JP2012133446A - 車両運転支援装置 - Google Patents
車両運転支援装置 Download PDFInfo
- Publication number
- JP2012133446A JP2012133446A JP2010282861A JP2010282861A JP2012133446A JP 2012133446 A JP2012133446 A JP 2012133446A JP 2010282861 A JP2010282861 A JP 2010282861A JP 2010282861 A JP2010282861 A JP 2010282861A JP 2012133446 A JP2012133446 A JP 2012133446A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- preceding vehicle
- detected
- front environment
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Traffic Control Systems (AREA)
Abstract
【解決手段】左右のレーザスキャナで自車両の前方環境を検出し、検出した前方環境に、車速V2が閾値Vth未満の先行車両を検出したら、この先行車両前方スペース(先行車両の前方環境)を左右のレーザスキャナで検出するために、自車両を幅方向に移動させる。そして、自車両を幅方向に移動させて、先行車両前方スペースを左右のレーザスキャナで検出できたら、その検出結果を運転者に提供する。
【選択図】図9
Description
この従来技術では、路車間通信を介して自車両周辺の情報を受信し、この情報に基づいて自車両の先行車両前方の道路上における空きスペースを検出し、その検出結果に基づいて先行車両の追い越しが実行可能であるか否かを判定している。
本発明の課題は、路車間通信によらず、先行車両の前方環境を検出することである。
《第一実施形態》
《構成》
図1は、運転支援装置の概略構成図である。
運転支援装置100は、CPU101と、GPS201と、メモリ202と、ディスプレイ203と、レーザスキャナ204及び205と、車輪速センサ206と、ブレーキアクチュエータ207と、ステアリングアクチュエータ208と、CCDカメラ209及び210と、アクセルセンサ301と、ステアリングセンサ302と、ブレーキセンサ303と、駆動ユニット401と、を備える。
CCDカメラ209は、左のドアミラーに設けられ、CCDカメラ210は、右のドアミラーに設けられる。CCDカメラ209及び210は、夫々、ドアミラー位置から下方に向けて設置され、路面に標示された車道中央線、車線境界線、車道外側線などの通行区分線を撮影し、撮影した画像データをCPU101に送信する。
本実施形態では、CPU101は、先行車両の走行状態や先行車両前方スペース等を確認するためにレーザスキャナ204及び205を活用して情報収集を行い、先行車両前方スペースが把握できない場合は、自車を減速させたり、車幅方向に移動(横移動)させたりすることにより、積極的に先行車両前方スペースを確認する。
GPS(Global Positioning System)201は、自車の緯度、経度等を検出し、CPU101へと送信する。
ディスプレイ203は、CPU101が自車周辺車両状況や地形情報をもとに算出した追い越し時に必要となる自車加速代、走行距離、所要時間をドライバへと明示する際に活用する。なお、ナビゲーションシステムのディスプレイと併用でも構わない。また、先行車両の先の空きスペースを確認している際、本システムによる蛇行中であることをドライバへとアナウンスするときにも活用される。
アクセルセンサ301は、ドライバが操作するアクセル開度情報を検出し、これをCPU101へと送信する。
ステアリングセンサ302は、ドライバが操作するステアリング舵角を検出し、これをCPU101へと送信する。
ブレーキセンサ303は、ドライバが操作するブレーキペダルの開度情報を検出し、これをCPU101へと送信する。
ステアリングアクチュエータ208は、電動パワーステアリング装置などで操舵角を制御できるユニットである。
図3は、追い越し走行支援処理を示すフローチャートである。
この追い越し走行支援処理は、CPU101で所定時間(例えば10msec程度)毎に実行される。
先ずステップS10では、GPS201で検出した自車の緯度、経度等から、メモリ202に記録されたデジタルマップを参照して自車両が現在走行している走行路の幅W(単位:m)、及び曲率ρ(単位:1/m)等の情報を検出する。
ステップS40では、先行車両の走行状態として、自車前端から先行車両後端までの距離L(単位:m)、先行車両の車速V2(単位:m/s)、走行路の左右端までの距離WL2、WR2(単位:m)、先行車両の車幅方向の移動速度VW2(単位:m/s)を検出する。
先行車両における走行路の左右端からの距離WL2及びWR2(単位:m)は、ステップS20で検出した自車左右の通行区分線を先行車両方向に延長した線と、先行車両との車幅方向の距離として検出する。このとき、自車左右の通行区分線をステップS10で検出した走行路曲率ρに基づいて自車左右の通行区分線を先行車両方向に延長した線と、先行車両との車幅方向の距離として検出する。
また、先行車両の横速度(車線幅方向の移動速度)VW2(単位:m/s)を、走行路の左右端からの距離WL2及びWR2の時間微分値の平均値として求める。
この閾値Vthは先行車両が微速走行状態、或いは停止状態にあるかどうかを判断するための閾値であり、本実施例では、交通教則本等で徐行速度の目安とされているVth=2.8[m/s]≒10km/hが設定される。
ステップS60では、ステップS50で先行車両が微速走行状態、或いは停止状態にあることを受けて、この先行車両を追い越すために、レーザスキャナ204及び205が先行車両前方スペースを確認できるように、自車両を車幅方向に移動させる。
1.基本移動
図4は、走行経路の一例を示す図である(直線経路)。
先ず、先行車両が停止していると仮定して、先行車両の手前Lfr+Lfl(単位:m)の位置で車線幅左寄りに、且つ先行車両の手前Lfr(単位:m)で車線幅右寄りになるような走行経路を生成し、この経路に追従するように左右輪の制動力に差が生じるようブレーキアクチュエータ207を用いて制御を行う。
Lfl=(L−Lfr)÷2 …………(1)
すなわち、本実施例では、Lfr<Lflであり、Lfrには自車の車長BL1(単位:m)が設定され、Lflには自車前端から先行車両後端までの距離LからLfrを引いた値の半分として設定される。
ここでは、自車の経路を、先行車両の先のスペースを検出する場所を直線で結んで作成しているが、三角関数や円弧等を組み合わせてより滑らかな経路としてもよい。
また、レーザスキャナ204及び205が確実に先行車両前方スペースを検出できるよう、図5に示すように、走路幅の左右に寄りながら、通行区分線に沿って走行できるように経路を生成するとよい。すなわち、走行路が略直線である場合、先行車両のLfr手前と、Lfr+Lfl手前の位置で、ある程度の直線走行区間を設けることで、先行車両前方スペースを確認するために十分な時間を設けることができる。
図6は、走行経路の一例を示す図である(一時停止)。
ここでは、自車両を先行車両前方スペースを確認できる位置で、先行車両に速度を合わせるために、自車両を減速させる。すなわち、先行車両の手前で自車両を一時停止させたり徐行させる。先行車両の手前で、速度が十分に落ちていれば、図6に示すように、車線幅左寄りに移動する地点を先行車両側に変位させてもよい。このように、先行車両に十分に近寄った状態で、車線幅の左から右へと移動させることで、先行車両前方スペースをより確実に確認できる。
また、上記の手法では先行車両が停止していると仮定していたが、ステップS40で検出した先行車両の車速V2から、自車が先行車両に接近するまでに先行車両が移動する距離を見込んで経路を生成するとなおよい。
図7は、走行経路の一例を示す図である(先行車両の片寄り)。
ここでは、先行車両の走行路の左右端からの距離WL2、WR2が、WL2>WR2の関係であれば、先行車両が右寄りであるため、自車両を自車を先行車両の手前Lfr(単位:m)だけ手前で車幅方向左側に寄るような経路を生成する。この場合、Lfrは自車の車長BL1の2倍とする。
一方、先行車両の走行路の左右端からの距離WL2、WR2が、WL2≦WR2の関係であれば、先行車両が左寄りであるため、自車両を自車を先行車両の手前Lfr(単位:m)だけ手前で車幅方向右側に寄るような経路を生成する。この場合、Lfrは自車の車長BL1とする。
なお、先行車両が左寄りのときよりも右寄りのときにLfrの値を大きくしているのは、左側に寄ったほうが先行車両の先のスペースを確認しやすくとも、追い越しは一般的に右側から行われるため、左側に寄った後に右から追い越すためには先行車両との間にスペースが必要なためである。
図8は、走行経路の一例を示す図である(カーブ路)。
ここでは、左右何れの車幅方向に寄った方が、先行車両前方スペースの走査可能領域をより手前にできるかを自車と先行車両の位置から幾何学的に判断する。つまり、どちらに寄った方が、より先行車両前方スペースを確認しやすいかを判断する。そして、上記の方法3と同様にして走行経路を生成してから、ブレーキアクチュエータ207を用いて制御を行う。
先ず、先行車両の手前で左側に寄ったときの場合について説明する。左側に寄ったときは左前端部のレーザスキャナ204で先行車両前方スペースを走査することになり、このときのレーザスキャナ204の取り付け位置を原点、車幅方向をX軸、自車の向きをY軸とする。そして、ステップS20で検出した自車左右の通行区分線を、ステップS10で検出した走行路曲率ρに基づいて延長し、この座標軸上にプロットする(図8(手順1))。
そして、先行車両のうちレーザスキャナ204から見て最も左端の部分に向けて、原点から直線を引く(図8(手順3))。この直線上で、左側の通行区分線との車幅方向の距離が、自車両の幅と同じ長さBW1(単位:m)となる地点と、先行車両前端との走路方向の距離LLmin(単位:m)を自車の進行方向を正として求める(図8(手順4))。このLLminは、自車両が左側に寄ったときに、左側のレーザスキャナ204で走査可能な領域が、先行車両の前端からどれくらい先になるかを表す。
そして、LLminとLrminの小さい方が、先行車両前方スペースのうちのより手前の領域を確認できることになるので、自車両をその方向に寄せるような走行経路を生成する。
ここでは、ステップS40で検出した先行車両の横速度(車線幅方向の速度)VW2から、自車が先行車両に接近するまでに先行車両が横方向に移動する距離を予測して、先行車両前方スペースを確認する経路を生成する。
具体的には、先ず上記の方法2を用いる場合には、先行車両の手前で、その先のスペースを確認できるよう先行車両の車速V2に合わせて、一時停止又は徐行させるので、先行車両までの距離Lだけ進む間に、先行車両の車速VW2に一定の加速度(減速度)で到達する時間tは下記(2)式によって求まる。
t=2×Ld÷(V1+V2) …………(2)
LS2=VW2×t …………(3)
一方、上記の方法2を用いない場合には、上記(2)式においてV2をV1に置換し、自車が現在の車速を維持するとして求める。
ここでは、ステップS40で検出した自車前端から先行車両後端までの距離Lが、左右確認可能距離閾値Lth以上となる場合について説明する。
自車両を、先ず先行車両前方スペースが確認し難い車幅方向に寄せ、その後先行車両の手前で先行車両前方スペースが確認しやすい車幅方向に寄せるように経路生成を行う。先行車両の先のスペースが確認し易い車幅方向の判断は、上記の方法3〜5に従って行う。先行車両前方スペースが確認しやすいという、先行車両の手前までの距離についても上述したように、車幅方向左側に寄る場合にはLfl3だけ手前で、車幅方向右側に寄る場合にはLfr3だけ手前で寄せるように経路生成を行う。
Lth=(W−BW1+WL1)×(V1+V2)÷2÷(L−Lfr3)
…………(4)
先行車両手前で車幅左方向による場合
Lth=(W−BW1+WR1)×(V1+V2)÷2÷(L−Lfl3)
…………(5)
αc=(V12+V22)÷2L …………(6)
なお、Lthは車幅方向に一定の加速度で移動させたときに、例えばこの車幅方向加速度が閾値αth=0.5[m/s2]を超えないようにして決めてもよい。
ここでは、ステップS40で検出した自車前端から先行車両後端までの距離Lが、左右確認可能距離閾値Lth未満となる場合について説明する。
自車両を前記(6)式で設定した減速度よりも強い減速をかけて、車幅左右方向の平均移動速度を閾値Vcth=0.5[m/s]に抑えるようにする。
ここでは、生成した経路に追従するように左右輪の制動力に差が生じるようブレーキアクチュエータ207を用いて制御を行う前に、ディスプレイ203上に『先行車両の先を確認します』等のメッセージを表示したり、スピーカーから音声を流してドライバに報知する。
このとき、ドライバに報知してから直ぐにブレーキアクチュエータ207を用いて制御を行うのではなく、ドライバが報知内容を理解できるよう例えば数秒間をおいてから制御するようにしてもよい。このようにする場合には、実際に制御を開始するときの自車両や先行車両の走行状態等を予測して経路生成を行うようにする。
ここでは、先ず先行車両を追い越す車幅方向を判断する。例えば、一般的な追い越しを想定し、常に車幅右側から追い越すと設定してもよい。また、レーザスキャナ204及び205等のセンサを用い、先行車両の左右側方の空きスペースを検出して、この空きスペースが大きい方向としてもよい。
なお、上記の方法1〜9は、任意に組み合わせてもよい。
続くステップS70では、検出された先行車両の先の空きスペースや、対向車や後続車の走行状態に応じて、追い越し支援を行う。
また、レーザスキャナ204や205を用いて対向車両を検出して、追い越し可能であればその旨をディスプレイ203等を用いてドライバに報知し、追い越し不可能であると判断された場合にはブレーキアクチュエータ207を用いて、追い越しをできないように運転支援等を行う。
なお、上記の方法2を用いる場合、ステップS60で生成した経路の終点、すなわち先行車両の先のスペースを確認できる位置で自車を先行車両の速度に合わせて、一時停止又は徐行させるようにブレーキアクチュエータ207を用いて運転支援を行う。そしてドライバによるアクセル操作によって追い越しができるようにする。
本実施形態では、経路追従にブレーキアクチュエータ207を用いているが、ステアリングアクチュエータ208を用いてもよい。
路車間通信を介して自車両周辺の情報を受信し、それに基づいて先行車両前方スペースを確認する構成の場合、インフラストラクチャの未整備、故障、メンテナンス作業などによって十分な情報提供が得られないと、先行車両前方スペースを確認できなくなってしまう。
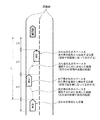
図9は、本実施形態の概念図である。
そこで、レーザスキャナ204及び205で自車両の前方環境を検出し、検出した前方環境に、車速V2が閾値Vth未満の先行車両を検出したら(ステップS30、S50の判定が共に“Yes”)、この先行車両前方スペース(先行車両の前方環境)をレーザスキャナ204及び205で検出するために、自車両を幅方向に移動させる(ステップS60)。
このように、路車間通信によらず、レーザスキャナ204及び205で先行車両の前方環境を検出することができる。したがって、従来技術の路車間通信に頼ったシステムのように、インフラストラクチャの未整備、故障、メンテナンス作業などによって十分な情報提供が得られない、といった問題を招くことがない。
最も基本的な移動は、自車両を先ず先行車両を追い越す側とは反対側に、つまり走行路の左側境界まで移動させ、次に先行車両を追い越す側に、つまり走行路の右側境界まで移動させる経路である(図4)。
ここで、左側境界に到達する地点では、先行車両に対して少なくともLfr+Lflの車間距離をとり、右側境界に到達する地点では、先行車両に対して少なくともLfrの車間距離をとる。これにより、左側境界から右側境界への移動、及び右側境界から追い越し動作へと余裕をもって移行することができる。
したがって、走行路における先行車両の横位置を検出し、走行路の左右端からの距離WL2、WR2に応じて車両の横移動経路を決定する。
すなわち、自車両を走行路の左側境界まで移動させる場合と、自車両を走行路の右側境界まで移動させる場合とで、先行車両の前方環境をレーザスキャナ204及び205によって検出できる領域がこの先行車両に近くなる側を判断する(図8)。
そして、先行車両前方スペースのうちのより手前の領域を確認できる側を判断して、自車両をその方向に移動させる。これにより、自車両の幅方向への効率的な移動によって、先行車両の前方環境をより広い範囲で確認することができる。
以上より、レーザスキャナ204、205が「前方環境検出手段」に対応し、GPS201、メモリ202、CPU101が「道路情報検出手段」に対応する。また、ブレーキアクチュエータ207、ステアリングアクチュエータ208、ステップS60の処理が「走行制御手段」に対応し、ディスプレイ203、ステップS70の処理が「報知手段」に対応する。また、ステップS40の処理が「横距離検出手段」と「横速度検出手段」に対応する。
このように、車速が予め定められた閾値未満の先行車両を検出したときに、走行路の幅に基づいて自車両を幅方向に移動させるので、路車間通信によらず、先行車両の前方環境を検出することができる。
このように、先行車両が左寄りに走行していれば自車両を右側に移動させ、先行車両が右寄りに走行していれば自車両を左側に移動させるので、自車両の幅方向への移動を最小限に抑制し、効率的に先行車両の前方環境を検出することができる。
このように、検出できる領域が先行車両に近くなる側を判断し、その方向に自車両を移動させることで、自車両の幅方向への効率的な移動によって、先行車両の前方環境をより広い範囲で確認することができる。
このように、自車両が走行路の左側境界及び右側境界に到達時点での先行車両の横距離を推定することで、自車両の幅方向への移動を最小限に抑制し、より効果的に先行車両の前方環境を検出できる方向を的確に判断することができる。
このように、左右両側の境界まで自車両を移動させることで、先行車両の前方環境をより広い範囲で検出することができる。
(6)車両運転支援装置は、自車両から前記先行車両までの距離が予め定められた閾値未満であれば、自車両を減速させる。
このように、先行車両に対して十分な車間距離が確保できていないときには、自車両を減速させることで、左側境界から右側境界への移動、及び右側境界から追い越し動作へと余裕をもって移行することができる。
このように、事前に自車両を幅方向に移動させる旨を運転者に報知することで、運転者の違和感を抑制することができる。
(8)車両運転支援装置は、自車両を前記先行車両を追い越す側とは反対側に移動させる前に、先行車両の前方環境を検出するために、自車両を先行車両を追い越す側とは反対側に移動させる旨を運転者に報知する。
このように、事前に自車両を幅方向に移動させる旨を運転者に報知することで、運転者の違和感を抑制することができる。特に、自車両を追い越す側とは反対側に移動させる場合には、運転者に違和感を与える可能性が高いため、その旨を事前にアナウンスしておくことが望ましい。
このように、先行車両の前方に自車両の侵入可能な領域が無く、追い越しができないと判断したときには、先行車両の前方環境を検出できる位置で自車両を待機させることで、無理な追い越しを実行してしまうことを抑制することができる。
このように、自車両を待機させる旨を運転者に報知することで、運転者が無理な追い越しを実行してしまうことを抑制することができる。
202 メモリ
203 ディスプレイ
204 レーザスキャナ
205 レーザスキャナ
206 車輪速センサ
207 ブレーキアクチュエータ
208 ステアリングアクチュエータ
209 カメラ
210 カメラ
301 アクセルセンサ
302 ステアリングセンサ
303 ブレーキセンサ
401 駆動ユニット
Claims (10)
- 自車両に搭載され、自車両の前方環境を検出する前方環境検出手段と、
自車両の走行路の幅を含む道路情報を検出する道路情報検出手段と、
前記前方環境検出手段で検出した前方環境に、車速が予め定められた閾値未満の先行車両が存在するときに、当該先行車両の前方環境を前記前方環境検出手段によって検出するために、前記道路情報検出手段で検出した走行路の幅に基づいて、自車両を幅方向に移動させる走行制御手段と、
前記走行制御手段で自車両を幅方向に移動させた際に、前記前方環境検出手段で検出した前記先行車両の前方環境を運転者に報知する報知手段と、を備えることを特徴とする車両運転支援装置。 - 前記先行車両から走行路の左側境界及び右側境界までの横距離を検出する横距離検出手段を備え、
前記走行制御手段は、前記横距離検出手段で検出した左側境界及び右側境界までの横距離のうち、広い側に自車両を移動させることを特徴とする請求項1に記載の車両運転支援装置。 - 前記道路情報検出手段は、走行路の曲率を含む道路情報を検出し、
前記走行制御手段は、自車両を走行路の左側境界まで移動させる場合と、自車両を走行路の右側境界まで移動させる場合とで、前記先行車両の前方環境を前記前方環境検出手段によって検出できる領域が当該先行車両に近くなる側を、前記道路情報検出手段で検出した走行路の曲率に基づいて判断し、前記前方環境検出手段によって検出できる領域が当該先行車両に近くなる側の境界まで自車両を移動させることを特徴とする請求項1又は2に記載の車両運転支援装置。 - 前記先行車両の幅方向への横速度を検出する横速度検出手段を備え、
前記横距離検出手段は、前記横速度検出手段で検出した横速度に基づいて、自車両が走行路の左側境界及び右側境界に到達する時点での、前記先行車両から走行路の左側境界及び右側境界までの横距離を推定することを特徴とする請求項2又は3に記載の車両運転支援装置。 - 前記走行制御手段は、走行路の左側境界及び右側境界のうち、自車両を先ず前記先行車両を追い越す側とは反対側に移動させ、次に当該先行車両を追い越す側に移動させることを特徴とする請求項1〜4の何れか一項に記載の車両運転支援装置。
- 前記走行制御手段は、自車両から前記先行車両までの距離が予め定められた閾値未満であれば、自車両を減速させることを特徴とする請求項1〜5の何れか一項に記載の車両運転支援装置。
- 前記報知手段は、前記走行制御手段が自車両を幅方向に移動させる前に、前記先行車両の前方環境を前記前方環境検出手段によって検出するために、当該走行制御手段によって自車両を幅方向に移動させる旨を運転者に報知することを特徴とする請求項1〜6の何れか一項に記載の車両運転支援装置。
- 前記報知手段は、前記走行制御手段が自車両を前記先行車両を追い越す側とは反対側に移動させる前に、前記先行車両の前方環境を前記前方環境検出手段によって検出するために、当該走行制御手段によって自車両を前記先行車両を追い越す側とは反対側に移動させる旨を運転者に報知することを特徴とする請求項7に記載の車両運転支援装置。
- 前記走行制御手段は、前記前方環境検出手段で検出した前記先行車両の前方環境に、自車両の進入可能な領域が無いときには、走行路の左側境界及び右側境界のうち、自車両を当該先行車両を追い越す側に移動させた状態で、自車両を待機させることを特徴とする請求項1〜8の何れか一項に記載の車両運転支援装置。
- 前記報知手段は、前記走行制御手段が自車両を前記先行車両を追い越す側に移動させた状態で、自車両を待機させる際に、当該走行制御手段によって自車両を前記先行車両を追い越す側に移動させた状態で、自車両を待機させる旨を運転者に報知することを特徴とする請求項9に記載の車両運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282861A JP5664212B2 (ja) | 2010-12-20 | 2010-12-20 | 車両運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010282861A JP5664212B2 (ja) | 2010-12-20 | 2010-12-20 | 車両運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012133446A true JP2012133446A (ja) | 2012-07-12 |
| JP5664212B2 JP5664212B2 (ja) | 2015-02-04 |
Family
ID=46649000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010282861A Active JP5664212B2 (ja) | 2010-12-20 | 2010-12-20 | 車両運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5664212B2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013180638A (ja) * | 2012-03-01 | 2013-09-12 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP2014180986A (ja) * | 2013-03-21 | 2014-09-29 | Toyota Motor Corp | 車線変更支援装置 |
| JP2016037192A (ja) * | 2014-08-08 | 2016-03-22 | 日産自動車株式会社 | 走行支援装置及び走行支援方法 |
| JP2016112911A (ja) * | 2014-12-11 | 2016-06-23 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| US9499169B2 (en) | 2013-09-20 | 2016-11-22 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| JP2017016182A (ja) * | 2015-06-26 | 2017-01-19 | 株式会社デンソー | 運転支援装置 |
| JP2017102839A (ja) * | 2015-12-04 | 2017-06-08 | 株式会社デンソー | 運転支援装置 |
| JP2019036050A (ja) * | 2017-08-10 | 2019-03-07 | 本田技研工業株式会社 | 走行制御装置、走行制御方法、および車両 |
| CN110239547A (zh) * | 2018-03-07 | 2019-09-17 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法以及存储介质 |
| WO2019181709A1 (ja) * | 2018-03-23 | 2019-09-26 | パナソニックIpマネジメント株式会社 | 車両及び自動運転制御装置 |
| JP2019217846A (ja) * | 2018-06-18 | 2019-12-26 | 本田技研工業株式会社 | 車両制御装置、車両制御方法およびプログラム |
| JP2021149201A (ja) * | 2020-03-16 | 2021-09-27 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| KR20230091366A (ko) * | 2021-12-16 | 2023-06-23 | 현대오토에버 주식회사 | 주행 차선 구분 장치 및 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08287399A (ja) * | 1995-04-11 | 1996-11-01 | Fujitsu Ten Ltd | 車間距離制御装置 |
| JP2002295660A (ja) * | 2001-03-30 | 2002-10-09 | Nissan Diesel Motor Co Ltd | 車両の変速装置 |
| JP2004326355A (ja) * | 2003-04-23 | 2004-11-18 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2005010892A (ja) * | 2003-06-17 | 2005-01-13 | Nissan Motor Co Ltd | 車両用道路形状認識装置 |
| JP2005149402A (ja) * | 2003-11-19 | 2005-06-09 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2007108967A (ja) * | 2005-10-13 | 2007-04-26 | Nissan Motor Co Ltd | 車両用追い越し走行支援装置 |
-
2010
- 2010-12-20 JP JP2010282861A patent/JP5664212B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08287399A (ja) * | 1995-04-11 | 1996-11-01 | Fujitsu Ten Ltd | 車間距離制御装置 |
| JP2002295660A (ja) * | 2001-03-30 | 2002-10-09 | Nissan Diesel Motor Co Ltd | 車両の変速装置 |
| JP2004326355A (ja) * | 2003-04-23 | 2004-11-18 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2005010892A (ja) * | 2003-06-17 | 2005-01-13 | Nissan Motor Co Ltd | 車両用道路形状認識装置 |
| JP2005149402A (ja) * | 2003-11-19 | 2005-06-09 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2007108967A (ja) * | 2005-10-13 | 2007-04-26 | Nissan Motor Co Ltd | 車両用追い越し走行支援装置 |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013180638A (ja) * | 2012-03-01 | 2013-09-12 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP2014180986A (ja) * | 2013-03-21 | 2014-09-29 | Toyota Motor Corp | 車線変更支援装置 |
| US9499169B2 (en) | 2013-09-20 | 2016-11-22 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| JP2016037192A (ja) * | 2014-08-08 | 2016-03-22 | 日産自動車株式会社 | 走行支援装置及び走行支援方法 |
| JP2016112911A (ja) * | 2014-12-11 | 2016-06-23 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| US10878702B2 (en) | 2015-06-26 | 2020-12-29 | Denso Corporation | Driving support apparatus and driving support method |
| JP2017016182A (ja) * | 2015-06-26 | 2017-01-19 | 株式会社デンソー | 運転支援装置 |
| JP2017102839A (ja) * | 2015-12-04 | 2017-06-08 | 株式会社デンソー | 運転支援装置 |
| JP2019036050A (ja) * | 2017-08-10 | 2019-03-07 | 本田技研工業株式会社 | 走行制御装置、走行制御方法、および車両 |
| CN110239547B (zh) * | 2018-03-07 | 2022-06-21 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法以及存储介质 |
| JP2019159426A (ja) * | 2018-03-07 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7021983B2 (ja) | 2018-03-07 | 2022-02-17 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN110239547A (zh) * | 2018-03-07 | 2019-09-17 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法以及存储介质 |
| WO2019181709A1 (ja) * | 2018-03-23 | 2019-09-26 | パナソニックIpマネジメント株式会社 | 車両及び自動運転制御装置 |
| JP2019217846A (ja) * | 2018-06-18 | 2019-12-26 | 本田技研工業株式会社 | 車両制御装置、車両制御方法およびプログラム |
| JP2021149201A (ja) * | 2020-03-16 | 2021-09-27 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7141421B2 (ja) | 2020-03-16 | 2022-09-22 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US11702078B2 (en) | 2020-03-16 | 2023-07-18 | Honda Motor Co., Ltd. | Vehicle control device, vehicle control method, and storage medium |
| KR20230091366A (ko) * | 2021-12-16 | 2023-06-23 | 현대오토에버 주식회사 | 주행 차선 구분 장치 및 방법 |
| KR102599268B1 (ko) * | 2021-12-16 | 2023-11-06 | 현대오토에버 주식회사 | 주행 차선 구분 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5664212B2 (ja) | 2015-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5664212B2 (ja) | 車両運転支援装置 | |
| JP6931370B2 (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JP7172257B2 (ja) | 自動運転システム | |
| JP6222137B2 (ja) | 車両制御装置 | |
| JP6115576B2 (ja) | 車両走行制御装置 | |
| JP7113383B2 (ja) | 運転支援システム、運転支援装置、運転支援方法 | |
| JP6677822B2 (ja) | 車両制御装置 | |
| JP6337435B2 (ja) | 運転支援装置 | |
| JP2019091279A (ja) | 運転支援装置 | |
| JP7163729B2 (ja) | 車両制御装置 | |
| JP2019197467A (ja) | 車両制御装置 | |
| JP2014041556A (ja) | 運転支援装置 | |
| KR20160013714A (ko) | 차량간 통신을 이용한 차량제어불능 경고 장치와 방법 | |
| JPWO2017077807A1 (ja) | 車両走行制御装置 | |
| JP2019148964A (ja) | 自動運転システム | |
| JPWO2019073578A1 (ja) | 車両並びにその制御装置及び制御方法 | |
| JP7008617B2 (ja) | 車両制御装置 | |
| JP2017073060A (ja) | 車線変更支援装置 | |
| JP2019036050A (ja) | 走行制御装置、走行制御方法、および車両 | |
| CN119734685A (zh) | 车辆用控制装置、车辆控制方法及存储介质 | |
| JP2016175567A (ja) | 操舵支援装置 | |
| JP7489418B2 (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| JP6951315B2 (ja) | 車両制御装置 | |
| JP2018127073A (ja) | 車線逸脱抑制装置 | |
| JP2007299193A (ja) | 交差点交通管制システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131028 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140805 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141111 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141124 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5664212 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |