JP2012110160A - モータ装置 - Google Patents
モータ装置 Download PDFInfo
- Publication number
- JP2012110160A JP2012110160A JP2010258301A JP2010258301A JP2012110160A JP 2012110160 A JP2012110160 A JP 2012110160A JP 2010258301 A JP2010258301 A JP 2010258301A JP 2010258301 A JP2010258301 A JP 2010258301A JP 2012110160 A JP2012110160 A JP 2012110160A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- motor
- motor device
- shaft
- bearing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000002093 peripheral effect Effects 0.000 claims description 7
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 230000004323 axial length Effects 0.000 description 4
- 239000011295 pitch Substances 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 239000005357 flat glass Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images





Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
【解決手段】モータ装置10は、ブラシレスモータ部400と減速部500とから主に構成されている。そして、減速部500には、減速効率が高いハイポサイクロイド機構が用いられている。また、モータ部400により回転する回転軸40と、回転軸40の回転を減速して減速された回転を出力する出力軸530とは同軸状に配置されている。さらに、ロータ420には中空部が形成されており、この中空部内にバランスウェイト421Bおよびモータ部側軸受54が埋設されている。
【選択図】図1
Description
設ける必要がない。そのため、回転軸の軸線方向に偏平なモータ装置とすることができる。また、制御装置をモータ装置内に配置する場合でも、制御装置は形状設計および装置内での配置に自由度が高いとともに、薄型化が可能である。そのため、回転軸の軸線方向に偏平なモータ装置とすることができる。
本発明のモータ装置の第1の実施形態について、図1に基づき説明する。図1は、第1の実施形態におけるモータ装置の軸線における縦断面図である。図1に示されるように、モータ装置10は、ハウジング20と、ハウジング20に直接的または間接的に設置されるブラシレスモータ部400、減速部500、回転軸40および出力軸530とを主に備える。そして、ハウジング20は、略円盤形状のハウジング本体部21を有し、モータ部400と減速部400500とはハウジング本体部21を挟んで互いに近接して配置されている。また、ハウジング20には、ハウジング本体部21の中央部にてモータ部400側に突出している円環状の第1の突出壁21A、ハウジング本体部21の外周部にてモータ部400側に突出している円環状の第2の突出壁21B、およびハウジング本体部21の径方向の中間部にて減速部500側に突出している円環状の第3の突出壁21Cが、それぞれ一体形成されている。また、第3の突出壁21Cの端部と有底円筒形状の第2のケース31との開口部が嵌合し、ハウジング本体部21、第3の突出壁21Cおよび第1のケース31により形成された空間内にモータ部400は配置される。
ブラシレスモータ部は、モータコイル413を有する略円環形状のステータ410と、ステータ410の内側に回転自在に配置されるロータ420と、ステータ410に備わるモータコイル413に制御電流を供給する制御基板430とを有する。ここで、制御基板430は、ハウジング本体部21と反対側に、ステータ410およびロータ420を挟んで、ステータ410およびロータ420に近接して配置される。また、ステータ410は、ハウジング20の第2の突出壁21Bの内壁に挿入固定されることにより、ハウジング20に取り付けられている。なお、ステータ410には、モータコイル413の絶縁性を確保するためにインシュレータ412がステータコア411に設けられている。
回転軸40は、略棒状に形成されており、一端部に円柱形状のモータ部側軸部42が、他端部にモータ部側軸部42と軸心を同一にする円柱形状の減速部側軸部43がそれぞれ形成されている。また、モータ部側軸部42と減速部側軸部43との間の中央部にモータ部側軸部42に対し偏心配置された円柱形状の偏心軸部42が形成されている。そして、回転軸40のモータ部側軸部42がロータ本体部421の中央部に形成された挿通孔421BCに嵌合固定され、回転軸40は、ロータ420の軸心40Rに対し同心状に配置され
る。すわわちすなわち、回転軸40の軸心40Sは、ロータ420の軸心40Rと同心状に配置される。また、回転軸40がロータ420の軸心40Rに対し同心状に配置されることにより、回転軸40に形成されている偏心軸部42は、ロータ420の軸心40Rおよび回転軸40の軸心40Sに対し、偏心長さL1ずれた位置に偏心して配置される。
次に、本実施形態のモータ装置10の回転軸40に嵌挿される第1の減速部側軸受51、揺動軸受(第1の軸受)53、およびモータ部側軸受54について説明する。なお、揺動部軸受(第1の軸受)53は、第1および第2の揺動軸受(53A、53B)より構成される。第1の減速部側軸受51は、回転軸40の減速部側軸部43の外壁に挿入される円環形状のカラー部材51Aの外壁に内輪が挿入され、カラー部材51Aを介して回転軸40の減速部側軸部43に嵌挿されている。第1および第2の揺動軸受(53A、53B)は、それぞれの内輪が回転軸40の偏心軸部42の外壁に挿入されることにより偏心軸部42の外壁に配置される。
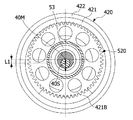
次に、図1に加え図2に基づき、本実施形態の減速部500について説明する。なお、図2は、図1において減速部の断面を表示するX−X断面図である。減速部500は、内周壁に複数の内歯510Aが形成されている円環形状の内歯歯車510と、外周壁の複数の外歯520Aが形成されるとともに、中央部に嵌合孔521が形成されている円盤形状の揺動外歯歯車520とを備えている。また、揺動外歯歯車520の外歯520Aの歯数、歯先円直径およびピッチ直径は、内歯歯車510の内歯510Aの歯数、歯先円直径およびピッチ直径よりも小さく設定されている。そして、揺動外歯歯車520は、内歯歯車510内において内歯歯車510の中心に対して偏心した位置に配置されることにより、揺動外歯歯車520の外歯520Aの一部が、内歯歯車510の内歯510Aに噛み合わされる。
とともに、揺動外歯歯車520の偏心位置は、揺動外歯歯車520の外歯520Aの一部が、内歯歯車510の内歯510Aに噛み合わされるよう設定されている。このような、内歯歯車510と揺動外歯歯車520とで構成される減速部50は、一般にハイポサイクロイド機構と呼ばれている。
モータ装置10は、回転軸40の軸心40Sに対し同心状に配置されるとともにハウジング20から突出する出力軸530と、減速部500の揺動外歯歯車520と連係し、揺動外歯歯車520の自転により出力軸530を回転させる連係手段700と、を備えている。
また、出力軸530は、出力軸530に一体的に形成されている円環形状の出力プレート部710の内壁および外壁が、それぞれ第1および第2の減速部側軸受(51,52)により回転自在に支持されることにより、軸支される。なお、第2の減速部側軸受52は、外輪が第3の突出壁21Cの端部に形成された段付き部に挿入されるとともに、第2のケース32により封止されている。
次に、図3および図4に基づき調整手段としてのバランスウェイト421Bについて説明する。図3は、本実施形態におけるロータの斜視図であるであり、図4は、本実施形態において、揺動外歯歯車とバランスウェイトの配置位置を説明する図である。
モータ装置10の作動は、まず、ステータ410に備わるモータコイル413に制御基板430から制御電流が供給されることにより、回転軸40に同心状に取り付けられているロータ420が回転動作する。回転軸40には、中央部に回転軸40の軸心40Rに対して偏心配置されている偏心軸部42が形成され、偏心軸部42には偏心軸受53を介して揺動外歯歯車520が回転自在に取り付けられている。このように偏心配置されている偏心軸部42に取り付けられている揺動歯車520は、回転軸40の回転により円環形状の内歯歯車510内において回転軸40の軸心40Rを中心として、交点半径L1にて公転運動をする。このとき、揺動外歯歯車520は、その外歯520Aの一部が周方向の一部において内歯歯車510の内歯510Aに噛み合うように設定している。また、外歯520Aの歯数は、内歯510Aの歯数に対して少ない歯数に設定されている。そのため、揺動外歯歯車520は、回転軸40の回転数と同じ回転数で公転するとともに、回転軸40の回転数に対し減速した回転数で自転する。そして、連係手段700を介して揺動外歯歯車520と出力軸530は連係されているため、回転軸40の回転数に対し減速した回転数により出力軸530は回転し、外部に対し回転出力を出力する。
上記のように作動するモータ装置10において、回転軸40の偏心軸部42の軸心40M上のそれぞれ同心状に配置される偏心軸部42、揺動軸受(第1の軸受)53および揺動外歯歯車520は、同心状に配置されるロータ420または回転軸40の軸心(40R,40S)に対して、偏心長さL1の長さを隔てて偏心配置される。そのため、ロータ420の回転により、長さL1の公転半径により公転運動する偏心軸部42、揺動軸受(第1の軸受)53および揺動外歯歯車520により、回転軸40に振れ回り力が与えられる。そこで、図4に示すように本実施形態においては、揺動外歯歯車520等による振れ回り力を相殺すべく、偏心軸部42の軸心40Mに対し、ロータ420の軸心40Rを挟んで反対の位置にバランスウェイト421Bを配置する構成としている。
次に、図5および図6に基づき本発明の第2の実施形態について説明する。図5は、本実施形態におけるロータの斜視図であり、図6は、本実施形態において、揺動外歯歯車とバランス孔との配置位置を説明する図である。
第2の実施形態におけるモータ装置100は、第1の実施形態におけるモータ装置10に比して、ロータ820の構造およびロータ820に設けられた調整手段821の揺動外歯歯車520に対する配置位置のみが異なる。従って、相違部分であるロータ820の構造および調整手段821の配置位置についてのみ説明し、その他の部分には同一の符号を付し、説明を終了する。
ている。従って、バランス孔821Bによるロータ420における質量の減分により、ロータ820の重心はロータ820の軸心40Rと異なる位置に配置される。
回転軸40の偏心軸部42の軸心40M上のそれぞれ同心状に配置される偏心軸部42、揺動軸受(第1の軸受)53および揺動外歯歯車520は、同心状に配置されるロータ420または回転軸40の軸心(40R,40S)に対して、偏心長さL1の長さを隔てて偏心配置される。そのため、ロータ420の回転により、長さL1の公転半径により公転運動する偏心軸部42、揺動軸受(第1の軸受)53および揺動外歯歯車520により、回転軸40に振れ回り力が与えられる。そこで、図6に示すように本実施形態においては、揺動外歯歯車520等による振れ回り力を相殺すべく、偏心軸部42の軸心40Mに対し、ロータ420の軸心40Rを挟んで反対の位置にバランス孔821Bを配置する構成としている。
Claims (6)
- モータコイルを有する略円環形状のステータと、略円盤形状のロータ本体部を有するとともに、前記ロータ本体部の外周面に配置されたマグネットを有し、前記ステータの内側に回転自在に配置されるロータと、を備えるブラシレスモータ部と、
前記ロータの軸心に対し同心状に配置され、一部に前記軸心に対し偏心して形成されている偏心軸部を有し、前記ロータの回転とともに回転する回転軸と、
複数の内歯を有する円環形状の内歯歯車と、第1の軸受を介して前記偏心軸部に回転自在に嵌合されるとともに前記内歯歯車の内側に配置され、周方向の一部において前記内歯歯車の内歯に噛み合わされる外歯を有する揺動外歯歯車と、を備える減速部と、
前記回転軸と同心状に配置された出力軸と、
前記揺動外歯歯車と前記出力軸とを連係し、前記揺動外歯歯車の自転により前記出力軸を回転させる連係手段と、を備えたモータ装置。 - 前記モータ装置は、略円盤形状のハウジング本体部を有するモータハウジングを備え、前記ブラシレスモータ部と、前記減速部とが前記ハウジング本体部を挟んで互いに近接して配置されていることを特徴とする請求項1に記載のモータ装置。
- 前記ロータのロータ本体部には、前記ハウジング本体部に向けて開口する凹部が形成されており、前記ブラシレスモータ装置は、前記回転軸を軸支する第2の軸受を備えるとともに、前記第2の軸受の少なくとも一部は、前記凹部内に埋設されていることを特徴とする請求項2に記載のモータ装置。
- 前記モータ装置において、前記ロータは、前記ロータの軸心に対し偏心配置される前記偏心軸部、前記第1の軸受および前記揺動外歯歯車により回転軸に与える振れ回り力を相殺する調整手段を有していることを特徴とする請求項3に記載のモータ装置。
- 前記調整手段は、前記ロータの凹部内に設けられたバランスウェイトであることを特徴とする請求項3に記載のモータ装置。
- 前記調整手段は、前記ロータのロータ本体部に形成されたバランス孔であることを特徴とする請求項3に記載のモータ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010258301A JP2012110160A (ja) | 2010-11-18 | 2010-11-18 | モータ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010258301A JP2012110160A (ja) | 2010-11-18 | 2010-11-18 | モータ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012110160A true JP2012110160A (ja) | 2012-06-07 |
Family
ID=46495138
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010258301A Pending JP2012110160A (ja) | 2010-11-18 | 2010-11-18 | モータ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012110160A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014052063A (ja) * | 2012-09-10 | 2014-03-20 | Jtekt Corp | 減速機及びこれを備えたモータ回転力伝達装置 |
| WO2014141432A1 (ja) * | 2013-03-14 | 2014-09-18 | 株式会社カワタテック | 送り構造体及びこれを備えた把持装置 |
| JP2014236524A (ja) * | 2013-05-30 | 2014-12-15 | 株式会社ミツバ | 電動モータおよび減速機付モータ |
| JP2018194151A (ja) * | 2017-05-22 | 2018-12-06 | Ntn株式会社 | 電動アクチュエータ |
| JP2019198191A (ja) * | 2018-05-10 | 2019-11-14 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP2019198190A (ja) * | 2018-05-10 | 2019-11-14 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| KR20220012092A (ko) * | 2020-07-22 | 2022-02-03 | 현대모비스 주식회사 | 모터 |
| CN116235388A (zh) * | 2020-09-24 | 2023-06-06 | 日本电产株式会社 | 摆线减速装置和电气设备 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003235211A (ja) * | 2002-02-04 | 2003-08-22 | Tamagawa Seiki Co Ltd | モータ構造 |
| JP2007237927A (ja) * | 2006-03-08 | 2007-09-20 | Ntn Corp | インホイールモータ駆動装置 |
-
2010
- 2010-11-18 JP JP2010258301A patent/JP2012110160A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003235211A (ja) * | 2002-02-04 | 2003-08-22 | Tamagawa Seiki Co Ltd | モータ構造 |
| JP2007237927A (ja) * | 2006-03-08 | 2007-09-20 | Ntn Corp | インホイールモータ駆動装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014052063A (ja) * | 2012-09-10 | 2014-03-20 | Jtekt Corp | 減速機及びこれを備えたモータ回転力伝達装置 |
| WO2014141432A1 (ja) * | 2013-03-14 | 2014-09-18 | 株式会社カワタテック | 送り構造体及びこれを備えた把持装置 |
| JP2014236524A (ja) * | 2013-05-30 | 2014-12-15 | 株式会社ミツバ | 電動モータおよび減速機付モータ |
| JP2018194151A (ja) * | 2017-05-22 | 2018-12-06 | Ntn株式会社 | 電動アクチュエータ |
| JP2019198191A (ja) * | 2018-05-10 | 2019-11-14 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP2019198190A (ja) * | 2018-05-10 | 2019-11-14 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP7087652B2 (ja) | 2018-05-10 | 2022-06-21 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP7183568B2 (ja) | 2018-05-10 | 2022-12-06 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| KR20220012092A (ko) * | 2020-07-22 | 2022-02-03 | 현대모비스 주식회사 | 모터 |
| KR102886532B1 (ko) * | 2020-07-22 | 2025-11-14 | 현대모비스 주식회사 | 모터 |
| CN116235388A (zh) * | 2020-09-24 | 2023-06-06 | 日本电产株式会社 | 摆线减速装置和电气设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012110160A (ja) | モータ装置 | |
| CN103298647B (zh) | 轮内马达驱动装置 | |
| WO2019077886A1 (ja) | 減速機構及び減速機付モータ | |
| CN109661528B (zh) | 带电动机的波动齿轮减速器 | |
| JP5388348B2 (ja) | ドラム回転装置 | |
| JP5348182B2 (ja) | 減速機付きモータ | |
| JP5714950B2 (ja) | 減速ギヤ、及び、減速ギヤを有する電気アクチュエータ | |
| US7354371B2 (en) | Motor-incorporated hypocycloid-type speed reducer | |
| JP2000120810A (ja) | モータ組み込み減速機 | |
| JP2012205441A (ja) | 減速機付きモータ装置 | |
| JPH0947003A (ja) | ブラシレス直流電動機 | |
| JP2013258795A (ja) | 減速機付きモータ | |
| CN109424701A (zh) | 减速器和带有减速器的电动机 | |
| JP4684255B2 (ja) | スタータ | |
| JP2019041438A (ja) | 減速機付モータ | |
| JP4163892B2 (ja) | ギアドブラシレスモータ | |
| JP2006304558A (ja) | モータ組込みハイポサイクロイド減速機 | |
| CN115582856A (zh) | 机器人及关节模组 | |
| CN111490630A (zh) | 减速器和带有减速器的电动机 | |
| JP2019035500A (ja) | 減速機及び減速機付きモータ | |
| JPH10336996A (ja) | 電動機 | |
| JP2004046023A (ja) | 回転電機による回転体駆動法 | |
| JP2007159287A (ja) | 車両用駆動装置の電動機支持機構 | |
| JP2006300273A (ja) | モータ組込みハイポサイクロイド減速機 | |
| JP2012225454A (ja) | 駆動ユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140514 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140722 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150203 |