JP2012150060A - 空洞計測装置及びレーザプローブ装置 - Google Patents
空洞計測装置及びレーザプローブ装置 Download PDFInfo
- Publication number
- JP2012150060A JP2012150060A JP2011010188A JP2011010188A JP2012150060A JP 2012150060 A JP2012150060 A JP 2012150060A JP 2011010188 A JP2011010188 A JP 2011010188A JP 2011010188 A JP2011010188 A JP 2011010188A JP 2012150060 A JP2012150060 A JP 2012150060A
- Authority
- JP
- Japan
- Prior art keywords
- cavity
- laser probe
- measurement
- point data
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】空洞をレーザプローブユニットとレーザ測距装置を用いて計測する際、レーザプローブユニットの初期位置決めを重力に基づいて行う、レーザプローブ装置を作成した。このレーザプローブ装置を用いることで、測定誤差が生じ難く、精度の高い空洞計測を実施することができる。更に、複数の計測データファイルで合成されるべき空洞を、直方体の集まりで近似して格子点データを求めることで、空洞の正確な体積と三次元画像を容易に得ることができる。
【選択図】図1
Description
より詳細には、地中の空洞の形状と体積を迅速に把握するための空洞計測装置と、これに使用するレーザプローブ装置に関する。
空洞を除去するには、空洞の体積を計測した後、空洞を繊維補強コンクリート等で埋める。周知のようにコンクリートは保存が効かないので、空洞を埋めるコンクリートの量は過不足が生じないように予め正確に把握できなければならない。このため、空洞の体積を正確に把握するための計測装置が必要不可欠である。
一方、空洞には様々な形状のものがあるから、空洞の形状及び体積を正確に把握するためには、一つの空洞に対して複数の箇所からレーザプローブを挿入して、形状を把握する必要がある。しかし、複数の計測箇所から空洞の全貌を把握する技術は未だ確立されていない。
図1は、本発明の実施形態の例である、空洞計測装置のブロック図である。
空洞計測装置101は、レーザプローブ装置102と、レーザ測距装置103と、演算装置104よりなる。
レーザプローブ装置102は、空洞内部にレーザプローブユニット105を挿入し、レーザプローブユニット105を所定の位置及び角度に固定する。また、レーザプローブ装置102はレーザプローブユニット105の角度や位置に関する情報を出力する。更に、レーザプローブ装置102には周知のGPS(Global Positioning System)受信機(図示せず)を備え、レーザプローブ装置102の緯度・経度・方位の情報も出力する。
レーザ測距装置103は、レーザプローブ装置102のレーザプローブユニット105に接続され、レーザプローブユニット105を駆動する。そして、レーザプローブユニット105からレーザ光線を発し、反射光から距離情報を算出して、演算装置104へ出力する。
なお、レーザプローブ装置102が出力する情報の詳細については図2、図3、図4及び図5にて後述する。
演算装置104は、所定のOSと空洞計測のためのアプリケーションプログラムが稼働する周知のパソコンである。
座標演算部106が出力する空洞内壁の座標情報は、不揮発性ストレージ107に送られ、不揮発性ストレージ107内の計測データファイル108に記録される。
計測データファイル108の作成が終了すると、ユーザによる操作部109の対話操作によって、計測データファイル108の処理が行われる。操作部109は周知のキーボード及びマウス等のポインティングデバイスである。
次に、格子点データ112の作成が完了すると、立体画像構成部113が格子点データ112に基づいて立体画像を作成する。そして、この作成された立体画像が、体積算出部111が算出した空洞の体積と共に、ディスプレイである表示部114に表示される。
制御部110は操作部109の操作を受けて、座標演算部106、不揮発性ストレージ107、体積算出部111及び立体画像構成部113を制御する。また、レーザプローブ装置102に対して駆動指令情報を出力する。
図2はレーザプローブ装置102の外観斜視図である。
図3(a)及び(b)はレーザプローブ装置102の上面図及び一部断面図である。
レーザプローブ装置102は、基準円盤201と、基準円盤201を回転可能に支持しつつ固定する脚部ともいえる三脚202と、基準円盤201の中心を垂直に貫通するプローブパイプ203と、プローブパイプ203の先端に設けられているレーザプローブユニット105を備える。プローブパイプ203は、レーザプローブユニット105を空洞へ挿入するための棒であり、プローブ支持体ともいえる。
図4(a)は、水平面と基準円盤201の位置関係を示す概略図である。
図4(b)は、水平面と基準円盤201の位置関係を、図4(a)の視点P402から見た図である。
図4(c)は、水平面と基準円盤201の位置関係を、図4(a)の視点P403から見た図である。
図4(e)は、水平面401と基準円盤201の位置関係を、図4(d)の視点P405から見た図である。
この時、水準器204は水平面401と交わっているので、水準器204は水平を検出できている。そして、傾斜計205が基準円盤201の傾斜角を正しく検出できる位置にある。
プローブパイプ203は、基準円盤201を垂直方向に貫通している。プローブパイプ203自体は基準円盤201に対して相対的に回転駆動しないように設けられている。プローブパイプ203の一片にはラック203aが刻まれ、このラック203aにピニオン302を介してステッピングモータである挿抜モータ303が嵌合される。そして、この挿抜モータ303によって、プローブパイプ203は基準円盤201の垂直方向に直線駆動される。挿抜モータ303はステッピングモータであり、駆動パルスの数だけプローブパイプ203は直線駆動される。
この駆動パルスの数を計数することで、プローブパイプ203の先端に設けられているレーザプローブユニット105の、基準円盤201に対する垂直方向の移動量を求めることができる。本明細書において、この移動量のことを「挿入高さ」と呼ぶ。
したがって、この駆動パルスの数を計数することで、プローブパイプ203の先端に設けられているレーザプローブユニット105の、基準円盤201に平行な平面における回転角を求めることができる。本明細書において、この角度を「平面角」と呼ぶ。
この駆動パルスの数を計数することで、プローブパイプ203の先端に設けられているレーザプローブユニット105の、基準円盤201に垂直な平面における回転角を求めることができる。本明細書において、この角度を「仰俯角」と呼ぶ。
・GPS受信機から緯度、経度、方位
・傾斜計205から基準円盤201の傾斜角
・挿抜モータ303に与えるステッピングパルスから求められる挿入高さ
・円周駆動モータ304に与えるステッピングパルスから求められる平面角
・仰俯角モータ305に与えるステッピングパルスから求められる仰俯角
・レーザプローブユニット105を発光駆動するレーザ測距計から、レーザプローブユニット105から空洞内壁までの距離
次に図1に基づいて、演算装置104の構成及びその動作の詳細について説明する。
図1に示すように、演算装置104は、空洞内壁の座標データを算出してファイルに記録する座標演算部106と、格子点データ112を作成して、体積を算出する体積算出部111と、格子点データ112に基づいて立体画像を作成する立体画像構成部113から構成され、三つの演算処理を行う。この格子点データ112は、パソコンという限られた計算機リソース(CPUの演算能力、RAM及び不揮発性ストレージ107の記憶容量等)で体積を迅速に且つ効率良く算出すると共に、立体画像構成部113が立体画像を作成するために利用される。
処理を開始すると(S601)、体積算出部111は、最初に共分散行列と固有ベクトルを用いて、初期直方体データを作成する。初期直方体データは、計測データファイル108によって構成される空洞、すなわち立体を丸ごと覆う直方体形状の立体を示すデータである。そして、この初期直方体データは直方体配列変数に第一レコードとして追記される。この時、分割不可フラグは論理の「偽」に設定される(S602)。
論理が「偽」の分割不可フラグのレコードが存在すれば(S603のYES)、体積算出部111はサブルーチン「直方体判定処理」を実行し(S604)、論理が「偽」の分割不可フラグのレコードが存在しなければ(S603のNO)、体積算出処理を行う(S605)。その後、立体画像構成部113がポリゴン描画処理を行って(S605)、一連の処理を終了する(S606)。
本実施形態の演算装置104の場合、定数は100を設定している。この定数は、市場に流通する一般的なパソコンの平均的な演算能力を鑑みて、迅速に計算処理を遂行することができる値として、発明者が設定した。したがって、演算装置104の演算能力、すなわちパソコンが有するCPUの演算能力と、演算装置104の用途次第で、この定数を適切に増減させることも可能であり、またそのようにすることが好ましい。
定数が100の場合、演算装置104は100×100×100=100万個の格子点データ112を作成することとなる。
本実施形態の演算装置104は、空洞を多数の直方体で分割して近似し、その直方体に含まれる格子点データ112の数を数え上げることで、体積を算出している。
処理を開始すると(S701)、現在処理対象となっている直方体配列変数のレコードにある直方体座標データを読み込み、当該直方体の表面上に存在する格子点が、全て計測データの外側にあるか否かを確認する(S702)。
計測データの中心点が存在すれば(S703のYES)、直方体領域を分割するサブルーチン「直方体分割処理」を実行して(S704)、処理を終了する(S705)。
直方体表面の格子点データ112の全てが計測データに含まれていれば(S707のYES)、直方体を構成する全ての格子点データ112が計測データによって定まる空洞の内側に存在すると判断できるので、現在処理対象としている直方体配列変数の分割不可フラグを論理の「真」に設定して(S708)、処理を終了する(S705)。
処理を開始すると(S801)、現在処理対象としている直方体は長すぎるか否か、確認する(S802)。本実施形態の演算装置104の場合、直方体を構成する辺のうち、最も短い辺が最も長い辺の2倍以上の長さの場合に、長すぎると判断している。
長すぎないと判断したら(S802のNO)、直方体を縦横高さで八分割する(S804)。
何れの分割処理の後でも、元々処理対象としていた直方体配列変数のレコードは削除して、分割して新たに作成した直方体データのレコードを直方体配列変数に追記して(S805)、処理を終了する(S806)。なお、上述の説明から明らかなように、ステップS805で新たに追記するレコードの分割不可フラグは、論理の「偽」である。
そして、それら八つの頂点が計測データに含まれていれば、当該直方体に属する格子点データ112の数を全て数え上げる。
それら八つの頂点のうちの一つでも計測データに含まれていなければ、当該直方体に属する格子点データ112のうち、どれが計測データに含まれているのかを一つずつ確認し、計測データに含まれている格子点データ112のみを数え上げる。
先ず、計測データファイルに記録されている全ての計測点座標データを、レーザプローブユニット105の位置を原点Oとして、この原点Oと原点Oに交わる任意の基準線からの極座標に変換する。図9では、原点Oに交わる基準線L901を基準として、第一計測点P902と第二計測点P903が存在する。
次に、判定対象となる格子点データも、同様に極座標に変換する。図9では格子点P904がこれに該当する。
次に、格子点データの角度に最も近く、且つ片方の角度は格子点データの角度以下であり、もう片方の角度は格子点データの角度より大きい二つの計測点データを抽出する。図9において、第一計測点P902の極座標が(θn,rn)、第二計測点P903の極座標が(θn+1,rn+1)、格子点P904の極座標が(θ,r)であるとき、各々の角度は以下の関係になる。

今、図10のような図形1001が計測データによって与えられたとする。体積算出部111は図6のステップS602で、この図形1001を丸ごと覆う、長方形の枠を作成する。この長方形1002が、前述の初期直方体データに相当する。
長方形1101は、長方形1201、1202、1205及び1206に分割される。
長方形1102は、長方形1203、1204、1207及び1208に分割される。
長方形1103は、長方形1209、1210、1213及び1214に分割される。
長方形1104は、長方形1211、1212、1215及び1216に分割される。
分割不可フラグが論理の真に設定されていない残りの長方形については、引き続き分割できるか否かを検証する処理が行われる。
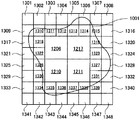
長方形1201は、長方形1301、1302、1309及び1310に分割される。
長方形1202は、長方形1303、1304、1311及び1312に分割される。
長方形1203は、長方形1305、1306、1313及び1314に分割される。
長方形1204は、長方形1307、1308、1315及び1316に分割される。
長方形1205は、長方形1317、1318、1321及び1322に分割される。
長方形1208は、長方形1319、1320、1323及び1324に分割される。
長方形1209は、長方形1325、1326、1329及び1330に分割される。
長方形1212は、長方形1327、1328、1331及び1332に分割される。
長方形1213は、長方形1333、1334、1341及び1342に分割される。
長方形1214は、長方形1335、1336、1343及び1344に分割される。
長方形1215は、長方形1337、1338、1345及び1346に分割される。
長方形1216は、長方形1339、1340、1347及び1348に分割される。
更に、図13の外周にある長方形1301、1302、1303、1304、1308、1316、1325、1329、1333、1340、1341、1342、1345、1346、1347及び1348は、その縦と横の辺の全てが図形の外部に属している(S702のYES)と共に、図形1001の中心点は存在しない(S703のNO)。つまり、当該長方形に属する格子点データ112は、図形1001に属しないので、これ以上分割する意味がない。このため、格子点データ112を計測する対象から外さなければならない。そこで、当該処理対象の長方形のデータを破棄する(S706)。
図14は、第一計測点P1402にレーザプローブ装置102を配置して得た第一の計測データファイルに基づく空洞を示す斜視図である。
今、空洞に対して第一計測点P1402にレーザプローブ装置102を配置し、第一の計測データファイルを得たとする。第一の計測データファイルに基づいて空洞を描画すると、図14のような空洞1401が形成される。図14において、実際の空洞はレーザプローブユニット105の視点から見て死角の位置に、更に深くえぐれた箇所である死角領域1403が存在するが、第一の計測データファイルには記録されない。
図14と同様に、空洞に対して第二計測点P1502にレーザプローブ装置102を配置し、第二の計測データファイルを得たとする。第二の計測データファイルに基づいて空洞を描画すると、図15のような空洞1501が形成される。図15において、実際の空洞はレーザプローブユニット105の視点から見て死角の位置に、更に深くえぐれた箇所である死角領域1503が存在するが、第二の計測データファイルには記録されない。
体積算出部111は、計測データファイル108が構成する空洞に属する格子点データ112を作成する。この時、複数の計測データファイル108が与えられれば、そのいずれかの計測データファイル108が構成する空洞に属する格子点データ112を算出する。この時、立体図形を重ねることによる重複を除去する処理は全く発生しないので、極めて容易に合成立体図形である空洞の本来の姿を再構成することができる。
(1)レーザプローブ装置102に備えられているステッピングモータは、DCモータ等に置換することができる。その際、移動量を把握するためのタコジェネレータ等のセンサが必要になる。
空洞をレーザプローブユニットとレーザ測距装置を用いて計測する際、レーザプローブユニットの初期位置決めを重力に基づいて行う、レーザプローブ装置を作成した。このレーザプローブ装置を用いることで、測定誤差が生じ難く、精度の高い空洞計測を実施することができる。
更に、複数の計測データファイルで合成されるべき空洞を、直方体の集まりで近似して格子点データを求めることで、空洞の正確な体積と三次元画像を容易に得ることができる。
Claims (4)
- 空洞に挿入され、前記空洞の内壁との距離を計測する空洞測距装置と、
前記空洞測距装置から得られる前記空洞の内壁との距離から前記空洞内壁の座標データを算出する座標演算部と、
前記座標データを格納する計測データファイルと、
前記計測データファイルにて定義される前記空洞を直方体の集まりで近似演算して、前記空洞に含まれる格子点データを作成する体積算出部と、
前記格子点データに基づいて前記空洞の立体画像を作成する立体画像構成部と
を具備する空洞計測装置。 - 前記体積算出部は、複数の前記計測データファイルによって定義される複数の立体を包含する初期直方体データを算出し、前記初期直方体データを所定の定数で等分することで前記格子点データを構成し、前記複数の立体のいずれかに含まれる前記格子点データを数え上げることで体積を算出する、請求項1記載の空洞計測装置。
- 前記体積算出部は、任意の前記格子点データと、前記計測データファイルから得られる、前記格子点データに角度が近接する二点の計測点とを、各々を極座標変換した後、前記格子点データが原点と前記二点の計測点とで形成される三角形に含まれるか否かを判定することで、前記格子点データが前記計測データファイルによって定義される前記空洞に含まれるか否かを判定する、請求項2記載の空洞計測装置。
- 脚部と、
前記脚部に回転可能に支持される基準円盤と、
前記基準円盤の半径方向に設けられる水準器と、
前記基準円盤の半径方向且つ前記水準器の直角方向に設けられる傾斜計と、
空洞に挿入され、前記空洞の内壁との距離を計測するためのレーザ光を発するレーザプローブユニットと、
前記基準円盤に支持され、前記レーザプローブユニットを前記基準円盤の前記傾斜計と平行な直径方向に支持するプローブ支持体と、
前記レーザプローブユニットを前記基準円盤と平行な平面上に回転駆動する円周駆動モータと、
前記レーザプローブユニットを前記基準円盤と垂直な平面上に駆動する仰俯角モータと
を具備するレーザプローブ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010188A JP2012150060A (ja) | 2011-01-20 | 2011-01-20 | 空洞計測装置及びレーザプローブ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010188A JP2012150060A (ja) | 2011-01-20 | 2011-01-20 | 空洞計測装置及びレーザプローブ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012150060A true JP2012150060A (ja) | 2012-08-09 |
Family
ID=46792426
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011010188A Pending JP2012150060A (ja) | 2011-01-20 | 2011-01-20 | 空洞計測装置及びレーザプローブ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012150060A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112734677A (zh) * | 2021-01-21 | 2021-04-30 | 飞燕航空遥感技术有限公司 | 一种机载LiDAR点云空洞内插方法和系统 |
| CN115079292A (zh) * | 2022-07-08 | 2022-09-20 | 山东大学 | 一种探查城市地下溶洞空间的探测装置及探测方法 |
| IT202300021366A1 (it) * | 2023-10-13 | 2025-04-13 | Green Line S R L | Metodo e apparato per la generazione di dati di riferimento volumetrici per la determinazione del contenuto di un serbatoio |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1130518A (ja) * | 1997-07-11 | 1999-02-02 | Mitsui Eng & Shipbuild Co Ltd | 空洞計測装置 |
| JP2001108592A (ja) * | 1999-10-12 | 2001-04-20 | Taisei Corp | 地盤の密度の測定方法 |
| JP2005292043A (ja) * | 2004-04-02 | 2005-10-20 | Asia Air Survey Co Ltd | 空洞内壁面形状計測装置 |
-
2011
- 2011-01-20 JP JP2011010188A patent/JP2012150060A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1130518A (ja) * | 1997-07-11 | 1999-02-02 | Mitsui Eng & Shipbuild Co Ltd | 空洞計測装置 |
| JP2001108592A (ja) * | 1999-10-12 | 2001-04-20 | Taisei Corp | 地盤の密度の測定方法 |
| JP2005292043A (ja) * | 2004-04-02 | 2005-10-20 | Asia Air Survey Co Ltd | 空洞内壁面形状計測装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112734677A (zh) * | 2021-01-21 | 2021-04-30 | 飞燕航空遥感技术有限公司 | 一种机载LiDAR点云空洞内插方法和系统 |
| CN112734677B (zh) * | 2021-01-21 | 2023-07-11 | 飞燕航空遥感技术有限公司 | 一种机载LiDAR点云空洞内插方法和系统 |
| CN115079292A (zh) * | 2022-07-08 | 2022-09-20 | 山东大学 | 一种探查城市地下溶洞空间的探测装置及探测方法 |
| IT202300021366A1 (it) * | 2023-10-13 | 2025-04-13 | Green Line S R L | Metodo e apparato per la generazione di dati di riferimento volumetrici per la determinazione del contenuto di un serbatoio |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102695518B1 (ko) | 차량 경로 가이드 방법 및 장치 | |
| Ferrero et al. | Advanced geostructural survey methods applied to rock mass characterization | |
| Blaer et al. | Data acquisition and view planning for 3-D modeling tasks | |
| Ma et al. | Real-time visualization method for estimating 3D highway sight distance using LiDAR data | |
| US9196086B2 (en) | Method, system, and computer-readable data storage device for creating and displaying three-dimensional features on an electronic map display | |
| JP7146271B2 (ja) | 埋設物計測装置、方法、及びプログラム | |
| CN104641254B (zh) | 使用射频信号的定位系统 | |
| US9989650B2 (en) | Position in urban canyons | |
| KR101756946B1 (ko) | 경도선/위도선을 기반으로 교통로를 구성하고, 지도 검색을 수행하는 방법 및 장치 | |
| US20130289937A1 (en) | Computing device and method of measuring surface dimensions of objects | |
| US11226937B2 (en) | Distributed measurement system for scanning projects | |
| US11536844B2 (en) | Dynamic sensor range detection for vehicle navigation | |
| KR20200010506A (ko) | 정적 물체의 로케이션을 결정하기 위한 방법 및 장치 | |
| Kaijaluoto | Precise indoor localization for mobile laser scanner | |
| JP2012150060A (ja) | 空洞計測装置及びレーザプローブ装置 | |
| KR102039863B1 (ko) | 지중포인트 클라우드 라이다 영상을 이용한 지하공동탐사 장치 | |
| CN110647600A (zh) | 三维地图的构建方法、装置、服务器及存储介质 | |
| JP7460660B2 (ja) | 航空写真を利用して三次元地図を生成する装置及びその方法 | |
| Rashidi et al. | Capturing geometry for labeling and mapping built infrastructure: an overview of technologies | |
| JP7828819B2 (ja) | 情報処理方法、情報処理装置、プログラム、及び計測システム | |
| Klapa et al. | Edge effect and its impact upon the accuracy of 2D and 3D modelling using laser scanning | |
| JP6185866B2 (ja) | 水中移動体の位置検知装置及び位置検知方法 | |
| Albert | Aspects of cave data use in a GIS | |
| CN115585802A (zh) | 地图创建方法、装置、电子设备及可读存储介质 | |
| YEO | Optical tracking control of a differentially-driven wheeled robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140107 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140729 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141125 |