JP2012145493A - 物理量センサー及び電子機器 - Google Patents
物理量センサー及び電子機器 Download PDFInfo
- Publication number
- JP2012145493A JP2012145493A JP2011004998A JP2011004998A JP2012145493A JP 2012145493 A JP2012145493 A JP 2012145493A JP 2011004998 A JP2011004998 A JP 2011004998A JP 2011004998 A JP2011004998 A JP 2011004998A JP 2012145493 A JP2012145493 A JP 2012145493A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- movable mass
- movable
- arm
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 claims abstract description 59
- 238000001514 detection method Methods 0.000 claims abstract description 57
- 238000006073 displacement reaction Methods 0.000 claims description 18
- 238000005520 cutting process Methods 0.000 claims description 6
- 230000035945 sensitivity Effects 0.000 abstract description 7
- 230000001133 acceleration Effects 0.000 description 55
- 230000008859 change Effects 0.000 description 22
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 11
- 229910052710 silicon Inorganic materials 0.000 description 11
- 239000010703 silicon Substances 0.000 description 11
- 238000010586 diagram Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 230000002441 reversible effect Effects 0.000 description 5
- 230000000737 periodic effect Effects 0.000 description 4
- 238000005530 etching Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000010453 quartz Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images












Landscapes
- Gyroscopes (AREA)
Abstract
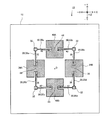
【解決手段】ベース基板12上の第1軸の方向に配置され、振動可能な一対の第1可動質量部(34A、34B)と、第2軸の方向に配置され、振動可能な一対の第2可動質量部(40A、40B)と、第1可動質量部及び第2可動質量部を互いに逆相に振動させる振動手段と、第1可動質量部及び第2可動質量部の少なくとも一方に設けられ、3軸のうち少なくとも一つの軸回りに発生する力を検知する力検出手段とを備え、第1可動質量部には、第2軸の両方向に延出する第1アーム28が設けられ、第2可動質量部には、第1軸の両方向に延出する第2アーム30が設けられ、第1アーム28及び第2アーム30は、両アームが交わる位置に配置され、且つベース基板12に固定された支持部32により支持されている。
【選択図】図1
Description
上記構成により、高いQ値を有するとともに小型化が可能な物理量センサーとなる。
上記構成により、高いQ値を有するとともに小型化が可能な物理量センサーとなる。
上記構成により、第1可動質量部、第2可動質量部を効率よく振動させて駆動電力を抑制することができる。
上記構成により、例えば対向する電極間の静電引力により、各可動質量部を振動させることができ、各可動質量部の振動手段の領域を省スペース化することができる。
上記構成により、第1アーム、第2アームが長くなり曲げやすくなるので、振動手段の駆動電力を抑制することができる。
上記構成により、前記第1可動質量部、前記第2可動質量部の質量を確保しつつ小型化を図ることができる。さらに外形が略矩形となるので、実装側に無駄なスペースを形成することを回避することができる。
一方、第1軸回りの角速度を受けた場合、一対の第2可動質量部は互いに逆相となるように振動しているので、第2可動質量部の各々に設けられた可動板は互いに反対方向のコリオリ力を受け、互いに反対方向に変位する。また第2軸回りの角速度を受けた場合、一対の第1可動質量部も互いに逆相となるように振動しているので、第1可動質量部の各々に設けられた可動板は互いに反対方向のコリオリ力を受け、互いに反対方向に変位する。
したがって、上記構成により第1軸回りの角速度、第2軸回りの角速度、第3軸に平行な方向の加速度の少なくとも一つを検知することができる。
上記構成により、第1可動質量部、第2可動質量部を効率よく振動させて駆動電力を抑制することができる。
上記構成により、第1アーム及び第2アームを所定の方向にのみ振動させることができ、検出感度を高めることができる。
上記構成により、第1可動質量部、第2可動質量部を効率よく振動させて駆動電力を抑制することができる。
これにより、高精度なセンシング機能を有するとともに小型化が可能な電子機器を実現できる。
Claims (13)
- 互いに直交する3つの軸を、第1軸、第2軸、第3軸としたとき、
基板上の前記第1軸の方向に配置され、前記第1軸の方向に振動可能な一対の第1可動質量部と、
前記基板上の前記第2軸の方向に配置され、前記第2軸の方向に振動可能な一対の第2可動質量部と、
前記一対の第1可動質量部及び前記一対の第2可動質量部の少なくとも一方をそれぞれ互いに逆相に振動させる振動手段と、
前記第1可動質量部及び前記第2可動質量部の少なくとも一方に設けられ、前記第1軸乃至前記第3軸の少なくとも一つの軸回りに発生する力を検知する力検出手段と、を備え、
前記第1可動質量部には、前記第1可動質量部から前記第2軸の両方向に延出する第1アームが設けられ、
前記第2可動質量部には、前記第2可動質量部から前記第1軸の両方向に延出する第2アームが設けられ、
前記第1アーム及び前記第2アームは、前記第1アームと前記第2アームとが交わる位置に配置され且つ前記基板に固定された支持部により支持されたことを特徴とする物理量センサー。 - 前記振動手段は、前記第1可動質量部と前記第2可動質量部とを互いに逆相で振動させることを特徴とする請求項1に記載の物理量センサー。
- 前記振動手段は、前記第1可動質量部と前記第2可動質量部とを互いに同相で振動させることを特徴とする請求項1に記載の物理量センサー。
- 前記振動手段は、前記第1可動質量部と前記第1アームとの振動系の振動と、前記第2可動質量部と前記第2アームとの振動系の振動と、を結合したモードで振動させることを特徴とする請求項1乃至3のいずれか1項に記載の物理量センサー。
- 前記振動手段は、静電駆動方式の駆動手段を有していることを特徴とする請求項1乃至4のいずれか1項に記載の物理量センサー。
- 前記第1可動質量部は、前記第2軸の方向に切り込みを入れて形成された第1括れ部の両端から前記第1アームが延出し、
前記第2可動質量部は、前記第1軸の方向に切り込みを入れて形成された第2括れ部の両端から前記第2アームが延出したことを特徴とする請求項1乃至5のいずれか1項に記載の物理量センサー。 - 前記第1可動質量部及び前記第2可動質量部は、それぞれ三角形型であり、前記一対の第1可動質量部及び前記一対の第2可動質量部を配置したときに外形が略矩形となることを特徴とする請求項1乃至6のいずれか1項に記載の物理量センサー。
- 前記力検出手段は、
前記第1可動質量部および前記第2可動質量部の少なくとも一方に設けられ、各可動質量部の振動方向に平面視で垂直な方向に回転軸を有し、前記第3軸の方向に変位可能な可動板と、
前記可動板に設けた第1可動電極部と、
前記基板の前記第1可動電極部に対向する位置に配置された第1固定電極部と、を備え、
前記可動板の変位により、前記第1軸および前記第2軸の少なくとも一方の軸回りの発生する力を検出することを特徴とする請求項1乃至7のいずれか1項に記載の物理量センサー。 - 前記力検出手段は、
前記可動質量部及び前記第2可動質量部の少なくとも一方に設けられ、各可動質量部の振動の方向に平面視で垂直な方向に伸縮自在な可撓部と、
前記可撓部に支持された可動部と、
前記可動部に設けられた第2可動電極部と、
前記基板上に配置され、前記第2可動電極部に対向する位置に配置された第2固定電極部と、を備え、
前記可動部の変位により、前記第3軸の軸回りに発生する力を検出することを特徴とする請求項1乃至8のいずれか1項に記載の物理量センサー。 - 前記支持部の各々は、互いに鏡像対称に配置されていることを特徴とする請求項1乃至9のいずれか1項に記載の物理量センサー。
- 前記第1アームは、前記第1軸の方向には振動し易く、且つ、前記第2軸及び前記第3軸には振動し難く、
前記第2アームは、前記第2軸の方向には振動し易く、且つ、前記第1軸及び前記第3軸には振動し難いことを特徴とする請求項1乃至10のいずれか1項に記載の物理量センサー。 - 互いに直交する3つの軸を、第1軸、第2軸、第3軸としたとき、
基板上に前記第1軸の方向に配置され、前記第1軸の方向に振動可能な一対の第1可動質量部と、
前記基板上に前記第2軸の方向に配置され、前記第2軸の方向に振動可能な一対の第2可動質量部と、
前記第1可動質量部及び前記第2可動質量部の少なくとも一方に設けられ、前記第1軸乃至前記第3軸の少なくとも一つの軸回りに発生する力を検知する力検出手段と、を備え、
前記第1可動質量部には、前記第1可動質量部から前記第2軸の両方向に延出する第1アームが設けられ、
前記第2可動質量部には、前記第2可動質量部から前記第1軸の両方向に延出する第2アームが設けられ、
前記第1可動質量部及び前記第2可動質量部は、それぞれ前記第1アームと前記第2アームとが交わる位置で前記基板に固定されており、且つ、前記第1可動質量部の振動と前記第2可動質量部の振動とを結合したモードで振動することを特徴とする物理量センサー。 - 請求項1乃至12のいずれか1項に記載の物理量センサーを搭載したことを特徴とする電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004998A JP5790915B2 (ja) | 2011-01-13 | 2011-01-13 | 物理量センサー及び電子機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011004998A JP5790915B2 (ja) | 2011-01-13 | 2011-01-13 | 物理量センサー及び電子機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012145493A true JP2012145493A (ja) | 2012-08-02 |
| JP2012145493A5 JP2012145493A5 (ja) | 2014-02-27 |
| JP5790915B2 JP5790915B2 (ja) | 2015-10-07 |
Family
ID=46789182
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011004998A Active JP5790915B2 (ja) | 2011-01-13 | 2011-01-13 | 物理量センサー及び電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5790915B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014083843A1 (ja) * | 2012-11-29 | 2014-06-05 | 株式会社デンソー | ジャイロセンサおよびジャイロセンサを有する複合センサ |
| WO2017130312A1 (ja) * | 2016-01-27 | 2017-08-03 | 株式会社日立製作所 | ジャイロスコープ |
| EP3916354A1 (en) * | 2020-05-25 | 2021-12-01 | Murata Manufacturing Co., Ltd. | Gyroscope with peripheral detection |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001508537A (ja) * | 1996-10-21 | 2001-06-26 | ビーティージー・インターナショナル・リミテッド | ソリッドステート多軸ジャイロスコープ |
| JP2007509346A (ja) * | 2003-10-20 | 2007-04-12 | インベンセンス インコーポレイテッド | 垂直方向に集積した電子回路およびウェハ・スケール密封包装を含むx−y軸二重質量音叉ジャイロスコープ |
| JP2009529697A (ja) * | 2006-03-10 | 2009-08-20 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング | 微小機械回転速度センサ |
| JP2009529666A (ja) * | 2006-03-10 | 2009-08-20 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 連結棒を有する回転速度センサ |
| WO2009107573A1 (ja) * | 2008-02-25 | 2009-09-03 | アルプス電気株式会社 | 角速度センサ |
| WO2009156485A1 (de) * | 2008-06-27 | 2009-12-30 | Sensordynamics Ag | Mikro-gyroskop |
-
2011
- 2011-01-13 JP JP2011004998A patent/JP5790915B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001508537A (ja) * | 1996-10-21 | 2001-06-26 | ビーティージー・インターナショナル・リミテッド | ソリッドステート多軸ジャイロスコープ |
| JP2007509346A (ja) * | 2003-10-20 | 2007-04-12 | インベンセンス インコーポレイテッド | 垂直方向に集積した電子回路およびウェハ・スケール密封包装を含むx−y軸二重質量音叉ジャイロスコープ |
| JP2009529697A (ja) * | 2006-03-10 | 2009-08-20 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング | 微小機械回転速度センサ |
| JP2009529666A (ja) * | 2006-03-10 | 2009-08-20 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 連結棒を有する回転速度センサ |
| WO2009107573A1 (ja) * | 2008-02-25 | 2009-09-03 | アルプス電気株式会社 | 角速度センサ |
| WO2009156485A1 (de) * | 2008-06-27 | 2009-12-30 | Sensordynamics Ag | Mikro-gyroskop |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014083843A1 (ja) * | 2012-11-29 | 2014-06-05 | 株式会社デンソー | ジャイロセンサおよびジャイロセンサを有する複合センサ |
| JP2014130129A (ja) * | 2012-11-29 | 2014-07-10 | Denso Corp | ジャイロセンサ |
| US9696158B2 (en) | 2012-11-29 | 2017-07-04 | Denso Corporation | Gyro sensor and composite sensor comprising gyro sensor |
| WO2017130312A1 (ja) * | 2016-01-27 | 2017-08-03 | 株式会社日立製作所 | ジャイロスコープ |
| JPWO2017130312A1 (ja) * | 2016-01-27 | 2018-07-05 | 株式会社日立製作所 | ジャイロスコープ |
| US10809061B2 (en) | 2016-01-27 | 2020-10-20 | Hitachi, Ltd. | Vibratory gyroscope including a plurality of inertial bodies |
| EP3916354A1 (en) * | 2020-05-25 | 2021-12-01 | Murata Manufacturing Co., Ltd. | Gyroscope with peripheral detection |
| JP2022000627A (ja) * | 2020-05-25 | 2022-01-04 | 株式会社村田製作所 | 周囲検出を備えたジャイロスコープ |
| JP7151819B2 (ja) | 2020-05-25 | 2022-10-12 | 株式会社村田製作所 | 周囲検出を備えたジャイロスコープ |
| US11698256B2 (en) | 2020-05-25 | 2023-07-11 | Murata Manufacturing Co., Ltd. | Gyroscope with peripheral detection |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5790915B2 (ja) | 2015-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9038461B2 (en) | Gyro sensor and electronic device | |
| JP4687577B2 (ja) | 慣性センサ | |
| US8549918B2 (en) | Inertial sensors using piezoelectric transducers | |
| US7004024B1 (en) | Horizontal and tuning fork vibratory microgyroscope | |
| US8919199B2 (en) | Apparatus and method for anchoring electrodes in MEMS devices | |
| US9273962B2 (en) | Physical quantity sensor and electronic device | |
| US10032976B2 (en) | Microelectromechanical gyroscopes and related apparatus and methods | |
| US9383205B2 (en) | Vibrator and vibrating gyroscope | |
| JP5790915B2 (ja) | 物理量センサー及び電子機器 | |
| JP6527235B2 (ja) | ジャイロスコープ | |
| JP6733621B2 (ja) | 振動型角速度センサ | |
| JP2012242240A (ja) | ジャイロセンサー、電子機器 | |
| JP6146592B2 (ja) | 物理量センサー、電子機器 | |
| JP5810685B2 (ja) | 振動子および振動ジャイロ | |
| JP2007271320A (ja) | 加速度・角速度検出素子およびその製造方法、ならびに加速度・角速度測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140812 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150708 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150721 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5790915 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |