JP2012164109A - センシング装置 - Google Patents
センシング装置 Download PDFInfo
- Publication number
- JP2012164109A JP2012164109A JP2011023707A JP2011023707A JP2012164109A JP 2012164109 A JP2012164109 A JP 2012164109A JP 2011023707 A JP2011023707 A JP 2011023707A JP 2011023707 A JP2011023707 A JP 2011023707A JP 2012164109 A JP2012164109 A JP 2012164109A
- Authority
- JP
- Japan
- Prior art keywords
- attribute
- sensor
- unit
- data
- sensor data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Testing And Monitoring For Control Systems (AREA)
Abstract
【解決手段】物理環境を計測するセンサの計測結果を記述したセンサデータを受け取る受信部1311と、前記センサの設置場所の属性を記述した属性データを記憶する記憶部120と、前記計測結果に対応するセンサの設置場所の属性と合致する属性を前記記憶部が記憶している前記属性データから読み出す属性読出部1312と、前記属性読出部が読み出した属性を基準に前記センサデータを分類する属性分類部1313と、前記属性分類部が前記センサデータを分類した結果を出力する出力部1315と、を備えた。
【選択図】図5
Description
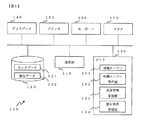
図1は、本発明の実施形態1に係るセンシング装置100の機能ブロック図である。センシング装置100は、センサが物理環境を計測した結果を記述したセンサデータを受け取って蓄積する装置であり、演算部110、記憶部120、メモリ130、ディスプレイ140、プリンタ150、キーボード160、マウス170を備える。また、図示しないネットワークインターフェースを備え、各センサからネットワークを介してセンサデータを受け取ることができる。
(図6:ステップS600)
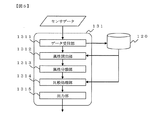
センシング装置100のユーザは、キーボード160などを用いて、センサデータを分類して比較するようにセンシング装置100へ指示する。演算部110は、その指示を受け取り、本処理フローを開始する。センシング装置100は、先に各センサからセンサデータを取得してセンサデータ121として蓄積済みであるものとする。
(図6:ステップS601)
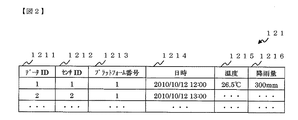
属性読出部1312は、センサデータ121を読み出し、各センサデータのプラットフォーム番号フィールド1213の値をキーにして、属性データ122の対応するレコードを取得する。属性読出部1312は、属性データ122から取得したレコードが記述している属性情報を、当該センサデータの設置場所における属性として認識する。属性読出部1312は、センサデータ121が保持している全てのレコードについて同様の処理を実施し、各センサデータと設置場所の属性を対応付ける。
属性分類部1313は、ステップS601で属性読出部1312が読み出した各センサデータの属性を、センサ異常の判定に適した形態で分類する。本ステップの結果、各センサデータはその属性値が属する分類にしたがって、いずれかの分類に属することになる。分類基準については、例えば以下のような例が考えられる。
(図6:ステップS602:分類例その1)
属性分類部1313は、属性毎に1つの分類を作成してもよいし、複数の属性を組み合わせて1つの分類としてもよい。
(図6:ステップS602:分類例その2)
属性分類部1313は、緯度/経度などのように明確に分類することが難しい属性については、属性値間の類似度を計算し、類似度が高い属性値を有するセンサデータ同士が同じ分類に属するようにしてもよい。具体的には、計算した類似度がある範囲内に収まるセンサデータ同士を同じ分類に属させるようにすればよい。
(図6:ステップS602:分類例その3)
属性分類部1313は、属性値間の距離を計算し、距離が近い属性値を有するセンサデータ同士を同じ分類に属させるようにしてもよい。あるいは、属性値をクラスタリングなどの既知の手法で分類してもよい。
(図6:ステップS602:分類例その4)
属性分類部1313は、必ずしも全ての属性を分類基準として用いる必要はない。例えば、気温センサの設置場所属性を分類する場合は、同様な気象条件を有すると想定される設置場所が同じ分類に属するようにすればよいため、地理的位置、高度、地形情報、気候情報などのいずれかの属性を基準として分類すれば足りる。なお、属性読出部1312が属性データ122から属性を読み出す時点で、分類基準として必要な属性のみを読み出すようにしてもよい。
比較処理部1314は、ステップS602で同じ分類に属することになったセンサデータをユーザが相互に比較することができるような処理を施す。
(図6:ステップS603:補足)
本ステップの目的は、同じ分類に属するセンサデータのうち異常な値を有するものをユーザが識別し易くすることであるため、分類内のセンサデータの傾向を視覚的に把握し、異常値を容易に識別することができるような処理を施すことが望ましい。例えば、同じ分類に属するセンサデータを、取得時刻が揃うように整列して表形式に整えることが考えられる。その他、分類内のデータ平均値と各センサデータの間の差分を求める、各センサデータの経時変化を近似する関数を求める、散布図を作成する、などが考えられる。
(図6:ステップS604)
出力部1315は、ステップS603の処理結果を、ディスプレイ140またはプリンタ150に出力する。
以上のように、本実施形態1に係るセンシング装置100は、計測結果を記述したセンサデータの設置場所の属性を分類し、少なくともその分類結果をディスプレイ140などでユーザに提示する。これにより、ユーザは同じ分類に属するセンサデータ同士を比較することができるので、単一のセンサデータのみでは把握することが難しいセンサ異常であっても、他のセンサデータと比較して異常であるか否かにより、異常の有無を容易に識別することができる。
実施形態1では、比較処理部1314の処理結果をディスプレイ140などでユーザに提示することにより、ユーザがセンサ異常を容易に識別することができるようにした。一方、同一分類に属する他のセンサデータとは明らかに異なる傾向を有するセンサデータを自動的に識別し、異常であると推定することも考えられる。
スペクトルセンサが農作物の画像スペクトルを計測してセンシング装置100に送信しているものと仮定する。同一地域の同一作物であっても、植栽時期により成長段階が異なることがあり、各農作物のスペクトルデータは個々に異なる。特に成長期ではスペクトルデータの差が大きい。そのため、他のセンサデータとは異なるセンサデータがあったとしても、それがセンサの異常であるのか、それとも農作物の成長自体が他と異なっているのかを判断するのは容易でない。この場合、スペクトルデータを時系列に取得し、基準時刻をずらしながら各スペクトルデータ同士が最もよく合致する位置を特定し、その位置を基準として極端に他からずれているスペクトルデータを探せばよい。各スペクトルデータの経時変化が同様であり、ずれが所定範囲内に収まる場合は、一部の農作物の成長段階が他とは異なるに過ぎないと考えられる。ずれが所定範囲内に収まらず極端に大きい場合は、その農作物のスペクトルデータを計測したセンサに異常が生じていると考えられる。
各センサは、設置場所を変更することができるように構成されている移動センサであると仮定する。各センサは、自己の位置情報を含むセンサデータをセンシング装置100に送信する。センシング装置100は、互いに近接している移動センサを同一分類に属するようにしておく。異常検出部1316は、同一分類に属する移動センサからの受信データ量の変動をモニタし、データ量の変化が基準値から大きく異なる場合、その移動センサに異常が生じていると判断する。あるいは、同じ分類に属する移動センサの平均的な移動速度を基準値としておき、いずれかの移動センサの移動速度が基準値から大きく異なる場合は、その移動センサに異常が生じていると判断することもできる。
以上のように、本実施形態2に係るセンシング装置100は、比較処理部1314の処理結果に基づき、同じ分類に属する他のセンサデータの傾向とは異なる傾向を有するセンサデータを異常であると判断し、ユーザにその異常検出結果を提示する。これにより、ユーザは自己の判断のみでは気づかない異常データを識別することができる。
実施形態1〜2では、センシング装置100がセンサデータ121を属性に応じて分類することを説明した。本発明の実施形態3では、センサデータを分類する基準となる属性をユーザが選択する構成例を説明する。その他の構成は実施形態1〜2と同様であるため、以下では差異点を中心に説明する。
以上のように、本実施形態3に係るセンシング装置100は、センサデータを分類する基準となる属性をユーザが指定入力するための属性指定入力部1317を備える。これにより、ユーザは所望する基準でセンサデータを分類することができるので、センシング装置100が実施した分類結果の意義を容易に把握することができる。
実施形態1〜3では、センシング装置100が属性データ122をあらかじめ備えている例を説明した。しかし、必ずしも全てのセンサ設置場所について属性情報が得られない場合も考えられる。そこで本発明の実施形態4では、センサデータを解析してそのセンサ設置場所の属性情報を抽出する構成例を説明する。その他の構成は実施形態1〜3と同様であるため、以下では差異点を中心に説明する。
スペクトルセンサが農作物の画像スペクトルを計測してセンシング装置100に送信しているものと仮定する。属性抽出部1318は、センサデータに含まれている農作物のスペクトルデータを解析し、農作物の種類を推定する。例えば教師付分類による分類手法などを用いて推定すればよい。属性抽出部1318は、農作物が生育している地域の広範画像を取得し、スペクトルデータから算出することができる植生指標を用いるなどして広範囲の植生状況を画像上で把握する。属性抽出部1318は、画素間の繋がり方やスペクトル情報などを教師データと比較することにより、農作物の種類を推定することができる。また、より近接した位置で取得したスペクトル画像であれば、農作物の形状を取得することができるので、テンプレートマッチングなどの手法により形状が合致する農作物種別を特定することもできる。特定した農作物種別は、分類基準として用いることができる。
センサの位置を緯度/経度フィールド1222で管理している場合、同フィールドの値と実際のセンサ位置を合わせておく必要がある。両者の値をユーザが手動で合わせることもできるが、センサデータのなかにセンサの位置情報が含まれている場合は、その位置情報から同フィールドの値を属性情報として抽出することができる。例えば、属性抽出部1318は、センサデータに含まれているセンサIDとプラットフォーム番号をキーにして属性データ122内の対応する緯度/経度フィールド1222の値を取得し、受信したセンサデータ内に含まれている位置情報と緯度/経度フィールド1222の値が異なっている場合、新たな値を用いて同フィールドの値を更新することができる。
以上のように、本実施形態4に係るセンシング装置100は、データ受信部1311が受信したセンサデータからセンサ設置場所の属性情報を抽出し、属性データ122に格納するか、または属性読出部1312に出力する。属性読出部1312は、属性抽出部1318が抽出した属性に合致する属性を属性データ122から読み出す。これにより、あらかじめセンサ設置場所の属性情報を得ることができない場合や、属性が変更された場合でも、実際の設置環境との間で整合を取ることができる。
図10は、本発明の実施形態5に係るセンシング装置100の機能ブロック図である。本実施形態5に係るセンシング装置100において、記憶部120は、実施形態1〜4で説明した構成に加えて新たに作業支援データ123を格納している。
以上のように、本実施形態5に係るセンシング装置100は、センサデータの傾向に対応する作業支援情報を読み出してユーザに提示する。これにより、ユーザはセンサ設置場所の計測結果に応じた適切な対策を速やかに実施することができる。
図11は、本発明の実施形態6に係るセンシング装置100の機能ブロック図である。本実施形態6に係るセンシング装置100は、実施形態1〜5で説明した構成に加え、新たに属性情報作成部135を備える。ここでは図5で説明した構成に加えて属性情報作成部135を備えた例を示した。その他の構成は実施形態1〜5と同様であるため、以下では差異点を中心に説明する。
一般に、地理的に近い位置に設置されている同種のセンサは、同様の計測結果を得ると想定される。ただし、地理的に近くても、標高差や地形などの要因によって気候が異なるため実際には計測結果が異なる場合も考えられる。標高差や地形などの情報は、センサデータから抽出することは困難であるため、外部データソースの情報を用いて提供することが望ましい。属性情報作成部135は、外部データソースからセンサ設置場所の標高データを取得して属性データ122に記録しておく。属性分類部1313は、標高が近い場所で計測したセンサデータが同じ分類に属するようにする。さらに、標高が同じであっても、山の影などで気候が変わる場合があるため、地形から算出した日照条件を属性として追加的に用いるなどの例も考えられる。
属性情報作成部135は、衛星が撮影したスペクトル画像を用いて土地利用状況を抽出し、土地利用状況を属性データ122に記録することもできる。土地利用状況とは、市街地、畑地、裸地、道路など、土地の用途を指すものである。さらには、標高情報と土地利用状況を合わせて属性データ122として用いることもできる。例えば、標高が低い地域の市街地、標高が高い畑作地、などである。
(外部データソースから属性データ122を作成する例:その3)
属性情報作成部135は、過去の気象データを取得し、例えば夏期に高温になる地域と低温になる地域を区別し、属性データ122として用いることもできる。
以上の実施形態1〜6では、センサ設置場所の属性を分類する手法について説明した。その他の分類手法として、以下のようなものが考えられる。
(分類手法の例その1:異種センサ間で補完する)
以上の実施形態1〜6では、原則として同種のセンサの計測結果を同じ分類に属するようにしているが、相関関係がある異種センサを同じ分類に属するようにし、互いに補完的に用いることもできる。例えば、近接した場所に配置されている気温センサと水温センサは同様の傾向で計測結果が変動すると考えられるので、適当な関数を用いて相互に変換することにより、互いの傾向を補完的に把握することができる。その他、高度が上がると気温は下がると考えられるので、高度計の計測結果と気温計の計測結果を補完的に用いることも考えられる。
農作地を広範に衛星撮影し、植生指標などのパラメータを用いて、農作物の生育状態を推定することができる。農作物の生育状態と、気温、季節、気象傾向などの物理環境は、ある程度の相関関係があるので、これらは互いに補完的に用いることができる。同様に、農作物の近接画像から農作物の形状を得ることができるが、農作物の形状は生育状態を表しているので、上記と同様に利用することができる。
Claims (9)
- 物理環境を計測するセンサの計測結果を記述したセンサデータを受け取る受信部と、
前記センサの設置場所の属性を記述した属性データを記憶する記憶部と、
前記計測結果に対応するセンサの設置場所の属性と合致する属性を前記記憶部が記憶している前記属性データから読み出す属性読出部と、
前記属性読出部が読み出した属性を基準に前記センサデータを分類する属性分類部と、
前記属性分類部が前記センサデータを分類した結果を出力する出力部と、
を備えたことを特徴とするセンシング装置。 - 前記属性分類部が分類した結果得られた同一分類内に属する前記センサデータの傾向を算出して相互に比較する比較処理部を備え、
前記出力部は、
前記属性分類部が前記センサデータを分類した結果と併せて、前記比較処理部が前記センサデータの傾向を算出して相互に比較した結果を出力する
ことを特徴とする請求項1記載のセンシング装置。 - 異常な前記センサデータを出力した前記センサを検出する異常検出部を備え、
前記比較処理部は、
前記属性分類部が分類した結果得られた同一分類内に属する前記センサデータのうち同一分類内の他の前記センサデータの傾向に合致しないものを特定し、
前記異常検出部は、
前記比較処理部が前記傾向に合致しないものとして特定した前記センサデータに対応する前記センサに異常が生じているものと判定する
ことを特徴とする請求項2記載のセンシング装置。 - 前記センサは、
設置場所を変更することができるように構成されており、
前記センサデータは、
前記センサの設置場所を記述しており、
前記異常検出部は、
前記センサの設置場所の変化速度が基準値以上であるとき、または同一場所に設定されている前記センサからの通信量の変化が基準値以上であるときは、前記センサに異常が生じているものと判定する
ことを特徴とする請求項3記載のセンシング装置。 - 前記属性分類部は、前記属性読出部が読み出した属性の類似度を算出してその類似度に基づき前記センサデータを分類する
ことを特徴とする請求項1記載のセンシング装置。 - 前記属性分類部が前記センサデータを分類する際に用いる前記属性を指定する属性指定を受け取る属性指定入力部を備えた
ことを特徴とする請求項1記載のセンシング装置。 - 前記センサデータが記述している前記計測結果の特徴を解析して前記計測結果に対応する前記センサの設置場所の属性を取得する属性抽出部を備え、
前記属性読出部は、
前記属性抽出部が抽出した属性と合致する属性を前記記憶部が記憶している前記属性データから読み出す
ことを特徴とする請求項1記載のセンシング装置。 - 前記記憶部は、
前記センサを設置している場所で実施すべき作業内容と、前記センサデータの傾向との対応関係を記述した作業支援データを記憶しており、
前記比較処理部は、
前記傾向に対応する前記作業内容を前記作業支援データから読み出し、
前記出力部は、その作業支援データを出力する
ことを特徴とする請求項2記載のセンシング装置。 - 前記センサの設置場所の属性を外部データソースから取得し、または外部データソースから取得した情報を用いて算出する属性情報作成部を備えた
ことを特徴とする請求項1記載のセンシング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011023707A JP5674499B2 (ja) | 2011-02-07 | 2011-02-07 | センシング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011023707A JP5674499B2 (ja) | 2011-02-07 | 2011-02-07 | センシング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012164109A true JP2012164109A (ja) | 2012-08-30 |
| JP5674499B2 JP5674499B2 (ja) | 2015-02-25 |
Family
ID=46843445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011023707A Expired - Fee Related JP5674499B2 (ja) | 2011-02-07 | 2011-02-07 | センシング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5674499B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016129159A1 (ja) * | 2015-02-13 | 2016-08-18 | ソニー株式会社 | 情報処理システム、情報処理装置、制御方法、および記憶媒体 |
| WO2018123143A1 (ja) * | 2016-12-28 | 2018-07-05 | 三菱日立パワーシステムズ株式会社 | 収集装置、収集方法、プログラム及び収集システム |
| WO2018181041A1 (ja) | 2017-03-29 | 2018-10-04 | 日本電気株式会社 | 圃場管理装置、圃場管理方法、及びコンピュータ読み取り可能な記録媒体 |
| JPWO2017150286A1 (ja) * | 2016-02-29 | 2018-10-25 | 日本電気株式会社 | システム分析装置、システム分析方法、及び、プログラム |
| JP2019079157A (ja) * | 2017-10-23 | 2019-05-23 | 株式会社日立製作所 | 制御システム及び方式 |
| WO2020027207A1 (ja) * | 2018-08-03 | 2020-02-06 | パナソニックIpマネジメント株式会社 | 異常検出方法、情報処理装置及び異常検出システム |
| JPWO2021181469A1 (ja) * | 2020-03-09 | 2021-09-16 | ||
| JP2022041829A (ja) * | 2020-08-31 | 2022-03-11 | 株式会社LAplust | 情報処理装置、情報処理システム、情報処理方法及びプログラム |
| JP2023533624A (ja) * | 2020-07-09 | 2023-08-04 | イッポン・イノベーション | 異常センサを多変量的に特定するためのスーパーバイズなし統計的方法 |
| WO2025206136A1 (ja) * | 2024-03-28 | 2025-10-02 | オムロン株式会社 | 制御装置、情報処理方法および情報処理プログラム |
| WO2026028339A1 (ja) * | 2024-07-31 | 2026-02-05 | Ntt株式会社 | データ判定システム、データ判定方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0496899A (ja) * | 1990-08-15 | 1992-03-30 | Toshiba Corp | プラント監視システム |
| JP2002214185A (ja) * | 2001-01-16 | 2002-07-31 | Nissin Electric Co Ltd | センサ異常の検出方法及び検出装置 |
-
2011
- 2011-02-07 JP JP2011023707A patent/JP5674499B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0496899A (ja) * | 1990-08-15 | 1992-03-30 | Toshiba Corp | プラント監視システム |
| JP2002214185A (ja) * | 2001-01-16 | 2002-07-31 | Nissin Electric Co Ltd | センサ異常の検出方法及び検出装置 |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113139104A (zh) * | 2015-02-13 | 2021-07-20 | 索尼公司 | 信息处理系统和控制方法 |
| CN107209562A (zh) * | 2015-02-13 | 2017-09-26 | 索尼公司 | 信息处理系统、信息处理装置、控制方法和存储媒体 |
| JPWO2016129159A1 (ja) * | 2015-02-13 | 2017-11-24 | ソニー株式会社 | 情報処理システム、情報処理装置、制御方法、および記憶媒体 |
| WO2016129159A1 (ja) * | 2015-02-13 | 2016-08-18 | ソニー株式会社 | 情報処理システム、情報処理装置、制御方法、および記憶媒体 |
| CN113139104B (zh) * | 2015-02-13 | 2023-12-15 | 索尼公司 | 信息处理系统和控制方法 |
| US11615177B2 (en) | 2015-02-13 | 2023-03-28 | Sony Corporation | Information processing system, information processing device, control method, and storage medium |
| US10733282B2 (en) | 2015-02-13 | 2020-08-04 | Sony Corporation | Information processing system, information processing device, control method, and storage medium |
| CN107209562B (zh) * | 2015-02-13 | 2021-04-30 | 索尼公司 | 信息处理系统、信息处理装置、控制方法和存储媒体 |
| JPWO2017150286A1 (ja) * | 2016-02-29 | 2018-10-25 | 日本電気株式会社 | システム分析装置、システム分析方法、及び、プログラム |
| WO2018123143A1 (ja) * | 2016-12-28 | 2018-07-05 | 三菱日立パワーシステムズ株式会社 | 収集装置、収集方法、プログラム及び収集システム |
| JP2018109850A (ja) * | 2016-12-28 | 2018-07-12 | 三菱日立パワーシステムズ株式会社 | 収集装置、収集方法、プログラム及び収集システム |
| WO2018181041A1 (ja) | 2017-03-29 | 2018-10-04 | 日本電気株式会社 | 圃場管理装置、圃場管理方法、及びコンピュータ読み取り可能な記録媒体 |
| US11461884B2 (en) | 2017-03-29 | 2022-10-04 | Nec Corporation | Field management apparatus, field management method, and computer readable recording medium |
| US11435706B2 (en) | 2017-10-23 | 2022-09-06 | Hitachi, Ltd. | Control system and control method |
| JP2019079157A (ja) * | 2017-10-23 | 2019-05-23 | 株式会社日立製作所 | 制御システム及び方式 |
| WO2020027207A1 (ja) * | 2018-08-03 | 2020-02-06 | パナソニックIpマネジメント株式会社 | 異常検出方法、情報処理装置及び異常検出システム |
| JPWO2021181469A1 (ja) * | 2020-03-09 | 2021-09-16 | ||
| JP7303473B2 (ja) | 2020-03-09 | 2023-07-05 | 富士通株式会社 | 処理選択プログラム、処理選択システム、および処理選択方法 |
| JP2023533624A (ja) * | 2020-07-09 | 2023-08-04 | イッポン・イノベーション | 異常センサを多変量的に特定するためのスーパーバイズなし統計的方法 |
| JP7795462B2 (ja) | 2020-07-09 | 2026-01-07 | イッポン・イノベーション | 異常センサを多変量的に特定するためのスーパーバイズなし統計的方法 |
| JP2022041829A (ja) * | 2020-08-31 | 2022-03-11 | 株式会社LAplust | 情報処理装置、情報処理システム、情報処理方法及びプログラム |
| WO2025206136A1 (ja) * | 2024-03-28 | 2025-10-02 | オムロン株式会社 | 制御装置、情報処理方法および情報処理プログラム |
| WO2026028339A1 (ja) * | 2024-07-31 | 2026-02-05 | Ntt株式会社 | データ判定システム、データ判定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5674499B2 (ja) | 2015-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5674499B2 (ja) | センシング装置 | |
| Masoudi et al. | Multi-year comparison of the effects of spatial pattern of urban green spaces on urban land surface temperature | |
| US9104697B2 (en) | Aquatic geographic information system | |
| Browning et al. | Plant phenology: Taking the pulse of rangelands | |
| Schneibel et al. | Evaluating the trade-off between food and timber resulting from the conversion of Miombo forests to agricultural land in Angola using multi-temporal Landsat data | |
| US20150371161A1 (en) | System and methods for identifying, evaluating and predicting land use and agricultural production | |
| EP3193303B1 (en) | System and method for generating a relationship graphs | |
| JP2015000049A (ja) | 収量予測システムおよび収量予測装置 | |
| AU2015394080A1 (en) | Farm field management apparatus, farm field management method, and storage medium | |
| JP6685856B2 (ja) | 農作業計画支援装置及び農作業計画支援方法 | |
| Qian et al. | Mapping regional cropping patterns by using GF-1 WFV sensor data | |
| Hao et al. | Early-season crop mapping using improved artificial immune network (IAIN) and Sentinel data | |
| CN103674998A (zh) | 基于热成像技术的植物健康状态检测方法 | |
| Pan et al. | Discriminating different landuse types by using multitemporal NDXI in a rice planting area | |
| Dong et al. | A phenology-based method for identifying the planting fraction of winter wheat using moderate-resolution satellite data | |
| Ma et al. | Identification of forest disturbance and estimation of forest age in subtropical mountainous areas based on Landsat time series data | |
| Hayashi et al. | Regional forest biomass estimation using ICESat/GLAS spaceborne LiDAR over Borneo | |
| Wang et al. | Improved understorey bamboo cover mapping using a novel hybrid neural network and expert system | |
| WO2014105567A1 (en) | System and method for estimating ages of forests from remotely sensed images | |
| Shinzato et al. | Integrating area-based and individual tree detection approaches for estimating tree volume in plantation inventory using aerial image and airborne laser scanning data | |
| Robson et al. | Developing sugar cane yield prediction algorithms from satellite imagery | |
| Sader et al. | Perspectives of Maine forest cover change from Landsat imagery and Forest Inventory Analysis (FIA) | |
| Kaviani | Estimation of actual evapotranspiration using automatic calibration in PYSEBAL and METRIC algorithms in Qazvin plain | |
| CN120339876B (zh) | 一种基于遥感影像的土地利用变化检测方法及系统 | |
| CN120233052B (zh) | 一种森林碳汇智能化监测系统及其方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130906 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140527 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141222 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5674499 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |