JP2012132777A - プローブ装置及びプローブ測定方法 - Google Patents
プローブ装置及びプローブ測定方法 Download PDFInfo
- Publication number
- JP2012132777A JP2012132777A JP2010284811A JP2010284811A JP2012132777A JP 2012132777 A JP2012132777 A JP 2012132777A JP 2010284811 A JP2010284811 A JP 2010284811A JP 2010284811 A JP2010284811 A JP 2010284811A JP 2012132777 A JP2012132777 A JP 2012132777A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- terminals
- measured
- unit
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Testing Of Individual Semiconductor Devices (AREA)
- Measuring Leads Or Probes (AREA)
- Tests Of Electronic Circuits (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Abstract
【解決手段】プローブ装置10は、複数端子を含むプローブ11、そのプローブ11を保持する保持部12、保持部12に設けられ、プローブ11に向かって光13aを照射する照射部13を含む。更に、プローブ装置10は、照射部13から照射される光13aによって被測定物20上に投影されるプローブ11の複数端子の影を含んだ像を取得する取得部14を含む。取得部14で取得される像から、プローブ11の各端子と被測定物20との位置関係が求められる。
【選択図】図1
Description
例えば、回路基板には、反りやうねりが生じている場合がある。この回路基板のように、比較的平坦でないものを被測定物とした場合には、プローブの各端子と被測定物との距離が、測定箇所によって変わり得る。そのため、測定箇所ごとに位置関係を求めないと、各端子を被測定物に一度で接触させることができず、いずれかの端子が被測定物と接触しないといった状況が起こり得る。プローブの端子に弾性を持たせ、全ての端子が被測定物に接触するまで、プローブを被測定物に押し当てる方法もある。しかし、この場合には、プローブの端子が測定前に行われる校正時とは異なる形状に変形し、また、1つのプローブ内に他の端子とは形状の異なる端子が出てくることで、適正な測定を行うことができないことがある。
図1及び図2に示すプローブ装置10は、プローブ11、保持部12、照射部13、及び取得部14を有している。
まず、第1の実施の形態について説明する。
プローブ110は、図3に示すように、プローブ筐体部111と、プローブ筐体部111から突出する端子部112を含む。
プローブ110は、ステージ等(図示せず)に載置された被測定物200に設けられた、被測定パッド部210に接近、接触され、被測定パッド部210からの信号を検出する。被測定パッド部210には、例えば、図4に示したように、プローブ110の端子112a,112b,112cの先端部に対応する位置に、被測定パッド210a,210b,210cが設けられている。プローブ110の端子部112は、端子112a,112b,112cが被測定パッド210a,210b,210cにそれぞれ接触可能な形状となるように、形成されている。
アーム回転部121は、アーム固定部122に軸支され、プローブ110の端子部112が突出する方向を軸にして、図3のθ方向に回転できるようになっている。プローブ110は、このアーム回転部121に固定されており、アーム回転部121と共に回転するようになっている。アーム部120のアーム固定部122及びアーム回転部121、並びにそれに保持されたプローブ110は、一体で、x,y方向(水平方向)及びz方向(鉛直方向)に移動できるようになっている。
信号処理部140は、プローブ110と電気的に接続される。信号処理部140は、例えば、プローブ110の端子112a,112b,112cによって被測定パッド210a,210b,210cから検出され、プローブ筐体部111を経て送られてくる信号を処理する。信号処理部140は、プローブ110から送られてくる信号を用い、例えば、電流、電圧、周波数、位相等、電気特性の測定処理を行う。信号処理部140には、例えば、オシロスコープ、アナライザ等、各種計測器を利用することができる。
上記のようなプローブ装置100を用いた、被測定物200のプローブ測定は、例えば、次のようにして行われる。
図8は平行度合わせの一例を説明する図である。尚、図8はプローブの端子部を含む平面図である。
上記の被測定物200として、プリント基板のような回路基板200Aを用いる場合、回路基板200Aには、反りやうねりといった変形が生じている場合がある。例えば、図9に示したように、回路基板200Aに反りが生じており、このように反った回路基板200Aの、異なる測定箇所201,202,203について、プローブ110を用いた測定を行う場合を想定する。尚、各測定箇所201,202,203に、被測定パッド210a,210b,210cが存在しているものとする。
例えば、上記図9の測定箇所201において、端子112aが被測定パッド210aに接触した後、更に、端子112b,112cが被測定パッド210b,210cに接触するまで、プローブ110をz方向に移動させる。これにより、図10に示すように、端子112a,112b,112cを全て、被測定パッド210a,210b,210cに接触させた状態を得ることができる。このとき、少なくとも端子112a,112bには、端子112cが被測定パッド210cに接触するまで押し当てられていることで、変形が生じる。
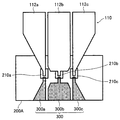
プローブ装置100では、上記図3に示したように、アーム部120の下側に照射部130が設けられており、この照射部130からプローブ110に向かって光131が照射される。照射部130から照射された光131は、プローブ110をその下側(裏側)から照らし、回路基板200A上には、その光131によって端子112a,112b,112cの影300が投影される。
例えば、取得部150で取得され、表示部160に表示される像に基づいて、プローブ110と回路基板200Aとの平行度を合わせる際は、影300a,300b,300cの位置、形状を見ながら、プローブ110をアーム回転部121によって回転させる。ここでは、端子112a,112b,112cの先端位置が揃ったプローブ110を使用しているが、図13に示すように、回路基板200A上の影300a,300b,300cの先端位置も揃うような角度まで、プローブ110を回転させる。このようにプローブ110を回転させることにより、プローブ110と回路基板200Aとの平行度を合わせることができる。
図14は第2の実施の形態に係るプローブ装置の一例を示す図である。
図14に示すプローブ装置100Bは、照射部130が、アーム部120の上側、即ちアーム部120の被測定物200と対向する側と反対の側に、設けられている。プローブ装置100Bでは、このようにアーム部120の上側に設けられた照射部130から、プローブ110に向かって、光131が照射される。
プローブ装置100Bでは、図14及び図15(C)に示したように、プローブ110をその上側から光131で照らす。そのため、図15(A)に示すように、各端子112a,112b,112cの影300a,300b,300cは、プローブ110の下とその先に延びるように、被測定物200上に投影されるようになる。このようにプローブ110の上側から光131を照射した場合にも、影300a,300b,300cは、図15(B)に示したような各端子112a,112b,112cと被測定物200との距離の違いを反映した位置、形状で、被測定物200上に投影される。
図16は第3の実施の形態に係るプローブの一例を示す図であって、(A)は平面図、(B)は正面図、(C)は側面図である。
まず、プローブ110Dを被測定物200に接近させたときに、最外端のダミー端子112dが最初に被測定物200に接触するような角度まで、プローブ110Dを回転させておく。即ち、プローブ110Dの端子112a,112b,112c及びダミー端子112dのうち、ダミー端子112dと被測定物200との距離が最も短くなるように、プローブ110Dを回転させておく。そして、プローブ110Dをx,y方向に移動させ、端子112a,112b,112c及びダミー端子112dを、被測定パッド210a,210b,210d及びダミーパッド210dの領域に移動させる。次いで、照射部130から光131を照射しながら、プローブ110Dをz方向に移動させ、被測定物200に接近、或いは接触させる。
(付記1) 複数の端子を含むプローブと、
前記プローブを保持する保持部と、
前記保持部に設けられ、前記プローブに向かって光を照射する照射部と、
前記光によって被測定物上に投影される前記複数の端子の影を含む像を取得する取得部と
を含むことを特徴とするプローブ装置。
(付記3) 前記保持部は、水平方向及び鉛直方向に移動可能であり、
前記照射部は、前記保持部の移動に連動することを特徴とする付記1又は2に記載のプローブ装置。
(付記5) 前記取得部は、前記被測定物上方からの前記像を取得することを特徴とする付記1乃至4のいずれかに記載のプローブ装置。
(付記7) 前記照射部は、平行光源を含むことを特徴とする付記1乃至6のいずれかに記載のプローブ装置。
(付記9) 前記複数の端子のうち、最外端の端子は、ダミー端子であることを特徴とする付記1乃至8のいずれかに記載のプローブ装置。
前記光によって被測定物上に投影される前記複数の端子の影を含む像を取得部によって取得する工程と
を含むことを特徴とするプローブ測定方法。
11,110,110D プローブ
11a,11b,11c,112a,112b,112c 端子
12 保持部
13,130 照射部
13a,131 光
14,150 取得部
20,200 被測定物
30,30a,30b,30c,300,300a,300b,300c,300d 影
111 プローブ筐体部
112 端子部
112d ダミー端子
113 点線
120 アーム部(保持部)
121 アーム回転部
122 アーム固定部
140 信号処理部
160 表示部
200A 回路基板(被測定物)
201,202,203 測定箇所
210 被測定パッド部
210a,210b,210c 被測定パッド
210d ダミーパッド
1000 基板
1001 傷
Claims (6)
- 複数の端子を含むプローブと、
前記プローブを保持する保持部と、
前記保持部に設けられ、前記プローブに向かって光を照射する照射部と、
前記光によって被測定物上に投影される前記複数の端子の影を含む像を取得する取得部と
を含むことを特徴とするプローブ装置。 - 前記保持部は、前記プローブを、該プローブの方向を軸にして回転させる回転部を含むことを特徴とする請求項1に記載のプローブ装置。
- 前記保持部は、水平方向及び鉛直方向に移動可能であり、
前記照射部は、前記保持部の移動に連動することを特徴とする請求項1又は2に記載のプローブ装置。 - 前記取得部は、前記被測定物上方からの前記像を取得することを特徴とする請求項1乃至3のいずれかに記載のプローブ装置。
- 前記取得部で取得された前記像を表示する表示部を更に含むことを特徴とする請求項1乃至4のいずれかに記載のプローブ装置。
- 複数の端子を含むプローブを保持する保持部に設けられた照射部から、前記プローブに向かって光を照射する工程と、
前記光によって被測定物上に投影される前記複数の端子の影を含む像を取得部によって取得する工程と
を含むことを特徴とするプローブ測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010284811A JP5750883B2 (ja) | 2010-12-21 | 2010-12-21 | プローブ装置及びプローブ測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010284811A JP5750883B2 (ja) | 2010-12-21 | 2010-12-21 | プローブ装置及びプローブ測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012132777A true JP2012132777A (ja) | 2012-07-12 |
| JP5750883B2 JP5750883B2 (ja) | 2015-07-22 |
Family
ID=46648536
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010284811A Expired - Fee Related JP5750883B2 (ja) | 2010-12-21 | 2010-12-21 | プローブ装置及びプローブ測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5750883B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014228284A (ja) * | 2013-05-17 | 2014-12-08 | 日本メクトロン株式会社 | 同軸プローブ保持機構および電気特性検査装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08304457A (ja) * | 1995-05-08 | 1996-11-22 | Oki Electric Ind Co Ltd | 高周波プローブの構造 |
| JPH09138111A (ja) * | 1995-11-16 | 1997-05-27 | Sharp Corp | アライメント装置および方法 |
| JP2002040107A (ja) * | 2000-07-24 | 2002-02-06 | Hitachi Ltd | プローブ駆動方法及びプローブ装置 |
| JP2003142536A (ja) * | 2001-10-31 | 2003-05-16 | Shin Etsu Handotai Co Ltd | 特性値測定装置、特性値測定方法、及びプローブ接触方法 |
-
2010
- 2010-12-21 JP JP2010284811A patent/JP5750883B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08304457A (ja) * | 1995-05-08 | 1996-11-22 | Oki Electric Ind Co Ltd | 高周波プローブの構造 |
| JPH09138111A (ja) * | 1995-11-16 | 1997-05-27 | Sharp Corp | アライメント装置および方法 |
| JP2002040107A (ja) * | 2000-07-24 | 2002-02-06 | Hitachi Ltd | プローブ駆動方法及びプローブ装置 |
| JP2003142536A (ja) * | 2001-10-31 | 2003-05-16 | Shin Etsu Handotai Co Ltd | 特性値測定装置、特性値測定方法、及びプローブ接触方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014228284A (ja) * | 2013-05-17 | 2014-12-08 | 日本メクトロン株式会社 | 同軸プローブ保持機構および電気特性検査装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5750883B2 (ja) | 2015-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100747107B1 (ko) | 인쇄회로기판 검사용 장치 및 방법과, 상기 장치 및방법용 검사 프로브 | |
| TWI838948B (zh) | 用於積體電路的自動化測試系統 | |
| US7719297B2 (en) | Probe apparatus and method for measuring electrical characteristics of chips and storage medium therefor | |
| US20070159194A1 (en) | Probing apparatus | |
| US8442300B2 (en) | Specified position identifying method and specified position measuring apparatus | |
| TWI384569B (zh) | 視線不清下之探測應用所使用之探針針尖與裝置腳位之對準 | |
| TWI718773B (zh) | 探測設備的操作方法 | |
| JP2008177579A (ja) | 動的ウエハ応力処理装置 | |
| KR101654825B1 (ko) | 기판의 밀집 검사 부위의 엑스레이 검사 방법 | |
| JP4106228B2 (ja) | ポゴピンの弾性測定装置 | |
| JP5530261B2 (ja) | 被検査体の通電試験方法 | |
| JP3173676B2 (ja) | プローブ装置 | |
| JP5750883B2 (ja) | プローブ装置及びプローブ測定方法 | |
| JP2004063877A (ja) | ウェハの位置決め修正方法 | |
| US20060212248A1 (en) | Procedure for reproduction of a calibration position of an aligned and afterwards displaced calibration substrate in a probe station | |
| KR102536717B1 (ko) | Pcba 검사장치 | |
| KR20040103903A (ko) | 신호 검출용 접촉체 및 신호 교정 시스템 | |
| CN208937633U (zh) | 综合调节式待测物的摆放位置定位校正结构 | |
| JPH08201430A (ja) | プローバのアライメント方法及び装置 | |
| US8027528B2 (en) | Method for calculating height of chuck top and program storage medium for storing same method | |
| JP2018189458A (ja) | 電気的接続装置及びその製造方法 | |
| CN120506927B (zh) | 探针卡测试母板的校准方法、装置及系统 | |
| CN112703407A (zh) | 传感器探针组件 | |
| KR100392142B1 (ko) | 웨이퍼 프로버에 있어서 핀과 패드의 정렬 방법 | |
| CN120538798A (zh) | 晶圆级mems扫描镜测试装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141118 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150504 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5750883 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |