JP2012151954A - リニアモータ - Google Patents
リニアモータ Download PDFInfo
- Publication number
- JP2012151954A JP2012151954A JP2011007689A JP2011007689A JP2012151954A JP 2012151954 A JP2012151954 A JP 2012151954A JP 2011007689 A JP2011007689 A JP 2011007689A JP 2011007689 A JP2011007689 A JP 2011007689A JP 2012151954 A JP2012151954 A JP 2012151954A
- Authority
- JP
- Japan
- Prior art keywords
- coils
- pair
- wire
- coil
- magnets
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000463 material Substances 0.000 claims abstract description 9
- 230000002093 peripheral effect Effects 0.000 claims description 78
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 8
- 238000004804 winding Methods 0.000 description 6
- 230000004907 flux Effects 0.000 description 5
- 229910052742 iron Inorganic materials 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000012811 non-conductive material Substances 0.000 description 2
- 238000001816 cooling Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
Images



Landscapes
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Abstract
【課題】コイルへの電力供給を好適に行うことができるリニアモータを提供する。
【解決手段】リニアモータ1は、複数の磁石11と、複数のコイル19と、複数のコイル19全体に対して駆動方向の両側に配置され、複数のコイル19全体を複数の磁石11に対して駆動方向に揺動可能に支持する1対の板ばね23と、複数のコイル19に電圧を印加するための1対の端子9とを有する。各コイル19は奇数層巻きとされ、線材25が軸方向の両側の端面19fから延出している。1対の板ばね23は、線材25の、複数のコイル19全体の軸方向外側に面する1対の端面19fから延出する1対の線材端部(25s、25e)に接続されている。1対の端子9は、1対の板ばね23に接続されており、1対の板ばね23を介して複数のコイル19と導通可能とされている。
【選択図】図1
【解決手段】リニアモータ1は、複数の磁石11と、複数のコイル19と、複数のコイル19全体に対して駆動方向の両側に配置され、複数のコイル19全体を複数の磁石11に対して駆動方向に揺動可能に支持する1対の板ばね23と、複数のコイル19に電圧を印加するための1対の端子9とを有する。各コイル19は奇数層巻きとされ、線材25が軸方向の両側の端面19fから延出している。1対の板ばね23は、線材25の、複数のコイル19全体の軸方向外側に面する1対の端面19fから延出する1対の線材端部(25s、25e)に接続されている。1対の端子9は、1対の板ばね23に接続されており、1対の板ばね23を介して複数のコイル19と導通可能とされている。
【選択図】図1
Description
本発明は、ボイスコイルモータ等のリニアモータに関する。
ばねにより磁石に対して揺動可能に支持されたコイルを有するリニアモータが知られている(特許文献1等)。
上記のようなコイルが駆動されるリニアモータにおいては、磁石が駆動されるリニアモータに比較して、コイルに電力を供給することが難しい。これは、例えば、電力供給のための導線(コイルを構成する線材の両端を含む)が冗長に引き回されると、コイルの移動に伴って導線が磁石等に引っ掛かる蓋然性が高くなることなどからである。特許文献1では、導線を収容する溝部をコイルが巻かれるボビンに形成することなどにより、導線の引き回しを好適に行うことができるようにしているが、ボビンの形状が複雑になる等の不都合を生じている。
本発明の目的は、コイルへの電力供給を好適に行うことができるリニアモータを提供することにある。
本発明の一態様に係るリニアモータは、磁極を駆動方向に直交する方向に向けて前記駆動方向に配列された複数の磁石と、前記駆動方向に同軸的に配置され、外周面又は内周面が前記複数の磁石の磁極に面する複数のコイルと、前記複数のコイル全体に対して前記駆動方向の両側に配置され、前記複数のコイル全体を前記複数の磁石に対して前記駆動方向に揺動可能に支持する1対のばねと、前記複数のコイルに電圧を印加するための1対の端子と、を有し、前記複数のコイルそれぞれにおいては、線材が、軸方向の位置をずらしつつ巻かれることにより線材の一の層が構成され、当該一の層が構成される毎に前記線材の軸方向の位置をずらす方向を反転することにより複数の層が内周側から外周側へ積層され、前記複数の層の数が奇数とされることにより前記線材が各コイルの軸方向の両側のコイル端面から延出しており、隣接するコイル同士は、前記線材の、互いに対向するコイル端面から延出した部分同士により接続されており、前記1対のばねは、前記線材の、前記複数のコイル全体の軸方向外側に面する1対のコイル端面から延出する1対の線材端部に接続されており、前記1対の端子は、前記1対のばねに接続されており、前記1対のばねを介して前記複数のコイルと導通可能とされている。
好適には、前記線材が巻かれて前記複数のコイルを保持するボビンを更に有し、前記ボビンの外周面には、前記複数のコイルが収容される複数の凹部と、前記複数の凹部間に延び、前記線材の前記複数のコイル間の部分を収容する第1溝部と、前記複数の凹部全体の軸方向両端から前記ボビンの軸方向両外側へ延び、前記1対の線材端部を収容する1対の第2溝部と、が形成されており、前記1対のばねは、前記ボビンの軸方向両外側から前記第2溝部内に露出する部分を有し、当該露出する部分に、前記1対の線材端部が接続されている。
好適には、前記複数の磁石の前記複数のコイルとは反対側に配置され、前記複数の磁石が固定された磁石側ヨークと、前記複数のコイルの前記複数の磁石とは反対側に配置されたコイル側ヨークと、前記磁石側ヨークと前記コイル側ヨークとを連結する連結部材と、を有し、前記1対のばねは、磁石側ヨーク、前記コイル側ヨーク及び前記連結部材に支持されるとともに前記複数のコイル全体を支持することにより、前記複数の磁石に対して前記複数のコイル全体を揺動可能に支持している。
好適には、前記連結部材は、非磁性体により形成されている。
好適には、前記複数のコイルの内周面及び外周面の一方の面と、当該一方の面と対向する、前記複数の磁石又は前記複数の磁石に対して固定的な部材とのクリアランスが、前記線材の直径以下である。
好適には、前記1対のばねそれぞれは、板ばねにより構成されており、各板ばねは、前記複数の磁石に固定的な磁石側固定部と、前記複数のコイルに固定的なコイル側固定部と、前記磁石側固定部と前記コイル側固定部とを連結する複数のアームと、を有し、各板ばねにおいて、前記1対の端子の一方及び前記線材は、前記磁石側固定部及び前記コイル側固定部の、前記複数のアームのうちの一のアームの両端に連結される部分に接続されている。
上記の構成によれば、コイルへの電力供給を好適に行うことができる。
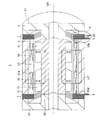
図1は、本発明の実施形態に係るリニアモータ1を示す断面図である。なお、図1では、理解を容易にするために、斜視図のようにリニアモータ1の奥行きも示されている。リニアモータ1は、その外形が概ね円柱状に形成されており、図1は、その円柱の中心軸(軸CA)に沿う断面を示している。
リニアモータ1は、軸CA方向に駆動力を発揮するいわゆるボイスコイル型モータとして構成されている。リニアモータ1は、固定子3と、固定子3に対して軸CA方向へ移動可能な可動子5と、可動子5を軸CA方向に揺動可能に支持する1対のばねアセンブリ7と、不図示の電源装置から電力が供給される1対の端子9とを有している。
固定子3は、1対の磁石11と、磁石11に係る磁気回路を好適に形成するためのセンターヨーク13及び外ヨーク15と、これらヨークを連結するための1対の連結部材17とを有している。可動子5は、1対のコイル19と、コイル19を保持するボビン21とを有している。
磁石11は、概ね軸CAを中心とする円環状に設けられている。なお、磁石11は、環状に一体形成されていてもよいし、複数の磁石が環状に配列されることにより構成されていてもよい。磁石11の軸CAに平行な断面形状は例えば矩形である。磁石11は、半径方向(駆動方向に直交する方向)に磁化されている。また、1対の磁石11は、磁極の向きが互いに逆向きとされている。
センターヨーク13及び外ヨーク15は、磁性体により形成されている。磁性体は、例えば、鉄(SS400等)である。これらヨークは、概ね軸CAを軸とする円筒状に設けられている。なお、これらヨークは、円筒状に一体形成されていてもよいし、複数の磁性体が環状に配列されることにより構成されていてもよい。また、リニアモータ1の冷却が好適に行われることなどを目的として適宜にスリットが形成されていてもよい。
外ヨーク15の内径は、センターヨーク13の外径よりも大きく、センターヨーク13の外周面と、外ヨーク15の内周面との間には、磁石11及び可動子5を収容する空間が形成されている。磁石11はセンターヨーク13の外周面に固定されている。固定は、例えば、接着剤若しくはボルトにより行われる。
連結部材17は、非磁性体により形成されている。非磁性体は、例えば、銅、アルミニウム、ステンレス、樹脂である。連結部材17は、概略形状が概ね軸CAを中心とする円盤状とされており、センターヨーク13と外ヨーク15との間の隙間を軸CA方向の外側から塞ぐように配置され、センターヨーク13及び外ヨーク15それぞれに固定されている。固定は、例えば、接着剤若しくはボルトにより行われる。なお、連結部材17は、軸CA方向の一方のみに設けられていてもよい。
コイル19は、概ね軸CAを中心とする円環状に形成されている。コイル19の軸CAに平行な断面形状は概ね矩形である。コイル19の内径は、磁石11の外径よりも大きく、コイル19の内周面は、磁石11の外周面(磁極)に対向している。1対のコイル19の中心位置間の軸CA方向の距離と、1対の磁石11の中心位置間の軸CA方向の距離は、概ね同一とされている。
ボビン21は、樹脂等の非磁性且つ非導電性の材料により形成されている。ボビン21は、概ね軸CAを中心とする円筒状に形成されている。ただし、その外周面には環状に延びる凹部21aが形成されており、コイル19が嵌合している。なお、コイル19の外周面とボビン21の外周面(凹部21aが形成されていない領域)とは面一であることが好ましい。
ボビン21の内周面は、磁石11の外周面と所定のクリアランスで対向している。また、コイル19の外周面及びボビン21の外周面は、外ヨーク15の内周面と所定のクリアランスで対向する。これらのクリアランスは、比較的狭く設定されることが好ましく、例えば、コイル19を構成する線材25(図2参照)の直径以下であることが好ましい。
ばねアセンブリ7は、複数枚の板ばね23が軸CA方向に積層されて構成されている。板ばね23は、概ね軸CAを中心とする円環状に形成されており、外周側部分が固定子3(具体的には外ヨーク15及び連結部材17の少なくとも一方)に、内周側部分が可動子5(具体的にはボビン21)に固定されている。固定は、例えば、接着剤若しくはボルトにより行われる。例えば、外ヨーク15及び連結部材17がボルトにより互いに固定され、板ばね23は、外ヨーク15及び連結部材17に挟持される。
板ばね23は、導電性の材料により形成されており、後述するように、端子9とコイル19とを電気的に接続することにも利用される。板ばね23の材料は、非磁性であることが好ましく、このような非磁性且つ導電性の材料としては、例えば、銅、アルミニウム、ステンレスが挙げられる。とりわけ、寿命や電気抵抗の観点からステンレスが好ましい。
端子9は、複数の板ばね23のうち、最もコイル19側に位置する板ばね23に接続されている。なお、端子9は、板ばね23と一体的に形成されていてもよいし、板ばね23とは別部材により形成され、板ばね23に固定されていてもよい。端子9は、例えば、板ばね23の外周縁から突出している。
なお、特に図示しないが、リニアモータ1においては、固定子3内の可動子5の運動を固定子3の外部へ取り出すために、センターヨーク13、外ヨーク15及び連結部材17の適宜な位置に孔部が形成され、当該孔部を介して不図示の被駆動部材が可動子5に連結される。
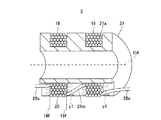
図2は、図1の一部(可動子5)をより模式的に示す図である。
2つのコイル19は、1本の線材25がボビン21に巻かれることにより構成されている。より具体的には、各コイル19において、線材25は、まず、ボビン21に当接して巻かれていく。この際、矢印y1によって示されるように、線材25のうち、新たにボビン21に巻かれる部分の位置は、1巻きに対して線材25の直径に相当する量で軸CA方向の一方側(図2では紙面右側)へずらされていく。これにより、コイル19の最も内周側の層が形成されていく。
コイル19の最も内周側の層が形成されると、線材25のうち新たにボビン21に巻かれる部分の位置を、軸CA方向の他方側(図2では紙面左側)へずらしていく。これにより、コイル19の内周側から2層目の部分が形成されていく。同様の動作を繰り返すことにより、線材25は、線材25の層を形成しつつ内周側から外周側へ巻かれて行くことになる。
なお、内周側から外周側への複数の層において、コイル19の軸CA方向における線材25の配列数は、軸CA方向に面するコイル19の端面19fが概ね平面となるように設定されている。例えば、軸CA方向における線材25の配列数は、複数の層間において互いに同一に設定されている。又は、各層の軸CA方向における線材25の配列数は、隣接する層に対して1多く若しくは1少なく、且つ、2つ隣りの層と互いに同一に設定されている。
各コイル19において、内周側から外周側への線材25の層の数は奇数とされている。従って、線材25は、各コイル19の軸方向の両側の端面19fから延出している。なお、内周側から外周側への線材25の層の数が偶数とされると、線材25は軸CA方向の一方側のみから延出する。
2つのコイル19同士は、線材25の、互いに対向する端面19fから延出した部分同士(これらを合わせて中間部25m)により接続されている。また、2つのコイル19の外側に面する端面19fから延出した部分(始端25s、終端25e)は、端子9と接続された板ばね23に接続される(図1)。
図3は、可動子5を図1及び図2の紙面下方(駆動方向に直交する方向)から見た図である。
矢印y3及びy5は、各コイル19における、線材25の始端25s側から終端25e側への巻き方向を示している。矢印y3及びy5によって示されるように、2つのコイル19は、互いに逆巻きとされている。従って、始端25s及び終端25eに電圧が印加されると、2つのコイル19には、軸CA回りの回転方向が互いに逆向きの電流が流れる。
ボビン21の外周面には、始端25s、終端25e及び中間部25mを収容するための溝部21s、21e及び21mが形成されている(図1及び図2も参照)。溝部21s及び21eは、凹部21aとボビン21の軸方向外側とを連通し、溝部21mは、2つの凹部21aを連通している。
これら溝部は、好適には、軸CAに平行に形成される。これら溝部の深さは、少なくとも線材25がコイル19の内周側(軸CA側)から延出する付近(図2において各コイル19の紙面左側)においては、凹部21aの深さと同等以上とされ、他の位置においては、線材25の直径以上とされる。なお、図2では、溝部の深さは、全体に亘って、凹部21aの深さと同等とされている。また、これら溝部の幅は、線材25の直径以上とされる。
なお、図1〜図3では、溝部21s、21e及び21m(始端25s、終端25e及び中間部25m)の軸CA回りの位置が互いに同一である。換言すれば、これら溝部(線材の延出部分)は径方向に見て同一線上に配置されている。ただし、これら溝部(線材の延出部分)は、軸CA回りの位置が互いに異なっていてもよい。また、図1では、これら溝部の軸CA回りの位置と、端子9の軸CA回りの位置とが同一とされているが、これらは互いに異なっていてよい(後述する図4では異なる場合を例示する。)。
図4は、端子9が接続された板ばね23を軸CA方向に見た模式図である。なお、端子9の接続を除いては、他の板ばね23も図4に示す板ばね23と同様の構成である。
板ばね23は、例えば、円環状の板に螺旋状の複数のスリット23sが形成されたものである。そして、板ばね23は、固定子3に固定される外周側固定部23aと、可動子5に固定される内周側固定部23bと、外周側固定部23aと内周側固定部23bとを連結する複数のアーム23cとを有している。
アーム23cの弾性変形により、外周側固定部23aと内周側固定部23bとの軸CA方向(図4の紙面貫通方向)における相対移動が許容され、ひいては、固定子3に対する可動子5の軸CA方向の揺動が許容される。なお、複数の板ばね23は、復元力の軸CA回りの分布に偏りが生じないように、互いに軸CA回りの位置を均等にずらして重ねられることが好ましい。
端子9は、外周側固定部23aに接続され、線材25の始端25s又は終端25eは、内周側固定部23bの接続部23dに接続される。接続部23dは、ボビン21の軸CA方向外側から溝部21s又は21e内に露出する。
なお、線材25と接続部23dとの接続は、例えば、半田によりなされる。接続部23dは、板ばね23の任意の部位とされ、他の部分と構成が同一であってもよいし、接続を強固にするためのメッキがなされているなど、他の部分と構成が異なっていてもよい。
好適には、端子9及び接続部23dは、外周側固定部23a及び内周側固定部23bの、一のアーム23cの両端に連結される部分に設けられている。従って、矢印y7に示すように、端子9から接続部23dへの電流の経路は、概ねアーム23cの1本分の長さとなる。なお、図1では、端子9の図示の都合上、接続部23dが露出する溝部21s又は21eの軸CA回りの位置と、端子9の軸CA回りの位置とは同一とされている。
図5は、図1の領域Vの拡大図である。
端子9が設けられた板ばね23は、他の導電性の部材と絶縁されている。具体的には、例えば、端子9が設けられた板ばね23と他の板ばね23との間、及び、端子9が設けられた板ばね23と外ヨーク15との間には絶縁層27が形成されている。絶縁層27は、例えば、ゴム若しくは可撓性の樹脂により形成されている。
以上の構成を有するリニアモータ1の動作について説明する。
図1において矢印y11で示すように、リニアモータ1においては、磁石11により磁界が形成される。具体的には、外周側にN極を向けている磁石11(図1の紙面右側の磁石11)のN極から出た磁力線は、当該磁石11に対向するコイル19を半径方向外側に貫通し、外ヨーク15を軸CA方向へ進み、隣のコイル19を半径方向内側に貫通し、隣の磁石11のS極に入る。内周側にN極を向けている磁石11(図1の紙面左側の磁石11)のN極から出た磁力線は、センターヨーク13を軸CA方向へ進み、隣の磁石11のS極に入る。このように、磁石11の磁束は、コイル19をその半径方向に貫通する。
従って、1対の端子9に電圧が印加され、コイル19に電流が流されると、フレミングの左手の法則により、磁界(磁石11)に対してコイル19を駆動させる軸CA方向の力が生じる。2つのコイル19は、磁束の貫通方向が互いに逆向きであるが、電流の向きも互いに逆向きであるので、互いに同一方向の力を生じる。
コイル19には、交流電圧が印加される。従って、電圧の大きさ及び向きの変化に伴って、コイル19において生じる力の大きさ及び向きも変動する。そして、交流電圧(力)の周波数が被駆動対象等の質量及びばねアセンブリ7等の復元力により規定される固有振動数と概ね同等とされると、共振が生じ、大きな駆動力が得られる。なお、交流電圧は、正弦波等により表わされる、電位が連続的に変化するものであってもよいし、パルス状の、電位の変化が不連続なものであってもよい。
ここで、リニアモータ1は、センターヨーク13及び外ヨーク15とも磁石11に対して固定的とされる構成であり、また、磁石11に対して相対移動するボビン21は、非導電性の材料により構成されている。従って、磁石11が他の部材に対して相対移動することによる渦電流の発生が抑制される。換言すれば、コイル駆動であることから磁石駆動である場合に比較して鉄損が少なくなる。また、2つのコイル19には、互いに逆向きに電流が流れることから、各コイル19において電流が流れることにより生じる磁束は逆向きとなり、互いに相殺され、鉄損が低減される。
以上の実施形態によれば、リニアモータ1は、磁極を駆動方向(軸CA方向)に直交する方向に向けて駆動方向に配列された複数(本実施形態では2つ)の磁石11と、駆動方向に同軸的に配置され、外周面又は内周面(本実施形態では内周面)が複数の磁石11の磁極に面する複数(本実施形態では2つ)のコイル19(コイルアセンブリ)と、複数のコイル19全体に対して駆動方向の両側に配置され、複数のコイル19全体を複数の磁石11に対して駆動方向に揺動可能に支持する1対の板ばね23と、複数のコイル19に電圧を印加するための1対の端子9とを有する。複数のコイル19それぞれにおいては、線材25が、軸方向の位置をずらしつつ巻かれることにより線材25の一の層が構成され、当該一の層が構成される毎に線材25の軸方向の位置をずらす方向を反転することにより複数の層が内周側から外周側へ積層され、複数の層の数が奇数とされることにより線材25が各コイル19の軸方向の両側の端面19fから延出している。隣接するコイル19同士は、線材25の、互いに対向する端面19fから延出した部分同士により接続されている。1対の板ばね23(ばねアセンブリ7のうち最もコイル19側のもの)は、線材25の、複数のコイル19全体の軸方向外側に面する1対の端面19fから延出する1対の線材端部(25s、25e)に接続されている。1対の端子9は、上記の1対の板ばね23に接続されており、1対の板ばね23を介して複数のコイル19と導通可能とされている。
従って、複数のコイル19に電圧を印加するための導線(線材25)が冗長に引き回されることがない。その結果、導線が他の部材に引っ掛かることを抑制して、好適にコイル19に電力を供給することができる。また、配線の簡素化に伴う線材25の巻き工程の容易化、及び、ボビン21の形状の簡素化が可能であり、ひいては、コスト削減が期待される。
リニアモータ1は、線材25が巻かれて複数のコイル19を保持するボビン21を更に有する。ボビン21の外周面には、複数のコイル19が収容される複数の凹部21aと、複数の凹部21a間に延び、線材25の複数のコイル19間の中間部25mを収容する溝部21mと、複数の凹部21a全体の軸CA方向両端からボビン21の軸CA方向両外側へ延び、1対の線材端部(始端25s、終端25e)を収容する1対の溝部21s及び21eとが形成されている。1対の板ばね23(端子9が形成された板ばね23)は、ボビン21の軸CA方向両外側から溝部21s及び21e内に露出する接続部23dを有し、接続部23dに、始端25s及び終端25eが接続されている。
従って、中間部25m、始端25s及び終端25eは、ボビン21に収容され、ボビン21の外部に引き回される必要がない。従って、線材25が他の部材に引っ掛かる蓋然性が一層低減される。
リニアモータ1は、複数の磁石11の複数のコイル19とは反対側に配置され、複数の磁石11が固定されたセンターヨーク13と、複数のコイル19の複数の磁石11とは反対側に配置された外ヨーク15と、これらヨークを連結する連結部材17とを有する。1対の板ばね23(端子9が形成された板ばね23)は、センターヨーク13、外ヨーク15及び連結部材17に対して支持されるとともに複数のコイル19全体を支持することにより、複数の磁石11に対して複数のコイル19全体を揺動可能に支持している。
従って、上述のように、磁石11がヨークに対して移動せず、渦電流の発生が抑制される構成が実現される。このような構成が連結部材17を含む複数部材の組み合わせにより構成されることから、設計変更等が容易である。
連結部材17は、非磁性体により形成されている。従って、連結部材17が磁性体により形成された場合(この場合も本発明に含まれる)に比較して、磁束密度のバランスが良好となり、安定した駆動力が得られる。
複数のコイル19の外周面と、当該外周面と対向し、複数の磁石11に対して固定的な外ヨーク15とのクリアランスが、線材25の直径以下である。従って、リニアモータ1の小型化を図ることができる。また、コイル19の位置における磁束が高くなることも期待される。なお、このようなクリアランスの設定は、上述した簡素な配線によって、導線がコイル19の外周面上を通過する必要が無くなることにより好適に実現される。
1対の板ばね23(端子9が形成された板ばね23)それぞれは、複数の磁石11に固定的な外周側固定部23aと、複数のコイル19に固定的な内周側固定部23bと、これらを連結する複数のアーム23cとを有する。各板ばね23において、端子9及び線材25は、外周側固定部23a及び内周側固定部23bの、複数のアーム23cのうちの一のアーム23cの両端に連結される部分に接続されている。
従って、好適に復元力を得ることができるとともに、図4において矢印y7を参照して説明したように、板ばね23の概ね最短経路において電流が流れることになり、鉄損が生じることが抑制される。
なお、以上の実施形態において、溝部21mは本発明の第1溝部の一例であり、溝部21s及び21eは本発明の1対の第2溝部の一例であり、センターヨーク13は本発明の磁石側ヨークの一例であり、外ヨーク15は本発明のコイル側ヨークの一例であり、外周側固定部23aは本発明の磁石側固定部の一例であり、内周側固定部23bは本発明のコイル側固定部の一例である。
本発明は、以上の実施形態に限定されず、種々の態様で実施されてよい。
本願発明は、コイルが可動子を構成するリニアモータに好適に適用されるが、磁石が可動子を構成するリニアモータ並びにコイル及び磁石の双方が他の部材に対して可動子となるリニアモータに適用されてもよい。
ヨーク、連結部材及びボビンは必須要件ではなく、適宜に省略されてもよい。また、ボビンはヨークを兼ねてもよい。
磁石及びコイルの位置関係は、コイルの内周側に磁石が配置されるものに限定されない。すなわち、コイルの外周側に磁石が配置されてもよいし、コイルの内周側と外周側との双方に磁石が配置されてもよい。
上記に関連して、実施形態では、コイルの外周面がヨークに所定のクリアランスで対向したが、コイルの外周面はコイルの外周側に配置された磁石に所定のクリアランスで対向してもよいし、ボビンが省略されてコイルの内周面がコイルの内周側に配置された磁石若しくはヨークに所定のクリアランスで対向してもよい。
ばねは、板ばねに限定されない。例えば、実施形態のボビン21の軸CA方向の端面と連結部材17の軸CAに直交する内側面との間に配置されたコイルばねであってもよい。
また、ばねが板ばねである場合において、板ばねは、外周側からコイルを支持するもの、若しくは、コイルの磁石とは反対側からコイルを支持するものに限定されない。すなわち、板ばねは、内周側(上述のように内周側は磁石側であってもコイル側であってもよい。)からコイルを支持してもよいし、磁石側(上述のように磁石側は内周側であっても外周側であってもよい。)からコイルを支持してもよい。また、板ばねは、複数枚重ねられる必要はなく、1枚のみで用いられてもよい。
複数の磁石の数及び複数のコイルの数は2つに限定されない。すなわち、これらの数は3つ以上であってもよい。複数のコイルは、1本の線材により構成されていなくてもよい。例えば、隣接するコイル間等において2本の線材が互いに接続され、実質的に1本の線材とされていてもよい。線材は、丸線に限定されず、平角線であってもよい。
コイルは、完全な整列巻きである必要はなく、一部に乱れが生じていてもよい。ただし、完全な整列巻きに近いほど、導線の引き回しを短くしたことによるリニアモータの小型化の効果が得られやすい。整列巻きにおいて、線材の各層における各部は、隣接する層の線材の各部の軸(CA)方向の間に位置せず、隣接する層の線材の各部と軸方向の位置が同一であってもよい(特に平角線の場合。)。
磁石、コイル、ヨーク、連結部材及びばねは、駆動方向に見て円形に形成されていなくてもよく、例えば、楕円形若しくは矩形状に形成されていてもよい。また、磁石、ヨーク、連結部材及びばねは、駆動方向に見て環状に形成されていなくてもよく、例えば、駆動方向に対する一の側方においてのみ設けられていてもよい。
線材とばねとは他の部材を介して接続されていてもよいし、ばねと端子とは他の部材を介して接続されていてもよい。端子は、ばねと一体化される場合、必ずしもばねと区別可能である必要はない。例えば、ばねを介してコイルに電圧を印加するための配線がばねの適宜な部位に接続されていれば、当該部位が端子である。
リニアモータは、交流電流が供給されて利用されるだけでなく、直流電流が供給されて利用されてもよいし、線材を一方向へ流れる電流のみが周期的に供給されて利用されてもよい。
なお、本願発明のリニアモータは、冷凍機用のコンプレッサ等、適宜な機器に用いられてよい。
1…リニアモータ、9…端子、11…磁石、19…コイル、19f…端面、23…板ばね、25…線材、25s…始端(線材端部)、25e…終端(線材端部)。
Claims (6)
- 磁極を駆動方向に直交する方向に向けて前記駆動方向に配列された複数の磁石と、
前記駆動方向に同軸的に配置され、外周面又は内周面が前記複数の磁石の磁極に面する複数のコイルと、
前記複数のコイル全体に対して前記駆動方向の両側に配置され、前記複数のコイル全体を前記複数の磁石に対して前記駆動方向に揺動可能に支持する1対のばねと、
前記複数のコイルに電圧を印加するための1対の端子と、
を有し、
前記複数のコイルそれぞれにおいては、線材が、軸方向の位置をずらしつつ巻かれることにより線材の一の層が構成され、当該一の層が構成される毎に前記線材の軸方向の位置をずらす方向を反転することにより複数の層が内周側から外周側へ積層され、前記複数の層の数が奇数とされることにより前記線材が各コイルの軸方向の両側のコイル端面から延出しており、
隣接するコイル同士は、前記線材の、互いに対向するコイル端面から延出した部分同士により接続されており、
前記1対のばねは、前記線材の、前記複数のコイル全体の軸方向外側に面する1対のコイル端面から延出する1対の線材端部に接続されており、
前記1対の端子は、前記1対のばねに接続されており、前記1対のばねを介して前記複数のコイルと導通可能とされている
リニアモータ。 - 前記線材が巻かれて前記複数のコイルを保持するボビンを更に有し、
前記ボビンの外周面には、
前記複数のコイルが収容される複数の凹部と、
前記複数の凹部間に延び、前記線材の前記複数のコイル間の部分を収容する第1溝部と、
前記複数の凹部全体の軸方向両端から前記ボビンの軸方向両外側へ延び、前記1対の線材端部を収容する1対の第2溝部と、
が形成されており、
前記1対のばねは、前記ボビンの軸方向両外側から前記第2溝部内に露出する部分を有し、当該露出する部分に、前記1対の線材端部が接続されている
請求項1に記載のリニアモータ。 - 前記複数の磁石の前記複数のコイルとは反対側に配置され、前記複数の磁石が固定された磁石側ヨークと、
前記複数のコイルの前記複数の磁石とは反対側に配置されたコイル側ヨークと、
前記磁石側ヨークと前記コイル側ヨークとを連結する連結部材と、
を有し、
前記1対のばねは、磁石側ヨーク、前記コイル側ヨーク及び前記連結部材に支持されるとともに前記複数のコイル全体を支持することにより、前記複数の磁石に対して前記複数のコイル全体を揺動可能に支持している
請求項1又は2に記載のリニアモータ。 - 前記連結部材は、非磁性体により形成されている
請求項3に記載のリニアモータ。 - 前記複数のコイルの内周面及び外周面の一方の面と、当該一方の面と対向する、前記複数の磁石又は前記複数の磁石に対して固定的な部材とのクリアランスが、前記線材の直径以下である
請求項1〜4のいずれか1項に記載のリニアモータ。 - 前記1対のばねそれぞれは、板ばねにより構成されており、
各板ばねは、
前記複数の磁石に固定的な磁石側固定部と、
前記複数のコイルに固定的なコイル側固定部と、
前記磁石側固定部と前記コイル側固定部とを連結する複数のアームと、
を有し、
各板ばねにおいて、前記1対の端子の一方及び前記線材は、前記磁石側固定部及び前記コイル側固定部の、前記複数のアームのうちの一のアームの両端に連結される部分に接続されている
請求項1〜5のいずれか1項に記載のリニアモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011007689A JP2012151954A (ja) | 2011-01-18 | 2011-01-18 | リニアモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011007689A JP2012151954A (ja) | 2011-01-18 | 2011-01-18 | リニアモータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012151954A true JP2012151954A (ja) | 2012-08-09 |
Family
ID=46793689
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011007689A Pending JP2012151954A (ja) | 2011-01-18 | 2011-01-18 | リニアモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012151954A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103560639A (zh) * | 2013-11-20 | 2014-02-05 | 东南大学 | 一种高功率因数直线往复振荡电机 |
| CN106113028A (zh) * | 2016-07-06 | 2016-11-16 | 山东大学 | 一种多驱动三自由度的板簧型微纳操作平台及方法 |
| WO2020060144A1 (ko) * | 2018-09-17 | 2020-03-26 | 엘지전자 주식회사 | 리니어 모터 및 리니어 압축기 |
| JPWO2020045470A1 (ja) * | 2018-08-28 | 2020-09-03 | ミネベアミツミ株式会社 | 振動アクチュエータ及び電子機器 |
| WO2025021886A1 (de) * | 2023-07-27 | 2025-01-30 | Trumpf Schweiz Ag | Einrichtung zur bewegung einer optik und laserbearbeitungsvorrichtung |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0467365A (ja) * | 1990-07-03 | 1992-03-03 | Canon Inc | 磁気ヘッドアクチュエータ |
| JP2000329064A (ja) * | 1999-04-16 | 2000-11-28 | Litton Syst Inc | 一体型たわみばね回線及び電動リニアモータを用いた往復動コンプレッサー及びその運転方法 |
| JP2004088992A (ja) * | 2002-05-24 | 2004-03-18 | Murata Mfg Co Ltd | ボイスコイル型リニアアクチュエータ及びこのアクチュエータを用いた装置、並びにこのアクチュエータの製造方法 |
| WO2005101083A1 (ja) * | 2004-04-13 | 2005-10-27 | Matsushita Electric Industrial Co., Ltd. | カメラモジュール |
-
2011
- 2011-01-18 JP JP2011007689A patent/JP2012151954A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0467365A (ja) * | 1990-07-03 | 1992-03-03 | Canon Inc | 磁気ヘッドアクチュエータ |
| JP2000329064A (ja) * | 1999-04-16 | 2000-11-28 | Litton Syst Inc | 一体型たわみばね回線及び電動リニアモータを用いた往復動コンプレッサー及びその運転方法 |
| JP2004088992A (ja) * | 2002-05-24 | 2004-03-18 | Murata Mfg Co Ltd | ボイスコイル型リニアアクチュエータ及びこのアクチュエータを用いた装置、並びにこのアクチュエータの製造方法 |
| WO2005101083A1 (ja) * | 2004-04-13 | 2005-10-27 | Matsushita Electric Industrial Co., Ltd. | カメラモジュール |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103560639A (zh) * | 2013-11-20 | 2014-02-05 | 东南大学 | 一种高功率因数直线往复振荡电机 |
| CN106113028A (zh) * | 2016-07-06 | 2016-11-16 | 山东大学 | 一种多驱动三自由度的板簧型微纳操作平台及方法 |
| US11444524B2 (en) | 2018-08-28 | 2022-09-13 | Minebea Mitsumi Inc. | Vibration actuator and electronic equipment |
| JPWO2020045470A1 (ja) * | 2018-08-28 | 2020-09-03 | ミネベアミツミ株式会社 | 振動アクチュエータ及び電子機器 |
| EP3846326A4 (en) * | 2018-08-28 | 2022-05-04 | Minebea Mitsumi Inc. | VIBRATION ACTUATOR AND ELECTRONIC EQUIPMENT |
| US11418099B2 (en) | 2018-08-28 | 2022-08-16 | Minebea Mitsumi Inc. | Vibration actuator and electronic equipment |
| US11515775B2 (en) | 2018-08-28 | 2022-11-29 | Minebea Mitsumi Inc. | Vibration actuator and electronic equipment |
| US11848586B2 (en) | 2018-08-28 | 2023-12-19 | Minebea Mitsumi Inc. | Vibration actuator with plate springs sandwiched between a coil holding part and cases |
| US12003156B2 (en) | 2018-08-28 | 2024-06-04 | Minebea Mitsumi Inc. | Vibration actuator with plate springs including planar, spiral deformation arms |
| US12592624B2 (en) | 2018-08-28 | 2026-03-31 | Minebea Mitsumi Inc. | Vibration actuator with movable body and fixing body having magnetic cylindrical body outside coil with length |
| WO2020060144A1 (ko) * | 2018-09-17 | 2020-03-26 | 엘지전자 주식회사 | 리니어 모터 및 리니어 압축기 |
| US12573932B2 (en) | 2018-09-17 | 2026-03-10 | Lg Electronics Inc. | Linear motor and linear compressor |
| WO2025021886A1 (de) * | 2023-07-27 | 2025-01-30 | Trumpf Schweiz Ag | Einrichtung zur bewegung einer optik und laserbearbeitungsvorrichtung |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014504129A5 (ja) | ||
| US20200227991A1 (en) | Electrical machine | |
| CN102882332A (zh) | 一种横向开关磁阻电机 | |
| JPWO2017061608A1 (ja) | モータ | |
| JP2013215021A (ja) | 電磁誘導装置 | |
| JP5365074B2 (ja) | アキシャルギャップ型回転電機 | |
| JP2009201343A (ja) | 永久磁石回転電機 | |
| JP2012151954A (ja) | リニアモータ | |
| JP2010110128A (ja) | 永久磁石回転電機 | |
| JP2017135766A (ja) | 単相ブラシレスモータおよび単相ブラシレスモータの製造方法 | |
| JP5926017B2 (ja) | 円柱状ボンド磁石 | |
| JP2010158140A (ja) | リニアモータ | |
| JP6426931B2 (ja) | 発電機 | |
| JP2014192942A (ja) | 回転機 | |
| JP5903510B2 (ja) | 回転電気機器 | |
| JP6415029B2 (ja) | 電磁誘導装置 | |
| JP2011182576A (ja) | アキシャルギャップモータ | |
| JP5738609B2 (ja) | 可変界磁型回転電機 | |
| JP6794590B1 (ja) | 回転電機の固定子および回転電機 | |
| JP2022145003A (ja) | リニアモータ | |
| JP5066813B2 (ja) | 回転電機 | |
| JP2018046590A (ja) | 回転電機 | |
| JP2011030411A (ja) | リニアモータ | |
| CN105375727A (zh) | 外转子式发电机 | |
| WO2021024518A1 (ja) | 電機子、回転電機、リニアモータ及び、電機子、回転電機、リニアモータの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140924 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150303 |