JP2012170532A - ゴルフクラブ及びボールの挙動の計測方法 - Google Patents
ゴルフクラブ及びボールの挙動の計測方法 Download PDFInfo
- Publication number
- JP2012170532A JP2012170532A JP2011033169A JP2011033169A JP2012170532A JP 2012170532 A JP2012170532 A JP 2012170532A JP 2011033169 A JP2011033169 A JP 2011033169A JP 2011033169 A JP2011033169 A JP 2011033169A JP 2012170532 A JP2012170532 A JP 2012170532A
- Authority
- JP
- Japan
- Prior art keywords
- ball
- camera
- behavior
- head
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images











Landscapes
- Golf Clubs (AREA)
Abstract
【課題】ゴルフクラブのヘッドとボールとの挙動の関係を高精度に計測する方法の提供。
【解決手段】ゴルフクラブ5のヘッド2とボール6との挙動との計測方法では、インパクト時前の2時点においてフェース面の3個以上のマークの2次元データを得るステップと、2次元データから2時点のマークの3次元位置を特定するステップと、2時点の各マークの3次元位置からフェース面の挙動を特定するステップと、フェース面の挙動とボール6との位置関係を時系列に更新することにより、フェース面とボール6との接触時点を特定するステップと、フェース面とボール6との接触時点のヘッド2の挙動を推定するステップと、2時点においてボール6の2次元データを得るステップと、2時点のボール6の2次元データから2時点のボール6の3次元位置姿勢を特定するステップと、ボール6の3次元位置姿勢からボール6の挙動値を推定するステップとを含む。
【選択図】図1
【解決手段】ゴルフクラブ5のヘッド2とボール6との挙動との計測方法では、インパクト時前の2時点においてフェース面の3個以上のマークの2次元データを得るステップと、2次元データから2時点のマークの3次元位置を特定するステップと、2時点の各マークの3次元位置からフェース面の挙動を特定するステップと、フェース面の挙動とボール6との位置関係を時系列に更新することにより、フェース面とボール6との接触時点を特定するステップと、フェース面とボール6との接触時点のヘッド2の挙動を推定するステップと、2時点においてボール6の2次元データを得るステップと、2時点のボール6の2次元データから2時点のボール6の3次元位置姿勢を特定するステップと、ボール6の3次元位置姿勢からボール6の挙動値を推定するステップとを含む。
【選択図】図1
Description
本発明は、ゴルファーがスイングするゴルフクラブの挙動と、打撃されたボールの挙動とを計測する方法及びそのシステムに関する。
ゴルフクラブの挙動及びボールの挙動の計測は、スイングの確認及び改善、ゴルファーに適合するゴルフクラブのフィッテイング、ゴルフクラブ及びゴルフボール(以下、単にボールという)の設計開発等に役立つ。このため、この様な計測システムは、練習場、販売店、製造メーカー等で用いられている。先行技術文献には、ゴルフクラブの挙動やボールの挙動を計測するための様々なシステムが開示されている。
ボールの挙動の計測システムとして、特許第2950450号公報では、2台のカメラで打撃直後のボールを撮影している。撮影で得られた位置情報を3次元座標に変換して、ボールの挙動を計測する。特開2001−264016号公報には、移動するボールを一つの映像フレーム内の画像として構成し、ボールの挙動を計測するシステムが開示されている。特許第4109075号公報では、仮想座標情報と撮影されたボールの位置及び姿勢情報とが一致するように、仮想球体の位置及び姿勢を変位させて、ボールの位置及び姿勢を特定する計測方法が開示されている。特開2005−291824号公報では、時刻の異なるボールの第一画像情報と第二画像情報とが求めている。この第一画像情報と第二画像情報とが仮想球体上の表面に写像されて、この2つの画像情報の相関関係からボールの挙動を計測する方法が開示されている。
これらの計測システムでは、ボールの挙動が計測されているが、ゴルフクラブの挙動が計測されていない。ボールの挙動と、このボールに対応するゴルフクラブの挙動とが把握されていない。
本発明の目的は、ゴルフクラブの挙動とボールの挙動との関係を高精度に計測する方法及びそのシステムの提供にある。
本発明に係るゴルフクラブのヘッドとボールとの挙動の計測方法は、
ゴルフクラブのヘッドのフェース面に少なくとも3個のマークを付するステップと、
少なくとも3台のクラブカメラが、インパクト時前の2時点において同時に撮影するステップと、
このインパクト時前の2時点において同時に撮影した画像信号からマークの複数の2次元データを得るステップと、
この2時点のマークの2次元データから2時点のマークの3次元位置を特定するステップと、
この2時点の各マークの3次元位置からフェース面の挙動を特定するステップと、
このフェース面の挙動とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定するステップと、
このフェース面とボールとの接触時点のヘッドの挙動を推定するステップと、
少なくとも2台のボールカメラが、打撃されたボールを2時点において同時に撮影するステップと、
この打撃されたボールを2時点において同時に撮影した画像信号からボールの複数の2次元データを得るステップと、
この2時点のボールの2次元データから2時点のボールの3次元位置姿勢を特定するステップと、
この2時点のボールの3次元位置姿勢からボールの挙動値を推定するステップとを含む。
ゴルフクラブのヘッドのフェース面に少なくとも3個のマークを付するステップと、
少なくとも3台のクラブカメラが、インパクト時前の2時点において同時に撮影するステップと、
このインパクト時前の2時点において同時に撮影した画像信号からマークの複数の2次元データを得るステップと、
この2時点のマークの2次元データから2時点のマークの3次元位置を特定するステップと、
この2時点の各マークの3次元位置からフェース面の挙動を特定するステップと、
このフェース面の挙動とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定するステップと、
このフェース面とボールとの接触時点のヘッドの挙動を推定するステップと、
少なくとも2台のボールカメラが、打撃されたボールを2時点において同時に撮影するステップと、
この打撃されたボールを2時点において同時に撮影した画像信号からボールの複数の2次元データを得るステップと、
この2時点のボールの2次元データから2時点のボールの3次元位置姿勢を特定するステップと、
この2時点のボールの3次元位置姿勢からボールの挙動値を推定するステップとを含む。
好ましくは、この挙動計測方法では、上記ゴルフクラブは、ウッド系ゴルフクラブである。この挙動計測方法は、このウッド系ゴルフクラブのヘッドのクラウンに帯状のマークを付するステップを更に含んでいる。
上記2時点における帯状マークの位置データから上記2時点間の帯状マークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。
上記2時点における帯状マークの位置データから上記2時点間の帯状マークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。
好ましくは、この挙動計測方法では、上記ゴルフクラブは、アイアン系ゴルフクラブである。この挙動計測方法は、このアイアン系ゴルフクラブのヘッドのトップに離間した2個のマークを付するステップを更に含んでいる。
上記2時点における2個のマークの位置データから上記2時点間の2個のマークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。
上記2時点における2個のマークの位置データから上記2時点間の2個のマークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。
好ましくは、この挙動計測方法では、上記ヘッドの挙動値は、ヘッド速度、打点、フェース角又は動ロフトである。上記ボールの挙動値は、ボール速度、振れ角、打ち出し角、バックスピン及びサイドスピンである。
本発明に係るゴルフクラブのヘッドとボールとの挙動の計測システムは、ゴルフクラブのヘッドの挙動を連続撮影する上クラブカメラと、右クラブカメラ及び左クラブカメラと、ゴルフボールの挙動を連続撮影する上ボールカメラと、横ボールカメラと、情報処理装置とを備えている。
この上クラブカメラは、打撃されるボールの上方に配置されている。右クラブカメラと左クラブカメラとは、前方左右に離間して配置されている。この上ボールカメラは、打撃されるボールの上方に配置されている。横ボールカメラは、打撃されるボールの左右いずれかの側に位置されている。このクラブカメラは、同期させられて連続撮影可能にされている。このボールカメラは、同期させられて連続撮影可能にされている。この情報処理装置は、連続撮影されたクラブの画像データからヘッドの挙動を特定する。この情報処理装置は、このヘッドの挙動からヘッドのフェース面とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定する。この接触時点のヘッドの挙動値と打撃されたボールの挙動値とを計測する。
この上クラブカメラは、打撃されるボールの上方に配置されている。右クラブカメラと左クラブカメラとは、前方左右に離間して配置されている。この上ボールカメラは、打撃されるボールの上方に配置されている。横ボールカメラは、打撃されるボールの左右いずれかの側に位置されている。このクラブカメラは、同期させられて連続撮影可能にされている。このボールカメラは、同期させられて連続撮影可能にされている。この情報処理装置は、連続撮影されたクラブの画像データからヘッドの挙動を特定する。この情報処理装置は、このヘッドの挙動からヘッドのフェース面とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定する。この接触時点のヘッドの挙動値と打撃されたボールの挙動値とを計測する。
好ましくは、この計測システムでは、上ボールカメラの光軸と横ボールカメラの光軸とがなす角度は、80°以上100°以下である。この右カメラ及び左カメラの各光軸が、XYZの3次元直交座標系のXZ平面において、水平線に対して30°以上60°以下の角度をなしている。この左カメラの光軸は、XY平面において、X軸に対して0°以上35°以下の角度をなしている。この右カメラの光軸は、XY平面において、X軸に対してマイナス35°以上0°以下の角度をなしている。この左右のカメラの光軸同士が、XY平面において、20°以上90°以下の角度をなしている。この上カメラの光軸が、ゴルフボールの中心を通る鉛直線に対して80°以上100°以下の角度をなしている。
本発明に係るゴルフクラブのヘッド及びボールの測定方法は、ヘッドのフェース面とボールとの接触時(インパクト時)のクラブ挙動値が推定されている。この計測方法では、インパクト時のクラブ挙動値に対応するボール挙動値が求められている。
以下、適宜図面が参照されつつ、好ましい実施形態に基づいて本発明が詳細に説明される。
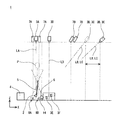
図1及び図2は、本発明の一実施形態として、計測システム1が示されている。この計測システム1は、複数のカメラ3、コンピュータ4及びゴルフクラブ5を備えている。カメラ3は高速で連続撮影が可能な高速度カメラである。この計測システム1において、ゴルファーPの前後方向をY軸方向、Y軸方向に垂直で且つ鉛直の方向をZ軸方向、YZ両軸に垂直な、ボール打撃方向(ボール飛行方向)をX軸方向とする。このXYZの各軸から3次元座標が構成される。この3次元座標の原点は、定位置に載置されたボール6の中心点に設定される。例えば、ボール6はティー14に載置される。この3次元座標において、ヘッド2の位置及び姿勢が特定される。
この挙動の計測方法では、ゴルフクラブ5のヘッド2及びボール6の挙動が計測される。この計測システム1により、ゴルファーPにスイングされるゴルフクラブ5の挙動と、このゴルフクラブ5に打撃されるボール6の挙動とが計測される。この計測では、スイング中のヘッド2の3次元座標が時系列的に測定される。この3次元座標で、ゴルフクラブ5のヘッド2上の三箇所以上のポイントが測定される。
このゴルフクラブ5の3次元座標の計測には、DLT(Direct Linear Transformation)法と呼ばれる方法が用いられるのが好ましい。このDLT法は、例えば、特許第2950450号公報に記載されている。DLT法は、バイオメカニクスの分野においても一般的に用いられている。
DLT法は、異なる方向から見た複数の画像を用いて3次元座標を得る方法である。すなわち、対象物の異なる方向からの複数の2次元座標の位置データの総当たり的な組み合わせから、一つの3次元座標の位置データを得る方法である。上記複数の2次元座標の位置データは、同一時点で得られたもの(同時に撮影されたもの)である必要がある。このDLT法は、カメラ3の配置に関する制約が少なく、汎用性が高い。また、DLT法は、実空間におけるカメラ3の位置、光軸の方向、レンズの焦点距離等のカメラ定数に関する情報が不要とされ得る利点を有する。DLT法では、3次元座標中の既知の点、すなわち、実空間での座標値が知られている点(コントロールポイント)の画像に基づいて3次元座標が再構築される。コントロールポイントの設定は、通常は、位置関係が定量的に設定された6個以上のマークが形成されたリファレンスフレーム(キャリブレーションフレーム)が用いられる。
図1及び図2には示されていないが、ヘッド2の所定箇所にマークが取り付けられる。マークの取付部位については後述される。このマークの挙動が計測される。このマークの3次元座標が前述のDLT法により計測される。ヘッド2の挙動は、マークの挙動の計測結果に基づいて分析される。
複数のカメラ3は、コンピュータ4に接続されている。コンピュータ4は、図示されない制御部を有する。この制御部は、複数のカメラ3を同期して撮影可能に制御する。コンピュータ4は、解析プログラムが記憶された記憶部と、演算部とを備える。典型的な記憶部は、ハードディスクである。典型的な演算部は、CPUである。
複数のカメラ3は、互いに異なる位置に設置されている。本実施形態では、3台のクラブカメラ3A、3B及び3Cと3台のボールカメラ3D、3E及び3Fとが用いられている。3台のクラブカメラのうち、1台のカメラ(第一カメラと呼ぶ)3Aは、インパクト直前のヘッド2の挙動を撮影することができるように、ボール載置位置のほぼ真上に設置されている。他の2台のクラブカメラ(第二カメラ及び第三カメラと呼ぶ)3B、3Cは、フェース面を撮影することができるように、飛球線方向に設置されている。3台のクラブカメラ3A、3B及び3Cは同期してシャッターが切られる。
具体的には、以下の通りである。第一カメラ3Aは、本発明の上クラブカメラとして、原点(ボール6の中心)を通るX軸上の原点からやや後方の位置の上方に設置されている。本実施形態では、原点から80mm後方の位置の上方4000mmの位置(X=−80mm、Y=0、Z=4000mm)に設置されている。
第二カメラ3Bは、本発明の右クラブカメラとして、原点を通るX軸上の原点から4000mm前方の位置の、Y軸プラス方向に1250mmの位置の、上方4000mmの位置(X=4000mm、Y=1250mm、Z=4000mm)に設置されている。第三カメラ3Cは、本発明の左クラブカメラとして、原点を通るX軸上の原点から4000mm前方の位置の、Y軸マイナス方向に1250mmの位置の、上方4000mmの位置(X=4000mm、Y=−1250mm、Z=4000mm)に設置されている。第二カメラ3B及び第三カメラ3Cはそれぞれ、X軸方向に1000mmの範囲で移動可能にされている。すなわち、2台のカメラ3B、3Cはそれぞれ、原点から3000〜4000mmの範囲で位置調節可能にされている。
上記第二カメラ3B及び第三カメラ3Cは、その光軸同士が互いに直交する配置が、DLT法の数値解法で得られる解の精度が高くなるので好ましい。光軸同士の交差角が大きくなると、撮影対象であるヘッド2のフェース面と光軸とのなす角度が小さくなり、複数のマークの映像が近接し、識別されにくくなる。この観点から、第二カメラ3Bの光軸LBと第三カメラ3Cの光軸LCとがXY平面でなす角度は、60°以下が好ましい。逆に、光軸同士の交差角が小さくなると、DLT法の数値解法で得られる分析の精度が低くなる。この観点から、この光軸のなす角度は、20°以上が好ましい。
この分析の精度の観点から、第二カメラ3B及び第三カメラ3Cは、それぞれの光軸LB及び光軸LCの方向が、好ましくは、ボール6の載置位置から地面(床面)に対してXZ平面で30°以上60°以下の範囲の角度をなして設置される。また、第二カメラ3Bの光軸LBの方向は、好ましくは、XY平面(平面視)でX軸に対して0°以上35°(Y軸のプラス方向)以下の範囲の角度をなしている。好ましくは、第三カメラ3Cの光軸LCの方向は、平面視でX軸に対して0°以上マイナス35°(Y軸のマイナス方向)以上の範囲の角度をなしている。
クラブカメラの数は3台には限定されない。4台以上のカメラ3が用いられてもよい。第二カメラ3B及び第三カメラ3Cのそれぞれは、ヘッド2の少なくともフェース面を撮影できるように設置されている。第一カメラ3Aは、ヘッド2の少なくともトップ部(ウッド系クラブヘッドのクラウン部又はアイアン系クラブヘッドのトップ部)を撮影できるように設置されている。
この計測システム1では、X軸方向に第一カメラ3Aを挟んで、前後それぞれに第一ストロボ7Aが取り付けられている。例えば、第一ストロボ7Aは、X=−30mm及び−130mmのそれぞれ、Y=0、Z=4000mmの各位置に取り付けられている。また、X=2000mm、Y=0、Z=4000mmの位置に第二ストロボ7Bが取り付けられている。第一ストロボ7Aは、鉛直方向下向きに照射する。第二ストロボ7Bは、ボール6からX軸方向後方に約130mmまでの範囲を照射する。これらストロボ7は、カメラ3の作動と同期して照射する。
ボール6の後方には、第一カメラ3A、第二カメラ3B及び第三カメラ3Cとストロボ7A及び7Bとの作動のタイミングを決定するトリガー装置が設置されている。このトリガー装置は、2台の光センサ8A、8Bから構成されている。光センサ8A、8Bは、ヘッド2の移動経路であるX軸を挟んで対向配置された検出光照射器9A、9Bと、検出光を受光し得る受光器10A、10Bとを有している。第一光センサ8AはX=−130mmの位置にあり、第二光センサ8BはX=−30mmの位置にある。スイングされたゴルフクラブ5のヘッド2が検出光を遮蔽したとき、受光器10A、10Bがこれを検知する。各受光器10A、10Bによる遮蔽検知により、それぞれの検知時点が基準時点となる。この基準時点に基づいてストロボ7及びカメラ3が作動する。
図3及び図4には、ヘッド2におけるマークの形成位置が示されている。図3にはウッド系クラブのヘッド2Wが示されている。図3(a)はヘッド2Wの平面図であり、図3(b)はヘッド2Wの正面図である。フェース面12Wに4つのマークMA、MB、MC、MDが形成されている。これらのマークとして、全てプリズムタイプの反射マークが採用されている。フェース面12WにはフェースセンタFOが設定されている。フェースセンタFOを通ってフェース面12W上を上下方向に延びる縦仮想直線をYw軸とする。Yw軸に対して垂直にフェースセンタFOを通ってフェース面12W上をトウヒール方向に延びる横仮想直線をXw軸とする。4つのマークMA、MB、MC、MDは、フェース面12W上の長方形の四頂点A、B、C、Dに位置している。2辺AC、BDはYw軸に平行であり、2辺AB、CDはXw軸に平行である。仮想直線ADと仮想直線BCとの交点がフェースセンタFOとなる。
このフェースセンタFOは、後述する位置データの取得のために妥当と思われる任意の位置に設定することが可能である。例えば以下の通りである。第一には、フェース面12Wの幅と高さとからフェースセンタFOが特定され得る。第二には、フェース面12Wの面積重心がフェースセンタFOとして設定され得る。第三には、ヘッド2W全体の重心位置とフェース面12Wとの位置関係からフェースセンタFOが特定され得る。
一例として、フェース面12Wの幅と高さとからフェースセンタFOを設定する方法が以下に説明される。まず、ヘッド2Wが、所定のリアルロフト角(フェース角が0)及びライ角となるように水平面に設置される。すなわち、ゴルフクラブ5が上記姿勢に固定される。この姿勢におけるヘッド2Wのフェース面12Wの最トウ側点(フェース最トウ側点)が特定され、最ヒール側点(フェース最ヒール側点)が特定される。フェース最トウ側点とフェース最ヒール側点との水平方向離間距離がフェース幅として特定される。フェース幅の中央点を通り、水平面に垂直で且つその中央位置でフェース面12Wに垂直な面(垂直面)が特定される。この垂直面とフェース面12Wとのフェース面上の交線が特定される(縦ライン)。フェース面上のこの縦ラインの最上側点(フェース最上側点)が特定される。次いで、フェース面上の縦ラインの最下側点(フェース最下側点)が特定される。フェース最上側点とフェース最下側点とを結ぶ仮想直線の中央点がフェースセンタFOと設定される。このフェースセンタFOの設定方法は一例である。
ウッド系のヘッド2Wには、そのクラウン部の頂部(トップ部)13Wに帯状のマークMEが形成されている。図3(a)に示されるように、トップ部13Wは、クラウン部の上面におけるフェース面12Wに近接した部位である。帯状のマークMEは、トップ部13W上をトウヒール方向に延在している。この帯状マークMEは、前述した第一カメラ3Aによって容易に撮影され得る位置に形成されている。
図4にはサンドウェッジと呼ばれるロフト角の大きいアイアン系クラブのヘッド2Aが示されている。図4(a)はヘッド2Aの平面図であり、図4(b)はヘッド2Aの正面図である。フェース面12Aに3つのマークMA、MB、MCが形成されている。
これらのマークMA、MB、MCには、ガラスビーズタイプの反射テープが反射マークとして採用されている。ロフト角が小さいゴルフクラブの場合は、反射マークによって反射された光が撮影されにくいので、プリズムタイプの反射マークを用いるのが好ましい。一方、ロフト角が大きいゴルフクラブの場合は、反射マークによって反射された光が撮影されやすいので、とくにプリズムタイプの反射マークを用いる必要がない。従って、ロフト角が大きいゴルフクラブの場合は、より低コストのガラスビーズタイプの反射テープ等を用いるのが好ましい。具体的には、プリズムタイプの反射マークは、ロフト角が25°以下のゴルフクラブにとって好ましい。ロフト角が20°以下のゴルフクラブにとってはさらに好ましい。ロフト角が15°以下のクラブにとっては特に好ましい。一方、コスト削減の観点から、ガラスビーズタイプの反射テープ等は、ロフト角が16°以上のクラブにとって好ましい。ロフト角が21°以上のクラブにとってはさらに好ましい。ロフト角が26°以上のクラブにとっては特に好ましい。
これらのマークMA、MB、MCの全てが、フェース面12Aのブラスト処理された中央側部分に形成されている。トウヒール方向両端側では、フェース面12A自体が反射しやすいため、マークの識別が難しくなる可能性があるからである。フェース面12AにはフェースセンタFOが設定されている。上記ウッド系のヘッド2Wにおけると同様にして、横仮想直線であるXa軸及び縦仮想直線であるYa軸が設定される。3つのマークMA、MB、MCは、フェース面12A上の直角三角形の三頂点A、B、Cに位置している。底辺ABはXa軸に一致している。フェースセンタFOは底辺ABの中点である。辺ACはYa軸に平行である。
アイアン系クラブのヘッド2AのフェースセンタFOも、前述した各種の設定方法によって設定され得る。また、以下の方法によっても設定され得る。まず、ゴルフクラブ5ごとに予め決まっているライ角となるように、対象のゴルフクラブ5の姿勢が固定される。フェース面のフェース材(例えば、図4(b)におけるACを通る直線と、Bを通り且つ上記AC線と平行な線とに囲まれた範囲)の幅方向中央点が特定され、この中央点を通る鉛直線(中央縦ライン)が特定される。フェース材上の中央縦ラインの最上側点(フェース最上側点)が特定される。次いで、フェース材上の中央縦ラインの最下側点(フェース最下側点)が特定される。フェース最上側点とフェース最下側点とを結ぶ仮想直線の中央点がフェースセンタと設定される。このフェースセンタ設定方法は一例である。
アイアン系のヘッド2Aには、そのトップ部13Aに2つのマークMF、MGが形成されている。図4(a)に示されるように、トップ部13Aは、クラウン部の上面におけるフェース面12Aに近接した部位である。上記2つのマークMF、MGは、トップ部13A上をトウヒール方向に互いに離間して形成されている。この2つのマークMF、MGは、前述した第一カメラ3Aによって容易に撮影され得る位置に形成されている。
本実施形態においては、ウッド系のヘッド2Wのフェース面12Wには4つのマークが形成されているが、4つには限定されない。3つでもよく、5つ以上でもよい。アイアン系のヘッド2Aのフェース面12Aには3つのマークが形成されているが、3つには限定されない。4つ以上でもよい。フェース面12上のマークは面を構成し得る少なくとも3つの位置に必要である。すなわち、一直線上の配置ではない少なくとも3つのマークが必要である。これは、ヘッド2のフェース面12を特定する必要があるからである。
各マークMA、MB、MC、MDの位置も、上記実施形態におけるものには限定されない。フェース面12上のマークのうちのいずれか一のマーク(第一のマーク)が、上記Ya軸及びYw軸(以下、Ya軸で代表させる)よりトウ側に配置され、他のいずれか一のマーク(第二のマーク)が、Ya軸よりヒール側に配置され、さらに他のいずれか一のマーク(第三のマーク)が、上記第一及び第二のマークのうちの一方のマーク(基準マークという)の上方又は下方に配置され、この基準マークと第三のマークとを結ぶ仮想直線と、第一のマークと第二のマークとを結ぶ仮想直線とは、85°以上95°以下の角度をなしているのが好ましい。最も好ましい角度は90°である。基準マークとしては、本実施形態では、図3(b)及び図4(b)におけるマークMAが該当する。このような第一、第二、第三のマークが、以下の(ア)から(オ)のうちの少なくとも一つの要件を満たしているのがさらに好ましい。
(ア) 上記基準マークは、Ya軸よりトウ側に配置されるのが好ましい。一般的にフェース面12はヒール側よりトウ側の方が広いため、複数のマークを広く分散配置することができるからである。その結果、隣接するマークが共にボール6に隠れてしまう事態が回避される。
(イ) 上記第一のマーク及び第二のマークは、それらを結ぶ仮想直線がYa軸によって2等分されるように配置されるのが好ましい。フェースセンタFOが容易に計算されうるからである。さらに、ボール6がフェース面12の中央付近に衝突したとき、マークがボール6に隠れてしまう事態が回避されうるからである。
(ウ) 上記第一のマーク及び第二のマークは、それらを結ぶ仮想直線がYa軸と直交するように配置されているのが好ましい。3次元座標が2次元座標に変換された際に、「打点」がフェースセンタFOからの上下左右の各方向の距離によって定義されうるからである。その結果、フェース面12のどの部位にボール6が衝突したかがイメージされやすい。
(エ) 上記第一のマークと第二のマークとの離間距離(両マークを結ぶ仮想直線の実長さ。以下同じ)は、40mm以上が好ましく、45mm以上がさらに好ましい。隣接するマークが共にボール6に隠れてしまう事態が回避されうるからである。この離間距離は、フェース面12の大きさの範囲内で設定されるが、通常、80mm以下、さらには70mm以下に設定されうる。本実施形態では、上記離間距離は、ウッド系クラブヘッド2W及びアイアン系クラブヘッド2Aともに60mmにされている。
(オ) 上記基準マークと第三のマークとの離間距離は、22mm以上が好ましく、24mm以上がさらに好ましい。隣接するマークが共にボール6に隠れてしまう事態が回避されうるからである。この離間距離は、フェース面12の大きさの範囲内で設定されるが、通常、50mm以下、さらには40mm以下に設定されうる。本実施形態では、上記離間距離は、ウッド系クラブヘッド2Wでは30mm、アイアン系クラブヘッド2Aでは25mmにされている。
以上に説明された計測システム1により、DLT法が用いられて、ヘッド2の位置、姿勢等の3次元データが時系列で得られる。得られた上記3次元データに基づいて、フェース面12とボール6との3次元座標上の位置関係が時系列に更新され、フェース面12とボール6との接触する時点(インパクト時)が特定される。最終的に、インパクト時のヘッド2の挙動が推定される。上記挙動とは、例えば、ヘッド2の動ロフト、フェース角(開き角)、ブロー角、進入角、打点等である。
図1及び図2に示されるように、複数のカメラ3のうち、1台のボールカメラ(第四カメラと呼ぶ)3Dは、本発明の上ボールカメラとして、X軸方向に原点(ボール6の中心)からやや前方の位置の上方に設置されている。この計測システム1では、原点から195mm前方の位置の上方4000mmの位置(X=195mm、Y=0、Z=4000mm)に設置されている。
他の1台のボールカメラ(第五カメラと呼ぶ)3Eは、本発明の横ボールカメラとしての第一ボールカメラである。残りの1台のボールカメラ(第六カメラと呼ぶ)3Fは、本発明の横ボールカメラとしての第二横ボールカメラである。この第五カメラ3E及び第六カメラ3Fは、前後方向に第4カメラ3Dとほぼ同じ位置にあり、第4カメラ3Dの下方の位置に配置されている。第五カメラ3E及び第六カメラ3Fは、ボール6とほぼ同じ高さに配置されている。ここでは、第五カメラ3Eより第六カメラ3FがZ軸方向上方の位置に配置されている。
第五カメラ3E及び第六カメラ3Fそれぞれは、ボール6の少なくとも側方から見た表面を撮影できるように設置されている。第四カメラ3Dは、ボール6の少なくとも上方から見た表面を撮影できるように設置されている。ボール6の3次元位置の計測精度が高くなるため、第四カメラ3Dと第五カメラ3E及び第六カメラ3Fとは、その光軸同士が互いに直交するように配置されることが好ましい。
第四カメラ3Dと第五カメラ3Eは同期してシャッターが切られる。第四カメラ3D及び第六カメラ3Fは同期してシャッターが切られる。ここでは、第四カメラ3Dから第六カメラ3Fの3台を例示するが、3台に限定されない。4台以上のカメラ3が用いられてもよい。
X軸方向に第五カメラ3Eを挟んで、前後それぞれに第三ストロボ7Cが取り付けられている。X軸方向に第六カメラ3Fを挟んで、前後それぞれに第四ストロボ7Dが取り付けられている。第三ストロボ7C及び第四ストロボ7DはY軸方向に照射する。この第三ストロボ7Cは、第五カメラ3Eの作動と同期して照射する。第四ストロボ7Dは、第六カメラ3Fの作動と同期して照射する。
前述のトリガー装置(光センサ8A、8B)の検知に基づいて、基準時点が決定される。この基準時点に基づく一の所定の時点で、第三ストロボ7Cは、第四カメラ3Dと第五カメラ3Eとの撮影に対応して作動する。基準時点に基づく他の所定の時点で、第四ストロボ7Dは、第四カメラ3Dと第六カメラ3Fとの撮影に対応して作動する。
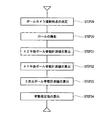
図5のフローチャート、図6から図9を参照しつつ、インパクト時におけるヘッド2の挙動の推定の一例を説明する。図5において、前述した第一カメラ3Aから第三カメラ3Cまでの3台のカメラ3によってインパクト直前のヘッド2が同時に撮影される(STEP1)。この撮影は、例えば2つの時点のそれぞれにおいて行われる。次いで、撮影された画像から、フェース面12の複数のマークの位置が、画像処理によって抽出される(STEP2)。上記複数のマークとは、ウッド系クラブヘッドでは4個のマーク、アイアン系クラブヘッドでは3個のマークを意味している。しかし、ウッド系クラブヘッドについても、3個のマークが採用されてもよい。
3台のカメラ3のいずれの撮影画像においても、各マークの位置が抽出された場合(STEP3)、各位置は、3台計測用の補正式(DLT法において規定される)によって3次元座標に変換される(STEP4)。3台のうちの2台のカメラ3の撮影画像においてのみ、各マークの位置が抽出された場合(STEP5)、各位置は、その2台計測用の補正式(DLT法において規定される)によって3次元座標に変換される(STEP6)。例えば、第二カメラ3B及び第三カメラ3Cの2台のみが使用された場合(STEP5)、各位置は、第二カメラ3B及び第三カメラ3Cの2台計測用の補正式(DLT法において規定される)によって3次元座標に変換される(STEP6)。
このDLT法において規定される補正式は、コンピュータに記憶されている。3台計測用の補正式は、第一カメラ3A、第二カメラ3B及び第3カメラ3Cで撮影されたコントロールポイントの画像に基づいて予め求められている。第一カメラ3A及び第二カメラ3Bの2台計測用の補正式は、第一カメラ3A及び第二カメラ3Bで撮影されたコントロールポイントの画像に基づいて予め求められている。第一カメラ3A及び第三カメラ3Cの2台計測用の補正式は、第一カメラ3A及び第三カメラ3Cで撮影されたコントロールポイントの画像に基づいて予め求められている。第二カメラ3B及び第三カメラ3Cの2台計測用の補正式は、第二カメラ3B及び第三カメラ3Cで撮影されたコントロールポイントの画像に基づいて予め求められている。この(STEP1)から(STEP6)の2次元座標から3次元座標への変換は公知のDLT法によってなされるため、詳細な説明は省略される。
2時点のそれぞれにおけるフェース面上の3つ以上のマークの3次元位置情報が取得できたか否かが判定される(STEP7)。上記3つ以上の3次元位置情報が取得できた場合には、後述されるように2時点のフェース面12の位置から、インパクト時のフェース面12の位置が推定され、フェース面12とボール6との接触点の3次元座標上の位置が計算される(STEP8)。この(STEP8)においては、フェース面12とボール6との3次元座標上の位置関係が時系列に更新されることにより、フェース面12とボール6との接触時点を特定され、接触点が推定される。
2時点のいずれか一方において3つ以上のマークの3次元位置情報が取得できているが、他方においては上記一方において取得されたマークの位置情報より少ない個数の位置情報しか得られていない場合には(STEP9)、他方において取得されなかったマークの3次元座標位置が推定される(STEP10)。具体的には、ウッド系ゴルフクラブのヘッド2Wのフェース面12Wに形成された4つのマークについて、最初の時点においては4つのマークの3次元位置情報が取得できたが、後の時点においては2つのマークがボール6の陰になって撮影されず、その3次元位置情報が取得できなかった場合である(STEP9)。この場合には、トップ部13Wの帯状マークMEの2次元の回転角に基づいて、後の時点において取得できなかった2つのマークの3次元位置情報が推定される(STEP10)。この推定方法については後述される。2時点のフェース面12の位置から、インパクト時のフェース面12の位置が推定され、フェース面12とボール6との接触点の3次元座標上の位置が計算される(STEP8)。
算出されたフェース面12とボール6との接触点の3次元座標が、2次元座標であるフェース面12の座標に変換され、インパクト時のヘッド2の挙動が推定される(STEP11)。
図6及び図7を参照しつつ、以下に、上記(STEP8)におけるフェース面12とボール6との接触点の3次元座標上の位置の計算について説明される。図6に示されように、例示されたヘッド2のフェース面12には3つのマークが形成されている。マークの位置はA(t)、B(t)、C(t)の各点で示される。前述した2時点のうちの最初の時点をt=0とし、後の時点をt=1とする。上記接触点の3次元座標位置の計算の基本的な考え方は、上記3つの点A(t)、B(t)、C(t)が等速直線運動をしていると仮定し、3つの点A(t)、B(t)、C(t)によって構成される面がボール6と接触する時点を求め、その時点での上記位置A(t)、B(t)、C(t)及び上記接触点(打点Q)の各座標を求めることである。上記3次元座標の原点(0、0、0)は、図6に示されるボール6の中心点である。
t時点における点A、B、Cの座標位置がA(t)、B(t)、C(t)とされる。t=0とt=1との時間間隔がTとされる。この時間Tは遮光時間間隔の計測値である。遮光時間間隔とは、ヘッド2が、図2に示される第一光センサ8Aの検出光を遮蔽してから、第二光センサ8Bの検出光を遮蔽するまでの時間間隔である。以上から、上記座標位置A(t)、B(t)、C(t)は下記の式(1)で表される。
A(t)= A(1)+(A(1)−A(0))/T×δt
B(t)= B(1)+(B(1)−B(0))/T×δt (1)
C(t)= C(1)+(C(1)−C(0))/T×δt
A(t)= A(1)+(A(1)−A(0))/T×δt
B(t)= B(1)+(B(1)−B(0))/T×δt (1)
C(t)= C(1)+(C(1)−C(0))/T×δt
この式において、δtは計算時間間隔である。δtの初期値は例えば100μs(マイクロ秒)に設定され、終了値が例えば300μsに設定され、増加ステップが例えば1μsに設定される。ボール6の半径が例えばrに設定される。
図7のフローチャートにおいて、上記式(1)によって座標位置A(t)、B(t)、C(t)が計算される(STEP21)。時刻tにおけるABベクトル及びACベクトルが計算される。そして、上記両ベクトルの外積N(Nx、Ny、Nz)が計算される(STEP22)。このベクトルの外積Nは法線ベクトルとなる。この法線ベクトルは単位ベクトルである。この法線ベクトルはフェース面12に垂直なベクトル(フェース面ベクトル)である。
このA(t)、B(t)、C(t)と、法線ベクトルNとを用いて、下記の式(2)により、ボール6の中心(0、0、0)とフェース面12との最短距離rrが計算される(STEP23)。
rr = −Nx×A(t)x−Ny×A(t)y−Nz×A(t)z (2)
rr = −Nx×A(t)x−Ny×A(t)y−Nz×A(t)z (2)
上記最短距離rrが、ボール6の半径r以下になったか否かが判定される(STEP24)。半径r以下になったとき、その時点のδtがインパクト時のδtであると決定され、インパクト時の座標位置A(t)、B(t)、C(t)が決定される(STEP25)。次いで、インパクト時の3次元座標上の打点Q(Qx、Qy、Qz)が下記の式(3)によって決定される(STEP26)。
Qx = −Nx×r
Qy = −Ny×r (3)
Qz = −Nz×r
Qx = −Nx×r
Qy = −Ny×r (3)
Qz = −Nz×r
上記(STEP24)において、上記最短距離rrがボール6の半径r以下にならない間、及び、δtが300μsにならない間は、δtがδt+1μsに置き換えられて(STEP28)、上記(STEP21)から(STEP24)が繰り返される。以上の演算によって求められた打点Q(Qx、Qy、Qz)は3次元座標上の位置である。
このインパクト時の座標位置A(t)、B(t)、C(t)からインパクト時のフェース面12の位置及び姿勢が特定される。打点Q(Qx、Qy、Qz)からインパクト時のフェース面12とボール6との相対位置が特定される。
インパクト時のフェース面12の位置及び姿勢と、打点Q(Qx、Qy、Qz)とから、インパクト時のヘッド2の挙動値の推定がされる。このクラブ挙動の推定値としては、例えば、ヘッド速度、動ロフト角、フェース角、ブロー角、進入角等が挙げられる。具体的なクラブ挙動の推定値の計算方法は公知であり、その説明は省略される。この計測システム1を用いたヘッド2の挙動計測方法により、インパクト直前及びインパクト時のヘッド2の挙動が計測され、推定される。
[未取得位置の推定]
次に、図5中のSTEP9及びSTEP10における、いずれかの時点で取得されなかったマークの位置の推定について、以下に説明される。
次に、図5中のSTEP9及びSTEP10における、いずれかの時点で取得されなかったマークの位置の推定について、以下に説明される。
図8には、t=0及びt=1の2時点におけるウッド系ゴルフクラブのヘッド2Wのフェース面12Wが示されている。t=0においては、4つのマークの位置A、B、C、Dが全て抽出された。t=1においては、トウ側の2つのマークがボール6の陰に隠れたために撮影されず、この2つの位置A’、C’が抽出されなかった。ヒール側の2つの位置B’、D’は抽出された。図8には、抽出されなかった位置A’、C’は白地で示されている。トップ部13Wに形成された帯状マークMEは、第一カメラ3A(図1及び図2参照)によってほぼ確実に撮影され得る。帯状マークMEの長手方向の端部位置はそれぞれE点及びF点とされる。
上記2位置A’、C’の推定の基本的な考え方は、t=0におけるDCベクトル(DCx0、DCy0、DCz0)及びBAベクトル(BAx0、BAy0、BAz0)を用いて、t=1におけるD’C’ベクトル(DCx1、DCy1、DCz1)及びB’A’ベクトル(BAx1、BAy1、BAz1)を求めることである。その際、帯状マークMEの端部位置のFEベクトルの、t=0からt=1への回転角度が用いられる。
第一に、t=0におけるFEベクトル(FEx0、FEy0、FEz0)及びt=1におけるF’E’ベクトル(FEx1、FEy1、FEz1)が求められる。ここで、

である。なお、数式中に示されるベクトルには、その上部に矢印→を付してベクトルである旨を表している。
である。なお、数式中に示されるベクトルには、その上部に矢印→を付してベクトルである旨を表している。
第二に、t=0におけるFEベクトルと、t=1におけるF’E’ベクトルとの外積ベクトルV(Vx、Vy、Vz)が求められる。ここで、Vx、Vy、Vzはそれぞれ、下記の式(4)、式(5)、式(6)によって求められる。なお、sqrt は、( )内の平方根を示す。
第三に、t=0におけるFEベクトルと、t=1におけるF’E’ベクトルとのなす角度φが、下記の式(7)によって求められる。なお、 acos は、アークコサインを意味する。
第四に、t=0からt=1への帯状マークMEの回転行列(線分FEの回転行列)Mtが、下記の式(8)によって求められる。
第五に、t=0におけるDCベクトル(DCx0、DCy0、DCz0)及びBAベクトル(BAx0、BAy0、BAz0)が求められる。ここで、
である。
である。
上記DCベクトル及びBAベクトルのそれぞれに上記回転行列Mtが乗ぜられる。その結果、t=1における推定されたD’C’ベクトル及びB’A’ベクトルが求められる。下記の式(9)及び式(10)の通りである。
取得することができた位置B’に、上記B’A’ベクトルを加えることにより、未取得であった位置A’(t=1におけるマークMAの位置)が推定される。また、取得することができた位置D’に、上記D’C’ベクトルを加えることにより、未取得であった位置C’(t=1におけるマークMCの位置)が推定される。これらの推定値を用いることにより、図5中のSTEP8以降の演算が実行され得る。その結果、t=0及びt=1の両時点において3つ以上の位置が抽出し得た場合と同様に、インパクト直前及びインパクト時におけるヘッド2の挙動を推定することができる。
図9に示されるヘッド2Wでは、t=0においては、4つのマークの位置A、B、C、Dが全て抽出された。t=1においては、ヒール側の2つのマークがボール6の陰に隠れたために撮影されず、この2つの位置B’、D’が抽出されなかった。この場合でも、未取得の位置B’、D’を推定するために、図8を参照しつつ説明された手法と同様の手法が用いられる。同様の説明は省略されるが、図9に示される例については、ベクトルの向きが、図8におけるのとは逆になる。すなわち、t=0におけるCDベクトル(CDx0、CDy0、CDz0)及びABベクトル(ABx0、ABy0、ABz0)を用いて、t=1におけるC’D’ベクトル(CDx1、CDy1、CDz1)及びA’B’ベクトル(ABx1、ABy1、ABz1)が求められる。その際、帯状マークMEの端部位置のベクトルEFの、t=0からt=1への回転角度が用いられる。
いずれかの時点で取得されなかったマークの位置の推定について、ウッド系ゴルフクラブのヘッド2Wを例に説明がされたが、アイアン系ゴルフクラブのヘッド2Aにおいても同様に推定される。図4のヘッド2Aにおいて、フェース面12AのマークMA、MB及びMCのうちの1つの位置がいずれかの時点で取得されていなくとも、その位置が推定され得る。
図10のフローチャート及び図11から図14を参照しつつ、ボール6の挙動の計測方法の一例を説明する。第四から第六の3台のカメラ3D、3E及び3Fによりボール6が撮影される時点t=2とt=3とが決定される(STEP29)。この時点t=2及びt=3は、例えば、光センサ8A及び8Bがゴルフクラブ5(ヘッド2)を検出した時刻に基づいて所定の時刻を設定している。
第四カメラ3D、第五カメラ3E及び第六カメラ3Fによって、打撃された直後のボール6が撮影される(STEP30)。例えば、時点t=2及びt=3の2つの時点のそれぞれにおいて撮影される。時点t=2で、第四カメラ3Dと第五カメラ3Eとが同期して撮影する。時点t=3で、第四カメラ3Dと第六カメラ3Fとが同期して撮影する。
撮影された複数の2次元データから、XZ平面におけるボール6の挙動の計測値が求められる(STEP31)。具体的には、バックスピン量と、サイドスピン量と、XZ平面における打ち出し角と、XZ平面におけるボール6のの移動距離とが例示される。撮影された複数の2次元データから、XY平面におけるボール6の挙動の計測値が求められる(STEP32)。具体的には、振れ角と移動距離とが例示される。
XZ平面におけるボール6の挙動の計測値とXY平面におけるボール6の挙動の計測値とから3次元座標におけるボール6の挙動の計測値が求められる(STEP33)。具体的には、打ち出し角とボール速度とが例示される。
ボール6の挙動の計測値は、予め記憶された補正式によりボール6の挙動の推定値が算出される(STEP34)。この補正式は、予め求められており、コンピュータ4に記憶されている。
この補正式は、ボール6の挙動の計測値Mmとし、その推定値Msとすると、以下の式(11)で求められる。
Ms = An ・ Mm + Bn (11)
Ms = An ・ Mm + Bn (11)
ここで、係数Anは、補正係数である。切片Bnは、補正切片である。この補正係数An及び補正切片Bnは、ボール6の挙動の実測値Mrとその計測値Mmとの関係から求められる。補正式は、計測値Mmが与えられたときに、推定値Msが実測値Mrに近似されるように定められている。
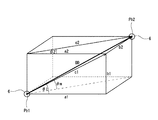
具体的には、例えば、Pb1及びPb2の位置が任意に定められる。このPb1及びPb2の位置にボール6が例えば治具を用いて支持される。そのボール6の位置姿勢から、ボール6の挙動の実測値Mrが求められる。このPb1の位置に支持されたボール6が、第四カメラ3D及び第五カメラ3Eで撮影される。同様にして、Pb2の位置に支持されたボール6が、第四カメラ3D及び第六カメラ3Fで撮影される。この撮影により、そのボール6の位置姿勢から、ボール6の挙動の計測値Mmが求められる。
この点Pb1及び点Pb2が変更されて、複数のボール6の挙動の実測値Mrと、この実測値Mrに対応した計測値Mmとが求められる。この実測値Mrと計測値Mmとの関係から一次近似式が求められる。この一次近似式が前述の補正式である。
図11から図14を参照しつつ、以下に、上記(STEP31)から(STEP34)における、ボール6の挙動値の計算について説明される。ボール6の挙動値として打ち出し角を例に説明がされる。
まず、図11(a)及び図11(b)を参照しつつ、ボール6の中心位置の算出方法が説明される。この算出方法では、ボール6の輪郭から中心位置、点Pb1及び点Pb2が計算される。図11(a)は、点Pb1におけるボール6の2次元データのイメージを示している。図11(b)は、点Pb2におけるボール6の2次元データのイメージを示している。
図11(a)の点G(Xg、Zg)及び点H(Xh、Zh)は、ボール6の輪郭のX軸に平行な接線とZ軸に平行な接線との交点である。点G(Xg、Zg)と点H(Xh、Zh)とは、点Pb1(Xp1、Zp1)を中心に対称に位置している。点Pb1(Xp1、Zp1)は、点G(Xg、Zg)及び点H(Xh、Zh)から下記の式(12)で求められる。
Xp1=(Xg+Xh)/2 (12)
Zp1=(Zg+Zh)/2
Xp1=(Xg+Xh)/2 (12)
Zp1=(Zg+Zh)/2
点G(Xg、Zg)及び点H(Xh、Zh)と同様にして、点Pb2(Xp2、Zp2)は、図11(b)の点J(Xj、Zj)及び点K(Xk、Zk)から、下記の式(132)で求められる。
Xp2=(Xj+Xk)/2 (13)
Zp2=(Zj+Zk)/2
Xp2=(Xj+Xk)/2 (13)
Zp2=(Zj+Zk)/2
図12(a)は、XZ平面において、点Pb1と点Pb2とに位置するボール6の2次元データのイメージを示している。この図12(a)の位置関係から、移動距離a1、b1及びc1が計算される。XZ平面における打ち出し角θ1が計算される。
図12(b)は、XY平面において、点Pb1と点Pb2とに位置するボール6の2次元データのイメージを示している。この図12(b)の位置関係から、移動距離a2、b2及びc2が計算される。XY平面における振れ角θ2が計算される。
図13には、3次元座標上の点Pb1に位置するボール6と、点Pb2に位置するボール6とのイメージが示されている。この3次元座標上の点Pb1と点Pb2は、XZ平面上の位置とXY平面上の位置とから得られている。
図13の角度θmは、このボール6の打ち出し角の計測値を示している。この計測打ち出し角θmは、角度θ1と計測振れ角θ2とから下記の式(14)で求められる。なお、atanはアークタンジェントを意味する。
θm = atan( tanθ1 ・ cosθ2 ) (14)
θm = atan( tanθ1 ・ cosθ2 ) (14)
この打ち出し角の計測値θmに打ち出し角の補正式が適用される。打ち出し角の推定値θsが下記の式(15)で求められる。
θs = A1 ・ θm + B1 (15)
ここで、A1は、打ち出し角の補正係数であり、B1は、打ち出し角の補正切片である。
θs = A1 ・ θm + B1 (15)
ここで、A1は、打ち出し角の補正係数であり、B1は、打ち出し角の補正切片である。
次に、ボール速度の算出方法説明がされる。図13のDDは、点Pb1から点Pb2までの移動距離を示している。この移動距離DDは、前述の(STEP31)、(STEP32)及び(STEP33)から、下記の式(16)で求められる。
DD = c2 / cosθm (16)
DD = c2 / cosθm (16)
点Pb1の撮影時点t=2と、点Pb2の撮影時点t=3との時間間隔T2が計算される。このボール速度の計測値Vmは下記の式(17)で求められる。
Vm = DD / T2 (17)
Vm = DD / T2 (17)
このボール速度の計測値Vmからボール速度の推定値Vsが以下の式(18)で求められる。
Vs = A2 ・ Vm + B2 (18)
A2はボール速度の補正係数であり、B2はボール速度の補正切片である。
Vs = A2 ・ Vm + B2 (18)
A2はボール速度の補正係数であり、B2はボール速度の補正切片である。
次に、振れ角の算出方法説明がされる。図12(b)を示して前述したように、振れ角θ2が求められる。ここでは、振れ角の計測値θuは、振れ角θ2として求められる。この例では、振れ角の計測値θuはXY平面に2次元データから求められている。この計測値θuは、(STEP32)で得られており、(STEP31)及び(STEP32)を経ずに得られている。
この振れ角の計測値θuから振れ角の推定値θtが下記の式(19)で求められる。
θt = A3 ・ θu + B3 (19)
A3は振れ角の補正係数であり、B3は振れ角の補正切片である。
θt = A3 ・ θu + B3 (19)
A3は振れ角の補正係数であり、B3は振れ角の補正切片である。
次に、バックスピン及びサイドスピンの算出方法説明がされる。図14(a)は、第五カメラ3Eから得られた2次元データのイメージを示している。図14(b)は、第六カメラ3Fから得られた2次元データのイメージを示している。この例では、バックスピンの計測値SbmはXZ平面の2次元データから求められる。
図14(a)の2次元データにおいて、ボール6の中心の点Pb1が求められる。ボール表面のマークから任意の2点(M1及びM2)が選定される。同様に、図14(b)の2次元データにおいて、ボール6の中心の点Pb2が求められる。図14(a)のイメージで特定されたマークの2点(M1及びM2)が特定される。
図14(a)の矢印Vm1は、点Pb1から点M1までのベクトルを示している。矢印Vm2は、点Pb1から点M2までのベクトルを示している。図14(b)の矢印Vm3は、点Pb2から点M1までのベクトルを示している。矢印Vm4は、点Pb2から点M2までのベクトルを示している。このベクトルVm1とVm3とからボール6の回転角ψ1が求められる。ベクトルVm2とベクトルVm4とからボール6の回転角ψ2が求められる。この回転角ψ1と回転角ψ2の平均値として回転角ψmが求められる。
回転角ψmのYZ平面の成分である回転角ψmbが求められる。この回転角ψmbと時間間隔T2とからバックスピンの計測値Sbmが求められる。このバックスピンの計測値Sbmからバックスピンの推定値Sbtが下記の式(20)で求められる。
Sbt = A4 ・ Sbm + B4 (20)
A4はバックスピンの補正係数であり、B4はバックスピンの補正切片である。
Sbt = A4 ・ Sbm + B4 (20)
A4はバックスピンの補正係数であり、B4はバックスピンの補正切片である。
同様にして、回転角ψmのXY平面の成分である回転角ψbsが求められる。この回転角ψbsと時間間隔T2とからサイドスピンの計測値Ssが求められる。このサイドスピンの計測値Ssmからサイドスピンの推定値Sstが下記の式(21)で求められる。
Sst = A5 ・ Ssm + B5 (21)
A5はサイドスピンの補正係数であり、B5はサイドスピンの補正切片である。
Sst = A5 ・ Ssm + B5 (21)
A5はサイドスピンの補正係数であり、B5はサイドスピンの補正切片である。
これらの算出されたクラブ挙動の推定値とボール挙動の推定値とは、コンピュータ4に記憶される。コンピュータ4は、クラブ挙動の推定値とボール挙動の推定値とから所定の推定値を、その挙動値として、モニターに表示する。この推定値により求められたインパクト時のフェース面12とボール6の位置関係をイメージ表示してもよい。このイメージ表示に更に時点t=0とt=1とのフェース面12のイメージ表示が合わせてされてもよい。
この計測システム1では、ゴルフクラブ5の挙動に対応してボール6の挙動が記憶されている。ボール速度、打ち出し角、振れ角、バックスピン及びサイドスピンの値が特定されれば、そのボール6の飛距離及び飛ぶ方向が算出され得る。この分析装置は、フェース角、ヘッド軌道角、左右打点位置等のゴルフクラブ5の挙動値に対応して、ボール6の飛距離及び飛ぶ方向が算出され得る。
この計測システム1では、打撃直前のマークがボール6に隠れる位置で撮影できない場合にも、マークの位置が推定されている。この計測システム1では、フェース面12の一部がボール6に隠れる位置でフェース面12が撮影され得る。インパクト時により近い位置のフェース面12が撮影され得る。インパクトに近い位置のデータを基に計測されるので、この計測システム1は計測精度に優れている。
この計測システム1では、ボール6の位置が第四カメラ3Dと第五カメラ3Eとの組合せで撮影され、第四カメラ3Dと第六カメラ3Fとの組合せで撮影される。光軸が互いにほぼ垂直に交差するカメラの組合せで、ボール6の挙動値が計測されているので、3次元での各挙動値を精度よく計測し得る。
この計測システム1は、画像データから計算された計測値Mmが補正されて、推定値Msが求められている。これにより、撮影された画像データから求められる挙動値の精度に優れている。この計測システム1は、ゴルフクラブ5及びボール6の挙動値が精度良く求められる。
この計測システム1は、インパクト時のクラブ挙動の推定値を、計測結果として提供し得る。ゴルファーに分かり易い情報として提供し得る。この計測システム1では、ゴルフクラブ5の挙動値とボール6の挙動値と更にはボール6の飛距離及び飛ぶ方向とを合わせて提供することで、より分かりやすい分析結果を提供し得る。
このクラブ挙動値及びボール挙動値に基づいて、ゴルフクラブ5のフィッティングを行えば、ボール6の飛距離又は飛ぶ方向の観点から最も適したフィッティングがし得る。
1・・・計測システム
2A・・・(アイアン系の)クラブヘッド
2W・・・(ウッド系の)クラブヘッド
3・・・カメラ
4・・・コンピュータ
5・・・ゴルフクラブ
6・・・ボール
7・・・ストロボ
8・・・光センサ
12A・・・(アイアン系クラブヘッドの)フェース面
12W・・・(ウッド系クラブヘッドの)フェース面
13A・・・(アイアン系クラブヘッドの)トップ部
13W・・・(ウッド系クラブヘッドの)トップ部
14・・・ティー
2A・・・(アイアン系の)クラブヘッド
2W・・・(ウッド系の)クラブヘッド
3・・・カメラ
4・・・コンピュータ
5・・・ゴルフクラブ
6・・・ボール
7・・・ストロボ
8・・・光センサ
12A・・・(アイアン系クラブヘッドの)フェース面
12W・・・(ウッド系クラブヘッドの)フェース面
13A・・・(アイアン系クラブヘッドの)トップ部
13W・・・(ウッド系クラブヘッドの)トップ部
14・・・ティー
好ましくは、この挙動計測方法では、上記ヘッドの挙動値は、ヘッド速度、打点、フェース角又は動ロフト角である。上記ボールの挙動値は、ボール速度、振れ角、打ち出し角、バックスピン及びサイドスピンである。
好ましくは、この計測システムでは、上ボールカメラの光軸と横ボールカメラの光軸とがなす角度は、80°以上100°以下である。この右カメラ及び左カメラの各光軸が、XYZの3次元直交座標系のXZ平面において、水平線に対して30°以上60°以下の角度をなしている。この右カメラの光軸は、XY平面において、X軸に対して0°以上35°以下の角度をなしている。この左カメラの光軸は、XY平面において、X軸に対してマイナス35°以上0°以下の角度をなしている。この左右のカメラの光軸同士が、XY平面において、20°以上90°以下の角度をなしている。この上カメラの光軸が、ゴルフボールの中心を通る鉛直線に対して80°以上100°以下の角度をなしている。
この分析の精度の観点から、第二カメラ3B及び第三カメラ3Cは、それぞれの光軸LB及び光軸LCが、好ましくは、ボール6の載置位置から地面(床面)に対してXZ平面で30°以上60°以下の範囲の角度をなして設置される。また、第二カメラ3Bの光軸LBの方向は、好ましくは、XY平面(平面視)でX軸に対して0°以上35°(Y軸のプラス方向)以下の範囲の角度をなしている。好ましくは、第三カメラ3Cの光軸LCの方向は、平面視でX軸に対してマイナス35°(Y軸のマイナス方向)以上0°以下の範囲の角度をなしている。
以上に説明された計測システム1により、DLT法が用いられて、ヘッド2の位置、姿勢等の3次元データが時系列で得られる。得られた上記3次元データに基づいて、フェース面12とボール6との3次元座標上の位置関係が時系列に更新され、フェース面12とボール6との接触する時点(インパクト時)が特定される。最終的に、インパクト時のヘッド2の挙動が推定される。上記挙動とは、例えば、ヘッド2の動ロフト角、フェース角(開き角)、ブロー角、進入角、打点等である。
点G(Xg、Zg)及び点H(Xh、Zh)と同様にして、点Pb2(Xp2、Zp2)は、図11(b)の点J(Xj、Zj)及び点K(Xk、Zk)から、下記の式(13)で求められる。
Xp2=(Xj+Xk)/2 (13)
Zp2=(Zj+Zk)/2
Xp2=(Xj+Xk)/2 (13)
Zp2=(Zj+Zk)/2
次に、振れ角の算出方法説明がされる。図12(b)を示して前述したように、振れ角θ2が求められる。ここでは、振れ角の計測値θuは、振れ角θ2として求められる。この例では、振れ角の計測値θuはXY平面に2次元データから求められている。この計測値θuは、(STEP32)で得られており、(STEP31)を経ずに得られている。
Claims (6)
- ゴルフクラブのヘッドのフェース面に少なくとも3個のマークを付するステップと、
少なくとも3台のクラブカメラが、インパクト時前の2時点において同時に撮影するステップと、
このインパクト時前の2時点において同時に撮影した画像信号からマークの複数の2次元データを得るステップと、
この2時点のマークの2次元データから2時点のマークの3次元位置を特定するステップと、
この2時点の各マークの3次元位置からフェース面の挙動を特定するステップと、
このフェース面の挙動とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定するステップと、
このフェース面とボールとの接触時点のヘッドの挙動を推定するステップと、
少なくとも2台のボールカメラが、打撃されたボールを2時点において同時に撮影するステップと、
この打撃されたボールを2時点において同時に撮影した画像信号からボールの複数の2次元データを得るステップと、
この2時点のボールの2次元データから2時点のボールの3次元位置姿勢を特定するステップと、
この2時点のボールの3次元位置姿勢からボールの挙動値を推定するステップと
を含むヘッド及びボールの挙動の計測方法。 - 上記ゴルフクラブがウッド系ゴルフクラブであり、
このウッド系ゴルフクラブのヘッドのクラウンに帯状のマークを付するステップを更に含んでおり、
上記2時点における帯状マークの位置データから上記2時点間の帯状マークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。 - 上記ゴルフクラブがアイアン系ゴルフクラブであり、
このアイアン系ゴルフクラブのヘッドのトップに離間した2個のマークを付するステップを更に含んでおり、
上記2時点における2個のマークの位置データから上記2時点間の2個のマークの回転角を算出し回転行列を求めており、この2時点のいずれかの時点の一方の3個のマークのうち1個のマークの3次元位置が特定されないときに、この回転行列を用いて推定されている。 - 上記ヘッドの挙動値がヘッド速度、打点、フェース角又は動ロフトであり、
上記ボールの挙動値がボール速度、振れ角、打ち出し角、バックスピン及びサイドスピンである請求項1から3のいずれかに記載の計測方法。 - ゴルフクラブのヘッドの挙動を連続撮影する上クラブカメラと、右クラブカメラ及び左クラブカメラと、ゴルフボールの挙動を連続撮影する上ボールカメラと、横ボールカメラと、情報処理装置とを備えており、
この上クラブカメラが打撃されるボールの上方に配置されており、右クラブカメラと左左クラブカメラとが前方左右に離間して配置されており、
この上ボールカメラが打撃されるボールの上方に配置されており、横ボールカメラが打撃されるボールの左右いずれかの側に位置しており、
このクラブカメラが同期させられて連続撮影可能にされており、
このボールカメラが同期させられて連続撮影可能にされており、
この情報処理装置が、連続撮影されたクラブの画像データからヘッドの挙動を特定し、このヘッドの挙動からヘッドのフェース面とボールとの位置関係を時系列に更新することにより、フェース面とボールとの接触時点を特定し、この接触時点のヘッドの挙動値と打撃されたボールの挙動値とを計測する計測システム。 - 上ボールカメラの光軸と横ボールカメラの光軸とがなす角度が80°以上100°以下であり、
この右カメラ及び左カメラの各光軸が、XYZの3次元直交座標系のXZ平面において、水平線に対して30°以上60°以下の角度をなしており、
この左カメラの光軸が、XY平面において、X軸に対して0°以上35°以下の角度をなしており、
この右カメラの光軸が、XY平面において、X軸に対してマイナス35°以上0°以下の角度をなしており、
この左右のカメラの光軸同士が、XY平面において、20°以上90°以下の角度をなしており、
この上カメラの光軸が、ゴルフボールの中心を通る鉛直線に対して80°以上100°以下の角度をなしている請求項5に記載の計測システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011033169A JP2012170532A (ja) | 2011-02-18 | 2011-02-18 | ゴルフクラブ及びボールの挙動の計測方法 |
| US13/399,634 US8708833B2 (en) | 2011-02-18 | 2012-02-17 | Method for measuring behavior of golf club and ball |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011033169A JP2012170532A (ja) | 2011-02-18 | 2011-02-18 | ゴルフクラブ及びボールの挙動の計測方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012170532A true JP2012170532A (ja) | 2012-09-10 |
Family
ID=46974020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011033169A Withdrawn JP2012170532A (ja) | 2011-02-18 | 2011-02-18 | ゴルフクラブ及びボールの挙動の計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012170532A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014199189A (ja) * | 2013-03-29 | 2014-10-23 | ダンロップスポーツ株式会社 | マーカーが固着された移動体 |
| KR101905848B1 (ko) | 2017-01-17 | 2018-10-08 | 주식회사 스트로크플레이 | 골프클럽 및 골프공 측정장치 및 측정방법 및 이를 수행하기 위한 프로그램을 기록한 컴퓨터로 판독가능한 기록매체 |
| JP2019136500A (ja) * | 2018-02-07 | 2019-08-22 | シリコングラフィー インコーポレイテッドSilicongraphy inc. | パッティング動作分析システム |
| WO2020026625A1 (ja) | 2018-07-30 | 2020-02-06 | 住友ゴム工業株式会社 | ゴルフクラブ用グリップおよびゴルフクラブ |
| WO2021085453A1 (ja) * | 2019-10-31 | 2021-05-06 | 株式会社ライゾマティクス | 認識処理装置、認識処理プログラム、認識処理方法、及びビジュアライズシステム |
| CN113011273A (zh) * | 2021-02-24 | 2021-06-22 | 深圳市瑞驰文体发展有限公司 | 一种台球球杆智能视觉检测方法及系统 |
| KR20240112182A (ko) * | 2023-01-11 | 2024-07-18 | 배현직 | 사용자의 스윙을 분석하여 예측 정보를 생성하는 골프 스윙 분석 장치, 방법 및 프로그램 |
-
2011
- 2011-02-18 JP JP2011033169A patent/JP2012170532A/ja not_active Withdrawn
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014199189A (ja) * | 2013-03-29 | 2014-10-23 | ダンロップスポーツ株式会社 | マーカーが固着された移動体 |
| KR101905848B1 (ko) | 2017-01-17 | 2018-10-08 | 주식회사 스트로크플레이 | 골프클럽 및 골프공 측정장치 및 측정방법 및 이를 수행하기 위한 프로그램을 기록한 컴퓨터로 판독가능한 기록매체 |
| JP2019136500A (ja) * | 2018-02-07 | 2019-08-22 | シリコングラフィー インコーポレイテッドSilicongraphy inc. | パッティング動作分析システム |
| WO2020026625A1 (ja) | 2018-07-30 | 2020-02-06 | 住友ゴム工業株式会社 | ゴルフクラブ用グリップおよびゴルフクラブ |
| US11771967B2 (en) | 2018-07-30 | 2023-10-03 | Sumitomo Rubber Industries, Ltd. | Golf club grip and golf club |
| WO2021085453A1 (ja) * | 2019-10-31 | 2021-05-06 | 株式会社ライゾマティクス | 認識処理装置、認識処理プログラム、認識処理方法、及びビジュアライズシステム |
| JP2021071953A (ja) * | 2019-10-31 | 2021-05-06 | 株式会社ライゾマティクス | 認識処理装置、認識処理プログラム、認識処理方法、及びビジュアライズシステム |
| JP7281767B2 (ja) | 2019-10-31 | 2023-05-26 | 株式会社アブストラクトエンジン | 認識処理装置、認識処理プログラム、認識処理方法、及びビジュアライズシステム |
| CN113011273A (zh) * | 2021-02-24 | 2021-06-22 | 深圳市瑞驰文体发展有限公司 | 一种台球球杆智能视觉检测方法及系统 |
| KR20240112182A (ko) * | 2023-01-11 | 2024-07-18 | 배현직 | 사용자의 스윙을 분석하여 예측 정보를 생성하는 골프 스윙 분석 장치, 방법 및 프로그램 |
| KR102840744B1 (ko) * | 2023-01-11 | 2025-07-30 | 배현직 | 사용자의 스윙을 분석하여 예측 정보를 생성하는 골프 스윙 분석 장치, 방법 및 프로그램 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8708833B2 (en) | Method for measuring behavior of golf club and ball | |
| JP5932059B2 (ja) | ゴルフクラブヘッド測定装置 | |
| JP5407658B2 (ja) | ゴルフクラブの選択方法およびゴルフクラブの選択システム | |
| KR102408358B1 (ko) | 레이더 및 촬상 요소를 포함하는 조립체 | |
| JP2012170532A (ja) | ゴルフクラブ及びボールの挙動の計測方法 | |
| JP5365486B2 (ja) | ゴルフスウィングの分類方法およびチャート | |
| CN103857445B (zh) | 高尔夫球杆的变形的测量系统、测量方法和测量装置 | |
| JP6125146B2 (ja) | ゴルフクラブヘッドの計測方法 | |
| CN102847291B (zh) | 用于挥杆时高尔夫球杆头行为的测量分析系统和方法 | |
| US8852016B2 (en) | Golf swing analysis apparatus | |
| JP4109094B2 (ja) | 球体の回転特性と飛行特性の測定方法 | |
| JP5975711B2 (ja) | ゴルフスイングの分類方法、分類システム、分類装置およびプログラム | |
| JP4109075B2 (ja) | 球体の回転特性と飛行特性の測定方法及び球体の回転特性と飛行特性の測定装置 | |
| JP4028771B2 (ja) | ゴルフスイングのインパクト状態計測方法 | |
| JP5676300B2 (ja) | ゴルフクラブヘッドの挙動の計測方法 | |
| JP5471357B2 (ja) | ゴルフクラブのスウィングの表示方法および表示図表 | |
| KR20180028449A (ko) | 골프 클럽의 스윙의 표시 방법 및 표시 도표 | |
| JP5540665B2 (ja) | ゴルフクラブの選定方法および選定装置並びにゴルフクラブ | |
| JP2010158332A (ja) | ゴルフクラブの選定方法 | |
| TWI775636B (zh) | 高爾夫揮桿解析系統、高爾夫揮桿解析方法及資訊記憶媒體 | |
| JP2011130964A (ja) | ゴルフ及びその他の運動用具のスイング計測システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |