JP2012136191A - 車両の制御システム - Google Patents
車両の制御システム Download PDFInfo
- Publication number
- JP2012136191A JP2012136191A JP2010290940A JP2010290940A JP2012136191A JP 2012136191 A JP2012136191 A JP 2012136191A JP 2010290940 A JP2010290940 A JP 2010290940A JP 2010290940 A JP2010290940 A JP 2010290940A JP 2012136191 A JP2012136191 A JP 2012136191A
- Authority
- JP
- Japan
- Prior art keywords
- braking force
- vehicle
- regenerative braking
- deceleration
- engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】運転者の感じる減速度の違和感を抑えること。
【解決手段】機械エネルギを動力とするエンジン10、電気エネルギを変換した機械エネルギを動力とするモータ/ジェネレータ20、及びエンジン10と駆動輪WL,WRとの間の動力伝達を断接可能なクラッチ50を備えた車両の制御システムにおいて、減速の際に、エンジン10のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させてモータ/ジェネレータ20による回生制動力を発生させること。
【選択図】図1
【解決手段】機械エネルギを動力とするエンジン10、電気エネルギを変換した機械エネルギを動力とするモータ/ジェネレータ20、及びエンジン10と駆動輪WL,WRとの間の動力伝達を断接可能なクラッチ50を備えた車両の制御システムにおいて、減速の際に、エンジン10のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させてモータ/ジェネレータ20による回生制動力を発生させること。
【選択図】図1
Description
本発明は、機械エネルギを動力とする機械動力源と電気エネルギを変換した機械エネルギを動力とする電気動力源とを備え、機械動力源を用いたエンジン走行モードと、電気動力源を用いたEV走行モードと、機械動力源及び電気動力源を用いたハイブリッド走行モードと、を手動で切り替えさせる車両の制御システムに関する。
従来、駆動輪駆動用の動力源として機械動力源と電気動力源とを備えた車両が知られている。例えば、下記の特許文献1には、エンジン(機械動力源)とモータ/ジェネレータ(電気動力源)との間にクラッチを備えた車両が開示されている。この特許文献1の車両において、電子制御装置は、減速走行時のフューエルカット中にブレーキオンが検知された場合、そのクラッチを解放してエンジンを駆動輪側から切り離すと共に、エンジンブレーキ力に相当する制動力をモータ/ジェネレータの回生トルクによって出力する。これにより、この車両においては、クラッチの解放と共に発生できなくなったエンジンブレーキ力に相当する制動力が補完される。また、下記の特許文献2には、エンジンと自動変速可能な有段変速機との間に自動制御されるクラッチを備えると共に、その有段変速機の出力側にモータ/ジェネレータを備える車両が開示されている。この特許文献2の車両の電子制御装置は、減速時に、そのクラッチを解放してモータ/ジェネレータの回生トルクで減速させるEモード、又は、そのクラッチを係合したままエンジンブレーキ力とモータ/ジェネレータの回生トルクで減速させるMモードの内の一方を選択する。そして、そのMモードからEモードへの切り替えに伴いクラッチが解放された場合、電子制御装置は、エンジンブレーキ力の抜けに伴うトルクショックを抑制する為に、実際に駆動輪に作用したであろうエンジンブレーキトルクを演算し、これをモータ/ジェネレータの回生トルクによって出力する。
ところで、減速時に発生する車両の制動力は、エンジンブレーキ力によるものの他に、車両の走行抵抗によるものもある。そして、減速時の車両の減速度への影響度合いとしては、エンジンブレーキ力による制動力の方が車両の走行抵抗による制動力よりも高い場合もあるが、その逆の場合もあり得る。従って、エンジンブレーキ力による制動力よりも車両の走行抵抗による制動力の方が減速度に高い影響を与える場合には、クラッチが解放された際に、従来のようにエンジンブレーキ力の抜けの分をモータ/ジェネレータの回生トルクで補うと、その際の減速度に運転者が違和感を覚える可能性がある。
そこで、本発明は、かかる従来例の有する不都合を改善し、クラッチの解放と共にエンジンブレーキ力が作用しなくなった際に、運転者の感じる減速度の違和感を抑えることのできる車両の制御システムを提供することを、その目的とする。
上記目的を達成する為、本発明は、機械エネルギを動力とする機械動力源、電気エネルギを変換した機械エネルギを動力とする電気動力源、及び前記機械動力源と駆動輪との間の動力伝達を断接可能な動力断接部を備えた車両の制御システムにおいて、減速の際に、前記機械動力源のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させて前記電気動力源による回生制動力を発生させることを特徴としている。
ここで、前記相似とは、前記何れか一方の制動力の車速低下に伴う出力特性に前記回生制動力の出力特性を一致させる場合、及び、運転者が前記回生制動力の有無に拘わらず車両の減速特性に違和感を覚えない範囲内で、前記何れか一方の制動力の車速低下に伴う出力特性よりも前記回生制動力を車速低下に伴い大きく変化させる又は小さく変化させる出力特性の場合である。
また、前記動力断接部による前記機械動力源と駆動輪との間の動力伝達の切断動作中及び当該動力伝達の切断中には、該切断動作の開始時の回生制動力を出力させることが望ましい。
本発明に係る車両の制御システムは、減速時に、車両の減速特性に強い影響を与えるエンジンブレーキ又は走行抵抗の内の何れか一方の制動力を把握し、その制動力の出力特性に相似させて電気動力源による回生制動力を発生させるので、回生制動力を発生させずに減速させるときと同等の減速特性で車両を減速させることができる。従って、この制御システムは、回生制動力の有無によって運転者が従来感じていた減速特性の違和感を抑えることができる。また、この制御システムは、動力断接部による機械動力源と駆動輪との間の動力伝達の切断動作中及び当該動力伝達の切断中に、その切断動作の開始時の回生制動力を出力させるので、その際にも回生制動力を発生させずに減速させるときと同等の減速特性で車両を減速させることができる。従って、この制御システムは、その切断動作中や切断中においても、回生制動力の有無によって運転者が従来感じていた減速特性の違和感を抑えることができる。
以下に、本発明に係る車両の制御システムの実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
[実施例]
本発明に係る車両の制御システムの実施例を図1から図7に基づいて説明する。
本発明に係る車両の制御システムの実施例を図1から図7に基づいて説明する。
本発明に係る制御システムの適用対象たる車両とは、機械エネルギを動力とする機械動力源、電気エネルギを変換した機械エネルギを動力とする電気動力源、及びその機械動力源と駆動輪との間の動力伝達を断接可能な動力断接部を備えたハイブリッド車両である。
最初に、このハイブリッド車両の一例について図1を用いて説明する。この図1の符号1は、本実施例のハイブリッド車両を示す。ここで例示するハイブリッド車両1は、機械動力源の動力のみを用いたエンジン走行モードと、電気動力源の動力のみを用いた複数のEV走行モードと、機械動力源及び電気動力源の双方の動力を用いたハイブリッド走行モードと、を運転者が手動で切り替えられるように構成している。
このハイブリッド車両1は、機械動力源として、出力軸(クランクシャフト)11から機械的な動力(エンジントルク)を出力するエンジン10を備える。そのエンジン10としては、内燃機関や外燃機関等が考えられる。このエンジン10は、その動作がエンジン用の電子制御装置(以下、「エンジンECU」という。)101によって制御される。ここでは、そのエンジンECU101と後述するハイブリッドECU100のエンジン制御に係る機能とによってエンジン制御装置(機械動力源制御装置)が構成される。
また、このハイブリッド車両1は、電気動力源として、モータ、力行駆動可能なジェネレータ又は力行及び回生の双方の駆動が可能なモータ/ジェネレータを備える。ここでは、モータ/ジェネレータ20を例に挙げて説明する。このモータ/ジェネレータ20は、例えば永久磁石型交流同期電動機として構成されたものであり、その動作がモータ/ジェネレータ用の電子制御装置(以下、「モータ/ジェネレータECU」という。)102によって制御される。ここでは、そのモータ/ジェネレータECU102と後述するハイブリッドECU100のモータ/ジェネレータ制御に係る機能とによってモータ/ジェネレータ制御装置(電気動力源制御装置)が構成される。力行駆動時には、モータ(電動機)として機能して、二次電池25とインバータ26を介して供給された電気エネルギを機械エネルギに変換し、回転軸21から機械的な動力(モータ力行トルク)を出力する。一方、回生駆動時には、ジェネレータ(発電機)として機能して、回転軸21から機械的な動力(モータ回生トルク)が入力された際に機械エネルギを電気エネルギに変換し、インバータ26を介して電力として二次電池25に蓄える。
このハイブリッド車両1には、その二次電池25の充電状態(SOC:state of charge)を検出する電池監視ユニット27が設けられている。その電池監視ユニット27は、検出した二次電池25の充電状態に係る信号(換言するならば、残存容量量(SOC量)に関する信号)をモータ/ジェネレータECU102に送信する。そのモータ/ジェネレータECU102は、その信号に基づいて二次電池25の充電状態の判定を行い、その二次電池25の充電の要否を判定する。
また、このハイブリッド車両1は、有段の手動変速機30等からなる動力伝達装置を備えている。その動力伝達装置は、エンジン10やモータ/ジェネレータ20の動力(エンジントルクやモータ力行トルク)を駆動力として駆動輪WL,WRに伝えるものである。
手動変速機30には、エンジントルクが入力される入力軸41と、この入力軸41に対して間隔を空けて平行に配置され、駆動輪WL,WR側にトルクを出力する出力軸42と、が設けられている。
その入力軸41には、動力断接部としてのクラッチ50を介してエンジントルクが入力される。そのクラッチ50は、エンジン10の出力軸11と入力軸41とを係合させる係合状態と、その出力軸11と入力軸41とを係合状態から解放(切断)させる解放状態(切断状態)と、の切り替えができるように構成された例えば摩擦クラッチ装置である。ここで云う係合状態とは、その出力軸11と入力軸41との間でのトルクの伝達、つまりエンジン10と駆動輪WL,WRとの間の動力伝達が可能な状態のことであり、完全係合状態と半係合状態とに分けられる。完全係合状態とは、出力軸11と入力軸41の回転が同期している状態のことである。半係合状態とは、出力軸11と入力軸41とが係合し始めてから、これらの回転が同期するまでの状態のことである。また、解放状態とは、その出力軸11と入力軸41との間でのトルクの伝達が行えない状態、つまりエンジン10と駆動輪WL,WRとの間の動力伝達が切断されている状態のことである。このクラッチ50は、その係合状態と解放状態の切り替え動作が運転者のクラッチペダル51の操作に従いリンク機構やワイヤー等を介して機械的に行われるものである。
本実施例においては、その出力軸42にモータ/ジェネレータ20の回転軸21を連結する。従って、そのモータ/ジェネレータ20を力行駆動させたときには、モータ力行トルクが出力軸42を介して手動変速機30に伝わる。これに対して、このモータ/ジェネレータ20を回生駆動させたときには、その出力軸42からの出力トルクがモータ/ジェネレータ20のロータに伝達される。
更に、ここで例示する手動変速機30は、前進5段、後退1段の変速段を有するものであって、前進用の変速段として第1速ギア段31,第2速ギア段32,第3速ギア段33,第4速ギア段34及び第5速ギア段35を備え、且つ、後退用の変速段として後退ギア段39を備えている。前進用の変速段は、変速比が第1速ギア段31,第2速ギア段32,第3速ギア段33,第4速ギア段34,第5速ギア段35の順に小さくなるよう構成している。尚、図1の手動変速機30はその構成を簡易的に説明したものであり、各変速段の配置については、必ずしも図1の態様になるとは限らない。
本実施例の動力伝達装置においては、クラッチ50を係合状態にすることで、入力軸41に入力されたエンジントルクが各変速段(ギア段31〜35,39)の内の何れか1つで変速されて出力軸42に伝わる。また、この動力伝達装置においては、モータ力行トルクが出力軸42に伝わる。この動力伝達装置においては、その出力軸42から出力されたトルクが最終減速機構61で減速され、差動機構62を介して駆動力として駆動輪WL,WRに伝達される。
ここで、第1速ギア段31は、互いに噛み合い状態にある第1速ドライブギア31aと第1速ドリブンギア31bの歯車対で構成する。その第1速ドライブギア31aは、入力軸41上に配置される一方、第1速ドリブンギア31bは、出力軸42上に配置される。第2速ギア段32から第5速ギア段35についても、第1速ギア段31と同様の第2速ドライブギア32a〜第5速ドライブギア35aと第2速ドリブンギア32b〜第5速ドリブンギア35bを有する。
一方、後退ギア段39については、後退ドライブギア39aと後退ドリブンギア39bと後退中間ギア39cとで構成する。その後退ドライブギア39aは、入力軸41上に配置され、後退ドリブンギア39bは、出力軸42上に配置される。また、後退中間ギア39cは、後退ドライブギア39a及び後退ドリブンギア39bと噛み合い状態にあり、回転軸43上に配置される。
この手動変速機30の構成においては、各変速段のドライブギアの内の何れかが入力軸41と一体になって回転するように配設される一方、残りのドライブギアが入力軸41に対して相対回転するように配設される。また、各変速段のドリブンギアは、その内の何れかが出力軸42と一体になって回転するように配設される一方、残りが出力軸42に対して相対回転するように配設される。
また、入力軸41や出力軸42には、運転者の変速操作に従って軸線方向に移動するスリーブ(図示略)が配設されている。入力軸41上のスリーブは、その入力軸41と相対回転可能な2つの変速段の各ドライブギアの間に配置される。一方、出力軸42上のスリーブは、その出力軸42と相対回転可能な2つの変速段の各ドリブンギアの間に配置される。このスリーブは、変速操作装置71を運転者が操作した際に、その変速操作装置71に連結されている図示しないリンク機構やフォークを介して軸線方向への移動を行う。そして、移動後のスリーブは、移動された方向に位置する相対回転可能なドライブギアやドリブンギアを入力軸41や出力軸42と一体回転させる。この手動変速機30においては、そのスリーブが運転者の変速操作装置71の変速操作に対応した方向に移動し、これによりその変速操作に応じた変速段への切り替え又はニュートラル状態(つまり入力軸41と出力軸42との間でトルクの伝達が行えない状態)への切り替えが実行される。
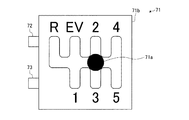
その変速操作装置71は、図2に示す如く、運転者が変速操作する際に使用するシフトレバー71a、このシフトレバー71aを夫々の変速段毎にガイドする所謂シフトゲージ71b、上記のリンク機構やフォーク等を備えている。図2は、手動変速機30をニュートラル状態に操作するときのシフトレバー71aの位置を示している。尚、この図2のシフトゲージ71b上の「1〜5」と「R」は、夫々に第1速ギア段31〜第5速ギア段35と後退ギア段39の変速位置(セレクト位置)を示している。
このハイブリッド車両1においては、EV走行モードの選択に、運転者によって操作されるEV走行モード切替装置を利用する。ここでは、そのEV走行モード切替装置としての機能を変速操作装置71にもたせることにする。例えば、この変速操作装置71は、変速位置1〜5,Rと同様のシフトレバー71aのセレクト位置であって、EV走行モードに切り替える為のEV走行モード選択位置EVをシフトゲージ71b上に備えている。本実施例のハイブリッド車両1においては、シフトレバー71aが図3に示す如くEV走行モード選択位置EVへと操作された際に、走行モードがEV走行モードとなる。このハイブリッド車両1においては、シフトレバー71aがEV走行モード選択位置EVへと操作されたときに、手動変速機30がスリーブ等によってニュートラル状態になる。
その変速操作装置71には、シフトレバー71aがEV走行モード選択位置EVに位置しているのか否かを検出するEV走行モード選択位置検出部72が設けられている。このEV走行モード選択位置検出部72とは、例えば、シフトレバー71aがEV走行モード選択位置EVにあることを検出可能な位置情報検出センサ等であり、シフトレバー71aがEV走行モード選択位置EVにあるとの判断を可能にする。このEV走行モード選択位置検出部72の検出信号は、車両全体の動作を統括的に制御する電子制御装置(以下、「ハイブリッドECU」という。)100に送信される。
そのハイブリッドECU100は、エンジンECU101及びモータ/ジェネレータECU102との間で夫々に各種センサの検出信号や制御指令等の情報の授受ができる。本実施例においては、少なくともそのハイブリッドECU100、エンジンECU101及びモータ/ジェネレータECU102が車両の制御システムの構成要件となっている。
また、この変速操作装置71は、シフトレバー71aがシフトゲージ71b上のどの変速位置1〜5,Rにあるのかについて、つまり運転者がどの変速段を選択したのか否かを検出する変速位置検出部73を備えている。その変速位置検出部73は、例えば、シフトレバー71aがどの変速位置1〜5,Rにあるのかを検出可能な位置情報検出センサ等を利用すればよい。その検出信号は、ハイブリッドECU100に送られる。このハイブリッドECU100は、その検出信号に基づいて、運転者の選択した変速段、現状の変速段を判断する。尚、ここでは、便宜上、その変速位置検出部73をEV走行モード選択位置検出部72とは別のものとして例示したが、これらを1つに統合したシフトレバー位置検出部(図示略)に置き換えてもよい。ここで、そのハイブリッドECU100には、この技術分野にて知られている周知の技術を利用して、エンジントルクや車輪速度等から現在の変速段を推定させてもよい。
シフトレバー71aが変速位置1〜5,Rに操作されている場合、ハイブリッドECU100は、エンジン走行モード又はハイブリッド走行モードの内の何れか一方を選択する。例えば、このハイブリッドECU100は、設定した運転者の駆動要求(要求駆動力)、モータ/ジェネレータECU102から送られてきた二次電池25の充電状態の情報(SOC量)、車両走行状態の情報(図示しない車両横加速度検出装置により検出された車両横加速度、車輪スリップ検出装置により検出された駆動輪WL,WRのスリップ状態等の情報)に基づいて、エンジン走行モードとハイブリッド走行モードの切り替えを行う。このハイブリッドECU100は、その走行モードに応じた制御指令をエンジンECU101及びモータ/ジェネレータECU102に送る。
一方、シフトレバー71aがEV走行モード選択位置EVに操作されている場合、ハイブリッドECU100は、その走行モードに応じた制御指令をエンジンECU101及びモータ/ジェネレータECU102に送る。
ところで、このハイブリッド車両1には、走行抵抗による制動力が働いている。従って、このハイブリッド車両1は、アクセルオフの状態で、その走行抵抗により減速する。その走行抵抗は、主に、車両重量、路面の摩擦係数、路面の勾配、空気抵抗、車速によって決まる。また、このハイブリッド車両1においては、減速時にエンジンブレーキによる制動力やモータ/ジェネレータ20による回生制動力を発生させることができる。エンジン走行モードやハイブリッド走行モードにおいては、クラッチ50が係合状態のときにエンジンブレーキによる制動力が働く。また、ハイブリッド走行モードやEV走行モードにおいては、モータ/ジェネレータ20による回生制動力を発生させることができる。
例えば、SOC量が或る所定量を超えており、これ以上二次電池25に充電できない場合には、回生制動力を発生させずに減速させる。その際、クラッチ50が解放されたときには、エンジンブレーキによる制動力も作用せず、走行抵抗による制動力によって減速する。一方、クラッチ50が係合状態のときには、走行抵抗による制動力やエンジンブレーキによる制動力によって減速する。
ここで、エンジンブレーキによる制動力の車速低下に伴う出力特性(以下、「エンジンブレーキの特性」ともいう。)は、変速段が不変の場合、図4に示す一例のように、車速と制動力(負の駆動力)が略比例関係にあり、車速の低下と共に制動力が小さくなる。また、走行抵抗による制動力の車速低下に伴う出力特性(以下、「走行抵抗の特性」ともいう。)は、図5に示す一例のように、車速と制動力(負の駆動力)が比例関係になく、車速が低くなると、車速の変化量に対する制動力の変化量が高車速時よりも少なくなる。これが為、クラッチ50が解放されたときには、その走行抵抗の特性に沿った減速特性で、つまり走行抵抗の特性に沿った減速度の変化度合いに応じて減速していく。
一方、クラッチ50が係合状態のときには、エンジンブレーキによる制動力と走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に沿った減速特性で減速していく。例えば、降坂路においては、平坦路よりも走行抵抗による影響が減るので、エンジンブレーキの特性に沿った減速特性で、つまりエンジンブレーキの特性に沿った減速度の変化度合いに応じて減速する可能性が高くなる。また、例えば、高速走行時には、走行抵抗による制動力の方がエンジンブレーキによる制動力よりも車両の減速特性に影響を与えやすいので、走行抵抗の特性に沿った減速特性で減速する可能性が高くなる。
また、SOC量が或る所定量を下回っており、二次電池25への充電が可能な場合には、回生制動力を発生させずに減速させることも、回生制動力を発生させて減速させることも可能である。前者の場合には、上記の二次電池25に充電できない場合と同様の減速特性となる。一方、後者の場合には、上記の二次電池25に充電できない場合の各種の状況において、回生制動力が付加された減速動作となる。その回生制動力は、例えばアクセルペダル75が閉じられたときから発生させる。そのアクセルオフになったときの回生制動力の初期値は、この技術分野において周知の考えの下に設定すればよい。
従来、その初期値の後の回生制動力については、例えば、発生させたい減速度の大きさやSOC量等に応じて決められている。しかしながら、その回生制動力の大きさや出力特性如何では、回生制動力を発生させずに減速させるときと比較して、ハイブリッド車両1が異なる減速特性を示すことになる。従って、その際には、運転者が減速特性の違いに違和感を覚える可能性がある。特に、エンジン走行モードやハイブリッド走行モードが選択されているときには、モータ/ジェネレータ20が動作しているのか否か、動作しているとすれば、力行駆動であるのか回生駆動であるのかを運転者が把握し難いので、回生制動力の有無による減速特性の違いに違和感を覚える可能性が高い。
そこで、この制御システムにおいては、減速時にモータ/ジェネレータ20による回生制動力を発生させるときに、回生制動力を発生させないときと同等の減速特性でハイブリッド車両1が減速できるように構成する。
具体的には、回生制動力による減速特性が回生制動力を発生させないときの上記の減速特性に相似するように設定する。その為に、エンジンブレーキの特性に沿った減速特性で減速するときには、そのエンジンブレーキの特性に相似する出力特性の回生制動力を発生させ、走行抵抗の特性に沿った減速特性で減速するときには、その走行抵抗の特性に相似する出力特性の回生制動力を発生させる。
図4には、エンジンブレーキの特性に相似させた出力特性を有する回生制動力の一例を示す。同一車速のときに、この例ではエンジンブレーキによる制動力に対して回生制動力を小さくしているが、その回生制動力は、エンジンブレーキによる制動力と同じ大きさに設定してもよく、エンジンブレーキによる制動力より大きくしてもよい。更に、この例では車速低下に伴う出力特性、つまり車速の変化量に対する制動力の変化量(換言するならば車速に対する制動力の変化勾配)をエンジンブレーキによる制動力と回生制動力とで一致させているが、回生制動力の車速低下に伴う出力特性(変化勾配)は、相似の範囲内であれば、エンジンブレーキによる制動力の変化勾配に対して変えてもよい。ここで云う相似の範囲内とは、変化勾配を一致させたものは当然のことながら、運転者が回生制動力の有無に拘わらず実車の減速特性に違和感を覚えない範囲内で、エンジンブレーキによる制動力の変化勾配よりも大きく又は小さくした回生制動力の変化勾配、即ちエンジンブレーキの特性よりも車速低下に伴い回生制動力を大きく変化させる又は小さく変化させる出力特性も含む。
また、図5には、走行抵抗の特性に相似させた出力特性を有する回生制動力の一例を示す。同一車速のときに、この例では走行抵抗による制動力に対して回生制動力を大きくしているが、その回生制動力は、走行抵抗による制動力と同じ大きさに設定してもよく、走行抵抗による制動力より小さくしてもよい。更に、この例では車速低下に伴う出力特性、つまり車速の変化量に対する制動力の変化量を走行抵抗による制動力と回生制動力とで一致させているが、回生制動力の車速低下に伴う出力特性は、相似の範囲内であれば、走行抵抗の特性に対して変えてもよい。ここで云う相似の範囲内とは、出力特性を一致させたものは当然のことながら、運転者が回生制動力の有無に拘わらず実車の減速特性に違和感を覚えない範囲内で、走行抵抗の特性よりも車速低下に伴い回生制動力を大きく変化させる又は小さく変化させる出力特性も含む。
ここで、クラッチペダル51の踏み込み操作が行われたときには、クラッチ50の解放動作中に半係合状態のクラッチ50の係合度合いに合わせてエンジンブレーキによる制動力が減少していき、クラッチ50の解放動作の終了と共にエンジンブレーキによる制動力が0になる。
従って、上記のエンジンブレーキの特性に沿った減速特性での減速中にクラッチペダル51の踏み込み操作が行われた場合には、エンジンブレーキによる制動力の変化に合わせて回生制動力を発生させる。故に、クラッチ50の解放動作中(つまり半係合状態のとき)には、クラッチペダル51の踏み込み操作の開始時点(クラッチ50の解放動作の開始時点)の回生制動力のまま一定に保たせる。これにより、ハイブリッド車両1は、クラッチ50の解放動作中にも、同様の状況下で回生制動力を発生させないときと同じ減速特性で減速する。また、クラッチ50の解放中(つまり解放状態のとき)には、解放動作を終えた時点の回生制動力(=クラッチペダル51の踏み込み操作の開始時点の回生制動力)のまま一定に保たせる。これにより、ハイブリッド車両1は、クラッチ50の解放中も、同様の状況下で回生制動力を発生させないときと同じ減速特性で減速する。ここでは、そのクラッチ50の解放動作中や解放中におけるエンジンブレーキによる制動力についても、その解放動作中や解放中におけるエンジンブレーキの特性と称する。
また、この例示では、走行抵抗の特性に沿った減速特性での減速中にクラッチペダル51の踏み込み操作が行われた場合にも、クラッチ50が再び完全係合状態になるまでクラッチペダル51の踏み込み操作の開始時点の回生制動力のまま一定に保たせる。走行抵抗の特性に沿った減速特性で減速していても、クラッチ50の解放操作に伴うエンジンブレーキによる制動力の減少を運転者が感知し易い場面もあるので、そのエンジンブレーキによる制動力の変化に合わせて回生制動力を発生させることで、運転者が減速特性に違和感を覚え難くなるからである。
以下、この制御システムの動作説明を図6のフローチャートに基づき行う。
先ず、ハイブリッドECU100は、走行中で且つモータ/ジェネレータ20が回生駆動中であるのか否かを判定する(ステップST1)。走行中か否かについては、例えば車速センサ等の車速検出装置81の検出信号や車輪速センサ82の検出信号などに基づき判断すればよい。また、回生駆動中か否かについては、例えばモータ/ジェネレータECU102がモータ/ジェネレータ20に対して行っている制御指令の内容に基づき判断すればよい。
ハイブリッドECU100は、走行中でないと判断した場合や、回生駆動中でないと判断した場合、本演算処理を一旦終わらせて、このステップST1の判定を繰り返す。
一方、走行中であり且つ回生駆動中であると判定された場合、ハイブリッドECU100は、エンジンブレーキによる制動力と走行抵抗による制動力の内、どちらが車両の減速特性に及ぼす影響が大きいのか否かを判断する(ステップST2)。ここでは、エンジンブレーキによる制動力の方が走行抵抗による制動力よりも影響が大きいのか否かを判定している。
前述したように、エンジンブレーキの特性は、そのときの車速と手動変速機30の変速段によって決まる。これが為、例えば、ハイブリッドECU100の記憶部には、車速に対するエンジンブレーキによる制動力を示す図4の如きマップを変速段毎に用意しておく。これにより、ハイブリッドECU100は、現在の車速と変速段とに基づいて、今のエンジンブレーキによる制動力を求めることができる。
更に、走行抵抗の特性は、前述したように、主に、車両重量、路面の摩擦係数、路面の勾配、空気抵抗、車速によって決まる。車両重量や空気抵抗(所謂空気抵抗係数)は、車両の諸元として予め把握できる。また、路面の摩擦係数は、例えば車輪速センサ82の検出信号に基づき求めた車輪のスリップ率等から把握できる。また、路面の勾配は、車両前後加速度を検出する前後加速度センサ83の検出信号に基づいて把握できる。これが為、例えば、ハイブリッドECU100の記憶部には、車速に対する走行抵抗による制動力を示す図5の如きマップを路面の摩擦係数や勾配に応じて用意しておく。これにより、ハイブリッドECU100は、現在の車速と路面の摩擦係数及び勾配とに基づいて、今の走行抵抗による制動力を求めることができる。
ステップST2においては、そのエンジンブレーキによる制動力と走行抵抗による制動力とを比較させ、制動力の大きい方が車両の減速特性に及ぼす影響が大きいと判断させる。
ステップST2においてエンジンブレーキによる制動力の方が車両の減速特性に及ぼす影響が大きいと判断された場合、ハイブリッドECU100は、モータ/ジェネレータ20による回生制動力の出力特性をエンジンブレーキの特性に合わせるように設定する(ステップST3)。一方、走行抵抗による制動力の方が車両の減速特性に及ぼす影響が大きいと判断された場合、ハイブリッドECU100は、モータ/ジェネレータ20による回生制動力の出力特性を走行抵抗の特性に合わせるように設定する(ステップST4)。
ハイブリッドECU100は、運転者がクラッチ50の解放操作を開始したのか否か(クラッチ50が解放動作を開始したのか否か)を判定する(ステップST5)。その判定には、クラッチペダル51に取り付けられたペダル操作検出装置84の検出信号を利用する。そのペダル操作検出装置84としては、例えば、クラッチペダル51の踏み込み操作に伴いオン信号が出力されるスイッチセンサ、クラッチペダル51の位置又は操作量を検出するペダル位置センサ等が考えられる。
ハイブリッドECU100は、クラッチ50の解放操作が開始されていなければ、ステップST3又はST4で設定された出力特性に基づき回生制動力を出力させる(ステップST6)。その際、ハイブリッドECU100は、その出力特性に応じた回生制動力を発生させるようモータ/ジェネレータECU102に制御指令を送る。そして、モータ/ジェネレータECU102は、その回生制動力を発生させる為の回生トルクをモータ/ジェネレータ20に出力させる。その回生制動力(回生トルク)の大きさは、前述した減速開始時の回生制動力(回生トルク)の初期値の大きさによって決まる。
このハイブリッドECU100は、その後、ステップST1に戻り、同様の演算処理を行う。その際、設定されている回生制動力の出力特性に変わりがなく、クラッチ50の解放操作が開始されていなければ、ステップST6では、これまでと同様の出力特性に応じた回生制動力を発生させる。これにより、ハイブリッド車両1は、回生制動力を発生させないときと同様の減速特性で減速する。例えば、図7のタイムチャートのA区間には、クラッチ50が完全係合状態のときの回生制動力の出力特性であって、エンジンブレーキの特性に相似させて出力させた回生制動力について例示している。
一方、ステップST2で制動力の大小関係が入れ替わったときには、新たな回生制動力の出力特性がステップST3又はST4で設定される。このときには、クラッチ50の解放操作が開始されていなければ、ステップST6で新たな出力特性に応じた回生制動力を出力させる。この場合のハイブリッド車両1は、その回生制動力の有無に拘わらず、エンジンブレーキ又は走行抵抗による制動力での減速特性の内の一方で減速し、ステップST2で制動力の大小関係が入れ替わったときに、他方の減速特性で減速する。つまり、この場合においても、ハイブリッド車両1は、回生制動力を発生させないときと同様の減速特性で減速する。
また、ステップST5でクラッチ50の解放操作が開始されたと判定した場合、ハイブリッドECU100は、その開始時点の回生制動力F1をクラッチ50の解放操作中の回生制動力Fとして設定し(ステップST7)、その回生制動力を出力させる(ステップST8)。図7のタイムチャートにおいて、B区間にはクラッチ50が半係合状態のときの回生制動力、C区間にはクラッチ50が解放状態のときの回生制動力を例示している。このように、クラッチ50の解放操作中には(つまりクラッチ50が再び完全係合状態になるまでは)、解放操作開始時点の回生制動力F1が出力され続ける。従って、ハイブリッド車両1は、クラッチ50の解放操作中においても、回生制動力を発生させないときと同様の減速特性で減速する。
尚、クラッチ50が再び完全係合された場合には、そのときに走行中で且つ回生駆動中であれば、上記の演算処理が行われた後、ステップST6において回生制動力が出力される。
以上示したように、この制御システムは、その時点の車両の減速動作に強い影響力を及ぼすエンジンブレーキの特性又は走行抵抗の特性を把握して、その特性に相似する出力特性の回生制動力を出力させるので、回生制動力を出力させずに減速させるときと同様の減速特性でハイブリッド車両1を減速させることができる。また、この制御システムは、クラッチ50の解放操作中において、エンジンブレーキによる制動力の変化に合わせ、その解放操作の開始時の回生制動力を一定に保って出力させるので、その際にも、回生制動力を出力させずに減速させるときと同様の減速特性でハイブリッド車両1を減速させることができる。従って、この制御システムは、回生制動力の有無によって運転者が従来感じていた減速特性、つまり減速度の違和感を抑えることができる。
ここで、走行抵抗の特性に沿った減速特性での減速中にクラッチペダル51の踏み込み操作が行われた場合、この制御システムは、次のように回生制動力を制御してもよい。この場合、減速特性については、エンジンブレーキによる制動力の減少と共に、走行抵抗の影響が強くなっていく。これが為、この場合には、エンジンブレーキによる制動力の変化に拘わらず、クラッチ50が係合されているときと同様に、走行抵抗の特性に相似させた出力特性で回生制動力を発生させてもよい。このように回生制動力を制御しても、ハイブリッド車両1は、クラッチ50の解放操作中においても、回生制動力の有無によって運転者が従来感じていた減速特性、つまり減速度の違和感を抑えることができる。
ところで、本実施例では手動により断接動作が為される動力断接部(クラッチ50)を例示したが、その動力断接部は、自動で断接動作が為されるものでもよい。その場合においても、電子制御装置は、動力断接部を自動的に解放させる動作のときに、上述した手動でクラッチ50を解放させるときと同様の演算処理動作を行うことができ、手動の際と同様の効果を得ることができる。
1 ハイブリッド車両
10 エンジン
20 モータ/ジェネレータ
25 二次電池
30 手動変速機
50 クラッチ
51 クラッチペダル
71 変速操作装置
75 アクセルペダル
81 車速検出装置
82 車輪速センサ
83 前後加速度センサ
84 ペダル操作検出装置
100 ハイブリッドECU
101 エンジンECU
102 モータ/ジェネレータECU
WL,WR 駆動輪
10 エンジン
20 モータ/ジェネレータ
25 二次電池
30 手動変速機
50 クラッチ
51 クラッチペダル
71 変速操作装置
75 アクセルペダル
81 車速検出装置
82 車輪速センサ
83 前後加速度センサ
84 ペダル操作検出装置
100 ハイブリッドECU
101 エンジンECU
102 モータ/ジェネレータECU
WL,WR 駆動輪
Claims (3)
- 機械エネルギを動力とする機械動力源、電気エネルギを変換した機械エネルギを動力とする電気動力源、及び前記機械動力源と駆動輪との間の動力伝達を断接可能な動力断接部を備えた車両の制御システムにおいて、
減速の際に、前記機械動力源のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させて前記電気動力源による回生制動力を発生させることを特徴とした車両の制御システム。 - 前記相似とは、前記何れか一方の制動力の車速低下に伴う出力特性に前記回生制動力の出力特性を一致させる場合、及び、運転者が前記回生制動力の有無に拘わらず車両の減速特性に違和感を覚えない範囲内で、前記何れか一方の制動力の車速低下に伴う出力特性よりも前記回生制動力を車速低下に伴い大きく変化させる又は小さく変化させる出力特性の場合であることを特徴とした請求項1記載の車両の制御システム。
- 前記動力断接部による前記機械動力源と駆動輪との間の動力伝達の切断動作中及び当該動力伝達の切断中には、該切断動作の開始時の回生制動力を出力させることを特徴とした請求項1又は2に記載の車両の制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010290940A JP2012136191A (ja) | 2010-12-27 | 2010-12-27 | 車両の制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010290940A JP2012136191A (ja) | 2010-12-27 | 2010-12-27 | 車両の制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012136191A true JP2012136191A (ja) | 2012-07-19 |
Family
ID=46673995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010290940A Withdrawn JP2012136191A (ja) | 2010-12-27 | 2010-12-27 | 車両の制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012136191A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014057417A (ja) * | 2012-09-12 | 2014-03-27 | Mazda Motor Corp | 車両用制御装置 |
| WO2015057422A1 (en) * | 2013-10-14 | 2015-04-23 | Borgwarner Inc. | Electrical boosting device |
| US9020676B2 (en) | 2012-12-07 | 2015-04-28 | Hyundai Motor Company | Method and system for controlling drive torque of vehicle |
| WO2016080224A1 (ja) * | 2014-11-19 | 2016-05-26 | いすゞ自動車株式会社 | ハイブリッド車両の制御方法 |
| WO2017169522A1 (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | ハイブリッド鞍乗り型車両 |
-
2010
- 2010-12-27 JP JP2010290940A patent/JP2012136191A/ja not_active Withdrawn
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014057417A (ja) * | 2012-09-12 | 2014-03-27 | Mazda Motor Corp | 車両用制御装置 |
| US9020676B2 (en) | 2012-12-07 | 2015-04-28 | Hyundai Motor Company | Method and system for controlling drive torque of vehicle |
| WO2015057422A1 (en) * | 2013-10-14 | 2015-04-23 | Borgwarner Inc. | Electrical boosting device |
| WO2016080224A1 (ja) * | 2014-11-19 | 2016-05-26 | いすゞ自動車株式会社 | ハイブリッド車両の制御方法 |
| JP2016097730A (ja) * | 2014-11-19 | 2016-05-30 | いすゞ自動車株式会社 | ハイブリッド車両の制御方法 |
| WO2017169522A1 (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | ハイブリッド鞍乗り型車両 |
| JPWO2017169522A1 (ja) * | 2016-03-31 | 2018-10-04 | 本田技研工業株式会社 | ハイブリッド鞍乗り型車両 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6096288B2 (ja) | ハイブリッド車両の制御装置 | |
| CN103260982B (zh) | 混合动力车辆的发动机启动控制装置 | |
| JP5471829B2 (ja) | ハイブリッド車両のアクセルペダル踏力制御装置 | |
| CN104203616B (zh) | 用于对混合动力车辆的电池再充电的方法 | |
| WO2011048636A1 (ja) | 車両の制御装置 | |
| JP2007069787A (ja) | ハイブリッド車両の減速制御装置 | |
| JP6012026B2 (ja) | 車両の制御装置 | |
| CN103476656B (zh) | 混合动力电动车辆以及控制混合动力电动车辆的方法 | |
| CN102869528A (zh) | 车辆的变速指示系统 | |
| JP2015519241A5 (ja) | ||
| JP5918464B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2012136191A (ja) | 車両の制御システム | |
| JP5691389B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2011005904A (ja) | ハイブリッド車両の制御装置 | |
| JP2011183847A (ja) | 車両の制御装置 | |
| JP6027380B2 (ja) | 電気自動車の駆動装置 | |
| CN103180190B (zh) | 车辆的动力传递控制装置 | |
| JP5327177B2 (ja) | 車両の制御システム | |
| JP5648739B2 (ja) | 車両の制御システム | |
| JP2012062027A (ja) | 車両の制御システム | |
| JP6593045B2 (ja) | ハイブリッド車両及びその制御方法 | |
| JP2010179711A (ja) | ハイブリッド車両 | |
| JP5141535B2 (ja) | ハイブリッド車両の制御装置 | |
| CN105522907A (zh) | 车辆 | |
| JP4455572B2 (ja) | ハイブリッド車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140304 |