JP2012113765A - 移動体システム - Google Patents
移動体システム Download PDFInfo
- Publication number
- JP2012113765A JP2012113765A JP2012065043A JP2012065043A JP2012113765A JP 2012113765 A JP2012113765 A JP 2012113765A JP 2012065043 A JP2012065043 A JP 2012065043A JP 2012065043 A JP2012065043 A JP 2012065043A JP 2012113765 A JP2012113765 A JP 2012113765A
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- distance
- travel route
- mirror surface
- mobile system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】移動体1に取り付けられ、所定の探索範囲に検出用光を走査して移動体と探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置7と、平板標識20の設置される位置を含む走行経路の地図情報を記憶する地図情報記憶手段と、距離方向検出装置の検出結果と地図情報記憶手段に記憶された地図情報とを照合して移動体の進行方向を決定する進行方向決定手段と、を有する移動体システムであって平板標識20に検出用光を拡散反射させる拡散反射面と検出用光を鏡面反射させる鏡面加工面とを設けて構成する。
【選択図】図1
Description
ところが、この方法では移動体をガイドレールに沿って確実に誘導することはできるが、ガイドレールを設置する作業が煩雑であり走行経路の変更が容易でないことや、ガイドレールに破損や汚れが生じやすく移動体の誘導精度が低下する、或いは、移動体の走行の自由度が制限されるなどの技術課題も生じていた。
そのため、最近では床等にガイドレール設置することなく自律走行可能な移動体が提案され実用化されつつある。
また、移動体の近傍(距離センサの計測可能な距離範囲内)に走行経路に沿って延びる側壁面がない場合でも移動体を正常に制御する技術として、特許文献2には、走行経路の近傍にレーザーを受ける受光平面を有する目標物(ランドマーク)を設置する技術が提案されている。
また、特許文献3には、移動体前方に設置した撮像部で進行方向を撮像し、撮像画像と予め撮影した参照画像のパターンマッチングを行い、ズレ量を逐次算出して移動体の走行方向を制御する制御方法が開示されている。
このため、目標物を設置する為のスペースを大きく確保する必要がある。このため、目標物を設置することによって移動体自身が走行する走行路が狭められる等の課題があった。
本発明は、予め設定された走行経路に応じて配置された平板標識と、前記走行経路に沿って自律走行する移動体と、を有する移動体システムであって、前記移動体に設けられ、所定の探索範囲に検出用光を走査することにより、前記移動体と前記探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置と、前記距離方向検出装置の検出結果に基づいて前記移動体の進行方向を決定する進行方向決定手段と、を有し、前記平板標識は、鏡面と、入射光を拡散反射する割合が当該鏡面よりも高い拡散反射面と、を含むことを特徴としている。
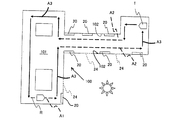
図1〜図7はいずれも本発明の一実施形態にかかる移動体システムを説明するものであり、図1は平板標識と移動体との構成を模式的に示す上面図、図2は移動体システムの全体構成を模式的に示す図、図3は移動体の概略構成を示す模式的な図、図4は駆動制御部の機能構成を示すブロック図、図5は平板標識を正面視で模式的に示す図、図6は平板標識を壁面に沿った方向からみた模式的な側面図、図7は距離センサによる距離計測用ランドマークの検出態様を示す模式図である。
なお、図2では説明を容易にするために走行経路Rや各区間A1〜A3を図示しているが、実際のフロア101等には走行経路Rや各区間A1〜A3を示すライン等は存在せず、各区間A1〜A3それぞれの境界についても厳密に規定されるものではない。
駆動部(走行装置)4は車輪(走行装置)5の駆動を制御するようになっており、前記駆動制御部3からの指令に従って前記車輪5を駆動することで前記移動体1の前進後退および姿勢角(操舵方向)を制御することができる。
前記撮像部6で撮像された画像は前記駆動制御部3に伝達される。ここで、撮像部6を進行方向に向けて設置しているのは、高速走行中でも撮像部の取得画像が乱れにくく、より安定した実画像を得ることができるためである。
移動体周囲の壁や柱といった構造物および歩行者など移動体の周囲の環境の距離を計測する。レーザー距離センサ7で計測された距離データは駆動制御部3に伝達される。
進行方向決定部31は、予め、記憶部33に記憶された地図情報と予めレーザー距離センサ7の検出結果とを照合して移動体1の位置を検出し、移動体1が走行経路Rに沿うように駆動部4に進行方向に関する信号を送信するようになっている。
なお、地図情報とは走行経路Rのフロア101位置座標とランドマーク20が設置される位置座標との情報を含んでいる。
また、記憶部33には予め走行経路R上の離散した地点である複数の教示地点のそれぞれにおいて撮像装置6の実画像の目標となる画像として取得した複数の教示画像が記憶されている。
画像誘導部32は、実画像と前記教示画像との比較結果に基づいて駆動部4を制御するようになっている。
以下、区間A1における移動体1の制御態様について説明する。図2に示すように区間A1は走行経路Rの前方にある窓24からの外光により、窓24に近づくほど走行経路Rの近傍の光環境の経時的な変化度合いが大きくなる。
区間A1では、レーザー距離センサ7がランドマーク20を検出するまでは、画像誘導部32により駆動部4を制御し、レーザー距離センサ7がランドマーク20を検出した後は、検出したランドマーク20の位置から予め設定されたオフセット地点(目標点)まで進行方向決定部31により駆動部4を制御するようになっている。
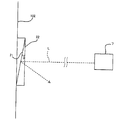
なお、ランドマーク20は、図1,図6に示すように、壁面102に貼り付けられており、光を鏡面反射(全反射)させる鏡面加工部21と光を拡散反射させる拡散反射面22とから構成されている。鏡面加工部21は拡散反射面22の両端に配設されており、水平方向と直交する面に対して所定の角度θだけ下向きに傾斜している。
また、拡散反射面22には、画像誘導部32よる制御を行なう際に画像の特徴点となる図柄23が設けられている。なお図中Lは、レーザー距離センサ7からの検出用光の照射方向を表わしている。
図1に示すように、レーザー距離センサ7から照射された検出用のレーザー光は、壁面102及び拡散反射面22では拡散的に反射されるため、レーザー距離センサ7が壁面102及び拡散反射面22に対して傾斜した位置にあっても、レーザー距離センサ7が壁面102及び拡散反射面22から反射した検出用光を検知して距離と方向とを検出することができる。
進行方向決定部31は、レーザー距離センサ7の検出結果から壁面102に取り付けられたランドマーク20の位置(方向)と距離とを求め、と記憶部33に記憶されている地図情報(ランドマークの形状)とを照合させて、自身の位置を地図情報上の走行経路Rに沿うように駆動部4に指令を与える。
次に、区間A2における移動体1の制御態様について説明する。
区間A2では走行経路R側方の窓24からの外光が多すぎるため、主として進行方向決定部31によって駆動部4を制御するようになっている。
図7に示すように平板状の距離計測用のランドマーク20が設置されているとすると、連続する計測角度において計測された距離が連続的に変化する領域を検索し、検索により抽出した距離計測用ランドマーク候補領域に対して最小自乗法により領域の直線性を評価して、平板であると判定した領域の両端の計測データから距離計測用ランドマーク基準点の位置および移動体1に対する距離計測用ランドマークの角度が求められる。距離計測用ランドマークの位置および角度の値と予め指定されている通過点指定位置h,vの値を用いて、移動体の現在地からの補正量が求まる。ここで、距離計測用ランドマークを精度良く計測するためには、移動体1を静止させて計測することが望ましい。
駆動制御部は補正量を基に移動体を駆動し、通過点指定位置に位置決めさせる。これにより経路を補正できるのである。
なお、区間A2におけるランドマーク20も区間A1のものと同様に構成されている。
また、走行経路Rにおいて、外光による撮像画像の変化が少ない場所(区間A3)では撮像画像と撮像用ランドマークのパターンマッチングが成功する確率が高く、撮像部のみを利用して走行経路上を走行することが可能である。一方、区間A1,A2では、外光等により光環境の変化に伴って同じ位置から同じ方向を撮像したとしても撮像装置6により取得される実画像の変化が大きい区間では、撮像画像と撮像用ランドマークのパターンマッチングが成功した特徴点の数が減少する。
なお、本実施形態ではランドマーク20の鏡面加工部21に傾斜θを設けたが、傾斜θについて省略してもよく、鏡面加工部21と拡散反射面22とが同一平面上になるように形成してもよい。このようにすればランドマーク20をさらに薄く形成することができる。
また、移動体1とランドマーク20とがわずかなにでも角度を持っていれば、鏡面反射部21からの反射光をレーザー距離センサ7で受光しにくく、鏡面加工部21とその他の拡散反射面との区別を精度良く行なうことができる。
2 車体
3 駆動制御部
4 駆動部
5 車輪
6 撮像部
7 レーザー距離センサ
20 ランドマーク(平板標識)
Claims (6)
- 予め設定された走行経路に応じて配置された平板標識と、前記走行経路に沿って自律走行する移動体と、を有する移動体システムであって、
前記移動体に設けられ、所定の探索範囲に検出用光を走査することにより、前記移動体と前記探索範囲内に存在する物体までの距離及び方向を検出する距離方向検出装置と、
前記距離方向検出装置の検出結果に基づいて前記移動体の進行方向を決定する進行方向決定手段と、を有し、
前記平板標識は、鏡面と、入射光を拡散反射する割合が当該鏡面よりも高い拡散反射面と、を含む、移動体システム。 - 前記鏡面は前記拡散反射面の両端側に配置されている
ことを特徴とする請求項1記載の移動体システム。 - 前記平板標識が前記探索範囲内に存在するときに前記鏡面から反射された前記検出用光を前記距離方向検出装置が受光しないように、前記鏡面の配置位置が決定されている
ことを特徴とする請求項1又は2記載の移動体システム。 - 前記距離方向検出装置は前記検出用光を水平方向に発信するように設定され、
前記鏡面は、前記水平方向と直交する面に対して所定の角度だけ傾斜している
ことを特徴とする請求項1〜3のいずれか1項に記載の移動体システム。 - 前記平板標識は前記走行経路中、前記移動体が直進する経路の末端部に前記直進する方向に対向するように設置されている
ことを特徴とする、請求項1〜4のいずれか1項に記載の移動体システム。 - 前記平板標識は前記走行経路を形成する壁面に取り付けられている
ことを特徴とする、請求項1〜5のいずれか1項に記載の移動体システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012065043A JP2012113765A (ja) | 2012-03-22 | 2012-03-22 | 移動体システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012065043A JP2012113765A (ja) | 2012-03-22 | 2012-03-22 | 移動体システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008315745A Division JP4962742B2 (ja) | 2008-12-11 | 2008-12-11 | 移動体システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012113765A true JP2012113765A (ja) | 2012-06-14 |
Family
ID=46497815
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012065043A Pending JP2012113765A (ja) | 2012-03-22 | 2012-03-22 | 移動体システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012113765A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016152004A (ja) * | 2015-02-19 | 2016-08-22 | Jfeスチール株式会社 | 自律移動ロボットの自己位置推定方法、自律移動ロボット、及び自己位置推定用ランドマーク |
| JP2016152003A (ja) * | 2015-02-19 | 2016-08-22 | Jfeスチール株式会社 | 自律移動ロボットの自己位置推定方法、自律移動ロボット、及び自己位置推定用ランドマーク |
| JP2018193726A (ja) * | 2017-05-15 | 2018-12-06 | 株式会社極東体育施設 | 敷設物または舗装物の切断装置及びその切断方法 |
| KR20250012092A (ko) | 2022-07-28 | 2025-01-23 | 가부시키가이샤 옥타 로보틱스 | 이동체 통행 관리 시스템, 및 이동체 통행 관리 방법 |
| KR20250168354A (ko) | 2023-04-26 | 2025-12-02 | 가부시키가이샤 옥타 로보틱스 | 이동체 통행 관리 시스템, 및 이동체 통행 관리 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60100810U (ja) * | 1983-12-15 | 1985-07-09 | 株式会社ダイフク | 移動車の走行位置検出用マ−クシ−ト |
| JPH07191744A (ja) * | 1993-12-24 | 1995-07-28 | Daifuku Co Ltd | 無人搬送車の位置同定方法 |
| JPH11271043A (ja) * | 1998-03-25 | 1999-10-05 | Sumitomo Heavy Ind Ltd | 移動体の位置計測装置 |
| JP2000099145A (ja) * | 1998-09-28 | 2000-04-07 | Meidensha Corp | 無人搬送車位置検出方式 |
| JP2002116023A (ja) * | 2000-10-06 | 2002-04-19 | Meidensha Corp | 無人搬送車の位置検出用反射板及び位置検出装置 |
| JP2006126974A (ja) * | 2004-10-26 | 2006-05-18 | Tohken Co Ltd | コード読取装置 |
-
2012
- 2012-03-22 JP JP2012065043A patent/JP2012113765A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60100810U (ja) * | 1983-12-15 | 1985-07-09 | 株式会社ダイフク | 移動車の走行位置検出用マ−クシ−ト |
| JPH07191744A (ja) * | 1993-12-24 | 1995-07-28 | Daifuku Co Ltd | 無人搬送車の位置同定方法 |
| JPH11271043A (ja) * | 1998-03-25 | 1999-10-05 | Sumitomo Heavy Ind Ltd | 移動体の位置計測装置 |
| JP2000099145A (ja) * | 1998-09-28 | 2000-04-07 | Meidensha Corp | 無人搬送車位置検出方式 |
| JP2002116023A (ja) * | 2000-10-06 | 2002-04-19 | Meidensha Corp | 無人搬送車の位置検出用反射板及び位置検出装置 |
| JP2006126974A (ja) * | 2004-10-26 | 2006-05-18 | Tohken Co Ltd | コード読取装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016152004A (ja) * | 2015-02-19 | 2016-08-22 | Jfeスチール株式会社 | 自律移動ロボットの自己位置推定方法、自律移動ロボット、及び自己位置推定用ランドマーク |
| JP2016152003A (ja) * | 2015-02-19 | 2016-08-22 | Jfeスチール株式会社 | 自律移動ロボットの自己位置推定方法、自律移動ロボット、及び自己位置推定用ランドマーク |
| JP2018193726A (ja) * | 2017-05-15 | 2018-12-06 | 株式会社極東体育施設 | 敷設物または舗装物の切断装置及びその切断方法 |
| KR20250012092A (ko) | 2022-07-28 | 2025-01-23 | 가부시키가이샤 옥타 로보틱스 | 이동체 통행 관리 시스템, 및 이동체 통행 관리 방법 |
| KR20250168354A (ko) | 2023-04-26 | 2025-12-02 | 가부시키가이샤 옥타 로보틱스 | 이동체 통행 관리 시스템, 및 이동체 통행 관리 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4962742B2 (ja) | 移動体システム | |
| CN105974922B (zh) | 一种巷道自动导引车、导引系统及其操作方法 | |
| CN103370669B (zh) | 用于无人驾驶的机动的车辆自主的定位的方法 | |
| CN108780317B (zh) | 自动搬运车 | |
| US8473141B2 (en) | Robot system | |
| KR101926322B1 (ko) | 차량 위치 추정 장치, 차량 위치 추정 방법 | |
| KR102022773B1 (ko) | 자율주행차량의 정밀위치감지 장치, 감지방법, 그 정밀위치감지장치를 통한 정차지원 시스템 및 정차지원방법 | |
| JP5218479B2 (ja) | 移動体システム | |
| CN206075134U (zh) | 一种巷道自动导引车和导引系统 | |
| JP5392700B2 (ja) | 障害物検出装置、及び障害物検出方法 | |
| WO1987007403A1 (fr) | Appareil de guidage pour des corps en mouvement sans equipage | |
| CN112449164B (zh) | 用于对车辆定位的方法以及用于执行该方法的车辆 | |
| JP2012113765A (ja) | 移動体システム | |
| JP2010086038A (ja) | 移動体の誘導システム及び誘導方法 | |
| JPH09128041A (ja) | 移動ロボットの誘導方法と誘導システム | |
| JP2020154470A (ja) | 自律移動装置、自律移動装置の移動制御方法および自律移動装置と搬送対象車との連結制御方法 | |
| JP3690211B2 (ja) | 自律移動台車及びその自己位置推定方法 | |
| JP3221247B2 (ja) | 無人搬送車 | |
| JP5024560B2 (ja) | 移動体 | |
| JP4760274B2 (ja) | 地図更新装置 | |
| US11151743B2 (en) | Method, system and apparatus for end of aisle detection | |
| JP7522531B2 (ja) | 走行制御システム | |
| JP2002108452A (ja) | 無人搬送車の走行制御装置 | |
| JP2010262461A (ja) | 移動体 | |
| JP2009244965A (ja) | 移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120402 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131015 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140305 |