JP2012150094A - アナログ電子時計 - Google Patents
アナログ電子時計 Download PDFInfo
- Publication number
- JP2012150094A JP2012150094A JP2011196344A JP2011196344A JP2012150094A JP 2012150094 A JP2012150094 A JP 2012150094A JP 2011196344 A JP2011196344 A JP 2011196344A JP 2011196344 A JP2011196344 A JP 2011196344A JP 2012150094 A JP2012150094 A JP 2012150094A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- analog electronic
- magnetic
- electronic timepiece
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000001514 detection method Methods 0.000 claims description 12
- 230000004907 flux Effects 0.000 claims description 11
- 239000000696 magnetic material Substances 0.000 claims description 9
- 239000000463 material Substances 0.000 claims description 9
- 230000035699 permeability Effects 0.000 claims description 5
- 238000010586 diagram Methods 0.000 description 13
- 238000005259 measurement Methods 0.000 description 11
- 229910000889 permalloy Inorganic materials 0.000 description 9
- 230000010355 oscillation Effects 0.000 description 8
- 230000004044 response Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 229920006395 saturated elastomer Polymers 0.000 description 4
- 239000013078 crystal Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000005426 magnetic field effect Effects 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/14—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor
- G04C3/146—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor incorporating two or more stepping motors or rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K37/00—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors
- H02K37/10—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type
- H02K37/12—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets
- H02K37/14—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets with magnets rotating within the armatures
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Electromechanical Clocks (AREA)
Abstract
【課題】特別な専用部材を使用することなく、簡単な構成で、モータに対する磁界の影響を低減する。
【解決手段】アナログ電子時計ムーブメントの地板301には、時刻針駆動用のステッピングモータ108、カレンダ駆動用のステッピングモータ109、クロノグラフ針駆動用のステッピングモータ110が収容され、ステッピングモータ110は電池押え303を介して電池缶302に接続されている。ステッピングモータ110を、電池缶302及び電池押え303を介して他のステッピングモータ108、109より多くの外部磁界が通るように配設することによって他のステッピングモータが受ける外部磁界の影響を低減すると共に、ステッピングモータ110の駆動力をステッピングモータ108、109よりも大きくすることにより外部磁界が存在してもステッピングモータ110の回転駆動を安定化させている。
【選択図】 図3
【解決手段】アナログ電子時計ムーブメントの地板301には、時刻針駆動用のステッピングモータ108、カレンダ駆動用のステッピングモータ109、クロノグラフ針駆動用のステッピングモータ110が収容され、ステッピングモータ110は電池押え303を介して電池缶302に接続されている。ステッピングモータ110を、電池缶302及び電池押え303を介して他のステッピングモータ108、109より多くの外部磁界が通るように配設することによって他のステッピングモータが受ける外部磁界の影響を低減すると共に、ステッピングモータ110の駆動力をステッピングモータ108、109よりも大きくすることにより外部磁界が存在してもステッピングモータ110の回転駆動を安定化させている。
【選択図】 図3
Description
本発明は、時刻針等の表示部材をモータによって回転駆動するアナログ電子時計に関し、特に、複数の表示部材を駆動する複数のモータを備えたアナログ電子時計に関する。
従来から、時刻針やカレンダ等の表示部材によって時刻や日付等を表示するアナログ電子時や、計測時間を表示部材であるクロノグラフ針によって表示するクロノグラフ時計等、時刻針、カレンダ、クロノグラフ針等の複数の表示部材を複数のモータによって回転駆動するようにしたアナログ電子時計が利用されている。
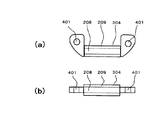
図7は、従来からアナログ電子時計に使用されているステッピングモータのコイルブロック304を示す図で、同図(a)は平面図、同図(b)は正面図である。図7において、コイルブロック304は、磁心208及び磁心208に巻回されたモータ駆動用のコイル209を備えている。コイルブロック304は、コイルブロック304と磁気回路を構成するステータとともに、ねじ孔401を介してアナログ電子時計ムーブメントの地板にねじ止めして使用される。
図7は、従来からアナログ電子時計に使用されているステッピングモータのコイルブロック304を示す図で、同図(a)は平面図、同図(b)は正面図である。図7において、コイルブロック304は、磁心208及び磁心208に巻回されたモータ駆動用のコイル209を備えている。コイルブロック304は、コイルブロック304と磁気回路を構成するステータとともに、ねじ孔401を介してアナログ電子時計ムーブメントの地板にねじ止めして使用される。
特許文献1には、前述したステッピングモータや発電機など複数の転換機を備えたアナログ電子時計において、磁界の影響を受けても機能できるようにした発明が記載されている。
特許文献1記載の発明では、2つの磁気回路相互の影響を低減するために、2つのコイルをほぼ直角に配置している。
磁界の影響を受け難くする方法としては、コイル磁心の断面積を大きくして磁気飽和の余裕度を大きくする方法や、磁界が存在する場合に、無磁界時の駆動パルスよりもエネルギの大きい駆動パルス(例えば補正駆動パルス)によって駆動する方法等が一般的である。
特許文献1記載の発明では、2つの磁気回路相互の影響を低減するために、2つのコイルをほぼ直角に配置している。
磁界の影響を受け難くする方法としては、コイル磁心の断面積を大きくして磁気飽和の余裕度を大きくする方法や、磁界が存在する場合に、無磁界時の駆動パルスよりもエネルギの大きい駆動パルス(例えば補正駆動パルス)によって駆動する方法等が一般的である。
しかしながら、アナログ電子時計が2個以上のコイルを有する場合、アナログ電子時計のムーブメント内で各磁気回路を直角に配設することは、レイアウト上の制約が大きいという問題がある。
また、全てのステッピングモータのコイル磁心断面積を大きくする方法も考えられるが、モータ容積が増大するという問題がある。
また、各モータを磁性材料によって遮蔽して磁気シールドすることも考えられるが、アナログ電子時計の限られたスペース内に磁気シールド専用部材を配設すると、小型化が困難になるという問題がある。
また、全てのステッピングモータのコイル磁心断面積を大きくする方法も考えられるが、モータ容積が増大するという問題がある。
また、各モータを磁性材料によって遮蔽して磁気シールドすることも考えられるが、アナログ電子時計の限られたスペース内に磁気シールド専用部材を配設すると、小型化が困難になるという問題がある。
本発明は、前記問題点に鑑み成されたもので、特別な専用部材を使用することなく、簡単な構成で、モータに対する磁界の影響を低減することを課題としている。
本発明によれば、複数の表示部材を回転駆動する複数のモータをムーブメントに搭載して成るアナログ電子時計において、前記複数のモータ以外に外部磁界が通る磁性部材を有し、特定のモータは、前記磁性部材を介して他のモータより多くの外部磁界が通るように配設されると共に、前記他のモータよりも駆動力を強くされて成ることを特徴とするアナログ電子時計が提供される。
本発明に係るアナログ電子時計によれば、特別な専用部材を使用することなく、簡単な構成で、モータに対する磁界の影響を低減することが可能になる。
以下、本発明の実施の形態に係るアナログ電子時計について説明する。尚、各図において、同一部分には同一符号を付している。また、図1では、時間計測の開始や停止などを指示する操作部を省略して描いている。
図1は、本発明の実施の形態に係るアナログ電子時計のブロック図で、クロノグラフ時計の例を示しており、後述する各実施の形態に共通するブロック図である。
図1において、アナログ電子時計は、ステッピングモータ制御回路102によって回転駆動される複数(本実施の形態では3つ)のステッピングモータ108、109、110、ステッピングモータ制御回路102やステッピングモータ108〜110等の回路要素に駆動電力を供給する電源としての電池101を備えている。
図1は、本発明の実施の形態に係るアナログ電子時計のブロック図で、クロノグラフ時計の例を示しており、後述する各実施の形態に共通するブロック図である。
図1において、アナログ電子時計は、ステッピングモータ制御回路102によって回転駆動される複数(本実施の形態では3つ)のステッピングモータ108、109、110、ステッピングモータ制御回路102やステッピングモータ108〜110等の回路要素に駆動電力を供給する電源としての電池101を備えている。
ステッピングモータ108は、時刻表示用の時刻針(図示せず)を回転駆動するステッピングモータである。ステッピングモータ109は、カレンダ機構(図示せず)を回転駆動するステッピングモータである。また、ステッピングモータ110は、計測時間表示用のクロノグラフ針(図示せず)を回転駆動するステッピングモータである。
ステッピングモータ制御回路102は、所定周波数の信号を発生する発振回路103、発振回路103で発生した信号を分周して計時の基準となる時計信号を発生する分周回路104、電子時計を構成する各電子回路要素の制御や駆動パルスの変更制御等の制御を行う制御回路105、制御回路105からの制御信号に基づいてステッピングモータ108〜110にモータ回転駆動用の駆動パルスを選択し出力するステッピングモータ駆動パルス回路106、外部磁界を検出する磁界検出回路107を備えている。
ステッピングモータ制御回路102は1つの集積回路(IC)及び発振回路103を構成する水晶振動子(図示せず)によって構成されている。
ここで、発振回路103及び分周回路104は信号発生手段を構成している。また、制御回路105は制御手段を構成し、磁界検出回路107は磁界検出手段を構成している。
ステッピングモータ制御回路102は、所定周波数の信号を発生する発振回路103、発振回路103で発生した信号を分周して計時の基準となる時計信号を発生する分周回路104、電子時計を構成する各電子回路要素の制御や駆動パルスの変更制御等の制御を行う制御回路105、制御回路105からの制御信号に基づいてステッピングモータ108〜110にモータ回転駆動用の駆動パルスを選択し出力するステッピングモータ駆動パルス回路106、外部磁界を検出する磁界検出回路107を備えている。
ステッピングモータ制御回路102は1つの集積回路(IC)及び発振回路103を構成する水晶振動子(図示せず)によって構成されている。
ここで、発振回路103及び分周回路104は信号発生手段を構成している。また、制御回路105は制御手段を構成し、磁界検出回路107は磁界検出手段を構成している。
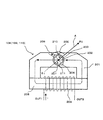
図2は、本発明の実施の形態に使用するステッピングモータの原理的な構成を示す基本構成図で、ステッピングモータ108〜110に共通する基本構成図である。図2には、アナログ電子時計で一般に用いられている2極PM型ステッピングモータの例を示している。
図2において、ステッピングモータ108(以下、ステッピング108を代表的に記載するが、基本構成は他のステッピングモータ109、110も同じである。)は、ロータ収容用貫通孔203を有するステータ201、ロータ収容用貫通孔203に回転可能に配設されたロータ202、ステータ201と接合された磁心208、磁心208に巻回されたステッピングモータ駆動用のコイル209を備えている。ステッピングモータ108をアナログ電子時計に用いる場合には、ステータ201及び磁心208はネジ等(図示せず)によって地板(図示せず)に固定され、互いに接合される。コイル209は、第1端子OUT1、第2端子OUT2を有している。
図2において、ステッピングモータ108(以下、ステッピング108を代表的に記載するが、基本構成は他のステッピングモータ109、110も同じである。)は、ロータ収容用貫通孔203を有するステータ201、ロータ収容用貫通孔203に回転可能に配設されたロータ202、ステータ201と接合された磁心208、磁心208に巻回されたステッピングモータ駆動用のコイル209を備えている。ステッピングモータ108をアナログ電子時計に用いる場合には、ステータ201及び磁心208はネジ等(図示せず)によって地板(図示せず)に固定され、互いに接合される。コイル209は、第1端子OUT1、第2端子OUT2を有している。
ロータ202は、2極(S極及びN極)に着磁されている。磁性材料によって形成されたステータ201の外端部には、ロータ収容用貫通孔203を挟んで対向する位置に複数(本実施の形態では2個)の切り欠き部(外ノッチ)206、207が設けられている。各外ノッチ206、207とロータ収容用貫通孔203間には可飽和部210、211が設けられている。
可飽和部210、211は、ロータ202の磁束によっては磁気飽和せず、コイル209が励磁されたときに磁気飽和して磁気抵抗が大きくなるように構成されている。ロータ収容用貫通孔203は、輪郭が円形の貫通孔の対向部分に複数(本実施の形態では2つ)の半月状の切り欠き部(内ノッチ)204、205を一体形成した円孔形状に構成されている。
切り欠き部204、205は、ロータ202の停止位置を決めるための位置決め部を構成している。コイル209が励磁されていない状態では、ロータ202は、図2に示すように前記位置決め部に対応する位置、換言すれば、ロータ202の磁極軸Aが、切り欠き部204、205を結ぶ線分と直交するような位置(角度θ0位置)に安定して停止している。
いま、ステッピングモータ駆動パルス回路106から矩形波の第1極性(例えば、第1端子OUT1側を正極、第2端子OUT2側を負極)の駆動パルスをコイル209の端子OUT1、OUT2間に供給して、図2の矢印方向に電流iを流すと、磁心208及びステータ201には破線矢印方向に磁束が発生する。これにより、可飽和部210、211が飽和して磁気抵抗が大きくなり、その後、ステータ201に生じた磁極とロータ202の磁極との相互作用によって、ロータ202は図2の矢印方向に180度回転し、磁極軸が角度θ1位置で安定的に停止する。尚、ステッピングモータ108を回転駆動することによって通常動作(本実施の形態ではアナログ電子時計であるため運針動作やカレンダ送り動作)を行わせるための回転方向(図2では反時計回り方向)を正方向とし、その逆(時計回り方向)を逆方向としている。
次に、ステッピングモータ駆動パルス回路106から、前記第1極性とは異なる第2極性(前記駆動とは逆極性となるように、第1端子OUT1側を負極、第2端子OUT2側を正極)の矩形波の駆動パルスをコイル209の端子OUT1、OUT2に供給して、図2の反矢印i方向に電流を流すと、ステータ201には反破線矢印方向に磁束が発生する。これにより、可飽和部210、211が先ず飽和し、その後、ステータ201に生じた磁極とロータ202の磁極との相互作用によって、ロータ202は前記と同一方向(正方向)に180度回転し、磁極軸Aが角度θ0位置で安定的に停止する。
以後、このように、コイル209に対して極性の異なる駆動信号(交番信号)を供給することによって、前記動作が繰り返し行われて、ロータ202を180度ずつ矢印方向に連続的に回転させることができるように構成されている。
尚、本実施の形態では、駆動パルスとして、後述するように、相互に駆動エネルギの異なる複数の駆動パルスを用いており、所定強度以上の外部磁界が存在する場合には、特定のモータであるステッピングモータ110を、他のモータであるステッピングモータ108、109よりもエネルギの大きい所定駆動パルスを用いて駆動するように構成している。また、ステッピングモータ110を、外部磁界が存在しない場合よりもエネルギの大きい所定駆動パルスを用いて駆動するように構成している。このようにして、駆動の面からも、特定のステッピングモータ110の駆動力が他のステッピングモータ108、109よりも大きくなるように構成している。
尚、本実施の形態では、駆動パルスとして、後述するように、相互に駆動エネルギの異なる複数の駆動パルスを用いており、所定強度以上の外部磁界が存在する場合には、特定のモータであるステッピングモータ110を、他のモータであるステッピングモータ108、109よりもエネルギの大きい所定駆動パルスを用いて駆動するように構成している。また、ステッピングモータ110を、外部磁界が存在しない場合よりもエネルギの大きい所定駆動パルスを用いて駆動するように構成している。このようにして、駆動の面からも、特定のステッピングモータ110の駆動力が他のステッピングモータ108、109よりも大きくなるように構成している。
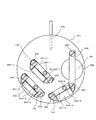
図3は、本発明の第1の実施の形態に係るアナログ電子時計の内部を示す平面図である。
図3において、301はアナログ電子時計ムーブメントの地板、302は電池101の電池缶、303は電池押え、305は巻真である。電池押え303は、ねじ306によって地板301に固定されており、電池101は電池押え303によって地板301から脱落しないように固定されている。
電池缶302及び電池押え303は磁性材料(例えば鉄系又はステンレス系の磁性材料)によって構成されており、各々、磁性体部材を構成している。
図3において、301はアナログ電子時計ムーブメントの地板、302は電池101の電池缶、303は電池押え、305は巻真である。電池押え303は、ねじ306によって地板301に固定されており、電池101は電池押え303によって地板301から脱落しないように固定されている。
電池缶302及び電池押え303は磁性材料(例えば鉄系又はステンレス系の磁性材料)によって構成されており、各々、磁性体部材を構成している。
時刻針駆動用のステッピングモータ108はコイルブロック304−1、ロータ収容用貫通孔203−1を有するステータ201−1、ロータ収容用貫通孔203−1内に回転可能に配設されたロータ202−1を有している。カレンダ駆動用のステッピングモータ109はコイルブロック304−2、ロータ収容用貫通孔203−2を有するステータ201−2、ロータ収容用貫通孔203−2内に回転可能に配設されたロータ202−2を有している。クロノグラフ針駆動用のステッピングモータ110はコイルブロック304−3、ロータ収容用貫通孔203−3を有するステータ201−3、ロータ収容用貫通孔203−3内に回転可能に配設されたロータ202−3を有している。各ステッピングモータ108〜109は、ねじ306によって地板301内に固定されている。
特定のモータであるステッピングモータ110は、電池押え303を介して電池缶302に接続されている。また、ステッピングモータ110は、他のモータ(前記特定のモータ以外のモータ)であるステッピングモータ108、109よりも電池缶302に近い位置に配設されている。
前記特定のモータとしては、時刻針駆動用等のような常時回転動作をしているモータ以外のモータ(本実施の形態ではカレンダ駆動用ステッピングモータ109、クロノグラフ針駆動用ステッピングモータ110)が選択できる。また、前記他のモータとして選択されるモータには、少なくとも常時回転動作を行うモータ(本実施の形態では時刻針駆動用ステッピングモータ108)が含まれる。
前記特定のモータとしては、時刻針駆動用等のような常時回転動作をしているモータ以外のモータ(本実施の形態ではカレンダ駆動用ステッピングモータ109、クロノグラフ針駆動用ステッピングモータ110)が選択できる。また、前記他のモータとして選択されるモータには、少なくとも常時回転動作を行うモータ(本実施の形態では時刻針駆動用ステッピングモータ108)が含まれる。
係る構成により、外部磁界は、磁性材料によって形成されるとともに大きな面積を示す電池缶302に集まりやすくなり、電池缶302を通った外部磁束は電池押え303を介してステッピングモータ110に流れる。これにより、前記他のステッピングモータ108、109に流れる外部磁束を小さくすることができ、外部磁界が前記他のステッピングモータ108、109に与える影響を小さくすることができる。
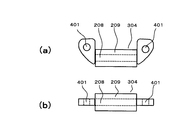
図4は、ステッピングモータ110の部分構成図で、ステッピングモータ110のコイルブロック304−3を示している。図4において、ステッピングモータ110の磁心208の断面積Sを他のステッピングモータ108、109の断面積Sよりも大きくすることにより、磁心208の磁気抵抗が小さくなるように構成し、ステッピングモータ110の駆動力を大きくしている。また、磁心208の断面積Sを大きくすることによって飽和磁束のレベルを大きくすることにより、大きな駆動磁束を通せるようにして、磁界中の駆動力を大きくしている。
他のステッピングモータ108、109の磁心208は図7と同じであり、ステッピングモータ110の磁心208よりも断面積が小さく形成されている。
このようにして、モータの構造的な面からも、特定のステッピングモータ110の駆動力が他のステッピングモータ108、109よりも大きくなるように構成している。
他のステッピングモータ108、109の磁心208は図7と同じであり、ステッピングモータ110の磁心208よりも断面積が小さく形成されている。
このようにして、モータの構造的な面からも、特定のステッピングモータ110の駆動力が他のステッピングモータ108、109よりも大きくなるように構成している。
計時して時刻表示を行う場合、発振回路103は所定周波数の基準クロック信号を発生し、分周回路104が発振回路103で発生した前記信号を分周して計時の基準となる時計信号を制御回路105に出力する。
制御回路105は、前記時計信号を計数して計時動作を行い、所定タイミング毎に時刻針(時紛秒針)を駆動するようにステッピングモータ駆動パルス回路106に制御信号を出力する。ステッピングモータ駆動パルス回路106は、前記制御信号に応答して時刻針駆動用のステッピングモータ108を常時回転駆動する。ステッピングモータ108は図示しない時刻針を回転駆動し、前記時刻針によって常時、現在時刻が表示される。
制御回路105は、前記時計信号を計数して計時動作を行い、所定タイミング毎に時刻針(時紛秒針)を駆動するようにステッピングモータ駆動パルス回路106に制御信号を出力する。ステッピングモータ駆動パルス回路106は、前記制御信号に応答して時刻針駆動用のステッピングモータ108を常時回転駆動する。ステッピングモータ108は図示しない時刻針を回転駆動し、前記時刻針によって常時、現在時刻が表示される。
制御回路105は、日にちの表示変更が必要な時刻が到来したと判断すると、カレンダ機構(図示せず)を回転駆動するようにステッピングモータ109に制御信号を出力する。ステッピングモータ109は、前記制御信号に応答してカレンダ機構を一定時間のみ回転駆動して日にち表示を翌日に変更する。
制御回路105は、操作部(図示せず)によって時間計測開始操作が行われたと判断すると、時間計測動作を開始し、計測時間を表示するように所定タイミング毎にステッピングモータ駆動パルス回路106に制御信号を出力する。ステッピングモータ駆動パルス回路106は、前記制御信号に応答してステッピングモータ110を回転駆動する。これにより、ステッピングモータ110はクロノグラフ針を回転駆動して計測している時間を表示させる。
制御回路105は、操作部(図示せず)によって時間計測開始操作が行われたと判断すると、時間計測動作を開始し、計測時間を表示するように所定タイミング毎にステッピングモータ駆動パルス回路106に制御信号を出力する。ステッピングモータ駆動パルス回路106は、前記制御信号に応答してステッピングモータ110を回転駆動する。これにより、ステッピングモータ110はクロノグラフ針を回転駆動して計測している時間を表示させる。
制御回路105は、操作部(図示せず)によって時間計測停止操作が行われたと判断すると、時間計測動作を停止し、ステッピングモータ110の駆動を停止するようにステッピングモータ駆動パルス回路106に制御信号を出力する。ステッピングモータ駆動パルス回路106は、前記制御信号に応答してステッピングモータ110の回転駆動を停止する。これにより、ステッピングモータ110は時間計測を行っている時間のみクロノグラフ針を回転駆動し、クロノグラフ針は計測した時間を表す位置で停止する。
一方、時間計測動作中に、磁界検出回路107はアナログ電子時計外部の磁界を検出しており、制御回路105は、磁界検出回路107が所定強度以上の外部磁界を検出したと判断すると、ステッピングモータ駆動パルス回路106に対して、所定強度以上の外部磁界を検出していないときの主駆動パルスよりも駆動エネルギの大きい所定駆動パルス(例えば主駆動パルスよりも駆動エネルギが大きい補正駆動パルス)に切り換えてステッピングモータ110を駆動するように制御信号を出力する。
ステッピングモータ駆動パルス回路106は、前記制御信号に応答して、所定駆動パルスによってステッピングモータ110を回転駆動する。これにより、所定強度以上の外部磁界が生じた場合でも、ステッピングモータ110の駆動力を大きくして、確実に回転駆動させることができる。この場合、大きなエネルギの駆動パルスで駆動するモータは、時刻針駆動用のステッピングモータ108のような常時駆動するモータではなく、計測時間やカレンダ機構駆動時間等の短時間駆動するモータであるため、消費電力の増大を小さく抑えることが可能になる。
尚、磁気検出回路107が所定強度以上の外部磁界を検出したときにのみ駆動パルスのエネルギを大きくするため、消費電力の増加を小さく抑えることが可能である。しかしながら、必ずしも磁気検出回路107を設ける必要はなく、ステッピングモータ110を回転駆動するとき常に大きなエネルギの駆動パルスで駆動するように構成してもよい。これにより、構成を簡略することが可能になる。
また、ステッピングモータ110の駆動力を大きくするために、駆動エネルギを大きくする構成および磁心208の磁気抵抗を小さくする構成を用いたが少なくともいずれか一方を用いるように構成してもよい。
また、電池缶302、電池押え303及び特定のモータ110を直接接続したが、空間を空けて間接的に接続するように構成してもよい。
また、ステッピングモータ110の駆動力を大きくするために、駆動エネルギを大きくする構成および磁心208の磁気抵抗を小さくする構成を用いたが少なくともいずれか一方を用いるように構成してもよい。
また、電池缶302、電池押え303及び特定のモータ110を直接接続したが、空間を空けて間接的に接続するように構成してもよい。
以上述べたように本発明の第1の実施の形態に係るアナログ電子時計は、ムーブメントの地板301に、複数のモータ(時刻針駆動用のステッピングモータ108、カレンダ駆動用のステッピングモータ109、クロノグラフ針駆動用のステッピングモータ110)が搭載され、ステッピングモータ110は電池押え303を介して電池缶302に接続されている。ステッピングモータ110を、電池缶302及び電池押え303を介して他のステッピングモータ108、109よりも多くの外部磁界が通るように配設することによって他のステッピングモータ108、109が受ける外部磁界の影響を低減すると共に、ステッピングモータ110の駆動力をステッピングモータ108、109よりも大きくすることにより外部磁界が存在してもステッピングモータ110の回転駆動を安定させている。
即ち、本実施の形態に係るアナログ電子時計は、複数の表示部材を回転駆動する複数のモータ108〜110をムーブメントの地板301に搭載して成るアナログ電子時計において、前記複数のモータ108〜110以外に外部磁界が通る磁性部材(例えば電池缶302、電池押え303)を有し、特定のモータ110は、前記磁性部材を介して他のモータ108、109より多くの外部磁界が通るように配設されると共に、前記他のモータ108、109よりも駆動力が強いことを特徴としている。
ここで、前記特定のモータ110の駆動エネルギを他のモータ108、109よりも大きくして成るように構成することができる。
また、磁界を検出する磁界検出回路107と、磁界検出回路107が所定強度以上の磁界を検出したとき、前記特定のモータ110の駆動エネルギが他のモータ108、109よりも大きくなるように制御する制御手段とを備えるように構成してもよい。
また、磁界を検出する磁界検出回路107と、磁界検出回路107が所定強度以上の磁界を検出したとき、前記特定のモータ110の駆動エネルギが他のモータ108、109よりも大きくなるように制御する制御手段とを備えるように構成してもよい。
また、前記各モータ108〜110は、磁心208と、磁心208に巻回されたコイル209と、コイル209に電流を供給することによって生じる磁界に基づいて回転するロータ202とを有して成り、前記特定のモータ110は前記他のモータ108、109よりも磁心208の磁気抵抗を小さくすることによって駆動力が大きくなるように構成してもよい。このとき前記特定のモータ110は、他のモータ108、109よりも磁心208の断面積Sを大きくすることによって磁気抵抗が小さくなるように構成してもよい。
したがって、本発明に係るアナログ電子時計によれば、特別な専用部材を使用することなく、簡単な構成で、モータに対する外部磁界の影響を低減することが可能になる。
また、複数モータを有するアナログ電子時計において、各モータに万全の磁界対策を施すのではなく特定のモータの駆動力を強化し、電池缶302等の磁気を受けやすい部材と前記特定のモータとを他のモータよりも磁気回路的により近接させ、前記他のモータに磁界の影響がおよび難くする磁気シールドをすることができる。
また、複数のモータを備えるアナログ電子時計において、サイズの大型化を抑え、外部磁界中での安定且つ確実な運針が可能となる等の効果を奏する。
また、複数モータを有するアナログ電子時計において、各モータに万全の磁界対策を施すのではなく特定のモータの駆動力を強化し、電池缶302等の磁気を受けやすい部材と前記特定のモータとを他のモータよりも磁気回路的により近接させ、前記他のモータに磁界の影響がおよび難くする磁気シールドをすることができる。
また、複数のモータを備えるアナログ電子時計において、サイズの大型化を抑え、外部磁界中での安定且つ確実な運針が可能となる等の効果を奏する。
図5は、本発明の第2の実施の形態に使用する特定のステッピングモータ110の部分構成図である。前記第1の実施の形態では磁心208の磁気抵抗を小さくするために断面積Sを大きくしたが、本第2の実施の形態では磁心208の長さLを、他のステッピングモータ108、109の磁心208よりも短く構成している。その他の構成は前記第1の実施の形態と同じである。これによっても前記第1の実施の形態と同様の効果を奏することが可能になる。
図6は、本発明の第3の実施の形態に係るアナログ電子時計の内部を示す平面図である。
図6において、アナログ電子時計ムーブメントの地板301内には、電池101、時刻針駆動用のステッピングモータ108、カレンダ駆動用のステッピングモータ109、クロノグラフ針駆動用のステッピングモータ110の他に、アナログ電子時計の回路要素を搭載した絶縁性の回路基板602、回路基板602が地板301から脱落しないように取り付ける回路押え601を有している。回路押え601は、電池缶302と同様の磁性材料によって構成されており、磁性体部材を構成している。
図6において、アナログ電子時計ムーブメントの地板301内には、電池101、時刻針駆動用のステッピングモータ108、カレンダ駆動用のステッピングモータ109、クロノグラフ針駆動用のステッピングモータ110の他に、アナログ電子時計の回路要素を搭載した絶縁性の回路基板602、回路基板602が地板301から脱落しないように取り付ける回路押え601を有している。回路押え601は、電池缶302と同様の磁性材料によって構成されており、磁性体部材を構成している。
回路基板602には、ステッピングモータ制御回路102を構成する集積回路603及び発振回路103を構成する水晶振動子604が搭載され、配線パターン605によってステッピングモータ108〜110と電気的に接続されている。
回路押え601、回路基板602は、ステッピングモータ108〜110と同様に、ねじ306によって地板301に固定されている。
特定のモータであるステッピングモータ110は、回路押え601に接続されている。また、ステッピングモータ110は、他のモータであるステッピングモータ108、109よりも電池缶302や回路押え601に近い位置に配設されている。
回路押え601、回路基板602は、ステッピングモータ108〜110と同様に、ねじ306によって地板301に固定されている。
特定のモータであるステッピングモータ110は、回路押え601に接続されている。また、ステッピングモータ110は、他のモータであるステッピングモータ108、109よりも電池缶302や回路押え601に近い位置に配設されている。
ステッピングモータ110は、前述した各実施の形態と同様に、他のステッピングモータ108、109よりも、エネルギの大きい駆動パルスによって駆動する、磁心208の磁気抵抗を小さくする等によって駆動力を大きくしている。
これにより、本第3の実施の形態によれば、前記各実施の形態と同様に、特別な専用部材を使用することなく、簡単な構成で、モータに対する外部磁界の影響を低減することが可能になる。
これにより、本第3の実施の形態によれば、前記各実施の形態と同様に、特別な専用部材を使用することなく、簡単な構成で、モータに対する外部磁界の影響を低減することが可能になる。
図8は、本発明の第4の実施の形態に係るアナログ電子時計に使用するステッピングモータの部分構成図である。
本第4の実施の形態では、特定のモータであるステッピングモータ110は、他のモータであるステッピングモータ108、109よりも駆動用のコイル209の巻数が多く構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されている。前記他のモータのコイル209は巻数が少ないため磁心208にコイル209を巻回した部分は図7に示すように細いが、前記特定のモータの磁心208にコイル209を巻回した部分は前記他のモータに比べて巻数が多いため、図8に示すように前記他のモータのそれに比べて太くなっている。
本第4の実施の形態では、特定のモータであるステッピングモータ110は、他のモータであるステッピングモータ108、109よりも駆動用のコイル209の巻数が多く構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されている。前記他のモータのコイル209は巻数が少ないため磁心208にコイル209を巻回した部分は図7に示すように細いが、前記特定のモータの磁心208にコイル209を巻回した部分は前記他のモータに比べて巻数が多いため、図8に示すように前記他のモータのそれに比べて太くなっている。
このように、各モータ108〜110は、磁心208と、磁心208に巻回されたコイル209と、コイル209に電流を供給することによって生じる磁界に基づいて回転するロータ202とを有する構成であり、前記特定のモータであるステッピングモータ110は、前記他のモータであるステッピングモータ108、109よりもコイル209の巻数が多く構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されている。
これにより、本第4の実施の形態に係るアナログ電子時計は、特別な専用部材を使用することなく、簡単な構成で、モータに対する磁界の影響を低減することが可能になる等の効果を奏する。
これにより、本第4の実施の形態に係るアナログ電子時計は、特別な専用部材を使用することなく、簡単な構成で、モータに対する磁界の影響を低減することが可能になる等の効果を奏する。
図10〜図12、図14、図15に示す実施の形態は、各モータ108〜110は、磁心208と、磁心208に巻回された駆動用のコイル209と、円柱型のロータ磁石を有しコイル209に電流を供給することによって生じる磁界に基づいて回転するロータ202とを備え、特定のモータであるステッピングモータ110は、他のモータであるステッピングモータ108、109よりもコギングトルクが小さく構成されることによって、前記他のモータよりも駆動力が大きくなるように構成した例である。
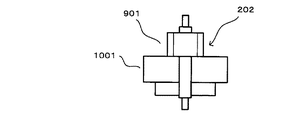
図10〜図12に示す実施の形態では、前記特定のモータは、前記他のモータよりもロータ202のロータ磁石の体積が小さく構成されることによって、前記他のモータよりもコギングトルクが小さくなるように構成されている。具体的には、前記特定のモータは、前記他のモータよりもロータ磁石の外径を小さくする、内径を大きくするまたは厚みを薄くするの少なくとも一つを実施することによってロータ磁石の体積が小さくなるように構成されている。
図10は、本発明の第5の実施の形態に係るアナログ電子時計に使用するステッピングモータのロータを示す側面図である。
図9に示す従来のステッピングモータのロータ202のように、前記他のモータであるステッピングモータ108、109のロータ202は、回転軸901及び回転軸901に取り付けられた円柱型のロータ磁石902を有するように構成されている。
図9に示す従来のステッピングモータのロータ202のように、前記他のモータであるステッピングモータ108、109のロータ202は、回転軸901及び回転軸901に取り付けられた円柱型のロータ磁石902を有するように構成されている。
図10に示す第5の形態では、特定のモータであるステッピングモータ110のロータ202は、図9のロータ202に比べて厚みの薄い円柱型のロータ磁石1001を回転軸901に取り付けた構成となっている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
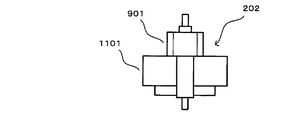
図11は、本発明の第6の実施の形態に係るアナログ電子時計に使用するステッピングモータのロータを示す側面図である。
図11に示す第6の形態では、特定のモータであるステッピングモータ110のロータ202は、図9のロータ202に比べて、内径(回転軸901が通過する孔の径)の大きい円柱型のロータ磁石1101を回転軸901に取り付けた構成となっている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
図11に示す第6の形態では、特定のモータであるステッピングモータ110のロータ202は、図9のロータ202に比べて、内径(回転軸901が通過する孔の径)の大きい円柱型のロータ磁石1101を回転軸901に取り付けた構成となっている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
図12は、本発明の第7の実施の形態に係るアナログ電子時計に使用するステッピングモータのロータを示す側面図である。
図12に示す第7の形態では、特定のモータであるステッピングモータ110のロータ202は、図9のロータ202に比べて外径の小さい円柱型のロータ磁石1201を回転軸901に取り付けた構成となっている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
尚、前記特定のモータは、前記他のモータよりもロータ磁石の磁石エネルギ(着磁力)が小さい材料で構成されることによって、前記他のモータよりもコギングトルクが小さくなるように構成するようにしてもよい。
図12に示す第7の形態では、特定のモータであるステッピングモータ110のロータ202は、図9のロータ202に比べて外径の小さい円柱型のロータ磁石1201を回転軸901に取り付けた構成となっている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
尚、前記特定のモータは、前記他のモータよりもロータ磁石の磁石エネルギ(着磁力)が小さい材料で構成されることによって、前記他のモータよりもコギングトルクが小さくなるように構成するようにしてもよい。
図14、図15に示す実施の形態では、ステータ201の形状を変えることにより、特定のモータは他のモータよりもコギングトルクが小さくなるように構成されている。
図14は、本発明の第8の実施の形態に係るアナログ電子時計に使用するステッピングモータのステータ201を示す部分平面図である。
図13に示す従来のステッピングモータのステータ201のように、前記他のモータであるステッピングモータ108、109のステータ201は、磁心208に接続され又、ロータ202を回転可能に収容するロータ収容用貫通孔203及びロータ202を所定位置に保持するための内ノッチ204、205を有している。
図14は、本発明の第8の実施の形態に係るアナログ電子時計に使用するステッピングモータのステータ201を示す部分平面図である。
図13に示す従来のステッピングモータのステータ201のように、前記他のモータであるステッピングモータ108、109のステータ201は、磁心208に接続され又、ロータ202を回転可能に収容するロータ収容用貫通孔203及びロータ202を所定位置に保持するための内ノッチ204、205を有している。
図14に示す第8の形態では、特定のモータであるステッピングモータ110の内ノッチ1401、1402は、前記他のモータであるステッピングモータ108、109の内ノッチ(図13の内ノッチ204、205)に比べて小さく形成されている。これにより、特定のモータを他のモータよりもコギングトルクが小さくなるように構成している。
図15は、本発明の第9の実施の形態に係るアナログ電子時計に使用するステッピングモータのステータ201を示す部分平面図である。
図15に示す第9の形態では、特定のモータであるステッピングモータ110のロータ収容用貫通孔1501は、図13のロータ収容用貫通孔203に比べて大きく形成されている。これにより、特定のモータは他のモータよりもコギングトルクが小さくなるように構成されている。
図15に示す第9の形態では、特定のモータであるステッピングモータ110のロータ収容用貫通孔1501は、図13のロータ収容用貫通孔203に比べて大きく形成されている。これにより、特定のモータは他のモータよりもコギングトルクが小さくなるように構成されている。
更に他の実施の形態として、前記特定のモータは、前記他のモータよりも磁心208が磁気的に効率の良い材料で構成されることによって、前記他のモータよりも駆動力が大きくなるように構成してもよい。
例えば、前記特定のモータの磁心208は45%パーマロイによって構成し、前記他のモータの磁心は38%パーマロイあるいは42%パーマロイによって構成する。45%パーマロイは、38%パーマロイや42%パーマロイに比べて、飽和磁束密度が大きい材料であり又、透磁率が大きい材料である。したがって、前記特定モータの磁心208を、飽和磁束密度が大きい材料又は透磁率が大きい材料の少なくとも一方で構成することにより、特定モータの駆動力を他のモータよりも強くすることができる。
例えば、前記特定のモータの磁心208は45%パーマロイによって構成し、前記他のモータの磁心は38%パーマロイあるいは42%パーマロイによって構成する。45%パーマロイは、38%パーマロイや42%パーマロイに比べて、飽和磁束密度が大きい材料であり又、透磁率が大きい材料である。したがって、前記特定モータの磁心208を、飽和磁束密度が大きい材料又は透磁率が大きい材料の少なくとも一方で構成することにより、特定モータの駆動力を他のモータよりも強くすることができる。
特定モータ磁心208を45%パーマロイで構成し、他のモータを38%パーマロイ又は42%パーマロイで構成することにより、飽和磁束密度と透磁率の双方を大きくすることが可能であるが、磁心208の材料を適宜選択することにより、飽和磁束密度と透磁率の少なくとも一方を大きくするように構成してもよい。
尚、前述したいずれか複数の実施の形態を、相反しない範囲で組み合わせるように構成してもよく、これにより更に大きな効果を得ることが可能である。
また、前記各実施の形態では、特定モータとしてクロノグラフ針駆動用のステッピングモータ110、他のモータとしてカレンダ駆動用のステッピングモータ109や時刻針駆動用のステッピングモータ108の例をあげたが、特定モータや他のモータとして、アナログ電子時計の構成に応じたモータを選定することができる。
この場合、外部磁気の影響は一時的な場合が多いため、特定モータとしては駆動時間が少ないモータを選択し、他のモータとして駆動時間が長いモータを含むように構成することにより、外部磁界の影響をより効果的に抑制することが可能になる。
また、前記各実施の形態では、特定モータとしてクロノグラフ針駆動用のステッピングモータ110、他のモータとしてカレンダ駆動用のステッピングモータ109や時刻針駆動用のステッピングモータ108の例をあげたが、特定モータや他のモータとして、アナログ電子時計の構成に応じたモータを選定することができる。
この場合、外部磁気の影響は一時的な場合が多いため、特定モータとしては駆動時間が少ないモータを選択し、他のモータとして駆動時間が長いモータを含むように構成することにより、外部磁界の影響をより効果的に抑制することが可能になる。
また、前記各実施の形態ではモータが3つの例で説明したが、2つ以上のモータを有するアナログ電子時計に適用可能である。
また、駆動パルスのエネルギを変えるためにパルス幅を変えるようにしてもよく、あるいは、パルス自体を櫛歯波にし、そのON/OFFデューティを変えたり、パルス電圧を変える等によっても、エネルギを変えるようにしてもよい。
また、駆動パルスのエネルギを変えるためにパルス幅を変えるようにしてもよく、あるいは、パルス自体を櫛歯波にし、そのON/OFFデューティを変えたり、パルス電圧を変える等によっても、エネルギを変えるようにしてもよい。
また、本発明に係る電子時計は、カレンダ機能付きアナログ電子時計、クロノグラフ時計等の複数のモータを有するアナログ電子時計に適用可能である。
101・・・電池
102・・・ステッピングモータ制御回路
103・・・発振回路
104・・・分周回路
105・・・制御回路
106・・・ステッピングモータ駆動パルス回路
107・・・磁界検出回路
108〜110・・・ステッピングモータ
201・・・ステータ
202・・・ロータ
203、1501・・・ロータ収容用貫通孔
204、205、1401、1402・・・切り欠き部(内ノッチ)
206、207・・・切り欠き部(外ノッチ)
208・・・磁心
209・・・コイル
210、211・・・可飽和部
301・・・地板
302・・・電池缶
303・・・電池押え
304・・・コイルブロック
305・・・巻真
306・・・ねじ
401・・・ねじ孔
601・・・回路押え
602・・・回路基板
603・・・集積回路
604・・・水晶振動子
605・・・配線パターン
901・・・回転軸
902、1001、1101、1201・・・ロータ磁石
OUT1・・・第1端子
OUT2・・・第2端子
102・・・ステッピングモータ制御回路
103・・・発振回路
104・・・分周回路
105・・・制御回路
106・・・ステッピングモータ駆動パルス回路
107・・・磁界検出回路
108〜110・・・ステッピングモータ
201・・・ステータ
202・・・ロータ
203、1501・・・ロータ収容用貫通孔
204、205、1401、1402・・・切り欠き部(内ノッチ)
206、207・・・切り欠き部(外ノッチ)
208・・・磁心
209・・・コイル
210、211・・・可飽和部
301・・・地板
302・・・電池缶
303・・・電池押え
304・・・コイルブロック
305・・・巻真
306・・・ねじ
401・・・ねじ孔
601・・・回路押え
602・・・回路基板
603・・・集積回路
604・・・水晶振動子
605・・・配線パターン
901・・・回転軸
902、1001、1101、1201・・・ロータ磁石
OUT1・・・第1端子
OUT2・・・第2端子
Claims (21)
- 複数の表示部材を回転駆動する複数のモータをムーブメントに搭載して成るアナログ電子時計において、
前記複数のモータ以外に外部磁界が通る磁性部材を有し、
特定のモータは、前記磁性部材を介して他のモータより多くの外部磁界が通るように配設されると共に、前記他のモータよりも駆動力を強くされて成ることを特徴とするアナログ電子時計。 - 前記特定のモータの駆動エネルギを他のモータよりも大きくして成ることを特徴とする請求項1記載のアナログ電子時計。
- 磁界を検出する磁界検出手段と、
前記磁界検出手段が所定強度以上の磁界を検出したとき、前記特定のモータの駆動エネルギが前記他のモータよりも大きくなるように制御する制御手段とを備えて成ることを特徴とする請求項2記載のアナログ電子時計。 - 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転するロータとを有して成り、
前記特定のモータは前記他のモータよりも前記磁心の磁気抵抗を小さくすることによって駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記特定のモータは、他のモータよりも磁心の断面積を大きくすることによって前記磁心の磁気抵抗が小さくなるように構成されて成ることを特徴とする請求項4記載のアナログ電子時計。
- 前記特定のモータは、他のモータよりも磁心を短くすることによって前記磁心の磁気抵抗が小さくなるように構成されて成ることを特徴とする請求項4記載のアナログ電子時計。
- 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転するロータとを有して成り、
前記特定のモータは、前記他のモータよりもコイルの巻数が多く構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、円柱型のロータ磁石を有し前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転するロータとを備えて成り、
前記特定のモータは、前記他のモータよりもコギングトルクが小さく構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記特定のモータは、前記他のモータよりも前記ロータ磁石の体積が小さく構成されることによって、前記他のモータよりもコギングトルクが小さくなるように構成されて成ることを特徴とする請求項8記載のアナログ電子時計。
- 前記特定のモータは、前記他のモータよりも前記ロータ磁石の外径を小さくする、厚みを薄くする又は回転軸が通る孔の内径を大きくするの少なくとも一つを実施することによって前記ロータ磁石の体積が小さくなるように構成されて成ることを特徴とする請求項9記載のアナログ電子時計。
- 前記特定のモータは、前記他のモータよりも前記ロータ磁石の磁石エネルギの小さい材料で構成されることによって、前記他のモータよりもコギングトルクが小さくなるように構成されて成ることを特徴とする請求項8乃至10のいずれか一に記載のアナログ電子時計。
- 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、前記磁心に接続されロータを回転可能に収容するロータ収容用貫通孔及び前記ロータを所定位置に保持するためのノッチを有するステータと、前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転する前記ロータとを有して成り、
前記特定のモータは、前記他のモータよりも前記ノッチが小さく構成されることによって前記他のモータよりもコギングトルクが小さくなるように構成され、これにより前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、前記磁心に接続されロータを回転可能に収容するロータ収容用貫通孔及び前記ロータを所定位置に保持するためのノッチを有するステータと、前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転する前記ロータとを有して成り、
前記特定のモータは、前記他のモータよりも前記ロータ収容用貫通孔が大きく構成されることによって前記他のモータよりもコギングトルクが小さくなるように構成され、これにより前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記各モータは、磁心と、前記磁心に巻回された駆動コイルと、前記駆動コイルに電流を供給することによって生じる磁界に基づいて回転するロータとを有して成り、
前記特定のモータは、前記他のモータよりも磁心が磁気的に効率の良い材料で構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項1記載のアナログ電子時計。 - 前記特定のモータは、磁心が、飽和磁束密度又は透磁率の少なくとも一方が前記他のモータよりも大きい材料で構成されることによって、前記他のモータよりも駆動力が大きくなるように構成されて成ることを特徴とする請求項14記載のアナログ電子時計。
- 前記特定のモータは、前記磁性部材に直接又は磁性材料を介して間接的に接続されて成ることを特徴とする請求項1乃至15のいずれか一に記載のアナログ電子時計。
- 前記特定のモータは、前記他のモータよりも前記磁性部材により近接して配設されて成ることを特徴とする請求項1乃至16のいずれか一に記載のアナログ電子時計。
- 前記磁性部材は、磁性材料によって形成された電池缶であることを特徴とする請求項1乃至17のいずれか一に記載のアナログ電子時計。
- 前記磁性部材は、磁性材料によって形成された回路押えであることを特徴とする請求項1乃至17のいずれか一に記載のアナログ電子時計。
- 前記特定のモータは常時駆動されるモータではなく、前記他のモータには常時駆動されるモータが含まれて成ることを特徴とする請求項1乃至19のいずれか一に記載のアナログ電子時計。
- 前記特定のモータが回転駆動する表示部材はクロノグラフ針又はカレンダであり、前記常時駆動される他のモータによって駆動される表示部材は時刻針であることを特徴とする請求項20記載のアナログ電子時計。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011196344A JP2012150094A (ja) | 2010-12-29 | 2011-09-08 | アナログ電子時計 |
| US13/374,141 US20120170426A1 (en) | 2010-12-29 | 2011-12-13 | Analogue electronic timepiece |
| CN201110444213XA CN102540862A (zh) | 2010-12-29 | 2011-12-27 | 模拟电子钟表 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010294478 | 2010-12-29 | ||
| JP2010294478 | 2010-12-29 | ||
| JP2011196344A JP2012150094A (ja) | 2010-12-29 | 2011-09-08 | アナログ電子時計 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012150094A true JP2012150094A (ja) | 2012-08-09 |
Family
ID=46347963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011196344A Withdrawn JP2012150094A (ja) | 2010-12-29 | 2011-09-08 | アナログ電子時計 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20120170426A1 (ja) |
| JP (1) | JP2012150094A (ja) |
| CN (1) | CN102540862A (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5939222B2 (ja) | 2013-09-27 | 2016-06-22 | カシオ計算機株式会社 | ステッピングモータ及び時計 |
| CN105116711B (zh) * | 2015-08-26 | 2017-09-15 | 钟语 | 一种机芯装置和钟表 |
| JP7192750B2 (ja) * | 2019-11-26 | 2022-12-20 | カシオ計算機株式会社 | 指針駆動装置、電子時計、指針駆動方法およびプログラム |
| CN215870937U (zh) * | 2021-09-03 | 2022-02-18 | 徐沛坚 | 一种振镜电机用的定子结构 |
| CN113839475A (zh) * | 2021-09-03 | 2021-12-24 | 徐沛坚 | 一种振镜电机装置 |
| EP4383552A1 (fr) * | 2022-12-06 | 2024-06-12 | ETA SA Manufacture Horlogère Suisse | Circuit de commande d'un moteur pas-à-pas capable de détecter un champ magnétique extérieur |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5174663A (ja) * | 1974-12-23 | 1976-06-28 | Seiko Instr & Electronics | |
| JPS53102080A (en) * | 1977-02-17 | 1978-09-06 | Seiko Epson Corp | Magnetisum resistant structure of thin type crystal watch |
| US4496246A (en) * | 1980-10-21 | 1985-01-29 | Kabushiki Kaisha Suwa Seikosha | Timepiece construction |
| JPH01148887U (ja) * | 1988-04-05 | 1989-10-16 |
-
2011
- 2011-09-08 JP JP2011196344A patent/JP2012150094A/ja not_active Withdrawn
- 2011-12-13 US US13/374,141 patent/US20120170426A1/en not_active Abandoned
- 2011-12-27 CN CN201110444213XA patent/CN102540862A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20120170426A1 (en) | 2012-07-05 |
| CN102540862A (zh) | 2012-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8698443B2 (en) | Stepping motor control circuit and analog electronic timepiece | |
| JP2012150094A (ja) | アナログ電子時計 | |
| JP6414115B2 (ja) | ステッピングモータ、モータ駆動装置及び時刻表示装置 | |
| JP2010154673A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| US20110188352A1 (en) | Stepping motor control circuit and analogue electronic watch | |
| JP2013148571A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2010169656A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2014219231A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2018057076A (ja) | ステッピングモータ、回転検出装置、および電子時計 | |
| JP2010220408A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2010151641A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP3612400B2 (ja) | 多重回転子電気機械式トランスジューサ、及び、この種トランスジューサの制御方法 | |
| JP2014196986A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP6312078B2 (ja) | ステップモータ、ステップモータ駆動制御方法、時計用ムーブメントおよび時計 | |
| JP2013057633A (ja) | アナログ電子時計 | |
| HK1172402A (en) | Analog electronic timepiece | |
| JP2014090589A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2011075463A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2013242193A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP6134487B2 (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2014096900A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2013257241A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP2011050164A (ja) | ステッピングモータ制御回路及びアナログ電子時計 | |
| JP2014183624A (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 | |
| JP6257709B2 (ja) | ステッピングモータ制御回路、ムーブメント及びアナログ電子時計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20141202 |