JP2012168096A - 物理量センサ - Google Patents
物理量センサ Download PDFInfo
- Publication number
- JP2012168096A JP2012168096A JP2011030772A JP2011030772A JP2012168096A JP 2012168096 A JP2012168096 A JP 2012168096A JP 2011030772 A JP2011030772 A JP 2011030772A JP 2011030772 A JP2011030772 A JP 2011030772A JP 2012168096 A JP2012168096 A JP 2012168096A
- Authority
- JP
- Japan
- Prior art keywords
- calculation
- value
- cpu
- sampling
- clock
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Indication And Recording Devices For Special Purposes And Tariff Metering Devices (AREA)
Abstract
【解決手段】加速度検出用のセンサ素子10の出力信号を電圧増幅する増幅回路20と、増幅回路20の出力信号を一定期間毎にサンプリングするAD変換器32とを備え、演算器33は、AD変換器32から出力されるサンプリング値をフィルタ処理するためのフィルタ演算を繰り返し実施し、AD変換器32から出力されるサンプリング値に基づいてサンプリング値が規定値以上であると判定したときには、長い周期でフィルタ演算を繰り返し実施し、サンプリング値が規定値未満であるときには、短い周期でフィルタ演算を繰り返し実施する。このためフィルタ演算の回数を減らすことができる。
【選択図】図1
Description
今回のサンプリングのタイミングが下降期間を終えていると下降期間判定手段が判定したときには、演算手段が長い周期でフィルタ演算を繰り返し実施することを特徴とする。
上昇期間判定手段(S310)は、今回のサンプリング値が規定値以上であると判定手段が判定することに先だって、判定手段がサンプリング値が規定値以上であると判定した場合には、今回のサンプリングのタイミングが下降期間を終えているとすることを特徴とする。
今回のサンプリングのタイミングが下降期間を終えていると下降期間判定手段が判定したときには、演算手段が長い周期でフィルタ演算を繰り返し実施することを特徴とする。
上昇期間判定手段(S310)は、今回の差分が規定値以上であると判定手段が判定することに先だって、判定手段が差分が規定値以上であると判定した場合には、今回のサンプリングのタイミングが下降期間を終えているとすることを特徴とする。
比較手段(33a)がサンプリング値が規定値未満であると判定したときには、比較手段は、サンプリング値が規定値未満であると判定した旨を示す判定結果信号をCPUに出力して、CPUがクロック発生手段からCPU自体に与えるクロックの周波数を第2のクロックの周波数に設定するようになっていることを特徴とする。
今回のサンプリングのタイミングが下降期間を終えているとCPUが判定したときには、CPUがクロック発生手段からCPU自体に与えるクロックの周波数を第2のクロックの周波数に設定するようになっていることを特徴とする。
CPUは、サンプリング値が規定値以上であると比較手段が判定した後にサンプリング値が規定値よりも小さいと比較手段が判定した回数が所定回数未満であるか否かを判定することにより、今回のサンプリングのタイミングが下降期間内に入っているか否かを判定することを特徴とする。
CPUは、今回のサンプリング値が規定値以上であると判定することに先だって、サンプリング値が規定値以上であると判定した場合には、今回のサンプリングのタイミングが上昇期間を終えているとすることを特徴とする。
差分が規定値未満であると比較手段が判定したときには、比較手段は、差分が規定値未満であると判定した旨を示す判定結果信号をCPUに出力して、CPUがクロック発生手段からCPU自体に与えるクロックの周波数を第2のクロックの周波数に設定するようになっていることを特徴とする。
CPUは、今回の差分が規定値以上であると判定することに先だって、差分が規定値以上であると判定した場合には、今回のサンプリングのタイミングが上昇期間を終えているとすることを特徴とする。
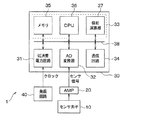
図1に本発明に係る自動車用加速度センサ1の電気回路構成を示す。自動車用加速度センサ1は、センサ素子10、増幅回路20、制御装置30、および発振回路40から構成されている。
+B1・Yn−2+B2・Yn−3・・・・・・(数式1)
ここで、nはであってフィルタ演算の処理の実行回数を示す。AはXに掛けるための係数であり、B0はYn−1に掛けるための係数であり、B1はYn−2に掛けるための係数であり、B2はYn−3に掛けるための係数である。なお、B0、B1、およびB2は、特許請求の範囲に記載のBに相当する。B1、およびB2は、特許請求の範囲に記載のBSに相当し、Yn−2、Yn−3は、特許請求の範囲に記載のYn−Sに相当する。
Yn−2用演算結果バッファには、(n−1)回目のフィルタ演算で用いた演算結果Yn−1に代えて、n回目のフィルタ演算で用いた演算結果Yn−1を記憶させる。Yn−3用演算結果バッファに、(n−1)回目のフィルタ演算で用いたYn−2に代えて、n回目のフィルタ演算で用いたYn−2を記憶させる。
(第2実施形態)
上述の第1実施形態では、サンプリング値Xが規定値未満であるときには、フィルタ演算を長い周期で実施する例について説明したが、これに代えて、本第2実施形態では、サンプリング値Xが規定値未満であるときには、CPU36の動作クロックの周波数を低くする例について説明する。
このため、CPU36自体が第2のCPUクロックの周波数(fcpu/4)を動作周波数とする動作を開始することになる。
上述の第1実施形態では、通常演算時のフィルタ処理の周期の4倍の時間を間引き演算時のフィルタ処理の周期として用いる例を示したが、これに限らず、通常演算時のフィルタ処理の周期よりも間引き演算時のフィルタ処理の周期の方が長いのであれば、間引き演算時のフィルタ処理の周期としてはどのような時間を設定してもよい。
すなわち、ステップS230において今回のサンプリングのタイミングが下降期間内に入っているか否かを判定するために用いる判定回数を1以上の値ならば、3以外の値にしてもよい。
10 センサ素子
20 増幅回路
30 制御装置
30A 制御装置
31 低消費電力回路
32 AD変換器
33 演算器
34 通信回路
35 メモリ
36 CPU
37 積和演算器
31a 分周器
31b クロック切替器
33a 比較器
40 発振回路
Claims (24)
- 被検出対象の物理量を検出するセンサ素子(10)と、
前記センサ素子の出力信号を一定期間毎にサンプリングするAD変換器(32)と、
前記AD変換器から出力されるサンプリング値をフィルタ処理するためのフィルタ演算を繰り返し実施する演算手段(S250)と、
前記AD変換器から出力されるサンプリング値が規定値以上であるか否かを判定する判定手段(S210)と、を備え、
前記サンプリング値が規定値未満であると前記判定手段が判定したときには、前記演算手段が長い周期で前記フィルタ演算を繰り返し実施し、前記サンプリング値が規定値以上であると前記判定手段が判定したときには、前記演算手段が短い周期で前記フィルタ演算を繰り返し実施することを特徴とする物理量センサ。 - 前記AD変換器から出力されるサンプリング値が前記規定値よりも大きな状態から小さい状態に移行する下降期間内に今回の前記サンプリングのタイミングが入っているか否かを判定する下降期間判定手段(S230)を備え、
前記今回のサンプリングのタイミングが前記下降期間に入っていると前記下降期間判定手段が判定したときには、前記演算手段が短い周期で前記フィルタ演算を繰り返し実施し、
前記今回のサンプリングのタイミングが前記下降期間を終えていると前記下降期間判定手段が判定したときには、前記演算手段が長い周期で前記フィルタ演算を繰り返し実施することを特徴とする請求項1に記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記サンプリング値が規定値以上であるか否かを前記判定手段が判定するようになっており、
前記下降期間判定手段(S230)は、前記サンプリング値が規定値以上であると前記判定手段が判定した後に前記サンプリング値が規定値未満であると前記判定手段が判定した回数が所定回数未満であるか否かを判定することにより、前記今回の前記サンプリングのタイミングが前記下降期間内に入っているか否かを判定することを特徴とする請求項2に記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−1)回目の前記フィルタ演算の演算結果をYn−1とし、前記n−1回目の前記フィルタ演算に先だって演算される(n−S)回目の前記フィルタ演算の演算結果をYn−Sとし、
前記サンプリング値をXをとし、前記Xに掛けるための係数をA0とし、前記Yn−1に掛けるための係数をB0とし、Yn−Sに掛けるための係数をBSとしたとき、
前記演算手段は、A0・X、B0・Yn−1、およびBS・Yn−Sを用いて前記Ynを演算するものであり、
前記AD変換器から出力されるサンプリング値が前記規定値よりも小さな状態から大きな状態に移行する上昇期間内に今回の前記サンプリングのタイミングが入っているか否かを判定する上昇期間判定手段(S310)を備え、
前記今回のサンプリングのタイミングが前記上昇期間に入っていると前記上昇期間判定手段が判定したときには、前記演算手段は、前記Yn−Sを前記Yn−1と同一値にして前記Ynを演算することを特徴とする請求項1ないし3のいずれか1つに記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記サンプリング値が規定値以上であるか否かを前記判定手段が判定するようになっており、
前記上昇期間判定手段(S310)は、前記今回のサンプリング値が規定値以上であると前記判定手段が判定することに先だって、前記判定手段が前記サンプリング値が規定値未満であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間内に入っているとし、
前記上昇期間判定手段(S310)は、前記今回のサンプリング値が規定値以上であると前記判定手段が判定することに先だって、前記判定手段が前記サンプリング値が規定値以上であると判定した場合には、前記今回の前記サンプリングのタイミングが前記下降期間を終えているとすることを特徴とする請求項4に記載の物理量センサ。 - 被検出対象の物理量を検出するセンサ素子(10)と、
前記センサ素子の出力信号を一定期間毎にサンプリングするAD変換器(32)と、
前記AD変換器から出力されるサンプリング値をフィルタ処理するフィルタ演算を繰り返し実施する演算手段(S250)と、
前記AD変換器から今回出力されるサンプリング値と前記AD変換器から前回出力されたサンプリング値との差分が規定値以上であるか否かを判定する判定手段(S210)と、を備え、
前記差分が規定値未満であると前記判定手段が判定したときには、前記演算手段が長い周期で前記フィルタ演算を繰り返し実施し、前記差分が規定値以上であると前記判定手段が判定したときには、前記演算手段が短い周期で前記フィルタ演算を繰り返し実施することを特徴とする物理量センサ。 - 前記AD変換器から出力されるサンプリング値に基づいて、前記差分が前記規定値よりも大きな状態から小さい状態に移行する下降期間内に今回の前記サンプリングのタイミングが入っているか否かを判定する下降期間判定手段(S230)を備え、
前記今回のサンプリングのタイミングが前記下降期間に入っていると前記下降期間判定手段が判定したときには、前記演算手段が短い周期で前記フィルタ演算を繰り返し実施し、
前記今回のサンプリングのタイミングが前記下降期間を終えていると前記下降期間判定手段が判定したときには、前記演算手段が長い周期で前記フィルタ演算を繰り返し実施することを特徴とする請求項6に記載の物理量センサ。 - 前記AD変換器が前記センサ素子の出力信号をサンプリングする毎に、前記差分が規定値以上であるか否かを前記判定手段が判定するようになっており、
前記下降期間判定手段(S230)は、前記差分が規定値以上であると前記判定手段が判定した後に前記差分が規定値未満であると前記判定手段が判定した回数が所定回数未満であるか否かを判定することにより、前記今回の前記サンプリングのタイミングが前記下降期間内に入っているか否かを判定することを特徴とする請求項7に記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−1)回目の前記フィルタ演算の演算結果をYn−1とし、前記n−1回目の前記フィルタ演算に先だって演算される(n−S)回目の前記フィルタ演算の演算結果をYn−Sとし、
前記サンプリング値をXとし、前記Xに掛けるための係数をA0とし、前記Yn−1に掛けるための係数をB0とし、Yn−Sに掛けるための係数をBSとしたとき、
前記演算手段は、A0・X、B0・Yn−1、およびBS・Yn−Sを用いて前記Ynを演算するものであり、
前記差分が前記規定値よりも小さな状態から大きな状態に移行する上昇期間内に今回の前記サンプリングのタイミングが入っているか否かを判定する上昇期間判定手段(S310)を備え、
前記今回のサンプリングのタイミングが前記上昇期間に入っていると前記上昇期間判定手段が判定したときには、前記演算手段は、前記Yn−Sを前記Yn−1と同一値にして前記Ynを演算することを特徴とする請求項6ないし8のいずれか1つに記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記差分が規定値以上であるか否かを前記判定手段が判定するようになっており、
前記上昇期間判定手段(S310)は、前記差分が規定値以上であると前記判定手段が判定することに先だって、前記判定手段が前記差分が規定値未満であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間内に入っているとし、
前記上昇期間判定手段(S310)は、前記今回の前記差分が規定値以上であると前記判定手段が判定することに先だって、前記判定手段が前記差分が規定値以上であると判定した場合には、前記今回の前記サンプリングのタイミングが前記下降期間を終えているとすることを特徴とする請求項9に記載の物理量センサ。 - 前記AD変換器(32)が前記サンプリングを実施する毎に前記演算手段が前記フィルタ演算を実施することにより、前記演算手段が短い周期で前記フィルタ演算を実施するようになっており、
前記AD変換器(32)が複数回、前記サンプリングを実施する毎に前記演算手段が1回の前記フィルタ演算を実施することにより、前記演算手段が長い周期で前記フィルタ演算を実施することを特徴とする請求項1ないし10のいずれか1つに記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−d)回目の前記フィルタ演算の演算結果をYn−dとし、
前記サンプリング値をXとし、前記Xに掛けるための係数をA0とし、Yn−dに掛けるための係数をBとしたとき、
前記演算手段は、A0・X、およびB・Yn−dを用いて前記Ynを演算するものであり、
前記演算手段が長い周期で前記フィルタ演算を実施するときと、前記演算手段が短い周期で前記フィルタ演算を実施するときとでは、前記フィルタ演算のフィルタ特性が同一になるように前記演算手段が前記フィルタ演算で用いる前記係数としてのA0およびBを切り替えるようになっていることを特徴とする請求項1ないし3、6ないし8のいずれか1つに記載の物理量センサ。 - 被検出対象の物理量を検出するセンサ素子(10)と、
前記センサ素子の出力信号を一定期間毎にサンプリングするAD変換器(32)と、
第1のクロックとこの第1のクロックよりも低い周波数を有する第2のクロックとのうちいずれか一方のクロックを出力するクロック発生手段(31b)と、
前記AD変換器から出力されるサンプリング値が規定値以上であるか否かを判定する比較手段(33a)と、
前記クロック発生手段から出力されるクロックを動作クロックとして動作し、かつ前記AD変換器から出力されるサンプリング値をフィルタ処理するためのフィルタ演算を繰り返し実施するCPU(36)と、を備え、
前記比較手段(33a)が前記サンプリング値が規定値以上であると判定したときに、前記比較手段は、前記クロック発生手段から前記CPUに与えるクロックの周波数を前記第1のクロックの周波数に設定するようになっており、
前記比較手段(33a)が前記サンプリング値が規定値未満であると判定したときには、前記比較手段は、前記サンプリング値が規定値未満であると判定した旨を示す判定結果信号を前記CPUに出力して、前記CPUが前記クロック発生手段から前記CPU自体に与えるクロックの周波数を前記第2のクロックの周波数に設定するようになっていることを特徴とする物理量センサ。 - 前記CPUは、前記AD変換器から出力されるサンプリング値が前記規定値よりも大きい状態から小さい状態に移行する下降期間内に今回の前記サンプリングのタイミングが入っているか否かを判定するものであり、
前記今回のサンプリングのタイミングが前記下降期間に入っていると前記CPUが判定したときには、前記クロック発生手段から前記CPUに与えられるクロックの周波数を前記第1のクロックの周波数に維持するようになっており、
前記今回のサンプリングのタイミングが前記下降期間を終えていると前記CPUが判定したときには、前記CPUが前記クロック発生手段から前記CPU自体に与えるクロックの周波数を前記第2のクロックの周波数に設定するようになっていることを特徴とする請求項13に記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記サンプリング値が規定値以上であるか否かを前記比較手段が判定するようになっており、
前記CPUは、前記サンプリング値が規定値以上であると前記比較手段が判定した後に前記サンプリング値が規定値よりも小さいと前記比較手段が判定した回数が所定回数未満であるか否かを判定することにより、前記今回の前記サンプリングのタイミングが前記下降期間内に入っているか否かを判定することを特徴とする請求項14に記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−1)回目の前記フィルタ演算の演算結果をYn−1とし、前記n−1回目の前記フィルタ演算に先だって演算される(n−S)回目の前記フィルタ演算の演算結果をYn−Sとし、
前記サンプリング値をXとし、前記Xに掛けるための係数をA0とし、前記Yn−1に掛けるための係数をB0とし、Yn−Sに掛けるための係数をBSとしたとき、
前記CPUは、A0・X、B0・Yn−1、およびBS・Yn−Sを用いて前記Ynを演算するものであり、
前記CPUは、前記AD変換器から出力されるサンプリング値が前記規定値よりも小さい状態から大きい状態に移行する上昇期間内に今回の前記サンプリングのタイミングが入っているか否かを判定するものであり、
前記今回のサンプリングのタイミングが前記上昇期間に入っていると前記CPUが判定したときには、前記CPUは、前記Yn−Sを前記Yn−1と同一値にして前記Ynを演算することを特徴とする請求項13ないし15のいずれか1つに記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記サンプリング値が規定値以上であるか否かを前記比較手段が判定するようになっており、
前記CPUは、前記今回のサンプリング値が規定値以上であると判定することに先だって、前記サンプリング値が規定値未満であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間内に入っているとし、
前記CPUは、前記今回のサンプリング値が規定値以上であると判定することに先だって、前記サンプリング値が規定値以上であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間を終えているとすることを特徴とする請求項16に記載の物理量センサ。 - 被検出対象の物理量を検出するセンサ素子(10)と、
前記センサ素子の出力信号を一定期間毎にサンプリングするAD変換器(32)と、
第1のクロックとこの第1のクロックよりも低い周波数を有する第2のクロックとのうちいずれか一方のクロックを出力するクロック発生手段(31b)と、
前記AD変換器から今回出力されるサンプリング値と前記AD変換器から前回出力されたサンプリング値との差分が規定値以上であるか否かを判定する比較手段(33a)と、
前記クロック発生手段から出力されるクロックを動作クロックとして動作し、かつ前記AD変換器から出力されるサンプリング値をフィルタ処理するためのフィルタ演算を繰り返し実施するCPU(36)とを備え、
前記比較手段が前記差分が規定値以上であると判定したときに、前記比較手段は、前記クロック発生手段から前記CPUに与えるクロックの周波数を前記第1のクロックの周波数に設定するようになっており、
前記差分が規定値未満であると前記比較手段が判定したときには、前記比較手段は、前記差分が規定値未満であると判定した旨を示す判定結果信号を前記CPUに出力して、前記CPUが前記クロック発生手段から前記CPU自体に与えるクロックの周波数を前記第2のクロックの周波数に設定するようになっていることを特徴とする物理量センサ。 - 前記CPUは、前記AD変換器から出力されるサンプリング値に基づいて、前記差分が前記規定値よりも大きい状態から小さい状態に移行する下降期間内に今回の前記サンプリングのタイミングが入っているか否かを判定するものであり、
前記今回のサンプリングのタイミングが前記下降期間に入っていると前記CPUが判定したときには、前記クロック発生手段から前記CPUに与えるクロックの周波数が前記第1のクロックの周波数に維持されるようになっており、
前記今回のサンプリングのタイミングが前記下降期間を終えていると前記下降期間判定手段が判定したときには、前記CPUが前記クロック発生手段から前記CPU自体に与えるクロックの周波数を前記第2のクロックの周波数に設定するようになっていることを特徴とする請求項18に記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記差分と規定値とを前記比較手段が判定するようになっており、
前記CPUは、前記差分が規定値以上であると前記比較手段が判定した後に前記差分が規定値未満であると前記比較手段が判定した回数が所定回数未満であるか否かを判定することにより、前記差分が前記規定値よりも大きな状態から小さい状態に移行する下降期間内に今回の前記サンプリングのタイミングが入っているか否かを判定するようになっていることを特徴とする請求項19に記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−1)回目の前記フィルタ演算の演算結果をYn−1とし、前記n−1回目の前記フィルタ演算に先だって演算される(n−S)回目の前記フィルタ演算の演算結果をYn−Sとし、
前記サンプリング値をXとし、前記Xに掛けるための係数をA0とし、前記Yn−1に掛けるための係数をB0とし、Yn−Sに掛けるための係数をBSとしたとき、
前記CPUは、A0・X、B0・Yn−1、およびBS・Yn−Sを用いて前記Ynを演算するものであり、
前記CPUは、前記差分が前記規定値よりも小さい状態から大きい状態に移行する上昇期間内に今回の前記サンプリングのタイミングが入っているか否かを判定するものであり、
前記今回のサンプリングのタイミングが前記上昇期間に入っていると前記CPUが判定したときには、前記CPUは、前記Yn−Sを前記Yn−1と同一値にして前記Ynを演算することを特徴とする請求項18ないし20のいずれか1つに記載の物理量センサ。 - 前記AD変換器が前記サンプリングを実施する毎に、前記差分が規定値以上であるか否かを前記比較手段が判定するようになっており、
前記CPUは、前記差分が規定値以上であると判定することに先だって、前記差分が規定値未満であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間内に入っているとし、
前記CPUは、前記今回の前記差分が規定値以上であると判定することに先だって、前記差分が規定値以上であると判定した場合には、前記今回の前記サンプリングのタイミングが前記上昇期間を終えているとすることを特徴とする請求項21に記載の物理量センサ。 - n回目の前記フィルタ演算の演算結果をYnとし、前記n回目の前記フィルタ演算に先だって演算される(n−d)回目の前記フィルタ演算の演算結果をYn−dとし、
前記サンプリング値をXとし、前記Xに掛けるための係数をA0とし、Yn−dに掛けるための係数をBとしたとき、
前記CPUは、A0・X、およびB・Yn−dを用いて前記Ynを演算するものであり、
前記クロック発生手段から前記CPUに与えられるクロックの周波数が前記第1のクロックの周波数に設定されているときと、前記クロック発生手段から前記CPUに与えられるクロックの周波数が前記第2のクロックの周波数に設定されているときとで、前記フィルタ演算のフィルタ特性が同一になるように前記CPUが前記フィルタ演算で用いる係数としてのA0およびBを切り替えるようになっていることを特徴とする請求項13ないし15、18ないし20のうちいずれか1つに記載の物理量センサ。 - 前記クロック発生手段によって前記CPUの動作クロックの周波数が前記第2のクロックの周波数に設定されているときには、前記CPUが1回の前記フィルタ演算を複数に分散化して実施することを特徴とする請求項13ないし123のいずれか1つに記載の物理量センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011030772A JP5397393B2 (ja) | 2011-02-16 | 2011-02-16 | 物理量センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011030772A JP5397393B2 (ja) | 2011-02-16 | 2011-02-16 | 物理量センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012168096A true JP2012168096A (ja) | 2012-09-06 |
| JP5397393B2 JP5397393B2 (ja) | 2014-01-22 |
Family
ID=46972395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011030772A Expired - Fee Related JP5397393B2 (ja) | 2011-02-16 | 2011-02-16 | 物理量センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5397393B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150301074A1 (en) * | 2014-04-17 | 2015-10-22 | Seiko Epson Corporation | Physical quantity detecting circuit, physical quantity detection device, physical quantity measurement system, electronic apparatus, moving object, and physical quantity measurement data generation method |
| WO2024014413A1 (ja) * | 2022-07-15 | 2024-01-18 | 日産自動車株式会社 | 電子制御装置及び電子制御方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03162620A (ja) * | 1989-11-21 | 1991-07-12 | Fujitsu Ltd | 被測定物の特性補正方式 |
| JPH07333045A (ja) * | 1994-06-13 | 1995-12-22 | Ishida Co Ltd | 計量装置 |
-
2011
- 2011-02-16 JP JP2011030772A patent/JP5397393B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03162620A (ja) * | 1989-11-21 | 1991-07-12 | Fujitsu Ltd | 被測定物の特性補正方式 |
| JPH07333045A (ja) * | 1994-06-13 | 1995-12-22 | Ishida Co Ltd | 計量装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150301074A1 (en) * | 2014-04-17 | 2015-10-22 | Seiko Epson Corporation | Physical quantity detecting circuit, physical quantity detection device, physical quantity measurement system, electronic apparatus, moving object, and physical quantity measurement data generation method |
| CN105004885A (zh) * | 2014-04-17 | 2015-10-28 | 精工爱普生株式会社 | 检测用电路及装置、计测系统、设备、移动体和数据生成方法 |
| WO2024014413A1 (ja) * | 2022-07-15 | 2024-01-18 | 日産自動車株式会社 | 電子制御装置及び電子制御方法 |
| JPWO2024014413A1 (ja) * | 2022-07-15 | 2024-01-18 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5397393B2 (ja) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3598179B1 (en) | Seismic sensor and earthquake determination method | |
| JP5093261B2 (ja) | 同期信号検出装置 | |
| JPH04358945A (ja) | 車両用乗員保護装置の起動装置 | |
| JP5397393B2 (ja) | 物理量センサ | |
| CN102792167B (zh) | 速度检测装置 | |
| JP5812774B2 (ja) | 半導体装置 | |
| EP1143264B1 (en) | GPS receiver having DR sensor signal sampling function | |
| CN104764468B (zh) | 转换速率检测电路 | |
| CN105043386B (zh) | 光纤陀螺类盲发变滤波滑窗长度的异步通信数据传输方法 | |
| JP2014002105A (ja) | 物理量測定装置、物理量測定方法 | |
| JP2011171974A (ja) | 巡回型a/d変換器 | |
| US20230228786A1 (en) | Inertial measurement device and inertial measurement system | |
| JP2020527763A5 (ja) | ||
| JP2019020756A (ja) | センサ信号処理装置 | |
| JP4908249B2 (ja) | 車速パルス信号発生装置、その制御方法及びプログラム | |
| JP2011147009A (ja) | デジタルフィルタおよびデジタルフィルタリング方法 | |
| JP5423573B2 (ja) | 信号処理装置 | |
| JP2011232144A5 (ja) | ||
| JP4686420B2 (ja) | サンプリングデータ平均化回路 | |
| JP2006135436A (ja) | アナログ/デジタル変換方法及びアナログ/デジタル変換回路 | |
| JP2009168757A (ja) | 移動停止判定装置、移動停止判定方法、及び移動停止判定プログラム | |
| JP2017110955A (ja) | 液位推定装置 | |
| JP6787105B2 (ja) | デジタルフィルター、レシプロカルカウント値生成回路および物理量センサー | |
| US9898193B2 (en) | Application-specific integrated circuit and measurement transmitter having such a circuit | |
| JPH02287114A (ja) | パルス時間計測用データ平均処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130723 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131007 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5397393 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |