカプラ部32に設置されている。角度センサ33はトラクタ2とトレーラ3の相対角度を検知するようになっている。
ここで、トラクタ2の前後方向を結ぶ軸と、トレーラ3の前後軸方向を結ぶ軸とがなす角を相対角度とする。図1(a)に示すように、トラクタとトレーラがともに直進方向を向いている場合に相対角度を0度(相対角度なし)とし、例えば、図1(b)に左折を行う場合を例示するように、右左折等の左右への操舵を行う場合には、トレーラの前後方向を結ぶ軸と、トラクタの前後軸方向を結ぶ軸が連結部10において角度を成す。この場合には、相対角度が発生し、両軸のなす角度をトラクタ2とトレーラ3の相対角度とする。
ここで、トラクタ2の前後方向を結ぶ軸と、トレーラ3の前後軸方向を結ぶ軸とがなす角を相対角度とする。図1(a)に示すように、トラクタとトレーラがともに直進方向を向いている場合に相対角度を0度(相対角度なし)とし、例えば、図1(b)に左折を行う場合を例示するように、右左折等の左右への操舵を行う場合には、トレーラの前後方向を結ぶ軸と、トラクタの前後軸方向を結ぶ軸が連結部10において角度を成す。この場合には、相対角度が発生し、両軸のなす角度をトラクタ2とトレーラ3の相対角度とする。
<連結車両周辺の鳥瞰画像について>
次に、本実施形態の連結車両用鳥瞰図について詳しく説明する。
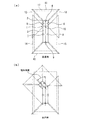
この連結車両用鳥瞰図は、図2(a),(b)に示すように、連結車両1の上方の視点から連結車両周辺の画像表示範囲27を鳥瞰した、連結車両周辺の鳥瞰画像を表示するものである。この連結車両周辺の鳥瞰画像は、鳥瞰画像変換部34により変換された鳥瞰画像、又は鳥瞰画像補正部35により回転補正をされた鳥瞰画像を合成することで得る。
なお、各カメラによる撮像しうる撮像範囲は有限であるため、それらを変換・合成して得られる連結車両周辺の鳥瞰画像の範囲も有限となる。このとき、連結車両周辺の鳥瞰画像の画像表示範囲は、各カメラの最大撮像範囲に合わせて表示させてもよいが、画像の見易さと画像表示部の領域の大きさの制限との観点からは、連結車両の周囲を十分に観察できる範囲で、図2(a),(b)に破線で囲んだ領域で示す画像表示範囲27のように、一定の領域に映像表示範囲を区切って表示することが好ましい。
次に、本実施形態の連結車両用鳥瞰図について詳しく説明する。
この連結車両用鳥瞰図は、図2(a),(b)に示すように、連結車両1の上方の視点から連結車両周辺の画像表示範囲27を鳥瞰した、連結車両周辺の鳥瞰画像を表示するものである。この連結車両周辺の鳥瞰画像は、鳥瞰画像変換部34により変換された鳥瞰画像、又は鳥瞰画像補正部35により回転補正をされた鳥瞰画像を合成することで得る。
なお、各カメラによる撮像しうる撮像範囲は有限であるため、それらを変換・合成して得られる連結車両周辺の鳥瞰画像の範囲も有限となる。このとき、連結車両周辺の鳥瞰画像の画像表示範囲は、各カメラの最大撮像範囲に合わせて表示させてもよいが、画像の見易さと画像表示部の領域の大きさの制限との観点からは、連結車両の周囲を十分に観察できる範囲で、図2(a),(b)に破線で囲んだ領域で示す画像表示範囲27のように、一定の領域に映像表示範囲を区切って表示することが好ましい。
連結車両周辺の鳥瞰画像の表示部中心は、連結車両を示しており、この連結車両を中心に表示し、その周囲に結車両周辺の鳥瞰画像を表示する。この連結車両を示す領域には、連結車両を上方から見た場合のトラクタ2の写真画像又はイメージ画像28、及びトレーラ3の写真画像又はイメージ画像29を表示する。
連結車両周辺の鳥瞰画像は、図2(a),(b)に示すように、連結車両を上方の視点から見た場合に、連結車両のトレーラ3の前後方向(全長方向)の向きが鳥瞰画像の上下方向に対応するようにトレーラ画像29が表示され、トレーラ3の進行方向が画像の上側を向くようにトレーラ画像29が表示される。
連結車両周辺の鳥瞰画像は、図2(a),(b)に示すように、連結車両を上方の視点から見た場合に、連結車両のトレーラ3の前後方向(全長方向)の向きが鳥瞰画像の上下方向に対応するようにトレーラ画像29が表示され、トレーラ3の進行方向が画像の上側を向くようにトレーラ画像29が表示される。
ここで、連結車両の画像は、図2(b)に示すように、角度センサ33により検知されたトラクタ2とトレーラ3の相対角度に応じて、トラクタ2とトレーラ3が検知された相対角度をとるように、トラクタ画像28をトレーラ画像29に対して連結部を中心に回転させて表示する。
また、連結車両周辺の鳥瞰画像は、カメラ4〜9により撮像され、鳥瞰画像変換部34により変換された後述する鳥瞰画像を、それぞれのカメラが設置された連結車の位置に対応するように配置することで生成される。すなわち、トレーラ画像29を中心とした連結車両周辺の鳥瞰画像において、トラクタ2とトレーラ3の相対角度が0度の場合、トラクタ画像28の上側にあたる領域にトラクタ前方鳥瞰画像21が配置され、トラクタ画像28の左側にあたる領域にトラクタ左側方鳥瞰画像22が配置され、トラクタ画像28の右側にあたる領域にトラクタ右側方鳥瞰画像23が配置される。また、トレーラ画像29の左側にあたる領域にトレーラ左側方鳥瞰画像24が配置され、トレーラ画像29の右側にあたる領域にトレーラ右側方鳥瞰画像25が配置され、トレーラ画像29の下側にあたる領域にトレーラ後方鳥瞰画像26が配置される。
また、連結車両周辺の鳥瞰画像は、カメラ4〜9により撮像され、鳥瞰画像変換部34により変換された後述する鳥瞰画像を、それぞれのカメラが設置された連結車の位置に対応するように配置することで生成される。すなわち、トレーラ画像29を中心とした連結車両周辺の鳥瞰画像において、トラクタ2とトレーラ3の相対角度が0度の場合、トラクタ画像28の上側にあたる領域にトラクタ前方鳥瞰画像21が配置され、トラクタ画像28の左側にあたる領域にトラクタ左側方鳥瞰画像22が配置され、トラクタ画像28の右側にあたる領域にトラクタ右側方鳥瞰画像23が配置される。また、トレーラ画像29の左側にあたる領域にトレーラ左側方鳥瞰画像24が配置され、トレーラ画像29の右側にあたる領域にトレーラ右側方鳥瞰画像25が配置され、トレーラ画像29の下側にあたる領域にトレーラ後方鳥瞰画像26が配置される。
さらに、トラクタ前方鳥瞰画像21、トラクタ左側方鳥瞰画像22、及びトラクタ右側方鳥瞰画像23は、トラクタ画像28がトレーラ画像29に対して、トラクタ2とトレーラ3の相対角度に応じて連結部を中心に回転するのに連動して、トラクタ画像28の周囲に配置されたトラクタ前方鳥瞰画像21、トラクタ左側方鳥瞰画像22、及びトラクタ右側方鳥瞰画像23も、鳥瞰画像補正部35により回転補正を受け、トラクタ画像28に追従して回転・移動して配置されるようになっている。
なお、連結車両周辺の鳥瞰画像において、トラクタ2とトレーラ3の相対位置の変化に伴い、カメラの撮像範囲が変化して、カメラの撮像範囲では連結車両周辺の画像表示範囲27の全てに鳥瞰画像を表示できない場合がある。この場合、鳥瞰画像を表示できない領域には、それを表す画像、又はその領域を単一色で塗りつぶすことにより、表示できない領域であることがわかるように表示を行えば良い。
<連結車両周辺の鳥瞰画像の生成>
以下、本発明の実施形態にかかる、連結車両周辺の鳥瞰画像の生成を行う手順について説明する。
鳥瞰画像変換部34は、カメラ4〜9により撮像された画像を元にして、上方の視点から鳥瞰した鳥瞰画像を作成する。この処理には、周知の画像変換技術を用いる。
以下、本発明の実施形態にかかる、連結車両周辺の鳥瞰画像の生成を行う手順について説明する。
鳥瞰画像変換部34は、カメラ4〜9により撮像された画像を元にして、上方の視点から鳥瞰した鳥瞰画像を作成する。この処理には、周知の画像変換技術を用いる。
この鳥瞰画像変換処理により、トラクタ前方撮像画像から、トラクタの前方の撮像範囲11を上方の視点から鳥瞰したトラクタ前方鳥瞰画像21が得られる。
また、トラクタ左側方撮像画像から、トラクタの左側方の撮像範囲12を上方の視点から鳥瞰したトラクタ左側方鳥瞰画像22が得られる。
また、トラクタ右側方撮像画像から、トラクタの右側方の撮像範囲13を上方の視点から鳥瞰したトラクタ右側方鳥瞰画像23が得られる。
また、トレーラ左側方撮像画像から、トレーラの左側方の撮像範囲14を上方の視点から鳥瞰したトレーラ左側方鳥瞰画像24が得られる。
また、トレーラ右側方撮像画像から、トレーラの右側方の撮像範囲15を上方の視点から鳥瞰したトレーラ右側方鳥瞰画像25が得られる。
また、トレーラ後方撮像画像から、トレーラの後方の撮像範囲16を上方の視点から鳥瞰したトレーラ後方鳥瞰画像26が得られる。
また、トラクタ左側方撮像画像から、トラクタの左側方の撮像範囲12を上方の視点から鳥瞰したトラクタ左側方鳥瞰画像22が得られる。
また、トラクタ右側方撮像画像から、トラクタの右側方の撮像範囲13を上方の視点から鳥瞰したトラクタ右側方鳥瞰画像23が得られる。
また、トレーラ左側方撮像画像から、トレーラの左側方の撮像範囲14を上方の視点から鳥瞰したトレーラ左側方鳥瞰画像24が得られる。
また、トレーラ右側方撮像画像から、トレーラの右側方の撮像範囲15を上方の視点から鳥瞰したトレーラ右側方鳥瞰画像25が得られる。
また、トレーラ後方撮像画像から、トレーラの後方の撮像範囲16を上方の視点から鳥瞰したトレーラ後方鳥瞰画像26が得られる。
連結車両周辺の鳥瞰画像を生成するにあたって、各鳥瞰画像が連結車両周辺の鳥瞰画像において表示される領域を、トラクタ2に対するトレーラ3の角度に応じて計算を行い、算出結果に基づいて鳥瞰画像を配置してもよいが、本実施形態では、マップデータを用いて各鳥瞰画像の表示領域を決定して、連結車両周辺の鳥瞰画像の生成を行う。
ここで、マップデータとは、鳥瞰画像変換部34により変換された鳥瞰画像を格子状に分け、各格子に識別名称として格子番号を与えて区別できるようにした場合において、格子番号の格子領域ごとに、連結車両周辺の鳥瞰画像において各格子領域の画像(格子画像ともいう)が表示される領域が記述されたデータである。
なお、連結車両周辺の鳥瞰画像における各格子画像の表示領域が、トラクタ2とトレーラ3の相対角度に応じて変化する場合には、トラクタ2とトレーラ3の相対角度に対応した各格子画像の表示領域がマップデータに記述されている。
なお、連結車両周辺の鳥瞰画像における各格子画像の表示領域が、トラクタ2とトレーラ3の相対角度に応じて変化する場合には、トラクタ2とトレーラ3の相対角度に対応した各格子画像の表示領域がマップデータに記述されている。
換言すれば、マップデータは、トラクタ2とトレーラ3の相対角度とに基づいて、トラクタ前方鳥瞰画像21の各格子画像、トラクタ左側方鳥瞰画像22の各格子画像、トラクタ右側方鳥瞰画像23の各格子画像、トレーラ左側方鳥瞰画像24の各格子画像、トレーラ右側方鳥瞰画像25の各格子画像、及びトレーラ後方鳥瞰画像26の各格子画像が、連結車両周辺の鳥瞰画像のどの領域に表示されるかを規定する。
連結車両周辺の鳥瞰画像を生成するにあたって、各鳥瞰画像の表示の処理について説明する。
まず、鳥瞰画像合成部36は、図2(a)に示すように、各鳥瞰画像を格子状に分け、各格子領域に格子番号を与える。
次に、鳥瞰画像合成部36は、マップデータ記憶部37からマップデータを読み出し、格子番号に対応するマップデータを参照する。各鳥瞰画像の各格子番号と相対角度をマップデータに適用することで、その格子番号の格子画像が、連結車両周辺の鳥瞰画像のどの領域に表示されるかが読み出されるようになっている。
まず、鳥瞰画像合成部36は、図2(a)に示すように、各鳥瞰画像を格子状に分け、各格子領域に格子番号を与える。
次に、鳥瞰画像合成部36は、マップデータ記憶部37からマップデータを読み出し、格子番号に対応するマップデータを参照する。各鳥瞰画像の各格子番号と相対角度をマップデータに適用することで、その格子番号の格子画像が、連結車両周辺の鳥瞰画像のどの領域に表示されるかが読み出されるようになっている。
鳥瞰画像合成部は、マップデータから読み出された表示領域に従い、連結車両周辺の鳥瞰画像に、各鳥瞰画像の各格子番号ごとに対応する格子画像の配置を行う。
なお、トラクタ2とトレーラ3の相対角度が変化する場合には、図2(b)に示すように、相対角度に応じて各鳥瞰画像の各格子番号の格子画像の表示領域が変化する。このため、鳥瞰画像補正部35により、格子画像は適宜回転補正が施されて配置される。なお、鳥瞰画像補正部35は、鳥瞰画像に対して、適宜拡大及び縮小処理、並びにトリミング処理を行ってもよい。
なお、トラクタ2とトレーラ3の相対角度が変化する場合には、図2(b)に示すように、相対角度に応じて各鳥瞰画像の各格子番号の格子画像の表示領域が変化する。このため、鳥瞰画像補正部35により、格子画像は適宜回転補正が施されて配置される。なお、鳥瞰画像補正部35は、鳥瞰画像に対して、適宜拡大及び縮小処理、並びにトリミング処理を行ってもよい。
これにより、各鳥瞰画像を合成して連結車両周辺の鳥瞰画像を生成する際に、トラクタ2に備えられたカメラにより撮像された各々の周辺画像は、連結車両1の上方の視点から見た場合に、トレーラ3に対するトラクタ2の角度に連動して、連結車両周辺の鳥瞰画像上に配置され、トラクタ2の周囲の状況を反映して表示される。
連結車両周辺の鳥瞰画像を生成するにあたり、各鳥瞰図の重複部分の処理について説明する。
図2の(c)〜(d)はこの処理を説明するための図であり、図2(c),(d)はそれぞれ、図2(a),(b)の一部領域を拡大して表示した物である。
連結車両の各部に設けられたカメラは、その撮像範囲がオーバーラップするように配置されており、撮像する画像及び変換される鳥瞰画像21〜26の表示範囲も重複する。このため、連結車両周辺の鳥瞰画像を生成するにあたり、各鳥瞰画像21〜26の重複部分の処理を行う必要がある。
図2の(c)〜(d)はこの処理を説明するための図であり、図2(c),(d)はそれぞれ、図2(a),(b)の一部領域を拡大して表示した物である。
連結車両の各部に設けられたカメラは、その撮像範囲がオーバーラップするように配置されており、撮像する画像及び変換される鳥瞰画像21〜26の表示範囲も重複する。このため、連結車両周辺の鳥瞰画像を生成するにあたり、各鳥瞰画像21〜26の重複部分の処理を行う必要がある。
特に、連結車両においては、トラクタ2とトレーラ3とが相対角度(連結角)をなして、その相対位置を変化させるため、トラクタ2の側方カメラ5,6とトレーラ3の側方カメラ7,8との関係においては、トラクタ2とトレーラ3との相対位置の変化に応じて、トラクタ側方カメラ5,6とトレーラ側方カメラ7,8等の重複部分が変化するため、相対角度に応じて重複部分の処理を行う必要がある。
このため、鳥瞰画像合成部36は、各々のカメラに4〜9より撮像された画像から変換された鳥瞰画像の、連結車両周辺の鳥瞰画像における表示領域が、他のカメラにより撮像された画像から変換された鳥瞰画像の表示領域と重複する場合には、一のカメラにより撮像された画像から変換された鳥瞰画像を、他のカメラにより撮像された画像から変換された鳥瞰画像より優先して表示を行うことで、各々の鳥瞰画像の合成を行う。つまり、重複する一方の格子番号の格子画像を表示し、重複する他方の格子番号の格子画像の重複部分は表示しない。一方、他の鳥瞰画像と重複しない場合には、画像をそのまま表示を行う。
なお、鳥瞰画像が重複する場合において、優先して表示される画像はいずれの鳥瞰画像に由来する格子の画像であってもよいが、いずれか一方の鳥瞰画像を優先して表示することを定めておくことが好ましい。
鳥瞰画像の重複処理においては、画素単位で重複処理を行ってもよいが、本実施例においては、前述した、各鳥瞰画像を格子状に分け、各格子に格子番号を与えた各格子画像ごとに合成を行う。
鳥瞰画像の重複処理においては、画素単位で重複処理を行ってもよいが、本実施例においては、前述した、各鳥瞰画像を格子状に分け、各格子に格子番号を与えた各格子画像ごとに合成を行う。
なお、各格子画像の重複処理については、その都度重複部分の判定を行い、合成を行ってもよいが、あらかじめマップデータに重複関係を記憶させておき、マップデータから重複関係を読み出して、合成を行ってもよい。
ここで、本実施例においては、トラクタ左側方鳥瞰画像22を、トレーラ左側方鳥瞰画像24に優先して表示を行う場合について説明する。
ここで、本実施例においては、トラクタ左側方鳥瞰画像22を、トレーラ左側方鳥瞰画像24に優先して表示を行う場合について説明する。
図2(a)示すように、トラクタ左側方カメラ5に由来するトラクタ左側方鳥瞰画像22と、トレーラ左側方カメラ7に由来するトレーラ左側方鳥瞰画像24の表示領域は重複しており、また、図2(b)示すように、トラクタ2とトレーラ3との相対角度に応じて、重複部分は変化する。
図2(c)示すように、トラクタ左側方鳥瞰画像22の格子番号A2〜A4、A6〜A9、A11〜A15、及びA16〜A21の格子画像については、トレーラ左側方鳥瞰画像24に優先して表示を行う。また、トレーラ左側方鳥瞰画像24の表示領域のうち、トラクタ左側方鳥瞰画像22の表示領域と重複しない格子番号B2〜B6、B8〜B11、B13〜B15、B17、及びB18の格子画像についてはそのまま表示を行う。一方、トレーラ左側方鳥瞰画像24の表示領域のうち、トラクタ左側方鳥瞰画像22の表示領域と重複する、B1、B7、B12、及びB16の格子画像には、トラクタ左側方鳥瞰画像22のA4、A9、A15、及びA21の格子が優先して表示される。
図2(c)示すように、トラクタ左側方鳥瞰画像22の格子番号A2〜A4、A6〜A9、A11〜A15、及びA16〜A21の格子画像については、トレーラ左側方鳥瞰画像24に優先して表示を行う。また、トレーラ左側方鳥瞰画像24の表示領域のうち、トラクタ左側方鳥瞰画像22の表示領域と重複しない格子番号B2〜B6、B8〜B11、B13〜B15、B17、及びB18の格子画像についてはそのまま表示を行う。一方、トレーラ左側方鳥瞰画像24の表示領域のうち、トラクタ左側方鳥瞰画像22の表示領域と重複する、B1、B7、B12、及びB16の格子画像には、トラクタ左側方鳥瞰画像22のA4、A9、A15、及びA21の格子が優先して表示される。
トラクタ2とトレーラ3の連結角が変化した場合には、図2(d)に示すように、重複部分が変化するため、重複部分の変化に対応して、トレーラ左側方鳥瞰画像24に、トラクタ左側方鳥瞰画像22が優先して表示される。
このようにして、各鳥瞰画像の全ての格子について順次表示を行うことで、重複部分の処理の処理を行い、連結車両周辺の鳥瞰画像を生成する。
このようにして、各鳥瞰画像の全ての格子について順次表示を行うことで、重複部分の処理の処理を行い、連結車両周辺の鳥瞰画像を生成する。
上記のようにして、カメラで撮像される画像について、画像処理部31は各フレームの画像ごとに、逐次画像の変換及び合成処理を行い、連続して画像データを画像表示部38に送信することで、運転状態に応じた連結車両の上方の視点から鳥瞰した鳥瞰画像の画像を、リアルタイムに表示を行うことが出来る。
<格子画像の表示領域のキャリブレーション>
マップデータにより読み出される、各格子の連結車両周辺の鳥瞰画像における表示領域及び重複関係は、連結車両に設置されたカメラの設置位置及び取り付け角度、並びに連結車両のトラクタとトレーラの位置関係により変化する。このため、連結車両用鳥瞰図表示システムの使用に当たって、キャリブレーションを行うことによりマップデータの作成、又は補正を行うことが好ましい。
マップデータにより読み出される、各格子の連結車両周辺の鳥瞰画像における表示領域及び重複関係は、連結車両に設置されたカメラの設置位置及び取り付け角度、並びに連結車両のトラクタとトレーラの位置関係により変化する。このため、連結車両用鳥瞰図表示システムの使用に当たって、キャリブレーションを行うことによりマップデータの作成、又は補正を行うことが好ましい。
キャリブレーションは、キャリブレーション用の画像が描かれた画像の上に、本連結車両用鳥瞰図表示システムを搭載した連結車両1を配置して、カメラ4〜9により連結車両周辺のキャリブレーション用の画像を撮像することで行う。
キャリブレーション用の画像を連結車両1に設置されたカメラ4〜9で撮像し、撮像画像を鳥瞰画像に変換する。ここで、連結車両とキャリブレーション用の模様との実際の位置関係と、各鳥瞰画像を格子に区切った場合の各格子画像との表示領域を各格子番号ごとに比較することで、各格子画像の連結車両周辺の鳥瞰画像における表示領域についての情報を取得することができる。これによって得られた格子番号ごとの表示領域についての情報を、マップデータに保存する。
キャリブレーション用の画像を連結車両1に設置されたカメラ4〜9で撮像し、撮像画像を鳥瞰画像に変換する。ここで、連結車両とキャリブレーション用の模様との実際の位置関係と、各鳥瞰画像を格子に区切った場合の各格子画像との表示領域を各格子番号ごとに比較することで、各格子画像の連結車両周辺の鳥瞰画像における表示領域についての情報を取得することができる。これによって得られた格子番号ごとの表示領域についての情報を、マップデータに保存する。
また、キャリブレーション用の画像は、各カメラのオーバーラップ領域にキャリブレーション用の画像が含まれるように描かれている。このキャリブレーション用の画像を連結車両に設置されたカメラで撮像し、撮像画像を鳥瞰画像に変換する。ここで、各鳥瞰画像の各格子番号の格子に表示される画像を比較して、同じ画像が表示されている場合に、それぞれの鳥瞰画像の格子が重複している、すなわち各カメラの撮像領域が重複していると判断される。これによって重複していると判断された格子番号の対応についての情報をマップデータに保存する。
このようにして、相対角度を変化させながら各格子の表示領域及び重複関係を検査することにより、相対角度に応じたマップデータのキャリブレーションを行うことが出来る。
<作用・効果>
本発明の一実施形態に係る衝突被害軽減装置は上述のように構成されているので、以下のような作用及び効果を奏する。
本発明の一実施形態に係る衝突被害軽減装置は上述のように構成されているので、以下のような作用及び効果を奏する。
本連結車両用鳥瞰図表示システムは、トラクタ2の前方及び左右側方、並びにトレーラ3の後方及び左右側方に設けられた6つのカメラにより撮像された画像を、上方から鳥瞰した鳥瞰画像にそれぞれ変換し、トラクタ2とトレーラ3の相対角度に応じて、トラクタ2及びトレーラ3の位置に対応した鳥瞰画像の表示領域を決定して、連結車両周辺の鳥瞰画像を生成する。このため、連結車両特有の動きに起因して周囲状況の把握が難しい連結車両において、トラクタ2とトレーラ3の相対角度に応じて変化するトラクタ2とトレーラ3の位置関係に対応して、鳥瞰画像の表示領域が決定されることで、トラクタ2とトレーラ3の周囲の状況を反映した連結車両周辺の鳥瞰画像が生成される。これにより、ドライバはこの車両の鳥瞰画像から、連結車の周辺の状況を把握することが可能となり、安全性を向上させることができる。
また、鳥瞰視表示した画像をそれぞれ格子状に分けて、トラクタ2とトレーラ3の連結部の相対角度に応じて、各格子ごとに、連結車両周辺を上方の視点から鳥瞰した鳥瞰画像における、各格子画像の表示領域の決定と重複部分の表示を行うことで、画像処理の負担を軽減し容易に画像の合成を行うことができる。
さらに、トラクタ2とトレーラ3の連結部の相対角度に応じて、各格子ごとに、連結車両周辺を上方の視点から鳥瞰した鳥瞰画像における、各格子画像の表示領域を記述するマップデータを保存するマップデータ記憶部37を有し、このマップデータを用いて、格子画像の相対角度に応じた表示領域を決定することにより、さらに画像処理部の負担を軽減し容易に画像の合成を行うことができる。
さらに、トラクタ2とトレーラ3の連結部の相対角度に応じて、各格子ごとに、連結車両周辺を上方の視点から鳥瞰した鳥瞰画像における、各格子画像の表示領域を記述するマップデータを保存するマップデータ記憶部37を有し、このマップデータを用いて、格子画像の相対角度に応じた表示領域を決定することにより、さらに画像処理部の負担を軽減し容易に画像の合成を行うことができる。
[その他]
以上、本発明の実施形態を説明したが、本発明は係る実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することが出来る。
以上、本発明の実施形態を説明したが、本発明は係る実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することが出来る。
例えば、上記実施形態では、トラクタの前方に1台、トラクタの左側方に1台、トラクタの右側方に1台、トレーラの左側方に1台、トレーラの右側方に1台、トラクタの後方に1台のカメラを設置するとしたが、それぞれの箇所、或いは特定の箇所に、複数のカメラを設置し、複数のカメラを用いてトラクタ又はトレーラの周囲を撮像しても良い。また、トレーラ及びトラクタのコーナー部分にカメラを設置しても良い。
また、上記実施形態では、鳥瞰画像変換部は、各カメラにより撮像された画像を元にして、上方の視点から鳥瞰した鳥瞰画像を作成するとしたが、鳥瞰画像を作成するために、当該撮像された画像について、カメラのレンズによる歪みの補正処理を行っても良い。
また、上記実施形態では、各鳥瞰画像が重複する部分について、どちらかの鳥瞰画像の格子の画像を優先表示するとしたが、トラクタとトレーラの相対角度、及び相対角度の変化に伴うカメラの位置関係に基づいて、それぞれの格子ごとにどの格子の画像が表示されるかを定めても良い。この場合、表示の優先順位をマップデータに含め、各格子の格子画像の合成時にマップデータから優先順位を読み出して合成を行っても良い。
また、上記実施形態では、各鳥瞰画像が重複する部分について、どちらかの鳥瞰画像の格子の画像を優先表示するとしたが、トラクタとトレーラの相対角度、及び相対角度の変化に伴うカメラの位置関係に基づいて、それぞれの格子ごとにどの格子の画像が表示されるかを定めても良い。この場合、表示の優先順位をマップデータに含め、各格子の格子画像の合成時にマップデータから優先順位を読み出して合成を行っても良い。
また、上記実施形態では、連結車両周辺の鳥瞰図において、トレーラ画像29を固定し、トラクタ2とトレーラ3との相対角度に応じて、トラクタ画像28をトレーラ画像29に対して回転して表示させるようにしているが、トラクタ画像28固定し、トレーラ画像29を回転して表示させ、トレーラ画像29に追従してトレーラ周囲の鳥瞰画像を配置させてもよい。
1 連結車両
2 トラクタ
3 トレーラ
4 トラクタ前方カメラ
5 トラクタ左側方カメラ
6 トラクタ右側方カメラ
7 トレーラ左側方カメラ
8 トレーラ右側方カメラ
9 トレーラ後方カメラ
10 連結部
11 トラクタ前方カメラ撮像範囲
12 トラクタ左側方カメラ撮像範囲
13 トラクタ右側方カメラ撮像範囲
14 トレーラ左側方カメラ撮像範囲
15 トレーラ右側方カメラ撮像範囲
16 トレーラ後方カメラ撮像範囲
17、27 画像表示範囲
21 トラクタ前方鳥瞰画像
22 トラクタ左側方鳥瞰画像
23 トラクタ右側方鳥瞰画像
24 トレーラ左側方鳥瞰画像
25 トレーラ右側方鳥瞰画像
26 トレーラ後方鳥瞰画像
28 トラクタ画像
29 トレーラ画像
31 画像処理部
32 カプラ部
33 角度センサ
34 鳥瞰画像変換部(鳥瞰画像変換手段)
35 鳥瞰画像補正部(鳥瞰画像補正手段)
36 鳥瞰画像合成部(鳥瞰画像合成手段)
37 マップデータ記憶部(マップデータ記憶手段)
38 画像表示部
2 トラクタ
3 トレーラ
4 トラクタ前方カメラ
5 トラクタ左側方カメラ
6 トラクタ右側方カメラ
7 トレーラ左側方カメラ
8 トレーラ右側方カメラ
9 トレーラ後方カメラ
10 連結部
11 トラクタ前方カメラ撮像範囲
12 トラクタ左側方カメラ撮像範囲
13 トラクタ右側方カメラ撮像範囲
14 トレーラ左側方カメラ撮像範囲
15 トレーラ右側方カメラ撮像範囲
16 トレーラ後方カメラ撮像範囲
17、27 画像表示範囲
21 トラクタ前方鳥瞰画像
22 トラクタ左側方鳥瞰画像
23 トラクタ右側方鳥瞰画像
24 トレーラ左側方鳥瞰画像
25 トレーラ右側方鳥瞰画像
26 トレーラ後方鳥瞰画像
28 トラクタ画像
29 トレーラ画像
31 画像処理部
32 カプラ部
33 角度センサ
34 鳥瞰画像変換部(鳥瞰画像変換手段)
35 鳥瞰画像補正部(鳥瞰画像補正手段)
36 鳥瞰画像合成部(鳥瞰画像合成手段)
37 マップデータ記憶部(マップデータ記憶手段)
38 画像表示部
Claims (6)
- トラクタとトレーラとからなる連結車両周辺の鳥瞰図を表示する連結車両用鳥瞰図表示システムであって、
前記トラクタに設けられ前記トラクタの周辺を撮像するトラクタカメラと、
前記トレーラに設けられ前記トレーラの周辺を撮像するトレーラカメラと、
前記トラクタと前記トレーラとの連結部の相対角度を検出する相対角度検出手段と、
前記トラクタカメラが撮像した前記トラクタ周辺のトラクタ周辺撮像画像を、上方から鳥瞰した画像に変換してトラクタ周辺鳥瞰画像を得ると共に、前記トレーラカメラが撮像した前記トレーラ周辺のトレーラ周辺撮像画像を、上方から鳥瞰した画像に変換してトレーラ周辺鳥瞰画像を得る鳥瞰画像変換手段と、
前記トラクタ周辺鳥瞰画像と前記トレーラ周辺鳥瞰画像とを合成して、前記連結車両周辺の鳥瞰画像を生成する鳥瞰画像合成手段と、
前記鳥瞰画像合成手段により生成された前記連結車両周辺の鳥瞰画像を表示する画像表示手段とを備え、
前記鳥瞰画像合成手段は、前記相対角度検出手段により検出された前記相対角度に応じて、前記トラクタ周辺鳥瞰画像と前記トレーラ周辺鳥瞰画像とを合成して前記連結車両周辺の鳥瞰画像を生成する
ことを特徴とする連結車両用鳥瞰図表示システム。 - 前記鳥瞰画像合成手段は、
前記相対角度に応じて前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像の、前記連結車両周辺の鳥瞰画像における表示領域を決定し、
前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像の重複する部分については、何れか一方の画像の表示を優先することにより前記連結車両周辺の鳥瞰画像を合成する
ことを特徴とする請求項1記載の連結車両用鳥瞰図表示システム。 - 前記鳥瞰画像合成手段は、
前記トラクタ周辺鳥瞰画像及び前記トレーラ周辺鳥瞰画像をそれぞれ格子状に分けて各格子画像にそれぞれ識別名称(格子番号)を与え、
前記識別名称を用いて、前記格子画像ごとに、前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域の決定と、重複部分の表示を行う
ことを特徴とする請求項2記載の連結車両用鳥瞰図表示システム。 - 前記格子画像ごとに、前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を記述するマップデータをさらに備え、
前記鳥瞰画像合成手段は、前記マップデータを用いて、前記格子画像の前記相対角度に応じた前記連結車両周辺の鳥瞰画像における表示領域を決定する
ことを特徴とする請求項3記載の連結車両用鳥瞰図表示システム。 - 前記トラクタカメラが、前記トラクタの左右側部にそれぞれ設けられ前記トラクタの左右側方を撮像するトラクタ側方カメラからなり、
前記トレーラカメラが、前記トレーラの左右側部にそれぞれ設けられ前記トレーラの左右側方を撮像するトレーラ側方カメラからなる
ことを特徴とする請求項1〜4の何れか1項に記載の連結車両用鳥瞰図表示システム。 - 前記トラクタカメラが、前記トラクタの左右側部にそれぞれ設けられ前記トラクタの左右側方を撮像するトラクタ側方カメラと、前記トラクタの前部に設けられ前記トラクタの前方を撮像するトラクタ前方カメラからなり、
前記トレーラカメラが、前記トレーラの左右側部にそれぞれ設けられ前記トレーラの左右側方を撮像するトレーラ側方カメラと、前記トレーラの後部に設けられ前記トレーラの後方を撮像するトレーラ後方カメラからなる
ことを特徴とする請求項1〜4の何れか1項に記載の連結車両用鳥瞰図表示システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253242A JP2012105158A (ja) | 2010-11-11 | 2010-11-11 | 連結車両用鳥瞰図表示システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010253242A JP2012105158A (ja) | 2010-11-11 | 2010-11-11 | 連結車両用鳥瞰図表示システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012105158A true JP2012105158A (ja) | 2012-05-31 |
Family
ID=46395029
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010253242A Withdrawn JP2012105158A (ja) | 2010-11-11 | 2010-11-11 | 連結車両用鳥瞰図表示システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012105158A (ja) |
Cited By (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015154406A (ja) * | 2014-02-18 | 2015-08-24 | クラリオン株式会社 | 牽引車用周囲監視装置 |
| WO2016024444A1 (ja) * | 2014-08-12 | 2016-02-18 | ソニー株式会社 | 信号処理装置と信号処理方法およびモニタリングシステム |
| US9290202B2 (en) | 2011-04-19 | 2016-03-22 | Ford Global Technologies, Llc | System and method of calibrating a trailer backup assist system |
| DE102014218995A1 (de) | 2014-09-22 | 2016-03-24 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bird-View-Darstellung eines Fahrzeuggespanns sowie nachrüstbare Kamera |
| US9315212B1 (en) | 2014-10-13 | 2016-04-19 | Ford Global Technologies, Llc | Trailer sensor module and associated method of wireless trailer identification and motion estimation |
| US9335163B2 (en) | 2011-04-19 | 2016-05-10 | Ford Global Technologies, Llc | Trailer length estimation in hitch angle applications |
| US9340228B2 (en) | 2014-10-13 | 2016-05-17 | Ford Global Technologies, Llc | Trailer motion and parameter estimation system |
| US9346396B2 (en) | 2011-04-19 | 2016-05-24 | Ford Global Technologies, Llc | Supplemental vehicle lighting system for vision based target detection |
| JP2016119526A (ja) * | 2014-12-19 | 2016-06-30 | アルパイン株式会社 | 牽引車両周囲画像生成装置および牽引車両周囲画像生成方法 |
| EP3048012A1 (en) * | 2015-01-21 | 2016-07-27 | Caterpillar Inc. | Vision system and method of monitoring surroundings of machine |
| US9434414B2 (en) | 2011-04-19 | 2016-09-06 | Ford Global Technologies, Llc | System and method for determining a hitch angle offset |
| US9513103B2 (en) | 2011-04-19 | 2016-12-06 | Ford Global Technologies, Llc | Hitch angle sensor assembly |
| US9517668B2 (en) | 2014-07-28 | 2016-12-13 | Ford Global Technologies, Llc | Hitch angle warning system and method |
| US9522699B2 (en) | 2015-02-05 | 2016-12-20 | Ford Global Technologies, Llc | Trailer backup assist system with adaptive steering angle limits |
| US9533683B2 (en) | 2014-12-05 | 2017-01-03 | Ford Global Technologies, Llc | Sensor failure mitigation system and mode management |
| US9555832B2 (en) | 2011-04-19 | 2017-01-31 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| WO2017020898A1 (de) * | 2015-07-31 | 2017-02-09 | Conti Temic Microelectronic Gmbh | Verfahren und vorrichtung zum anzeigen einer umgebungsszene eines fahrzeuggespanns |
| US9566911B2 (en) | 2007-03-21 | 2017-02-14 | Ford Global Technologies, Llc | Vehicle trailer angle detection system and method |
| US9607242B2 (en) | 2015-01-16 | 2017-03-28 | Ford Global Technologies, Llc | Target monitoring system with lens cleaning device |
| US9610975B1 (en) | 2015-12-17 | 2017-04-04 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system |
| US9616923B2 (en) | 2015-03-03 | 2017-04-11 | Ford Global Technologies, Llc | Topographical integration for trailer backup assist system |
| US9683848B2 (en) | 2011-04-19 | 2017-06-20 | Ford Global Technologies, Llc | System for determining hitch angle |
| WO2017122294A1 (ja) * | 2016-01-13 | 2017-07-20 | 株式会社ソシオネクスト | 周囲監視装置、画像処理方法、及び画像処理プログラム |
| US9723274B2 (en) | 2011-04-19 | 2017-08-01 | Ford Global Technologies, Llc | System and method for adjusting an image capture setting |
| WO2017131243A1 (ja) * | 2017-02-09 | 2017-08-03 | 株式会社小松製作所 | 作業車両の周辺監視システム、作業車両、及び作業車両の周辺監視方法 |
| US9796228B2 (en) | 2015-12-17 | 2017-10-24 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system |
| US9798953B2 (en) | 2015-12-17 | 2017-10-24 | Ford Global Technologies, Llc | Template matching solution for locating trailer hitch point |
| US9804022B2 (en) | 2015-03-24 | 2017-10-31 | Ford Global Technologies, Llc | System and method for hitch angle detection |
| US9827818B2 (en) | 2015-12-17 | 2017-11-28 | Ford Global Technologies, Llc | Multi-stage solution for trailer hitch angle initialization |
| US9836060B2 (en) | 2015-10-28 | 2017-12-05 | Ford Global Technologies, Llc | Trailer backup assist system with target management |
| US9854209B2 (en) | 2011-04-19 | 2017-12-26 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US9926008B2 (en) | 2011-04-19 | 2018-03-27 | Ford Global Technologies, Llc | Trailer backup assist system with waypoint selection |
| US9934572B2 (en) | 2015-12-17 | 2018-04-03 | Ford Global Technologies, Llc | Drawbar scan solution for locating trailer hitch point |
| US9937953B2 (en) | 2011-04-19 | 2018-04-10 | Ford Global Technologies, Llc | Trailer backup offset determination |
| US9963004B2 (en) | 2014-07-28 | 2018-05-08 | Ford Global Technologies, Llc | Trailer sway warning system and method |
| WO2018108211A1 (de) * | 2016-12-14 | 2018-06-21 | Conti Temic Microelectronic Gmbh | Dreidimensionales rundumsichtsystem |
| US10005492B2 (en) | 2016-02-18 | 2018-06-26 | Ford Global Technologies, Llc | Trailer length and hitch angle bias estimation |
| JP2018101860A (ja) * | 2016-12-19 | 2018-06-28 | 株式会社クボタ | 作業車 |
| US10011228B2 (en) | 2015-12-17 | 2018-07-03 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system using multiple imaging devices |
| US10017115B2 (en) | 2015-11-11 | 2018-07-10 | Ford Global Technologies, Llc | Trailer monitoring system and method |
| US10046800B2 (en) | 2016-08-10 | 2018-08-14 | Ford Global Technologies, Llc | Trailer wheel targetless trailer angle detection |
| KR101894204B1 (ko) * | 2018-03-02 | 2018-08-31 | 주식회사 아이엔티코리아 | 실시간 컨테이너 트럭 모니터링 방법 및 시스템 |
| US10106193B2 (en) | 2016-07-01 | 2018-10-23 | Ford Global Technologies, Llc | Enhanced yaw rate trailer angle detection initialization |
| US10155478B2 (en) | 2015-12-17 | 2018-12-18 | Ford Global Technologies, Llc | Centerline method for trailer hitch angle detection |
| US10222804B2 (en) | 2016-10-21 | 2019-03-05 | Ford Global Technologies, Llc | Inertial reference for TBA speed limiting |
| WO2019093176A1 (ja) * | 2017-11-07 | 2019-05-16 | アイシン精機株式会社 | 周辺監視装置 |
| JP2019075625A (ja) * | 2017-10-12 | 2019-05-16 | アイシン精機株式会社 | 周辺監視装置 |
| US10384607B2 (en) | 2015-10-19 | 2019-08-20 | Ford Global Technologies, Llc | Trailer backup assist system with hitch angle offset estimation |
| WO2020026836A1 (ja) * | 2018-07-30 | 2020-02-06 | 株式会社Jvcケンウッド | 俯瞰画像生成装置、俯瞰画像生成方法およびプログラム |
| US10611407B2 (en) | 2015-10-19 | 2020-04-07 | Ford Global Technologies, Llc | Speed control for motor vehicles |
| KR20200064014A (ko) * | 2018-11-28 | 2020-06-05 | 오토아이티(주) | 트레일러 트럭용 어라운드 뷰 영상 제공 장치 및 방법 |
| US10710585B2 (en) | 2017-09-01 | 2020-07-14 | Ford Global Technologies, Llc | Trailer backup assist system with predictive hitch angle functionality |
| JP2020150306A (ja) * | 2019-03-11 | 2020-09-17 | いすゞ自動車株式会社 | 表示制御装置 |
| US10829046B2 (en) | 2019-03-06 | 2020-11-10 | Ford Global Technologies, Llc | Trailer angle detection using end-to-end learning |
| CN112798009A (zh) * | 2020-12-24 | 2021-05-14 | 北京经纬恒润科技股份有限公司 | 远程驾驶辅助显示方法及装置 |
| CN113103956A (zh) * | 2020-01-13 | 2021-07-13 | 福特全球技术公司 | 360度挂车摄像机视图系统 |
| US11077795B2 (en) | 2018-11-26 | 2021-08-03 | Ford Global Technologies, Llc | Trailer angle detection using end-to-end learning |
| KR20220095415A (ko) * | 2020-12-30 | 2022-07-07 | 아진산업(주) | 길이 가변 트럭용 avm 영상 제공 장치 및 방법 |
| JP2022547068A (ja) * | 2019-09-04 | 2022-11-10 | コンチネンタル アドヴァンスド ライダー ソリューションズ ユーエス エルエルシー | トレーラ連結透視図 |
| DE102015105248B4 (de) | 2014-04-08 | 2023-09-28 | Bendix Commercial Vehicle Systems Llc | Verfahren und System zum Erzeugen eines Bildes der Umgebung eines Gelenkfahrzeugs |
| CN116823693A (zh) * | 2023-07-06 | 2023-09-29 | 雷达新能源汽车(浙江)有限公司 | 拖车视图成像方法、装置、设备及存储介质 |
-
2010
- 2010-11-11 JP JP2010253242A patent/JP2012105158A/ja not_active Withdrawn
Cited By (95)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9566911B2 (en) | 2007-03-21 | 2017-02-14 | Ford Global Technologies, Llc | Vehicle trailer angle detection system and method |
| US9971943B2 (en) | 2007-03-21 | 2018-05-15 | Ford Global Technologies, Llc | Vehicle trailer angle detection system and method |
| US9854209B2 (en) | 2011-04-19 | 2017-12-26 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US9683848B2 (en) | 2011-04-19 | 2017-06-20 | Ford Global Technologies, Llc | System for determining hitch angle |
| US9926008B2 (en) | 2011-04-19 | 2018-03-27 | Ford Global Technologies, Llc | Trailer backup assist system with waypoint selection |
| US9335163B2 (en) | 2011-04-19 | 2016-05-10 | Ford Global Technologies, Llc | Trailer length estimation in hitch angle applications |
| US11760414B2 (en) | 2011-04-19 | 2023-09-19 | Ford Global Technologies, Llp | Trailer backup offset determination |
| US9346396B2 (en) | 2011-04-19 | 2016-05-24 | Ford Global Technologies, Llc | Supplemental vehicle lighting system for vision based target detection |
| US9937953B2 (en) | 2011-04-19 | 2018-04-10 | Ford Global Technologies, Llc | Trailer backup offset determination |
| US10609340B2 (en) | 2011-04-19 | 2020-03-31 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US9434414B2 (en) | 2011-04-19 | 2016-09-06 | Ford Global Technologies, Llc | System and method for determining a hitch angle offset |
| US9513103B2 (en) | 2011-04-19 | 2016-12-06 | Ford Global Technologies, Llc | Hitch angle sensor assembly |
| US9723274B2 (en) | 2011-04-19 | 2017-08-01 | Ford Global Technologies, Llc | System and method for adjusting an image capture setting |
| US10471989B2 (en) | 2011-04-19 | 2019-11-12 | Ford Global Technologies, Llc | Trailer backup offset determination |
| US9290202B2 (en) | 2011-04-19 | 2016-03-22 | Ford Global Technologies, Llc | System and method of calibrating a trailer backup assist system |
| US9555832B2 (en) | 2011-04-19 | 2017-01-31 | Ford Global Technologies, Llc | Display system utilizing vehicle and trailer dynamics |
| US11267508B2 (en) | 2011-04-19 | 2022-03-08 | Ford Global Technologies, Llc | Trailer backup offset determination |
| JP2015154406A (ja) * | 2014-02-18 | 2015-08-24 | クラリオン株式会社 | 牽引車用周囲監視装置 |
| DE102015105248B4 (de) | 2014-04-08 | 2023-09-28 | Bendix Commercial Vehicle Systems Llc | Verfahren und System zum Erzeugen eines Bildes der Umgebung eines Gelenkfahrzeugs |
| US9963004B2 (en) | 2014-07-28 | 2018-05-08 | Ford Global Technologies, Llc | Trailer sway warning system and method |
| US9517668B2 (en) | 2014-07-28 | 2016-12-13 | Ford Global Technologies, Llc | Hitch angle warning system and method |
| JPWO2016024444A1 (ja) * | 2014-08-12 | 2017-05-25 | ソニー株式会社 | 信号処理装置と信号処理方法およびモニタリングシステム |
| US10632917B2 (en) | 2014-08-12 | 2020-04-28 | Sony Corporation | Signal processing device, signal processing method, and monitoring system |
| WO2016024444A1 (ja) * | 2014-08-12 | 2016-02-18 | ソニー株式会社 | 信号処理装置と信号処理方法およびモニタリングシステム |
| DE102014218995A1 (de) | 2014-09-22 | 2016-03-24 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bird-View-Darstellung eines Fahrzeuggespanns sowie nachrüstbare Kamera |
| US9315212B1 (en) | 2014-10-13 | 2016-04-19 | Ford Global Technologies, Llc | Trailer sensor module and associated method of wireless trailer identification and motion estimation |
| US9340228B2 (en) | 2014-10-13 | 2016-05-17 | Ford Global Technologies, Llc | Trailer motion and parameter estimation system |
| US9533683B2 (en) | 2014-12-05 | 2017-01-03 | Ford Global Technologies, Llc | Sensor failure mitigation system and mode management |
| JP2016119526A (ja) * | 2014-12-19 | 2016-06-30 | アルパイン株式会社 | 牽引車両周囲画像生成装置および牽引車両周囲画像生成方法 |
| US9607242B2 (en) | 2015-01-16 | 2017-03-28 | Ford Global Technologies, Llc | Target monitoring system with lens cleaning device |
| EP3048012A1 (en) * | 2015-01-21 | 2016-07-27 | Caterpillar Inc. | Vision system and method of monitoring surroundings of machine |
| US9667875B2 (en) | 2015-01-21 | 2017-05-30 | Caterpillar Inc. | Vision system and method of monitoring surroundings of machine |
| US9522699B2 (en) | 2015-02-05 | 2016-12-20 | Ford Global Technologies, Llc | Trailer backup assist system with adaptive steering angle limits |
| US9616923B2 (en) | 2015-03-03 | 2017-04-11 | Ford Global Technologies, Llc | Topographical integration for trailer backup assist system |
| US9804022B2 (en) | 2015-03-24 | 2017-10-31 | Ford Global Technologies, Llc | System and method for hitch angle detection |
| JP2021170826A (ja) * | 2015-07-31 | 2021-10-28 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 車両・被牽引車両コンビの周辺シーンを表示するための方法、並びに、装置 |
| JP7245295B2 (ja) | 2015-07-31 | 2023-03-23 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング | 車両・被牽引車両コンビの周辺シーンを表示するための方法、並びに、装置 |
| JP2018531530A (ja) * | 2015-07-31 | 2018-10-25 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 車両・被牽引車両コンビの周辺シーンを表示するための方法、並びに、装置 |
| US10434945B2 (en) | 2015-07-31 | 2019-10-08 | Conti Temic Microelectronic Gmbh | Method and device for displaying an image of the surroundings of a vehicle combination |
| WO2017020898A1 (de) * | 2015-07-31 | 2017-02-09 | Conti Temic Microelectronic Gmbh | Verfahren und vorrichtung zum anzeigen einer umgebungsszene eines fahrzeuggespanns |
| US10611407B2 (en) | 2015-10-19 | 2020-04-07 | Ford Global Technologies, Llc | Speed control for motor vehicles |
| US10384607B2 (en) | 2015-10-19 | 2019-08-20 | Ford Global Technologies, Llc | Trailer backup assist system with hitch angle offset estimation |
| US11440585B2 (en) | 2015-10-19 | 2022-09-13 | Ford Global Technologies, Llc | Speed control for motor vehicles |
| US9836060B2 (en) | 2015-10-28 | 2017-12-05 | Ford Global Technologies, Llc | Trailer backup assist system with target management |
| US10496101B2 (en) | 2015-10-28 | 2019-12-03 | Ford Global Technologies, Llc | Trailer backup assist system with multi-purpose camera in a side mirror assembly of a vehicle |
| US10017115B2 (en) | 2015-11-11 | 2018-07-10 | Ford Global Technologies, Llc | Trailer monitoring system and method |
| US10011228B2 (en) | 2015-12-17 | 2018-07-03 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system using multiple imaging devices |
| US10155478B2 (en) | 2015-12-17 | 2018-12-18 | Ford Global Technologies, Llc | Centerline method for trailer hitch angle detection |
| US9934572B2 (en) | 2015-12-17 | 2018-04-03 | Ford Global Technologies, Llc | Drawbar scan solution for locating trailer hitch point |
| US9827818B2 (en) | 2015-12-17 | 2017-11-28 | Ford Global Technologies, Llc | Multi-stage solution for trailer hitch angle initialization |
| US9798953B2 (en) | 2015-12-17 | 2017-10-24 | Ford Global Technologies, Llc | Template matching solution for locating trailer hitch point |
| US9796228B2 (en) | 2015-12-17 | 2017-10-24 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system |
| US9610975B1 (en) | 2015-12-17 | 2017-04-04 | Ford Global Technologies, Llc | Hitch angle detection for trailer backup assist system |
| JPWO2017122294A1 (ja) * | 2016-01-13 | 2018-11-08 | 株式会社ソシオネクスト | 周囲監視装置、画像処理方法、及び画像処理プログラム |
| US10721442B2 (en) | 2016-01-13 | 2020-07-21 | Socionext Inc. | Surround view monitor apparatus |
| WO2017122294A1 (ja) * | 2016-01-13 | 2017-07-20 | 株式会社ソシオネクスト | 周囲監視装置、画像処理方法、及び画像処理プログラム |
| US10005492B2 (en) | 2016-02-18 | 2018-06-26 | Ford Global Technologies, Llc | Trailer length and hitch angle bias estimation |
| US10106193B2 (en) | 2016-07-01 | 2018-10-23 | Ford Global Technologies, Llc | Enhanced yaw rate trailer angle detection initialization |
| US10046800B2 (en) | 2016-08-10 | 2018-08-14 | Ford Global Technologies, Llc | Trailer wheel targetless trailer angle detection |
| US10807639B2 (en) | 2016-08-10 | 2020-10-20 | Ford Global Technologies, Llc | Trailer wheel targetless trailer angle detection |
| US10222804B2 (en) | 2016-10-21 | 2019-03-05 | Ford Global Technologies, Llc | Inertial reference for TBA speed limiting |
| JP2020513701A (ja) * | 2016-12-14 | 2020-05-14 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツングConti Temic microelectronic GmbH | 三次元サラウンドビュー・システム |
| WO2018108211A1 (de) * | 2016-12-14 | 2018-06-21 | Conti Temic Microelectronic Gmbh | Dreidimensionales rundumsichtsystem |
| JP7084400B2 (ja) | 2016-12-14 | 2022-06-14 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング | 三次元サラウンドビュー・システム |
| JP2018101860A (ja) * | 2016-12-19 | 2018-06-28 | 株式会社クボタ | 作業車 |
| US10421400B2 (en) | 2017-02-09 | 2019-09-24 | Komatsu Ltd. | Surroundings monitoring system for work vehicle, work vehicle, and surroundings monitoring method for work vehicle |
| JP6251453B1 (ja) * | 2017-02-09 | 2017-12-20 | 株式会社小松製作所 | 作業車両の周辺監視システム、作業車両、及び作業車両の周辺監視方法 |
| WO2017131243A1 (ja) * | 2017-02-09 | 2017-08-03 | 株式会社小松製作所 | 作業車両の周辺監視システム、作業車両、及び作業車両の周辺監視方法 |
| US10710585B2 (en) | 2017-09-01 | 2020-07-14 | Ford Global Technologies, Llc | Trailer backup assist system with predictive hitch angle functionality |
| JP2019075625A (ja) * | 2017-10-12 | 2019-05-16 | アイシン精機株式会社 | 周辺監視装置 |
| JP7110577B2 (ja) | 2017-10-12 | 2022-08-02 | 株式会社アイシン | 周辺監視装置 |
| WO2019093176A1 (ja) * | 2017-11-07 | 2019-05-16 | アイシン精機株式会社 | 周辺監視装置 |
| JP2019087875A (ja) * | 2017-11-07 | 2019-06-06 | アイシン精機株式会社 | 周辺監視装置 |
| KR101894204B1 (ko) * | 2018-03-02 | 2018-08-31 | 주식회사 아이엔티코리아 | 실시간 컨테이너 트럭 모니터링 방법 및 시스템 |
| WO2020026836A1 (ja) * | 2018-07-30 | 2020-02-06 | 株式会社Jvcケンウッド | 俯瞰画像生成装置、俯瞰画像生成方法およびプログラム |
| US11498484B2 (en) | 2018-07-30 | 2022-11-15 | Jvckenwood Corporation | Overhead image generation device, overhead image generation method, and program |
| CN112470465B (zh) * | 2018-07-30 | 2023-09-29 | Jvc建伍株式会社 | 俯瞰图像生成装置以及计算机可读存储介质 |
| CN112470465A (zh) * | 2018-07-30 | 2021-03-09 | Jvc建伍株式会社 | 俯瞰图像生成装置、俯瞰图像生成方法以及程序 |
| JP2020021980A (ja) * | 2018-07-30 | 2020-02-06 | 株式会社Jvcケンウッド | 俯瞰画像生成装置、俯瞰画像生成方法およびプログラム |
| JP7180172B2 (ja) | 2018-07-30 | 2022-11-30 | 株式会社Jvcケンウッド | 俯瞰画像生成装置、俯瞰画像生成方法およびプログラム |
| US11077795B2 (en) | 2018-11-26 | 2021-08-03 | Ford Global Technologies, Llc | Trailer angle detection using end-to-end learning |
| KR102232276B1 (ko) * | 2018-11-28 | 2021-03-25 | 오토아이티(주) | 트레일러 트럭용 어라운드 뷰 영상 제공 장치 및 방법 |
| KR20200064014A (ko) * | 2018-11-28 | 2020-06-05 | 오토아이티(주) | 트레일러 트럭용 어라운드 뷰 영상 제공 장치 및 방법 |
| US10829046B2 (en) | 2019-03-06 | 2020-11-10 | Ford Global Technologies, Llc | Trailer angle detection using end-to-end learning |
| JP2020150306A (ja) * | 2019-03-11 | 2020-09-17 | いすゞ自動車株式会社 | 表示制御装置 |
| JP7172757B2 (ja) | 2019-03-11 | 2022-11-16 | いすゞ自動車株式会社 | 表示制御装置 |
| US12214725B2 (en) | 2019-09-04 | 2025-02-04 | Continental Autonomous Mobility US, LLC | Transparent trailer articulation view |
| JP2022547068A (ja) * | 2019-09-04 | 2022-11-10 | コンチネンタル アドヴァンスド ライダー ソリューションズ ユーエス エルエルシー | トレーラ連結透視図 |
| JP7416918B2 (ja) | 2019-09-04 | 2024-01-17 | コンチネンタル アドヴァンスド ライダー ソリューションズ ユーエス エルエルシー | トレーラ連結透視図 |
| CN113103956A (zh) * | 2020-01-13 | 2021-07-13 | 福特全球技术公司 | 360度挂车摄像机视图系统 |
| CN112798009B (zh) * | 2020-12-24 | 2024-04-05 | 北京经纬恒润科技股份有限公司 | 远程驾驶辅助显示方法及装置 |
| CN112798009A (zh) * | 2020-12-24 | 2021-05-14 | 北京经纬恒润科技股份有限公司 | 远程驾驶辅助显示方法及装置 |
| KR102422585B1 (ko) | 2020-12-30 | 2022-07-20 | 아진산업(주) | 길이 가변 트럭용 avm 영상 제공 장치 및 방법 |
| KR20220095415A (ko) * | 2020-12-30 | 2022-07-07 | 아진산업(주) | 길이 가변 트럭용 avm 영상 제공 장치 및 방법 |
| CN116823693A (zh) * | 2023-07-06 | 2023-09-29 | 雷达新能源汽车(浙江)有限公司 | 拖车视图成像方法、装置、设备及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012105158A (ja) | 連結車両用鳥瞰図表示システム | |
| JP7245295B2 (ja) | 車両・被牽引車両コンビの周辺シーンを表示するための方法、並びに、装置 | |
| JP5884439B2 (ja) | 車両周辺監視用画像生成装置 | |
| JP5444338B2 (ja) | 車両周囲監視装置 | |
| JP5439890B2 (ja) | 画像処理方法、画像処理装置及びプログラム | |
| CN103988499B (zh) | 车辆周边监视装置 | |
| JP5455124B2 (ja) | カメラ姿勢パラメータ推定装置 | |
| JP2018531530A6 (ja) | 車両・被牽引車両コンビの周辺シーンを表示するための方法、並びに、装置 | |
| CN105472317B (zh) | 周边监视装置及周边监视系统 | |
| JP4193886B2 (ja) | 画像表示装置 | |
| JP2018531530A5 (ja) | ||
| JP5516998B2 (ja) | 画像生成装置 | |
| JP5870608B2 (ja) | 画像生成装置 | |
| JP2013110712A5 (ja) | ||
| US20170352176A1 (en) | Image processing device for vehicle | |
| JP2008172535A (ja) | 運転支援システム、画像処理装置及びずれ検出方法 | |
| WO2001058164A1 (en) | Vicinity display for car | |
| JP2008077628A (ja) | 画像処理装置並びに車両周辺視界支援装置及び方法 | |
| JP2007274377A (ja) | 周辺監視装置、プログラム | |
| JP7039879B2 (ja) | 表示制御装置 | |
| JP6471522B2 (ja) | カメラパラメータ調整装置 | |
| JP6614754B2 (ja) | 車両上に配置された全方向カメラからの全方向画像をレクティリニア画像に変換する方法 | |
| CN112184545A (zh) | 车载环视图生成方法、装置及系统 | |
| JP2018528514A (ja) | 後方交差交通のクイックルック | |
| JP4855884B2 (ja) | 車両周辺監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140204 |