JP2012128799A - 運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 - Google Patents
運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 Download PDFInfo
- Publication number
- JP2012128799A JP2012128799A JP2010282000A JP2010282000A JP2012128799A JP 2012128799 A JP2012128799 A JP 2012128799A JP 2010282000 A JP2010282000 A JP 2010282000A JP 2010282000 A JP2010282000 A JP 2010282000A JP 2012128799 A JP2012128799 A JP 2012128799A
- Authority
- JP
- Japan
- Prior art keywords
- driving
- vehicle
- driving scene
- transition
- action
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/164—Centralised systems, e.g. external to vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
Abstract
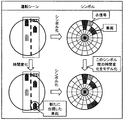
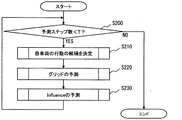
【解決手段】シンボル化実施部40が、運転シーンを構成する各情報をシンボル化して、自車両が置かれている運転シーン全体を記述する。このため、例えば交通参加者が増減しても、単にシンボル化される情報が増減するだけであり、交通参加者の増減に柔軟に対応できる。また、シンボル遷移予測部60は、自車両を含む各交通参加者の状態の変化に基づいて推定された、自車両の行動が交通参加者の行動に与えるInfluenceを用いて、シンボル化された運転シーンがどのように遷移するかを予測する。従って、運転シーンの遷移の予測において、大幅に演算量を低減しつつ、予測精度の向上も図ることができる。
【選択図】図1
Description
自車両が走行する走行環境に関する情報を取得する走行環境情報取得手段と、
自車両の周辺において、交通に参加している交通参加者を検出する交通参加者検出手段と、
自車両が置かれた運転シーンを、その運転シーンを構成する走行環境に関する情報、自車両の情報及び交通参加者の情報をシンボル化しつつ記述するシンボル化手段と、
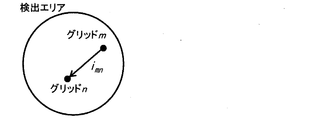
自車両を含む各交通参加者の状態の変化に基づいて、自車両の行動が交通参加者の行動に与える影響を相互作用として推定する相互作用推定手段と、
自車両が採りうる行動の候補に対して、相互作用推定手段によって推定された相互作用に基づき、シンボル化手段により各情報がシンボル化して記述された運転シーンが遷移する様子を予測する予測手段と、を備えることを特徴とする。

20 交通参加者情報取得部
30 自車両情報取得部
40 シンボル化実施部
50 相互作用推定部
60 シンボル遷移予測部
70 推奨操作生成・提示部
Claims (9)
- 自車両が走行する走行環境に関する情報を取得する走行環境情報取得手段と、
前記自車両の周辺において、交通に参加している交通参加者を検出する交通参加者検出手段と、
前記自車両が置かれた運転シーンを、その運転シーンを構成する前記走行環境に関する情報、前記自車両の情報及び前記交通参加者の情報をシンボル化しつつ記述するシンボル化手段と、
前記自車両を含む各交通参加者の状態の変化に基づいて、前記自車両の行動が前記交通参加者の行動に与える影響を相互作用として推定する相互作用推定手段と、
前記自車両が採りうる行動の候補に対して、前記相互作用推定手段によって推定された相互作用に基づき、前記シンボル化手段により各情報がシンボル化して記述された運転シーンが遷移する様子を予測する予測手段と、を備えることを特徴とする運転シーンの遷移予測装置。 - 前記シンボル化手段は、自車両の周囲に仮想のグリッドを定め、前記交通参加者検出手段によって検出された交通参加者を該当する位置のグリッドに当て嵌めることにより、各交通参加者の位置を表現しつつ、走行環境、自車両、及び交通参加者に関して、予め定められたシンボル化すべき情報を要素とするシンボルベクトルを用いて、前記運転シーンをシンボル化することを特徴とする請求項1に記載の運転シーンの遷移予測装置。
- 前記予測手段は、前記自車両が採りうる行動の候補として複数種類の行動を決定し、決定した各行動を起こしたときの運転シーンの遷移結果をそれぞれ予測し、さらに、予測した運転シーンの遷移結果において、前記自車両が採りうる行動の候補としての複数種類の行動を起こしたときの運転シーンの遷移結果を予測する処理を繰り返すことにより、時系列的に順番に行われる複数の行動からなる行動系列の各々に対して、前記運転シーンが遷移する様子を予測することを特徴とする請求項1又は2に記載の運転シーンの遷移予測装置。
- 前記予測手段は、前記走行環境情報取得手段によって取得された走行環境に関する情報に基づいて、前記自車両が採りうる行動の候補を決定することを特徴とする請求項1乃至3のいずれかに記載の運転シーンの遷移予測装置。
- 前記自車両の運転者に関する情報を取得する運転者情報取得手段を備え、
前記予測手段は、前記運転者情報取得手段によって取得された運転者に関する情報に基づいて、前記自車両が採りうる行動の候補を決定することを特徴とする請求項1乃至4のいずれかに記載の運転シーンの遷移予測装置。 - 前記運転者情報取得手段は、前記自車両の運転者が希望する運転行為に関する情報を取得する手段を含み、
前記予測手段は、前記自車両の運転者が希望する運転行為をなすために前記自車両が採りうる行動を、前記自車両が採りうる行動の候補として決定することを特徴とする請求項5に記載の運転シーンの遷移予測装置。 - 請求項1乃至6のいずれかに記載の運転シーンの遷移予測装置と、
前記運転シーンの遷移予測装置の予測手段による予測結果に基づいて、推奨すべき運転操作を決定し、前記自車両の運転者に提示する推奨運転操作提示手段と、を備えることを特徴とする車両用推奨運転操作提示装置。 - 前記推奨運転操作提示手段は、予め典型的な運転シーンを複数設定するとともに、各運転シーンに対して評価値を定めておき、予測された運転シーンの遷移結果と典型的な運転シーンとの類似度から、その予測された運転シーンの遷移結果の評価値を算出し、その評価値に基づいて、推奨すべき運転操作を決定することを特徴とする請求項7に記載の車両用推奨運転操作装置。
- 前記予測手段が、前記自車両が採りうる行動の候補として複数種類の行動を決定し、決定した各行動を起こしたときの運転シーンの遷移結果をそれぞれ予測し、さらに、予測した運転シーンの遷移結果において、前記自車両が採りうる行動の候補としての複数種類の行動を起こしたときの運転シーンの遷移結果を予測する処理を繰り返すことにより、時系列的に順番に行われる複数の行動からなる行動系列の各々に対して、前記運転シーンが遷移する様子を予測した場合に、前記推奨運転操作提示手段は、前記行動系列の各々により、最終的に遷移することが予測される運転シーンの評価値を算出するとともに、各々の行動系列に含まれる同時期の行動に関して、その行動を経て最終的に遷移した各運転シーンの評価値の平均値を算出し、その平均値が最大となる行動に従い、推奨すべき運転操作を決定することを特徴とする請求項8に記載の車両用推奨運転操作装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282000A JP5278419B2 (ja) | 2010-12-17 | 2010-12-17 | 運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 |
| US13/325,402 US8847786B2 (en) | 2010-12-17 | 2011-12-14 | Driving scene transition prediction device and recommended driving operation display device for motor vehicle |
| DE102011088738.5A DE102011088738B4 (de) | 2010-12-17 | 2011-12-15 | Kraftfahrzeuganzeigevorrichtung für empfohlenen Fahrbetrieb |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282000A JP5278419B2 (ja) | 2010-12-17 | 2010-12-17 | 運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012128799A true JP2012128799A (ja) | 2012-07-05 |
| JP5278419B2 JP5278419B2 (ja) | 2013-09-04 |
Family
ID=46233672
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010282000A Active JP5278419B2 (ja) | 2010-12-17 | 2010-12-17 | 運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8847786B2 (ja) |
| JP (1) | JP5278419B2 (ja) |
| DE (1) | DE102011088738B4 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015148545A (ja) * | 2014-02-07 | 2015-08-20 | 株式会社豊田中央研究所 | 車両制御装置及びプログラム |
| WO2017056224A1 (ja) * | 2015-09-30 | 2017-04-06 | 日産自動車株式会社 | 情報提示装置及び情報提示方法 |
| JP2018058588A (ja) * | 2013-10-30 | 2018-04-12 | 株式会社デンソー | 走行制御装置、サーバ、車載装置 |
| JP2019040244A (ja) * | 2017-08-22 | 2019-03-14 | 株式会社デンソー | 運転支援装置 |
| WO2021250819A1 (ja) * | 2020-06-10 | 2021-12-16 | 日本電信電話株式会社 | 環境遷移予測装置、環境遷移予測方法、及び環境遷移予測プログラム |
| WO2026069964A1 (ja) * | 2024-09-26 | 2026-04-02 | 株式会社日立製作所 | 運転支援装置、および、運転支援方法 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012101686A1 (de) * | 2012-03-01 | 2013-09-05 | Continental Teves Ag & Co. Ohg | Verfahren für ein Fahrerassistenzsystem zur autonomen Längs- und/oder Querregelung eines Fahrzeugs |
| US8705797B2 (en) * | 2012-03-07 | 2014-04-22 | GM Global Technology Operations LLC | Enhanced data association of fusion using weighted Bayesian filtering |
| JP2013242615A (ja) * | 2012-05-17 | 2013-12-05 | Denso Corp | 運転シーン遷移予測装置および車両用推奨運転操作提示装置 |
| DE102013214631B4 (de) * | 2013-07-26 | 2025-10-02 | Bayerische Motoren Werke Aktiengesellschaft | Effizientes Bereitstellen von Belegungsinformationen für das Umfeld eines Fahrzeugs |
| JP6358051B2 (ja) * | 2014-11-14 | 2018-07-18 | 株式会社デンソー | 遷移予測データ生成装置および遷移予測装置 |
| JP6519434B2 (ja) | 2015-10-08 | 2019-05-29 | 株式会社デンソー | 運転支援装置 |
| US9779629B2 (en) * | 2015-10-30 | 2017-10-03 | Honeywell International Inc. | Obstacle advisory system |
| US10486707B2 (en) * | 2016-01-06 | 2019-11-26 | GM Global Technology Operations LLC | Prediction of driver intent at intersection |
| JP2019114040A (ja) | 2017-12-22 | 2019-07-11 | 株式会社デンソー | 特性記憶装置 |
| CN111693060B (zh) * | 2020-06-08 | 2022-03-04 | 西安电子科技大学 | 基于拥塞等级预测分析的路径规划方法 |
| EP3985636B1 (en) * | 2020-10-16 | 2023-12-13 | Urban Software Institute GmbH | Computer system and method for determining reliable vehicle control instructions |
| JP2024042317A (ja) * | 2022-09-15 | 2024-03-28 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法、及び運転支援プログラム |
| CN115909733B (zh) * | 2022-11-11 | 2024-09-20 | 吉林大学 | 一种基于跨域感知与心智理论的驾驶意图预测方法 |
| CN118665529B (zh) * | 2024-05-30 | 2025-10-10 | 同济大学 | 一种基于场景矩阵的自动驾驶汽车决策控制方法 |
| CN118629217B (zh) * | 2024-08-14 | 2024-10-15 | 四川智慧高速科技有限公司 | 一种高速公路声音识别事故检测系统 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172994A (ja) * | 1998-12-03 | 2000-06-23 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2003228800A (ja) * | 2002-02-01 | 2003-08-15 | Nissan Motor Co Ltd | 車両用推奨操作量生成装置 |
| JP2006178674A (ja) * | 2004-12-21 | 2006-07-06 | Nissan Motor Co Ltd | 走行支援装置 |
| JP2006347252A (ja) * | 2005-06-14 | 2006-12-28 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2007176396A (ja) * | 2005-12-28 | 2007-07-12 | Univ Nagoya | 運転行動推定装置、運転支援装置、及び車両評価システム |
| JP2007333502A (ja) * | 2006-06-14 | 2007-12-27 | Nissan Motor Co Ltd | 合流支援装置及び合流支援方法 |
| JP2009508199A (ja) * | 2005-09-09 | 2009-02-26 | アンスティテュ ナスィヨナル ドゥ ラ ルシェルシュ アン アンフォルマティク エ アン オートマティク | 車両運転補助方法および改良型関連装置 |
| JP2009157499A (ja) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 運転支援装置及び運転支援システム |
| JP2009282783A (ja) * | 2008-05-22 | 2009-12-03 | Fuji Heavy Ind Ltd | リスク融合認識システム |
| JP2010198533A (ja) * | 2009-02-27 | 2010-09-09 | Nissan Motor Co Ltd | 路面情報提供装置及び路面状態判断方法 |
| WO2012014280A1 (ja) * | 2010-07-27 | 2012-02-02 | トヨタ自動車株式会社 | 運転支援装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6873911B2 (en) | 2002-02-01 | 2005-03-29 | Nissan Motor Co., Ltd. | Method and system for vehicle operator assistance improvement |
| US6643588B1 (en) * | 2002-04-11 | 2003-11-04 | Visteon Global Technologies, Inc. | Geometric based path prediction method using moving and stop objects |
| US6898528B2 (en) * | 2002-07-23 | 2005-05-24 | Ford Global Technologies, Llc | Collision and injury mitigation system using fuzzy cluster tracking |
| US7356408B2 (en) | 2003-10-17 | 2008-04-08 | Fuji Jukogyo Kabushiki Kaisha | Information display apparatus and information display method |
| JP3925488B2 (ja) * | 2003-11-11 | 2007-06-06 | 日産自動車株式会社 | 車両用画像処理装置 |
| DE102008013981B4 (de) | 2008-03-12 | 2015-01-15 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Dynamische Geschwindigkeitsinformationsanzeige und deren Migrationsstrategie |
-
2010
- 2010-12-17 JP JP2010282000A patent/JP5278419B2/ja active Active
-
2011
- 2011-12-14 US US13/325,402 patent/US8847786B2/en active Active
- 2011-12-15 DE DE102011088738.5A patent/DE102011088738B4/de active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172994A (ja) * | 1998-12-03 | 2000-06-23 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2003228800A (ja) * | 2002-02-01 | 2003-08-15 | Nissan Motor Co Ltd | 車両用推奨操作量生成装置 |
| JP2006178674A (ja) * | 2004-12-21 | 2006-07-06 | Nissan Motor Co Ltd | 走行支援装置 |
| JP2006347252A (ja) * | 2005-06-14 | 2006-12-28 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2009508199A (ja) * | 2005-09-09 | 2009-02-26 | アンスティテュ ナスィヨナル ドゥ ラ ルシェルシュ アン アンフォルマティク エ アン オートマティク | 車両運転補助方法および改良型関連装置 |
| JP2007176396A (ja) * | 2005-12-28 | 2007-07-12 | Univ Nagoya | 運転行動推定装置、運転支援装置、及び車両評価システム |
| JP2007333502A (ja) * | 2006-06-14 | 2007-12-27 | Nissan Motor Co Ltd | 合流支援装置及び合流支援方法 |
| JP2009157499A (ja) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 運転支援装置及び運転支援システム |
| JP2009282783A (ja) * | 2008-05-22 | 2009-12-03 | Fuji Heavy Ind Ltd | リスク融合認識システム |
| JP2010198533A (ja) * | 2009-02-27 | 2010-09-09 | Nissan Motor Co Ltd | 路面情報提供装置及び路面状態判断方法 |
| WO2012014280A1 (ja) * | 2010-07-27 | 2012-02-02 | トヨタ自動車株式会社 | 運転支援装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018058588A (ja) * | 2013-10-30 | 2018-04-12 | 株式会社デンソー | 走行制御装置、サーバ、車載装置 |
| JP2015148545A (ja) * | 2014-02-07 | 2015-08-20 | 株式会社豊田中央研究所 | 車両制御装置及びプログラム |
| WO2017056224A1 (ja) * | 2015-09-30 | 2017-04-06 | 日産自動車株式会社 | 情報提示装置及び情報提示方法 |
| JPWO2017056224A1 (ja) * | 2015-09-30 | 2018-08-16 | 日産自動車株式会社 | 情報提示装置及び情報提示方法 |
| US10538252B2 (en) | 2015-09-30 | 2020-01-21 | Nissan Motor Co., Ltd. | Information presenting device and information presenting method |
| JP2019040244A (ja) * | 2017-08-22 | 2019-03-14 | 株式会社デンソー | 運転支援装置 |
| JP7013722B2 (ja) | 2017-08-22 | 2022-02-01 | 株式会社デンソー | 運転支援装置 |
| WO2021250819A1 (ja) * | 2020-06-10 | 2021-12-16 | 日本電信電話株式会社 | 環境遷移予測装置、環境遷移予測方法、及び環境遷移予測プログラム |
| JPWO2021250819A1 (ja) * | 2020-06-10 | 2021-12-16 | ||
| JP7468644B2 (ja) | 2020-06-10 | 2024-04-16 | 日本電信電話株式会社 | 環境遷移予測装置、環境遷移予測方法、及び環境遷移予測プログラム |
| WO2026069964A1 (ja) * | 2024-09-26 | 2026-04-02 | 株式会社日立製作所 | 運転支援装置、および、運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011088738A1 (de) | 2012-06-21 |
| DE102011088738B4 (de) | 2022-12-22 |
| US8847786B2 (en) | 2014-09-30 |
| JP5278419B2 (ja) | 2013-09-04 |
| US20120154175A1 (en) | 2012-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5278419B2 (ja) | 運転シーンの遷移予測装置及び車両用推奨運転操作提示装置 | |
| CN115469650B (zh) | 用于控制自主机器避免潜在的未来碰撞的方法和系统 | |
| Song et al. | Surrounding vehicles’ lane change maneuver prediction and detection for intelligent vehicles: A comprehensive review | |
| JP6754856B2 (ja) | 自動運転車両のためのセンサー集約フレームワーク | |
| JP7542085B2 (ja) | 離脱予測とトリアージ支援のためのシステムと方法 | |
| CN112203916B (zh) | 用于确定自主车辆的车辆舒适性度量的方法和设备 | |
| US11810365B1 (en) | Perception error modeling | |
| JP6800575B2 (ja) | 自己の乗り物のドライバを支援する方法およびシステム | |
| CN114061581B (zh) | 通过相互重要性对自动驾驶车辆附近的智能体排名 | |
| JP6925796B2 (ja) | 車両を運転する際に当該車両の運転者を支援する方法及びシステム、車両、並びにコンピュータプログラム | |
| EP3032454B1 (en) | Method and system for adaptive ray based scene analysis of semantic traffic spaces and vehicle equipped with such system | |
| US10849543B2 (en) | Focus-based tagging of sensor data | |
| EP3232289A1 (en) | Information presentation control apparatus, autonomous vehicle, and autonomous-vehicle driving support system | |
| US10336252B2 (en) | Long term driving danger prediction system | |
| JP2013242615A (ja) | 運転シーン遷移予測装置および車両用推奨運転操作提示装置 | |
| CN115158309A (zh) | 使用上下文敏感融合的因素轨迹预测 | |
| JP2022513866A (ja) | 領域外コンテキストを用いたオブジェクト分類 | |
| US20170016734A1 (en) | Turn predictions | |
| US20250206354A1 (en) | Safe and scalable model for culturally sensitive driving by automated vehicles using a probabilistic architecture | |
| CN115115084B (zh) | 使用占用流场预测代理在环境中的未来移动 | |
| JP5895728B2 (ja) | 車群管理装置 | |
| CN110949380B (zh) | 用于动态对象的位置预测 | |
| JP4915874B2 (ja) | 運転支援装置 | |
| WO2023149003A1 (ja) | 車両制御装置 | |
| Michalke et al. | The narrow road assistant-next generation advanced driver assistance in inner-city |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130506 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5278419 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |