JP2012105444A - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP2012105444A JP2012105444A JP2010251652A JP2010251652A JP2012105444A JP 2012105444 A JP2012105444 A JP 2012105444A JP 2010251652 A JP2010251652 A JP 2010251652A JP 2010251652 A JP2010251652 A JP 2010251652A JP 2012105444 A JP2012105444 A JP 2012105444A
- Authority
- JP
- Japan
- Prior art keywords
- field
- armature
- linear motion
- winding
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Permanent Magnet Type Synchronous Machine (AREA)
Abstract
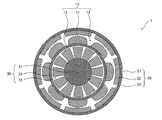
【解決手段】円周方向に沿って極性が交互となるように等間隔に配置された複数の磁極11を有する界磁10と、界磁10の径方向外側において同軸状に対向して配置され、円周方向に沿った推進力を発生するための複数の回転用巻線22を有する回転用電機子20と、界磁10の径方向内側において同軸状に対向して配置され、軸方向に沿った推進力を発生するための複数の直動用巻線32を有する直動用電機子30とを備えることにより、回転動作に用いられる界磁と直動動作に用いられる界磁とを界磁10として共通化する。
【選択図】図1
Description
上記実施形態では、界磁10の径方向外側に回転用電機子20を配置し、径方向内側に直動用電機子30を配置した場合について説明したが、反対に、界磁10の径方向外側に直動用電機子30を配置し、径方向内側に回転用電機子20を配置した構成としてもよい。
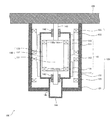
以上では、モータの出力軸となる直動用巻線固定体31又は回転用巻線固定体21を中実構造としたが、これらを中空構造としてもよい。図6は、本変形例のモータの概略構成を表す図1中II−II断面相当の横断面図である。なお、図6は上記図4に対応しており、同様の部分には同符号を付し説明を省略する。
図7は、本変形例のモータの構成を概念的に表す図1中II−II断面相当の横断面図である。なお、図7は上記図6に対応しており、同様の部分には同符号を付し説明を省略する。図7に示すように、本変形例モータ1Cにおいては、回転用電機子20の回転用巻線22は、樹脂成型により固定されており(固定樹脂を符号43で示す)、また直動用電機子30の直動用巻線32も同様に、樹脂成型により固定されている(固定樹脂を符号44で示す)。
上記実施形態では、回転用電機子20を固定子とし、界磁10及び直動用電機子30を可動子とする場合を説明したが、これに限らない。例えば、回転用電機子20及び直動用電機子30の両方を固定子とし、界磁10のみを可動子としてもよい。
上記実施形態では、回転用電機子20の回転用巻線列23及び界磁10の磁極列12を2列、直動用電機子30の直動用巻線列33を1列に配置した場合を説明したが、これに限らず、回転用巻線列23及び磁極列12を偶数列(2n列:nは自然数)、直動用電機子30の直動用巻線列33を上記偶数の半分の列数(n列:nは自然数)となるように配置してもよい。この場合でも、各直動用巻線32の短辺部32aに磁極11を効率良く対向させることができ、界磁10と直動用電機子30との間に軸方向に沿って高い推進力を得ることができる。
1A モータ
1B モータ
1C モータ
1D モータ
10 界磁
11 磁極
12 磁極列
13 磁石固定部材
20 回転用電機子
22 回転用巻線
23 回転用巻線列
24 回転用巻線固定体(巻線固定体)
30 直動用電機子
32 直動用巻線
33 直動用巻線列
100 モータ
110 界磁
111 磁極
112 磁極列
113 磁石固定部材
120 回転用電機子
122 回転用巻線
123 回転用巻線列
130 直動用電機子
132 直動用巻線
133 直動用巻線列
Claims (8)
- 円周方向に沿って配置された複数の磁極を有する界磁と、
前記界磁の径方向一方側において同軸状に対向して配置され、前記円周方向に沿った推進力を発生するための複数の回転用巻線を有する回転用電機子と、
前記界磁の径方向他方側において同軸状に対向して配置され、軸方向に沿った推進力を発生するための複数の直動用巻線を有する直動用電機子と、を備え、
前記界磁、前記回転用電機子、及び前記直動用電機子のうちのいずれかを固定子、他を可動子とする
ことを特徴とするモータ。 - 前記回転用電機子は、
前記界磁の径方向外側において同軸状に対向して配置されており、
前記直動用電機子は、
前記界磁の径方向内側において同軸状に対向して配置されている
ことを特徴とする請求項1に記載のモータ。 - 前記回転用電機子は、
前記界磁の径方向内側において同軸状に対向して配置されており、
前記直動用電機子は、
前記界磁の径方向外側において同軸状に対向して配置されている
ことを特徴とする請求項1に記載のモータ。 - nを自然数とした場合に、前記界磁は、
前記円周方向に沿って配置された複数個の前記磁極からなる磁極列が前記軸方向に沿って2n列配置されて構成されており、
前記回転用電機子は、
前記円周方向に沿って配置された複数個の前記回転用巻線からなる回転用巻線列が前記軸方向に沿って2n列配置されて構成されており、
前記直動用電機子は、
前記円周方向に沿って配置された複数個の前記直動用巻線からなる直動用巻線列が前記軸方向に沿ってn列配置されて構成されている
ことを特徴とする請求項2又は3に記載のモータ。 - 前記界磁は、
前記複数の磁極として、複数の永久磁石を有している
ことを特徴とする請求項4に記載のモータ。 - 前記界磁は、
前記永久磁石を固定配置する磁石固定部材をさらに有し、
前記磁石固定部材は、
非磁性材料で構成されている
ことを特徴とする請求項5に記載のモータ。 - 前記界磁の径方向内側に配置される前記回転用電機子の前記回転用巻線又は前記直動用電機子の前記直動用巻線を固定配置するための巻線固定体をさらに備え、
前記巻線固定体は、中空構造である
ことを特徴とする請求項1乃至6のいずれか1項に記載のモータ。 - 前記回転用電機子は、
樹脂成型により固定された前記回転用巻線を有し、
前記直動用電機子は、
樹脂成型により固定された前記直動用巻線を有している
ことを特徴とする請求項1乃至7のいずれか1項に記載のモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010251652A JP5531920B2 (ja) | 2010-11-10 | 2010-11-10 | モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010251652A JP5531920B2 (ja) | 2010-11-10 | 2010-11-10 | モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012105444A true JP2012105444A (ja) | 2012-05-31 |
| JP5531920B2 JP5531920B2 (ja) | 2014-06-25 |
Family
ID=46395170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010251652A Expired - Fee Related JP5531920B2 (ja) | 2010-11-10 | 2010-11-10 | モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5531920B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102868271A (zh) * | 2012-09-28 | 2013-01-09 | 哈尔滨工业大学 | 双定子旋转直线电机 |
| WO2016129071A1 (ja) * | 2015-02-12 | 2016-08-18 | 株式会社日立製作所 | 電力変換装置および電気機器 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH053650A (ja) * | 1991-06-26 | 1993-01-08 | Yaskawa Electric Corp | 2自由度アクチユエータ |
| JPH0582998A (ja) * | 1991-05-17 | 1993-04-02 | Tokico Ltd | 部品取付装置 |
| JPH08126277A (ja) * | 1994-10-25 | 1996-05-17 | Sawafuji Electric Co Ltd | フラット回転機 |
| JPH09253967A (ja) * | 1996-03-15 | 1997-09-30 | Okuma Mach Works Ltd | Nc駆動アクチュエータ |
| JP2003319635A (ja) * | 2002-04-17 | 2003-11-07 | Hitachi Industrial Equipment Systems Co Ltd | 電動機 |
| JP2004364348A (ja) * | 2003-06-02 | 2004-12-24 | Yaskawa Electric Corp | θ−Xアクチュエータ |
| JP2007143385A (ja) * | 2005-10-21 | 2007-06-07 | Yaskawa Electric Corp | 直動回転アクチュエータおよびシステム |
| JP2010187505A (ja) * | 2009-02-13 | 2010-08-26 | Yaskawa Electric Corp | θZ軸リニアモータ |
-
2010
- 2010-11-10 JP JP2010251652A patent/JP5531920B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0582998A (ja) * | 1991-05-17 | 1993-04-02 | Tokico Ltd | 部品取付装置 |
| JPH053650A (ja) * | 1991-06-26 | 1993-01-08 | Yaskawa Electric Corp | 2自由度アクチユエータ |
| JPH08126277A (ja) * | 1994-10-25 | 1996-05-17 | Sawafuji Electric Co Ltd | フラット回転機 |
| JPH09253967A (ja) * | 1996-03-15 | 1997-09-30 | Okuma Mach Works Ltd | Nc駆動アクチュエータ |
| JP2003319635A (ja) * | 2002-04-17 | 2003-11-07 | Hitachi Industrial Equipment Systems Co Ltd | 電動機 |
| JP2004364348A (ja) * | 2003-06-02 | 2004-12-24 | Yaskawa Electric Corp | θ−Xアクチュエータ |
| JP2007143385A (ja) * | 2005-10-21 | 2007-06-07 | Yaskawa Electric Corp | 直動回転アクチュエータおよびシステム |
| JP2010187505A (ja) * | 2009-02-13 | 2010-08-26 | Yaskawa Electric Corp | θZ軸リニアモータ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102868271A (zh) * | 2012-09-28 | 2013-01-09 | 哈尔滨工业大学 | 双定子旋转直线电机 |
| WO2016129071A1 (ja) * | 2015-02-12 | 2016-08-18 | 株式会社日立製作所 | 電力変換装置および電気機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5531920B2 (ja) | 2014-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101819005B1 (ko) | 모터 | |
| TWI657645B (zh) | 線性馬達單元 | |
| US20160380496A1 (en) | Multi-tunnel electric motor/generator | |
| KR20110115077A (ko) | 직동 회전 엑츄에이터 | |
| JP2006311715A (ja) | リニア・ロータリ複合型モータ | |
| JP2006217771A (ja) | 永久磁石可動電機 | |
| JP2017212872A (ja) | 発電システム用の回転子組立体 | |
| JP5531920B2 (ja) | モータ | |
| US10103593B2 (en) | Linear motor | |
| JPWO2019008930A1 (ja) | ステータおよびモータ | |
| JP5226483B2 (ja) | リニアアクチュエータ | |
| JP2004236498A5 (ja) | ||
| JP5714871B2 (ja) | 電動モータ、および駆動装置 | |
| JP5520196B2 (ja) | アクチュエータ | |
| JP2010104093A (ja) | リニアアクチュエータ | |
| KR20170058627A (ko) | 전기 모터 | |
| JP2010141991A (ja) | 回転モーター | |
| JP2009194991A (ja) | リニアモータとアクチュエータ | |
| JP2010035296A (ja) | 円筒型リニアモータのマグネットスキュー構造 | |
| JP5412720B2 (ja) | 直動回転アクチュエータ | |
| JP5347218B2 (ja) | 大推力リニアモータユニット | |
| JP5991841B2 (ja) | 円筒型リニアモータ | |
| US11462981B2 (en) | Electric motor | |
| JPWO2008117654A1 (ja) | 小型回転モータ及びこれを利用したX−θアクチュエータ | |
| CN211089426U (zh) | 一种永磁体直线步进电机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121019 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20130705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140325 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140407 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5531920 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |