JP2012141691A - 映像処理装置 - Google Patents
映像処理装置 Download PDFInfo
- Publication number
- JP2012141691A JP2012141691A JP2010292711A JP2010292711A JP2012141691A JP 2012141691 A JP2012141691 A JP 2012141691A JP 2010292711 A JP2010292711 A JP 2010292711A JP 2010292711 A JP2010292711 A JP 2010292711A JP 2012141691 A JP2012141691 A JP 2012141691A
- Authority
- JP
- Japan
- Prior art keywords
- feature point
- video
- video processing
- unit
- analysis target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
【解決手段】移動体に搭載された撮影装置の映像情報を処理する映像処理方法であって、前記撮影装置にて撮影した映像情報から分析対象を検出し、前記分析対象の情報に基づいて、前記映像情報の状態判定を行い、前記判定結果を出力する。なお、前記分析対象の情報は、分析対象の検出継続時間を検出することや所定期間内に検出した前記分析対象の検出継続時間の統計量を算出することでも良い。
【選択図】図1
Description
移動体に搭載された撮影装置の映像情報を処理する装置であって、
前記撮影装置にて撮影した映像情報から分析対象を検出する分析対象検出部と、
前記分析対象検出部で検出された分析対象の情報に基づいて、映像情報の状態判定を行う状態判定部と、
前記判定結果を出力する出力制御部と、
を備える。
移動体に搭載された撮影装置の映像情報を処理する方法であって、
前記撮影装置にて撮影した映像情報から分析対象を検出するステップと、
前記分析対象の情報に基づいて、前記映像情報の状態判定を行うステップと、
前記判定結果を出力するステップと、
をコンピュータが実行する。
図1は、本実施形態における映像処理装置10の概略構成図である。図1に示すように、映像処理装置10は、分析対象検出部1、状態判定部2、出力制御部3を備え、撮影装
置5で撮影した映像情報を処理し、映像処理部4を介して表示装置113に表示させる。これにより映像処理装置10は死角部分の表示や死角から追い抜く二輪車のように接近してくる物体を強調表示する等、ドライバの視覚による確認をサポートする。
置されている。
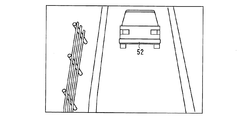
あり、映像情報内に前方の車両52を捉えている例を示している。
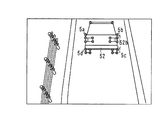
から撮影した映像情報の例を図9に示した。このように前方の車両52と接近すると、前方の車両上の特徴点の位置が変化する。特徴点観測部12は、変化した各特徴点の位置を求め、分析対象特定部13がこの特徴点の位置の変化に基づいて接近物を検出する。即ち、分析対象特定部13は、特徴点5a−5dが、図8と比べて図9では画像の下方へ移動すると共に、各特徴点5a−5dの間、例えば特徴点5b−5cの間52bが長くなったこと
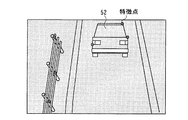
から、接近物であることを検出する。出力制御部3は、この接近物の特徴点を囲む矩形を当該映像情報に合成することにより、接近物を強調表示させる。図10は、接近物である前方の車両52を矩形53で囲んで強調表示した例を示している。
Gate Array]、ASIC[Application Specific Integrated Circuit]、LSI[Large Scale Integration]といった回路を備えても良い。また、当該ハードウェアは、IC
[Integrated Circuit]、ゲートアレイ、論理回路、信号処理回路、アナログ回路といった基本的な回路を備えても良い。
図2は、上記構成の映像処理装置10が実行する映像処理方法の説明図である。
車両のイグニッションキーがON又はACC位置となり、電力が供給されると、先ず、撮影装置5が撮影を開始し、分析対象検出部1が映像情報を受信し、分析対象、本例では特徴点を求める(ステップ10)。特徴点の検出方法としては、harrisオペレータなどが知られているが、これに限らない。例えば、輪郭を抽出する方法でも良い。
分析対象特定部13は、例えば図19に示すフレームと、図20に示すフレームとを比較した場合、図19のフレームで検出した特徴点8a〜9kについて、それぞれ移動が想定される所定範囲(破線の円)をそれぞれ設定する。そして、分析対象特定部13は、図20のフレームにおいて前記所定範囲内に検出された特徴点8b,8g,8hについては連続性があるため継続する特徴点と判断し、特徴点9a〜9iは連続性がないため継続しない特徴点としてカウントする。
図3は、実施形態2の映像処理装置の機能ブロック図、図4は、実施形態2の映像処理方法の説明図である。本実施形態2では、分析対象検出部1がエッジ強度分布算出部14を備え、状態判定部2が、ステップ21,61(において、照度が低いか否かをエッジ強度分布を用いて判定した構成が前述の実施形態1と異なっており、その他の構成は同じである。
、状態判定部2はカメラ5の故障か照度が低いと判定し(ステップ25)、出力制御部3は映像処理部4に通知して映像処理を停止すると共に、視覚による確認のサポート機能を提供できない旨の表示をするなど、ドライバに対するメッセージを出力する(ステップ25)。
図5は、本発明の映像処理装置を備えた車載用オーディオ・ビジュアル・ナビゲーション一体機(以降、AVN一体機と称する)について説明する。
うディスク再生部で、光学ピックアップ(データ取得部)、ピックアップ・ディスク駆動機構、ピックアップ・ディスク駆動機構の制御回路、フレーム管理回路、復号回路等により構成される。そして、ディスク再生部104は制御部100からの制御信号により、そ
のオン/オフ、読込み位置の指定等の各種動作が制御される。
カメラ5の故障や、カメラ5のレンズの汚れ、露光不足等で適切な画像情報が得られない場合に、前述のサポートが行えない旨のメッセージを外部音声/映像入力部118を介して表示装置113に表示させたり、スピーカ111から音声出力させたりする。
可能なフラッシュメモリ等により構成される。
方向に応じた信号を出力するロータリエンコーダ、感圧センサにより構成され傾動操作方向に応じた信号を出力するジョイスティック等の傾動センサ、押圧操作によりオンオフ状態が変化する押圧スイッチにより構成される。リモコン116で検出した操作信号は、リモコン送受信部117に送られ、制御部100に入力される。
101 読み書き部
10 映像処理装置
1 分析対象検出部
2 状態判定部
3 出力制御部
4 映像処理部
5 撮影装置
113 表示装置
Claims (11)
- 移動体に搭載された撮影装置の映像情報を処理する映像処理装置であって、
前記撮影装置にて撮影した映像情報から分析対象を検出する分析対象検出部と、
前記分析対象検出部で検出された分析対象の情報に基づいて、映像情報の状態判定を行う状態判定部と、
前記判定結果を出力する出力制御部と、
を備えることを特徴とする映像処理装置。 - 前記分析対象検出部が、分析対象の検出継続時間を検出することを特徴とする請求項1に記載の映像処理装置。
- 前記状態判定部が、所定期間内に検出した前記分析対象の検出継続時間の統計量を算出する、ことを特徴とする請求項2に記載の映像処理装置。
- 前記分析対象検出部は、特徴点検出部と特徴点観測部とを備え、前記特徴点検出部が前記撮影装置より入力される映像情報から特徴点を検出し、前記特徴点観測部が前記特徴点の異なるフレーム間での位置の変動を算出することを特徴とする請求項3に記載の映像処理装置。
- 前記特徴点観測部は、前記特徴点検出部にて検出される特徴点の個数と予め定めた閾値とを比較し、前記特徴点の個数が閾値以下の状態が所定時間続いた場合に、撮影装置が故障している、又は、照度が低い、と判定すること、を特徴とする請求項4に記載の映像処理装置。
- 前記特徴点観測部が、一定の領域に同じ特徴点を検出すること、又は、一定の領域に特徴点が検出されないことを検出した場合に、前記状態判定部は、前記撮影装置のレンズに汚れが付着していると判定すること、を特徴とする請求項4又は5に記載の映像処理装置。
- 前記特徴点観測部より特徴点の動きが無いことを検出した場合に、前記状態判定部は、撮影装置が故障していると判断する、ことを特徴とする請求項4乃至6の何れかに記載の映像処理装置。
- 前記移動体の速度情報に基づき、前記移動体が所定の速度以上で走行していることを検出し、前記特徴点観測部によって前記分析対象の移動と対応する特徴点の動きが無いことを検出した場合に、前記状態判定部は、撮影装置が故障していると判断することを特徴とする請求項7に記載の映像処理装置。
- 前記分析対象検出部は、前記映像情報からエッジ強度分布を算出するエッジ強度分布算出部を備え、
前記状態判定部が、前記エッジ強度分布に基づき周囲照度を判定する、ことを特徴とする請求項1乃至8の何れかに記載の映像処理装置。 - 移動体に搭載された撮影装置の映像情報を処理する映像処理方法であって、
前記撮影装置にて撮影した映像情報から分析対象を検出するステップと、
前記分析対象の情報に基づいて、前記映像情報の状態判定を行うステップと、
前記判定結果を出力するステップと、
をコンピュータが実行する映像処理方法。 - 移動体に搭載された撮影装置の映像情報を処理する映像処理プログラムであって、
前記撮影装置にて撮影した映像情報から分析対象を検出するステップと、
前記分析対象の情報に基づいて、前記映像情報の状態判定を行うステップと、
前記判定結果を出力するステップと、
をコンピュータに実行させるための映像処理プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010292711A JP2012141691A (ja) | 2010-12-28 | 2010-12-28 | 映像処理装置 |
| US13/334,878 US8948925B2 (en) | 2010-12-28 | 2011-12-22 | Video processing device for determining video information status using analysis target specifying unit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010292711A JP2012141691A (ja) | 2010-12-28 | 2010-12-28 | 映像処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012141691A true JP2012141691A (ja) | 2012-07-26 |
Family
ID=46316212
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010292711A Pending JP2012141691A (ja) | 2010-12-28 | 2010-12-28 | 映像処理装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8948925B2 (ja) |
| JP (1) | JP2012141691A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170086165A (ko) * | 2016-01-15 | 2017-07-26 | 에스케이텔레콤 주식회사 | 영상 내 특징점의 움직임 검출 장치 및 방법 |
| WO2018109999A1 (ja) * | 2016-12-16 | 2018-06-21 | クラリオン株式会社 | 区画線認識装置 |
| JP2020064029A (ja) * | 2018-10-19 | 2020-04-23 | 株式会社東芝 | 移動体制御装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103514608B (zh) * | 2013-06-24 | 2016-12-28 | 西安理工大学 | 基于运动注意力融合模型的运动目标检测与提取方法 |
| EP2899692B1 (en) * | 2014-01-28 | 2019-09-04 | Honda Research Institute Europe GmbH | Method, system, imaging device, movable device and program product for detecting static elements in video and image sources |
| JP2017092752A (ja) * | 2015-11-12 | 2017-05-25 | トヨタ自動車株式会社 | 撮像システム |
| JP6772113B2 (ja) * | 2017-08-02 | 2020-10-21 | クラリオン株式会社 | 付着物検出装置、および、それを備えた車両システム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1032908A (ja) * | 1996-07-15 | 1998-02-03 | Fujikura Ltd | 管路内点検装置 |
| JP2000207563A (ja) * | 1999-01-20 | 2000-07-28 | Fujitsu Ten Ltd | 画像認識装置 |
| JP2003168118A (ja) * | 2001-11-29 | 2003-06-13 | Secom Co Ltd | 画像処理装置及び移動体監視装置 |
| JP2003255430A (ja) * | 2002-02-28 | 2003-09-10 | Toshiba Corp | 映像診断装置、車載型映像監視装置の映像診断システム |
| JP2006229341A (ja) * | 2005-02-15 | 2006-08-31 | Sanyo Electric Co Ltd | 撮像装置 |
| JP2008283431A (ja) * | 2007-05-10 | 2008-11-20 | Matsushita Electric Ind Co Ltd | 画像処理装置 |
| WO2009057410A1 (ja) * | 2007-10-30 | 2009-05-07 | Nec Corporation | 路面標示画像処理装置,路面標示画像処理方法及びプログラム |
| JP2010141486A (ja) * | 2008-12-10 | 2010-06-24 | Fujifilm Corp | 画像合成装置、画像合成方法および画像合成プログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3263699B2 (ja) * | 1992-12-22 | 2002-03-04 | 三菱電機株式会社 | 走行環境監視装置 |
| JP3516856B2 (ja) * | 1998-01-30 | 2004-04-05 | 富士重工業株式会社 | 車外監視装置 |
| US7774113B2 (en) * | 2002-04-10 | 2010-08-10 | Trw Limited | Cameras to determine vehicle heading |
| AU2003225228A1 (en) * | 2002-05-03 | 2003-11-17 | Donnelly Corporation | Object detection system for vehicle |
| JP3925488B2 (ja) * | 2003-11-11 | 2007-06-06 | 日産自動車株式会社 | 車両用画像処理装置 |
| JP4557819B2 (ja) | 2005-06-21 | 2010-10-06 | アルパイン株式会社 | 車両周辺情報提供装置 |
| JP4497133B2 (ja) * | 2006-07-12 | 2010-07-07 | アイシン・エィ・ダブリュ株式会社 | 運転支援方法及び運転支援装置 |
| JP5040734B2 (ja) * | 2008-03-05 | 2012-10-03 | ソニー株式会社 | 画像処理装置、画像記録方法およびプログラム |
| JP5355292B2 (ja) * | 2009-08-10 | 2013-11-27 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| US8744168B2 (en) * | 2009-08-24 | 2014-06-03 | Samsung Electronics Co., Ltd. | Target analysis apparatus, method and computer-readable medium |
| JP5241782B2 (ja) * | 2010-07-30 | 2013-07-17 | 株式会社日立製作所 | カメラ異常検出装置を有する監視カメラシステム |
-
2010
- 2010-12-28 JP JP2010292711A patent/JP2012141691A/ja active Pending
-
2011
- 2011-12-22 US US13/334,878 patent/US8948925B2/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1032908A (ja) * | 1996-07-15 | 1998-02-03 | Fujikura Ltd | 管路内点検装置 |
| JP2000207563A (ja) * | 1999-01-20 | 2000-07-28 | Fujitsu Ten Ltd | 画像認識装置 |
| JP2003168118A (ja) * | 2001-11-29 | 2003-06-13 | Secom Co Ltd | 画像処理装置及び移動体監視装置 |
| JP2003255430A (ja) * | 2002-02-28 | 2003-09-10 | Toshiba Corp | 映像診断装置、車載型映像監視装置の映像診断システム |
| JP2006229341A (ja) * | 2005-02-15 | 2006-08-31 | Sanyo Electric Co Ltd | 撮像装置 |
| JP2008283431A (ja) * | 2007-05-10 | 2008-11-20 | Matsushita Electric Ind Co Ltd | 画像処理装置 |
| WO2009057410A1 (ja) * | 2007-10-30 | 2009-05-07 | Nec Corporation | 路面標示画像処理装置,路面標示画像処理方法及びプログラム |
| JP2010141486A (ja) * | 2008-12-10 | 2010-06-24 | Fujifilm Corp | 画像合成装置、画像合成方法および画像合成プログラム |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170086165A (ko) * | 2016-01-15 | 2017-07-26 | 에스케이텔레콤 주식회사 | 영상 내 특징점의 움직임 검출 장치 및 방법 |
| WO2018109999A1 (ja) * | 2016-12-16 | 2018-06-21 | クラリオン株式会社 | 区画線認識装置 |
| JP2018097782A (ja) * | 2016-12-16 | 2018-06-21 | クラリオン株式会社 | 区画線認識装置 |
| US11373417B2 (en) | 2016-12-16 | 2022-06-28 | Clarion Co., Ltd. | Section line recognition device |
| JP2020064029A (ja) * | 2018-10-19 | 2020-04-23 | 株式会社東芝 | 移動体制御装置 |
| JP7278740B2 (ja) | 2018-10-19 | 2023-05-22 | 株式会社東芝 | 移動体制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8948925B2 (en) | 2015-02-03 |
| US20120162407A1 (en) | 2012-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012141691A (ja) | 映像処理装置 | |
| US8890674B2 (en) | Driver assistance detection system | |
| JP2025137538A (ja) | 情報記録装置、情報記録方法及び情報記録用プログラム | |
| US10991086B2 (en) | Adhered substance detection apparatus | |
| JP6962712B2 (ja) | 車載画像記録装置 | |
| US9140716B2 (en) | Display system for vehicle and vehicle | |
| JP7057074B2 (ja) | 車載器および運転支援装置 | |
| JP5076819B2 (ja) | 車両運転支援装置および車両運転支援方法 | |
| US11967007B2 (en) | Vehicle surroundings information displaying system and vehicle surroundings information displaying method | |
| JP4427366B2 (ja) | 車載表示装置及び車載表示システム | |
| JP6552285B2 (ja) | 車載表示装置及び車両後方映像表示方法 | |
| JP6949278B2 (ja) | 運転支援装置、運転支援システムおよび運転支援方法 | |
| US11100353B2 (en) | Apparatus of controlling region of interest of image and method for controlling the same | |
| JP2017188761A (ja) | 車両周辺表示装置及び車両周辺表示方法 | |
| US12085404B2 (en) | Vehicle surroundings information displaying system and vehicle surroundings information displaying method | |
| JP2020013369A (ja) | 運転支援装置、運転支援システム、及び運転支援プログラム | |
| JP6188468B2 (ja) | 画像認識装置、ジェスチャ入力装置及びコンピュータプログラム | |
| JP2023093846A (ja) | 駐車支援装置、及び駐車支援方法 | |
| JP7357784B2 (ja) | 警報制御装置及び警報制御方法 | |
| KR20140099613A (ko) | 블랙박스 겸용 avn시스템 | |
| JPWO2020013052A1 (ja) | 運転支援装置、運転支援方法、及びプログラム | |
| JP2006276964A (ja) | 車両用表示装置 | |
| CN120792854A (zh) | 一种新手司机驾驶辅助方法及系统 | |
| JP2025005035A (ja) | 車両周囲監視システム、車両周囲監視装置、車両周囲監視方法 | |
| JP2023063062A (ja) | 車載表示装置、制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150217 |