JP2012175146A - 撮像素子、撮像装置、撮像素子の製造方法 - Google Patents
撮像素子、撮像装置、撮像素子の製造方法 Download PDFInfo
- Publication number
- JP2012175146A JP2012175146A JP2011032009A JP2011032009A JP2012175146A JP 2012175146 A JP2012175146 A JP 2012175146A JP 2011032009 A JP2011032009 A JP 2011032009A JP 2011032009 A JP2011032009 A JP 2011032009A JP 2012175146 A JP2012175146 A JP 2012175146A
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- transparent plate
- image sensor
- imaging
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Landscapes
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
- Solid State Image Pick-Up Elements (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Studio Devices (AREA)
Abstract
【課題】遮光マスクが設けられた透明板と撮像素子基板とを短時間に高い精度で位置合わせし得る撮像素子等を提供する。
【解決手段】複数の画素14Pが2次元状に配列された撮像素子基板3Pと、撮像素子基板3Pに対して画素位置を合わせて貼設された透明板37と、を備えた撮像素子3であって、透明板37上に、第1の瞳領域の光を通過させるための第1の遮光マスク38Aと、第2の瞳領域の光を通過させるための第2の遮光マスク38Bと、全遮光マスク38Xと、を設け、第1の画素14Pおよび第1の遮光マスク38Aの組が第1の焦点検出画素13Aを、第2の画素14Pおよび第2の遮光マスク38Bの組が第2の焦点検出画素13Bを、第3の画素14Pおよび全遮光マスク38Xの組が位置情報画素15を、それぞれ構成する。
【選択図】図6
【解決手段】複数の画素14Pが2次元状に配列された撮像素子基板3Pと、撮像素子基板3Pに対して画素位置を合わせて貼設された透明板37と、を備えた撮像素子3であって、透明板37上に、第1の瞳領域の光を通過させるための第1の遮光マスク38Aと、第2の瞳領域の光を通過させるための第2の遮光マスク38Bと、全遮光マスク38Xと、を設け、第1の画素14Pおよび第1の遮光マスク38Aの組が第1の焦点検出画素13Aを、第2の画素14Pおよび第2の遮光マスク38Bの組が第2の焦点検出画素13Bを、第3の画素14Pおよび全遮光マスク38Xの組が位置情報画素15を、それぞれ構成する。
【選択図】図6
Description
本発明は、焦点検出機能を備えた画素を有する撮像素子、該撮像素子を用いた撮像装置、および該撮像素子の製造方法に関する。
撮像装置において合焦位置からのずれ量を検出する技術として、位相差検出方式が知られている。この位相差検出方式は、結像光学系の射出瞳を通過した光束を2分割し、2分割した光束を焦点検出用センサにより受光して、その受光量に応じて出力される信号のずれ量、つまり分割された光束により結像される2つの像の相対的位置ずれ量(位相差)を検出することにより、結像光学系の焦点のずれ量を求めるものである。
このような位相差の検出を、結像光学系を通して撮像素子上に結像された像を利用して行うために、瞳分割を行う遮光部を設けた撮像素子と、この撮像素子を用いた位相差検出方法と、が提案されている。このような提案としては、例えば特開2009−44535号公報に記載された技術が挙げられ、該公報には、撮像素子を製造するための半導体製造プロセスにおいて、撮像素子を構成するフォトダイオードとカラーフィルタとの間に瞳分割用の遮光部を設けることが記載されている。
しかし、上記公報に記載されたような構成の場合には、新規の専用撮像素子の開発が必要であるために開発コストが大幅に高くなるとともに、通常の撮像素子を製造するのとは異なる半導体製造プロセスが必要となるために、製造コストも高価となる。さらに、製造後においても、通常撮像素子と焦点検出機能付き撮像素子とを区別する必要があるために、管理コストが高くなる。
このような点に対応するための構成として、通常の半導体製造プロセスにより製造された撮像素子に対して、瞳分割用の遮光部である遮光マスクを設けた透明板(例えば、ガラス板など)を貼設することで、焦点検出機能付き撮像素子を製造することが考えられる。このような構成によれば、上述した点に対応し得るだけでなく、実績のある撮像素子を使用することができるために、安定した性能が得られる利点もある。
このような構成の撮像素子の画素値から位相差検出用の情報を正しく得るためには、位相差検出用として予め位置を定められた画素上に、遮光マスクが正しく配置される必要がある。従って、遮光マスクを設けた透明板を通常の撮像素子に対して正確に位置合わせしなければならない。しかも、生産性を考慮すると、なるべく短時間で位置合わせを行い得ることが望ましい。
本発明は上記事情に鑑みてなされたものであり、遮光マスクが設けられた透明板と、複数の画素が2次元状に配列された撮像素子基板とを、短時間に高い精度で位置合わせして貼設可能な構造を備えた撮像素子、該撮像素子を用いた撮像装置、および該撮像素子の製造方法を提供することを目的としている。
上記の目的を達成するために、本発明の第1の態様による撮像素子は、光学的な被写体像を光電変換するための画素が、複数、2次元状に配列されるように、半導体製造プロセスにより形成された撮像素子基板と、上記撮像素子基板に対して画素位置を合わせて貼設された透明板と、を具備した撮像素子であって、上記撮像素子基板に配列された複数の画素は、第1の所定位置にある第1の画素と、第2の所定位置にある第2の画素と、第3の所定位置にある第3の画素と、を含み、上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第1の画素の中心から一方向へ偏心した部分を遮光するように設けられた第1の遮光マスクと、上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第2の画素の中心から他方向へ偏心した部分を遮光するように設けられた第2の遮光マスクと、上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第3の画素を全遮光するように設けられた全遮光マスクと、をさらに具備し、上記第1の画素および上記第1の遮光マスクの組が第1の焦点検出画素を、上記第2の画素および上記第2の遮光マスクの組が第2の焦点検出画素を、上記第3の画素および上記全遮光マスクの組が位置情報画素を、それぞれ構成することを特徴とする。
また、本発明の第2の態様による撮像装置は、上述した撮像素子と、上記撮像素子上に被写体像を形成する結像光学系と、上記第1の焦点検出画素からの出力により形成される第1の画像と、上記第2の焦点検出画素からの出力により形成される第2の画像と、の位相差を検出する位相差検出部と、を具備したものである。
さらに、本発明の第3の態様による撮像素子の製造方法は、上述した撮像素子であり、上記透明板上に上記全遮光マスクが複数設けられている撮像素子を製造するための方法であって、上記撮像素子基板に対して上記透明板を配置し、透明板が配置された撮像素子基板に平行光を照射して、該撮像素子基板により第1の撮像を行うステップと、上記第1の撮像により上記撮像素子基板から得られた画像信号に基づき、上記全遮光マスクの陰影が形成された全遮光マスク位置を、少なくとも2つ取得するステップと、取得された2つの全遮光マスク位置を結ぶ直線と、該2つの全遮光マスクが配置されるべき2つの上記第3の所定位置を結ぶ直線と、がなす傾き角を算出するステップと、上記傾き角を0にするように、上記撮像素子基板に対して上記透明板を回転するステップと、上記透明板の回転が終了した後の撮像素子基板に平行光を照射して、該撮像素子基板により第2の撮像を行うステップと、上記第2の撮像により上記撮像素子基板から得られた画像信号に基づき、少なくとも1つの上記全遮光マスクの陰影が形成された全遮光マスク位置を取得するステップと、上記取得された全遮光マスク位置と、該全遮光マスクが配置されるべき上記第3の所定位置と、の差分を算出するステップと、上記差分を相殺するように、上記撮像素子基板に対して上記透明板を平行移動するステップと、を含む方法である。
本発明の撮像素子、該撮像素子を用いた撮像装置、および該撮像素子の製造方法によれば、遮光マスクが設けられた透明板と、複数の画素が2次元状に配列された撮像素子基板とを、短時間に高い精度で位置合わせして貼設可能となる。
以下、図面を参照して本発明の実施の形態を説明する。
[実施形態1]
[実施形態1]
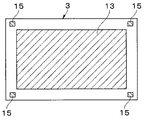
図1から図15は本発明の実施形態1を示したものであり、図1は撮像素子3の構成を示す正面図である。
撮像素子3は、例えば周辺部を除く中央の矩形状部分に、後述する焦点検出画素が配置された領域である瞳分割用遮光マスク領域13が設けられている。ここに、瞳分割用遮光マスク領域13は、そのほとんどが、複数の撮影画素14(図6等参照)が2次元状に配列された部分となっているが、この撮影画素14の配列中の幾つかの箇所に焦点検出画素13A,13B(図6等参照)が対をなして配置された構成となっている。
さらに、撮像素子3の例えば周辺部には、1つ以上、望ましくは複数の位置情報画素15が設けられている。特にこの図1に示す例では、位置情報画素15は、撮像素子3の4箇所の角部(四隅部)にそれぞれ1画素ずつ、合計4画素設けられている。
この撮像素子3は、図2および図3に示すような、半導体製造プロセスにより形成された撮像素子基板3P(この撮像素子基板3Pは、通常の撮像素子と同様の構成である)と、図4および図5に示すような、半導体製造プロセスによることなく形成された透明板37とを、画素位置を合わせて貼設した構成(図6参照)となっている。
ここに、図2は複数の画素14Pが2次元状に配列された撮像素子基板3Pの構成を示す正面図、図3は撮像素子基板3P上の画素14Pの構造を示す図2のA−A断面図、図4は遮光マスク38A,38Bが形成された特定ライン部分の透明板37の構成を示す要部正面図、図5は遮光マスク38A,38Bが形成された特定ライン部分の透明板37の構造を示す図4のB−B断面図、図6は撮影画素14、2種類の焦点検出画素13A,13B、および位置情報画素15の構成を示す断面図である。
図2に示すように、撮像素子基板3Pは、光学的な被写体像を光電変換するための画素14Pが、複数、2次元マトリックス状に配列されていて、この図2に示す例では、ライン方向(行方向、あるいは水平方向)およびこのライン方向に垂直な方向(列方向、あるいは垂直方向)に配列されている。
各画素14Pは、図3に示すように、半導体基板31内に不純物をドープして形成されたフォトダイオード32と、半導体基板31上に形成された配線パターン33,34と、マイクロレンズ35と、を有しており、深部から表層へ向かって、光電変換部層PD、配線層WL、マイクロレンズ層MLが形成された積層構造となっている。
配線パターン33,34は、遮光機能を有するとともにフォトダイオード32に各対応する位置に開口が形成されていて、この図3に示す構成例では、配線パターン34に設けられた開口(およびマイクロレンズ35)がこの画素14Pの開口率を規定している。
また、マイクロレンズ35は、中心がフォトダイオード32の中心の鉛直線(1点鎖線で示す線)上に位置するように構成されている。
図4および図5に示すように、透明板37は、ガラス等の素材により形成された透明な平板に、2種類の遮光マスク38A,38Bと、全遮光マスク38X(図6等参照)と、を設けたものである。ここに図1に示したように、位置情報画素15を撮像素子3の4箇所の角部(四隅部)にそれぞれ1つずつ設ける場合には、全遮光マスク38Xも透明板37上の4箇所の角部(四隅部)にそれぞれ1つずつ設けることになる。後で説明するように、全遮光マスク38Xを複数設ける場合には、透明板37上の周辺領域に、互いに離隔して設けることが望ましい。このような構成であるために、以下では、遮光マスク38A,38B,38Xが設けられた透明板37を、適宜、遮光マスクガラスなどとも述べる。これらの遮光マスク38A,38Bおよび全遮光マスク38Xは、例えば、黒色のクロム膜を、透明板37の撮像素子基板3Pに対向する側の面に蒸着して構成したものとなっている。なお、図4および後述する図7においては、点線を用いて各画素の範囲を示しているが、この点線は説明のために記載しただけであり、実際の透明板37上には存在していない。
ここに、第1の遮光マスク38Aは、透明板37上に、該透明板37が撮像素子基板3Pに画素位置を合わせて貼設された際に、撮像素子基板3P上の第1の所定位置にある第1の画素14Pの中心から一方向へ偏心した部分を遮光する(図6も参照)ように設けられたものである。そして、第1の画素14Pおよび第1の遮光マスク38Aの組が、図6に示す第1の焦点検出画素13Aを構成するようになっている。このような構成により、第1の焦点検出画素13Aは、後述する結像光学系1(図15参照)の射出瞳を異なる2つの瞳領域に区分した(すなわち、瞳分割した)内の、第1の瞳領域(ここに、第1の瞳領域を瞳Aということにする)を通過した光束を受光することになるために、以下では適宜、瞳A焦点検出画素13Aなどと呼ぶことにする。
また、第2の遮光マスク38Bは、透明板37上に、該透明板37が撮像素子基板3Pに画素位置を合わせて貼設された際に、撮像素子基板3P上の第2の所定位置にある第2の画素14Pの中心から他方向へ偏心した部分を遮光する(図6も参照)ように設けられたものである。そして、第2の画素14Pおよび第2の遮光マスク38Bの組が、図6に示す第2の焦点検出画素13Bを構成するようになっている。このような構成により、第2の焦点検出画素13Bは、後述する結像光学系1(図15参照)の射出瞳を異なる2つの瞳領域に区分した(すなわち、瞳分割した)内の、第2の瞳領域(ここに、第2の瞳領域を瞳Bということにする)を通過した光束を受光することになるために、以下では適宜、瞳B焦点検出画素13Bなどと呼ぶことにする。
さらに、全遮光マスク38Xは、透明板37上に、該透明板37が撮像素子基板3Pに画素位置を合わせて貼設された際に、撮像素子基板3P上の第3の所定位置にある第3の画素14Pを全遮光する(図6も参照)ように設けられたものである。そして、第3の画素14Pおよび全遮光マスク38Xの組が、図6に示す位置情報画素15を構成するようになっている。このような構成により、透明板37が撮像素子基板3Pに対して画素位置を正しく合わせて貼設された場合には、位置情報画素15の画素値がほぼゼロに近い値となる。
なお、撮影画素14は、撮像素子基板3Pの画素14P上に、透明板37の透明部分のみが配置されることにより構成される。
そして、撮像素子基板3Pに透明板37を貼設することにより、撮像素子3は、図6に示すように、遮光マスク透明板層MGをさらに設けた積層構造となる。
図7は、位置情報画素15と焦点検出画素13A,13Bとの位置関係を示す図である。
位置情報画素15は、焦点検出画素13A,13Bに対して予め定められた位置関係を有するように配置されていて、この図7に示す例においては、瞳分割用遮光マスク領域13内において該位置情報画素15に最も近接している焦点検出画素(ここでは、瞳A焦点検出画素13A)に対して、水平方向に距離Oh、垂直方向に距離Ovを隔てるように配置されている。ここに、距離Ohは水平方向の画素ピッチの整数倍、距離Ovは垂直方向の画素ピッチの整数倍である。
次に、図8は、撮像素子の製造装置の構成を示すブロック図である。
この図8の構成によって行う撮像素子の製造工程は、半導体製造プロセスが終了した撮像素子基板3Pと、遮光マスク38A,38Bおよび全遮光マスク38Xが既に形成された透明板37と、を位置合わせして貼設する工程であり、図8に示す撮像素子の製造装置は、貼り合わせ調整装置であるということもできる。
この撮像素子の製造装置は、コリメータ光源21と、遮光マスクガラス移動装置22と、撮像素子駆動部23と、位置情報画素分離タイミングデコーダ24と、位置情報画素ホールド回路25と、最小値位置検出回路26と、位置決制御部27と、走査制御回路28と、を含んで構成されていて、製造の対象となる透明板37および撮像素子基板3Pが取り付けられるようになっている。
コリメータ光源21は、平行光であるコリメータ光を、透明板37を介して撮像素子基板3Pへ照射するものである。
遮光マスクガラス移動装置22は、ピックアップ部により透明板37を保持して、保持した状態の透明板37を平行移動したり、回転移動したりする装置である。ここに、ピックアップ部は、例えば、真空ポンプによる吸引によって透明板37を引き付け保持し、吸引を停止することによって透明板37を開放するようになっている。
撮像素子駆動部23は、通常の撮像素子として機能する撮像素子基板3Pへ水平同期信号HDと垂直同期信号VDとを出力して、撮像素子基板3P上に配列された複数の画素を所定の順序で駆動するようになっている。従って、画像信号は、読み出された画素順に、画素単位の画像信号(画素データ)として撮像素子基板3Pから出力されることになる。さらに、撮像素子駆動部23は、撮像素子基板3Pへ出力している水平同期信号HDおよび垂直同期信号VDに基づいて、撮像素子基板3Pから読み出されている画素位置の情報である読出位置情報を位置情報画素分離タイミングデコーダ24へ出力すると共に、相関タイミング信号を位置情報画素ホールド回路25へ出力するようになっている。ここに、読出位置情報は、例えば、マトリックス配列された複数の画素の位置に対応した、所定のタイミングを有するパルス信号である。
位置情報画素分離タイミングデコーダ24は、撮像素子駆動部23からの読出位置情報に基づいて、その読出位置の画素が位置情報用の画素(全遮光マスク38Xが位置するべき第3の所定位置にある第3の画素)であることを示す信号である位置情報画素指示信号を生成し、位置情報画素ホールド回路25へ出力する回路である。すなわち、位置情報画素分離タイミングデコーダ24は、例えば、読出位置情報のパルス信号をカウントするカウンタと、位置情報用の画素の位置に対応する値を保持する記憶部とを備え、カウント値が所定値(すなわち位置情報検出用の画素の位置に対応する値)になったときに、位置情報画素指示信号を出力するように構成されている。
位置情報画素ホールド回路25は、位置情報画素分離タイミングデコーダ24から位置情報画素指示信号が入力されると、撮像素子基板3Pから入力された画像信号が位置情報用の画素の信号であると識別する回路である。後述するように、透明板37は、最初の段階で、撮像素子基板3Pに対して例えば数十ミクロンの精度で位置合わせをされている。従って、位置情報画素指示信号を受けた画素の近傍に、全遮光マスク38Xの陰影が投影された画素が存在するであろうと推定することができる。そこで、位置情報画素ホールド回路25は、撮像素子駆動部23からの相関タイミング信号に基づいて、撮像素子基板3Pからの画像信号に含まれる位置情報用画素とその近傍の画素の画素データをホールドして、最小値位置検出回路26へ出力する回路ともなっている。
最小値位置検出回路26は、位置情報画素ホールド回路25によりホールドされた画素データ中の、周辺の画素値よりも低い画素値を示す画素を検出して(図12等も参照)、その画素位置を記憶する回路である。このとき、最小値位置検出回路26は、画素値が最小値を示す画素については、その画素位置が最小値に対応する画素位置であることも記憶しておく。
位置決制御部27は、最小値位置検出回路26により検出された低い画素値を示す画素の画素位置と画素値とに基づいて、撮像素子基板3Pに対して透明板37を移動するべき走査方向(平行移動方向、回転移動方向など)および走査量(平行移動量、回転移動量など)を決定するものである。
走査制御回路28は、位置決制御部27により決定された走査方向および走査量に基づいて、遮光マスクガラス移動装置22を制御し、撮像素子基板3Pに対する透明板37の2次元的な位置を変更する走査を行わせるものである。この走査制御回路28は、現在の走査位置情報を最小値位置検出回路26へ出力するようになっている。
次に、図9は、撮像素子の製造装置により位置調整を行う前の、撮像素子基板3Pと透明板37との位置関係の例を示す図である。
撮像素子の製造装置により位置調整を行う前に、透明板37は、観察カメラ等によって観察を行いながら、撮像素子基板3Pに対して例えば数十ミクロンの精度で位置合わせをされているものとする。従って、位置情報画素15を撮像素子3の4箇所の角部(四隅部)に設ける場合には、この初期の位置合わせ誤差を考慮しても、全遮光マスク38Xが撮像素子基板3P上の何れかの画素14P上に配置されるような、角端よりもやや内側の位置であることが望ましい。こうして、コリメータ光によって形成される全遮光マスク38Xの陰影は、全て撮像素子基板3P上に投影されて、該撮像素子基板3Pにより撮像可能であるものとする。
このような前提の下に、撮像素子の製造装置により位置調整を行う。ここに図13は、撮像素子の製造装置による位置調整の処理を示すフローチャートである。
この処理を開始すると、透明板37が配置された撮像素子基板3Pにコリメータ光源21からコリメータ光を照射する。そして、撮像素子駆動部23の制御により、撮像素子基板3Pに第1の撮像を行わせ、画像信号の読み出しを行う(ステップS1)。
こうして読み出された画像信号には、四隅部に配置された全遮光マスク38Xの陰影が各形成された、4点の暗部画素(ピクセル)群が存在するはずである。
ここに、図10は初期状態の全遮光マスク38Xと各画素14Pとの位置関係の例を示す図である。
全遮光マスク38Xの陰影は、1つの画素14P上に完全に一致するのでない限り、複数の画素上にまたがって位置しているはずである。そして、最も一般的には、全遮光マスク38Xの陰影は、この図10に示すように、4つの画素14Pにまたがって存在しているはずである。このような理由から、ここでは暗部ピクセル「群」と記載している。
そして、最小値位置検出回路26が、これらの4点の暗部ピクセル群の内の、少なくとも2点の暗部ピクセル群のピクセル位置を取得する(ステップS2)。ここで取得するのは、後述するステップS4において説明するように、撮像素子基板3Pに対する透明板37の回転移動方向の位置ずれを検出するためのピクセル位置である。そして、対角方向の暗部ピクセル群同士の場合には計算がやや面倒になることから、4辺の内の何れかの辺に沿った暗部ピクセル群同士であることが望ましい。さらに、検出精度を高くするためには、暗部ピクセル群同士の位置間隔が長い方が望ましい。このような理由から、ここでは矩形をなす撮像素子基板3Pの長辺方向に配列された2点の暗部ピクセル群(つまり例えば、左上の暗部ピクセル群および右上の暗部ピクセル群(ただし、左下の暗部ピクセル群および右下の暗部ピクセル群でももちろん構わない))のピクセル位置を取得している。
さらに、このときに取得する位置は、画素単位の位置ではなく、図10に示すような4つの画素14Pにまたがって存在していると考えられる全遮光マスク38Xの中心位置であることが望ましい。この中心位置は、4つの画素14Pの出力値が、全遮光マスク38Xの陰影によって最大値から低くなっている値に基づいて求めることが可能である(平行が成立した後の計算例を後述するので、それを参照)。従って、このステップS2においては、さらに位置決制御部27が、暗部ピクセル群の中心位置を算出する処理を行う。
次に、位置決制御部27が、2点の暗部ピクセル群のピクセル位置の、図9に示すようなX方向(水平方向)の差分Xa、およびY方向(垂直方向)の差分Yaを算出する(ステップS3)。
そして、位置決制御部27が、撮像素子基板3Pに対する透明板37の回転方向の傾き角θを、次の数式1
[数1]
θ=arctan(Ya/Xa)
により算出する(ステップS4)。ここで算出された傾き角θは、取得された2つの全遮光マスク38Xの位置を結ぶ直線と、これら2つの全遮光マスク38Xが配置されるべき2つの第3の所定位置を結ぶ直線と、がなす角である。このように、4辺の何れかに沿った暗部ピクセル群同士の組み合わせを選択すれば、計算が簡単になる利点がある。
[数1]
θ=arctan(Ya/Xa)
により算出する(ステップS4)。ここで算出された傾き角θは、取得された2つの全遮光マスク38Xの位置を結ぶ直線と、これら2つの全遮光マスク38Xが配置されるべき2つの第3の所定位置を結ぶ直線と、がなす角である。このように、4辺の何れかに沿った暗部ピクセル群同士の組み合わせを選択すれば、計算が簡単になる利点がある。
なお、ここでは4点の暗部ピクセル群の内の2点の暗部ピクセル群のみを用いているが、精度を高めたりあるいは計算結果を検証したりするために、他の組み合わせの暗部ピクセル群をさらに用いるようにしても構わない。
続いて、走査制御回路28が、遮光マスクガラス移動装置22を制御して、算出された傾き角θを0にするように(つまり、傾き角θを相殺する分だけ)、撮像素子基板3Pに対して透明板37を回転する(ステップS5)。
さらに、透明板37の回転が終了した後の撮像素子基板3Pにコリメータ光源21からコリメータ光を照射して、撮像素子駆動部23の制御により、撮像素子基板3Pに第2の撮像を行わせ、画像信号を読み出しを行う(ステップS6)。
こうして読み出された画像信号にも、四隅部に配置された全遮光マスク38Xの陰影が各形成された、4点の暗部画素(ピクセル)群が存在するはずである。しかし、次に行うのは、後述するステップS8において説明するように、撮像素子基板3Pに対する透明板37の平行移動方向の位置ずれの検出であり、このためには少なくとも1点の暗部画素(ピクセル)群のピクセル位置を取得すれば良い。
そこで、4点の暗部画素(ピクセル)群の内の、例えば左上角部に位置する1点の暗部画素(ピクセル)群のピクセル位置を取得する(ステップS7)。
この1点の暗部画素(ピクセル)群は、例えば図11に示すようになっていると考えられる。ここに図11は、傾き角θが補正された後の、透明板37と撮像素子基板3Pとの位置関係の例を示す図である。
図11に示すように、全遮光マスク38Xの陰影は、最も一般的には、4つの画素14Pにまたがって存在していると考えられる。そこで、この図11においては、全遮光マスク38Xの陰影が投影された4つの画素14Pの内の、左上の画素をP1、右上の画素をP2、左下の画素をP3、右下の画素をP4と記載している。また、図11に示したTPは、全遮光マスク38Xが全遮光すべき画素(第3の所定位置にある第3の画素であり、ターゲットピクセル)14Pを示している。
そして、面輝度が均一なコリメータ光が照射された場合には、遮光マスク38A,38Bおよび全遮光マスク38Xの何れの陰影も形成されていない画素14Pは、図12に示すように、全て同一の画素値(以下では「最大画素値」と呼ぶことにするが、ダイナミックレンジの最大値を意味するのではなく、陰影が生じた場合の画素値と比べた場合に最大値になるという意味である)maxを出力するはずである。一方、全遮光マスク38Xの陰影が形成された画素14Pの画素値は、最大画素値maxよりも小さくなる。そして、このような画素値を示す画素14Pが、ターゲットピクセルTPの近傍領域に存在するはずである。
ここに、図12は、全遮光マスク38Xの陰影が形成されている画素位置付近の画素14Pの画素値の例を示す線図である。
そこで、ステップS7における暗部画素(ピクセル)群のピクセル位置としては、ターゲットピクセルTPの近傍領域において、図11に示すような、画素値が最大画素値maxよりも最初に小さくなった画素P1の画素位置(Apx,Apy)を取得するものとする。特に、上述したように撮像素子基板3Pの左上角部に位置する1点の暗部画素(ピクセル)群における画素P1の画素位置を取得する際には、撮像素子基板3P上に形成されている全画素中で、画素値が最大画素値maxよりも最初に小さくなった画素の位置を検出すれば良いために、検出が容易であるとともに、撮像素子基板3Pから画素単位で出力される画像信号を読み出し始めた最も早い時点で画素位置を取得することができる利点がある。
ここで取得される画素位置はピクセル単位の画素位置であるが、図11に示すように、実際の平行移動方向のずれはピクセル単位よりも小さい単位で生じる。
そこで次に、目標との差分計算の処理を行うことにより、より小さい単位(サブピクセル単位)で平行移動方向のずれを算出する(ステップS8)。
ここで図14は、目標との差分計算の処理の詳細を示すフローチャートである。
この処理を開始すると、暗部ピクセルP1と、この暗部ピクセルP1の右隣、下隣、右下隣に位置するピクセルP2〜P4と、の画素値を画像信号からそれぞれ抽出する(ステップS11)。こうして抽出された各ピクセルP1〜P4の画素値の、最大画素値maxからの画素値低下量DP1〜DP4が、全遮光マスク38Xの陰影に起因して生じたものである。
次に、暗部ピクセルP1からの全遮光マスク38Xの陰影のX方向のずれ量Axsubを、次の数式2
[数2]
Axsub=DP2/(DP1+DP2)
により算出する(ステップS12)。
[数2]
Axsub=DP2/(DP1+DP2)
により算出する(ステップS12)。
ただし、図11を見れば分かるように、暗部ピクセルP1に生じた陰影の大きさに対するピクセルP2に生じた陰影の大きさの比は、暗部ピクセルP3に生じた陰影の大きさに対するピクセルP4に生じた陰影の大きさの比と同一である。従って、上述した数式2に代えて、次の数式3
[数3]
Axsub=DP4/(DP3+DP4)
を用いて算出しても構わないし、両方の数式2,3により計算してその結果を重み付け加算平均する等により、精度を高めるようにしても構わない。
[数3]
Axsub=DP4/(DP3+DP4)
を用いて算出しても構わないし、両方の数式2,3により計算してその結果を重み付け加算平均する等により、精度を高めるようにしても構わない。
あるいはさらに、図11を見れば分かるように、暗部ピクセルP1に生じた陰影の大きさに対するピクセルP2に生じた陰影の大きさの比は、暗部ピクセルP1およびP3に生じた陰影の大きさに対するピクセルP2およびP4に生じた陰影の大きさの比とも同一である。従って、上述した数式2,3に代えて、次の数式4
[数4]
Axsub=(DP2+DP4)/(DP1+DP2+DP3+DP4)
を用いて算出しても良い。
[数4]
Axsub=(DP2+DP4)/(DP1+DP2+DP3+DP4)
を用いて算出しても良い。
続いて、暗部ピクセルP1からの全遮光マスク38Xの陰影のY方向のずれ量Aysubを、次の数式5
[数5]
Aysub=DP3/(DP1+DP3)
により算出する(ステップS13)。
[数5]
Aysub=DP3/(DP1+DP3)
により算出する(ステップS13)。
ただし、ここでも同様に、上述した数式5に代えて、次の数式6
[数6]
Aysub=DP4/(DP2+DP4)
を用いて算出しても構わないし、両方の数式5,6により計算してその結果を重み付け加算平均する等により、精度を高めるようにしても構わない。
[数6]
Aysub=DP4/(DP2+DP4)
を用いて算出しても構わないし、両方の数式5,6により計算してその結果を重み付け加算平均する等により、精度を高めるようにしても構わない。
さらに、上述した数式5,6に代えて、次の数式7
[数7]
Aysub=(DP3+DP4)/(DP1+DP2+DP3+DP4)
を用いて算出しても良い。
[数7]
Aysub=(DP3+DP4)/(DP1+DP2+DP3+DP4)
を用いて算出しても良い。
その後、ピクセル単位よりも小さい単位のX方向およびY方向のずれ量、すなわち、取得された全遮光マスク38Xの位置と、全遮光マスク38Xが配置されるべき第3の所定位置(ターゲットピクセルTPの位置)と、の差分(ΔX,ΔY)を、次の数式8
[数8]
ΔX=Apx+Axsub
ΔY=Apy+Aysub
により算出して(ステップS14)、図13に示した処理にリターンする。
[数8]
ΔX=Apx+Axsub
ΔY=Apy+Aysub
により算出して(ステップS14)、図13に示した処理にリターンする。
図13の処理に戻ると、算出された差分(ΔX,ΔY)を相殺する分だけ、撮像素子基板3Pに対して透明板37を平行移動する(ステップS9)。
これにより、撮像素子基板3Pと透明板37との位置合わせは完了したはずである。ただし、位置合わせが完了したことを検証するために、コリメータ光を照射して撮像を行い、その結果得られた画像信号中の、幾つかの、あるいは全ての、位置情報画素15の画素値が、設定通りにほぼ0の値になっているかどうかを検査しても良い。このときに設定通りの値が得られていれば位置合わせは完了し、設定通りの値が得られていない場合には、設定通りの値が得られていない位置情報画素15に特に着目して、上述したような処理を繰り返して行うことになる。あるいは、上述した処理を繰り返して行うのに代えて、コリメータ光を照射しつつ全遮光マスク38Xが位置するべき第3の画素14Pの出力値を継続的にモニタしながら、走査制御回路28からの現在の走査位置情報に基づき、ピックアップ部による2次元的な走査を画素よりも小さい単位で行って、ほぼ0の画素値が得られる位置へ合わせるようにしても構わない。設定通りの値が得られていない場合でも、画素単位での位置合わせはほぼ完了しているはずであるから、このような処理を行っても比較的短時間で位置合わせを行うことが可能である。
こうして位置合わせが完了したら、その後は、撮像素子基板3Pと透明板37とを例えば接着剤を用いて固定し、ピックアップ部の真空ポンプによる吸引を停止して、遮光マスクガラス移動装置22から透明板37を取り外す。
これにより焦点検出画素が所定の画素位置において正しく機能する撮像素子3が製造されたことになる。
続いて、図15は撮像装置の構成を示すブロック図である。
上述したように製造された撮像素子3が適用される本実施形態の撮像装置は、例えばAF機能を有するデジタルカメラ等として構成されたものであり、図15に示すように、結像光学系1と、撮像部2と、位相差検出部6と、フォーカス制御部7と、画像処理部10と、補間部11と、を備えている。
結像光学系1は、光学的な被写体像を撮像部2内の撮像素子3上に結像するための対物光学系であり、図示しない光学絞りや、焦点位置を調節するためのフォーカスレンズを含んで構成されている。
撮像部2は、上述した撮像素子3と、撮像素子駆動部4と、画素種別信号出力部5と、を備えている。
撮像素子駆動部4は、撮像素子3を駆動制御するものである。すなわち、撮像素子駆動部4は、水平同期信号HDと垂直同期信号VDとを撮像素子3へ出力して、該撮像素子3上に上述したように配列された複数の画素を所定の順序で駆動するようになっている。従って、画像信号は、読み出された画素順に、画素単位の画像信号(画素データ)として撮像素子3から出力されることになる。さらに、撮像素子駆動部4は、撮像素子3へ出力している水平同期信号HDおよび垂直同期信号VDに基づいて、撮像素子3から読み出されている画素位置の情報である読出位置情報を画素種別信号出力部5へ出力すると共に、相関演算を行うタイミングを示す相関タイミング信号を位相差検出部6へ出力するようになっている。
ここに、撮像素子駆動部4から画素種別信号出力部5へ出力される読出位置情報は、例えば、マトリクス状に配列された複数の画素の位置に対応した、所定のタイミングを有するパルス信号である。
また、撮像素子駆動部4は、上述したような制御信号(垂直同期信号、水平同期信号、読出位置情報、相関タイミング信号)のそれぞれを、図示しないレリーズボタンの操作に同期して出力するようになっている。
画素種別信号出力部5は、撮像素子駆動部4からの読出位置情報に基づいて、撮像素子3から画素単位で順次出力される画像信号の種類を示す画素種別信号を生成し、位相差検出部6へ出力する回路である。
ここに、画素種別信号は、焦点検出画素信号(位置情報画素信号も含む)と瞳種別信号とを含んでいる。前者の焦点検出画素信号は、撮像素子3から出力されている画素データが、位置情報画素15または焦点検出画素13A,13Bの信号であることを示す信号である。また、後者の瞳種別信号は、撮像素子3から出力されている画素データが、焦点検出画素の内の瞳A焦点検出画素13Aと瞳B焦点検出画素13Bとの何れの画素からのものであるかを示す信号である。
この画素種別信号出力部5は、例えば、読出位置情報のパルス信号をカウントするカウンタと、位置情報画素15および焦点検出画素13A,13Bの位置に対応する値を保持する記憶部と、を備えて構成されている。そして、画素種別信号出力部5は、カウント値が、位置情報画素15または焦点検出画素13A,13Bの位置に対応する所定値になったときに、焦点検出画素信号(位置情報画素信号も含む)を出力する。さらに、画素種別信号出力部5は、カウント値が、焦点検出画素13A,13Bの位置に対応する所定値であるときには、さらに瞳種別信号を出力する。
従って、撮像素子3から出力されている画像信号が、撮影画素14の信号である場合には焦点検出画素信号および瞳種別信号の何れも出力されず、位置情報画素15の信号である場合には焦点検出画素信号は出力されるが瞳種別信号は出力されず、焦点検出画素13A,13Bの信号である場合には焦点検出画素信号および瞳種別信号の両方が出力されることになる。
さらに、画素種別信号出力部5は、焦点検出画素信号を、補間部11へも出力するようになっている。
位相差検出部6は、撮像素子3からの画像信号と、画素種別信号出力部5からの画素種別信号と、撮像素子駆動部4からの相関タイミング信号とに基づいて、瞳A焦点検出画素13Aに結像されている被写体像(第1の画素群からの出力により形成される第1の画像)と、瞳B焦点検出画素13Bからの画像信号に結像されている被写体像(第2の画素群からの出力により形成される第2の画像)と、の位相差を検出し、検出結果を位相差信号としてフォーカス制御部7へ出力するものである。
フォーカス制御部7は、デフォーカス量算出部8とフォーカスレンズ駆動部9とを備えており、位相差検出部6により検出される位相差を0に近付けるように結像光学系1を駆動するものである。
すなわち、デフォーカス量算出部8は、位相差検出部6からの位相差信号に基づきデフォーカス量を算出して、フォーカスレンズ駆動部9へ出力する。
フォーカスレンズ駆動部9は、デフォーカス量算出部8により算出されたデフォーカス量に応じて、撮像素子3に結像される被写体像が合焦状態となるように、結像光学系1内のフォーカスレンズを駆動する。これにより、撮像装置のAF機能が実現される。撮像装置には図示しない操作部(例えば、デジタルカメラのレリーズボタン)が設けられており、この操作部からの操作信号により撮影処理の実行が指示されると、その実行時に焦点検出が行われてAF機能が実行される。
補間部11は、撮影処理の実行により得られた撮像素子3からの撮像信号に対して、画素種別信号出力部5からの焦点検出画素信号(位置情報画素信号も含む)に基づき、位置情報画素15および焦点検出画素13A,13Bの補間処理を行うものである。すなわち、位置情報画素15および焦点検出画素13A,13Bは、撮影用の画素として使用することができないために、この補間部11が、位置情報画素15および焦点検出画素13A,13Bの位置の画素データを、周囲の撮影画素14の画素データを用いて補間して生成する処理を行う。
画像処理部10は、補間部11により補間された画像信号に対して画像処理を行うものである。この画像処理部10により生成された画像データは、図示しない記録媒体等に記録されたり、図示しない表示装置に表示されたりするようになっている。
なお、位置合わせを短時間で行うためには、全遮光マスク38Xが複数設けられていることが望ましいが、全遮光マスク38Xが1つであっても位置合わせは可能である。このときには、遮光マスク38A,38Bを補助的に用いれば良い。すなわち、全遮光マスク38Xが位置するべき第3の画素14Pの出力画素値が0となり、全ての遮光マスク38A,38Bが位置するべき全ての第1,第2の画素14Pの出力画素値が1/2となるように位置合わせすれば良い。
また、上述では全遮光マスク38Xを透明板37の撮像素子基板3Pに対向する側の面に設けているが、これに代えて、全遮光マスク38Xを透明板37の撮像素子基板3Pに対向する側の面とは反対側の面に設けるとともに、さらに位置決めして取り付けた後に消去可能となるように形成すれば、位置情報画素15は再び撮影画素14として使用可能となり、補間部11による位置情報画素15の補間も不要となる利点がある。
このような実施形態1によれば、遮光マスク38A,38Bに対して所定の位置関係にある全遮光マスク38Xを設け、この全遮光マスク38Xが位置するべき第3の画素14P上に、全遮光マスク38Xが移動されるように位置合わせを行うことにより、遮光マスク38A,38Bが位置するべき第1,第2の画素14P上に該遮光マスク38A,38Bを、短時間で高精度に位置合わせすることが可能となる。
そして、全遮光マスク38Xを透明板37上に複数設けることにより、位置合わせに要する時間をより短縮することが可能となる。
さらに、全遮光マスク38Xを、透明板37上の周辺領域に設けることにより、画像の中央部に位置することが多い主要被写体の画質低下を防止することができる。加えて、複数の全遮光マスク38Xを、透明板37上に互いに離隔して設けることにより、位置合わせの精度を向上することができる。
また、全遮光マスク38Xを、透明板37の、撮像素子基板3Pと貼設される面とは反対側の面に設けて、位置合わせ後に消去する場合には、全遮光マスク38Xによる画質の低下が全く生じることのない利点がある。
なお、本発明は上述した実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化することができる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成することができる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除しても良い。さらに、異なる実施形態にわたる構成要素を適宜組み合わせても良い。このように、発明の主旨を逸脱しない範囲内において種々の変形や応用が可能であることは勿論である。
1…結像光学系
2…撮像部
3…撮像素子
3P…撮像素子基板
4…撮像素子駆動部
5…画素種別信号出力部
6…位相差検出部
7…フォーカス制御部
8…デフォーカス量算出部
9…フォーカスレンズ駆動部
10…画像処理部
11…補間部
13…瞳分割用遮光マスク領域
13A…瞳A焦点検出画素(第1の焦点検出画素)
13B…瞳B焦点検出画素(第2の焦点検出画素)
14…撮影画素
14P…画素
15…位置情報画素
21…コリメータ光源
22…遮光マスクガラス移動装置
23…撮像素子駆動部
24…位置情報画素分離タイミングデコーダ
25…位置情報画素ホールド回路
26…最小値位置検出回路
27…位置決制御部
28…走査制御回路
31…半導体基板
32…フォトダイオード
33,34…配線パターン
35…マイクロレンズ
37…透明板
38A…第1の遮光マスク
38B…第2の遮光マスク
38X…全遮光マスク
2…撮像部
3…撮像素子
3P…撮像素子基板
4…撮像素子駆動部
5…画素種別信号出力部
6…位相差検出部
7…フォーカス制御部
8…デフォーカス量算出部
9…フォーカスレンズ駆動部
10…画像処理部
11…補間部
13…瞳分割用遮光マスク領域
13A…瞳A焦点検出画素(第1の焦点検出画素)
13B…瞳B焦点検出画素(第2の焦点検出画素)
14…撮影画素
14P…画素
15…位置情報画素
21…コリメータ光源
22…遮光マスクガラス移動装置
23…撮像素子駆動部
24…位置情報画素分離タイミングデコーダ
25…位置情報画素ホールド回路
26…最小値位置検出回路
27…位置決制御部
28…走査制御回路
31…半導体基板
32…フォトダイオード
33,34…配線パターン
35…マイクロレンズ
37…透明板
38A…第1の遮光マスク
38B…第2の遮光マスク
38X…全遮光マスク
Claims (7)
- 光学的な被写体像を光電変換するための画素が、複数、2次元状に配列されるように、半導体製造プロセスにより形成された撮像素子基板と、
上記撮像素子基板に対して画素位置を合わせて貼設された透明板と、
を具備した撮像素子であって、
上記撮像素子基板に配列された複数の画素は、第1の所定位置にある第1の画素と、第2の所定位置にある第2の画素と、第3の所定位置にある第3の画素と、を含み、
上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第1の画素の中心から一方向へ偏心した部分を遮光するように設けられた第1の遮光マスクと、
上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第2の画素の中心から他方向へ偏心した部分を遮光するように設けられた第2の遮光マスクと、
上記透明板上に、該透明板が上記撮像素子基板に画素位置を合わせて貼設された際に、上記第3の画素を全遮光するように設けられた全遮光マスクと、
をさらに具備し、
上記第1の画素および上記第1の遮光マスクの組が第1の焦点検出画素を、上記第2の画素および上記第2の遮光マスクの組が第2の焦点検出画素を、上記第3の画素および上記全遮光マスクの組が位置情報画素を、それぞれ構成することを特徴とする撮像素子。 - 上記全遮光マスクは、上記透明板上に複数設けられていることを特徴とする請求項1に記載の撮像素子。
- 複数の上記全遮光マスクは、上記透明板上の周辺領域に、互いに離隔して設けられていることを特徴とする請求項2に記載の撮像素子。
- 上記全遮光マスクは、上記透明板の、上記撮像素子基板と貼設される面とは反対側の面に、消去可能に設けられたものであることを特徴とする請求項1から請求項3の何れか一項に記載の撮像素子。
- 請求項1に記載の撮像素子と、
上記撮像素子上に被写体像を形成する結像光学系と、
上記第1の焦点検出画素からの出力により形成される第1の画像と、上記第2の焦点検出画素からの出力により形成される第2の画像と、の位相差を検出する位相差検出部と、
を具備したことを特徴とする撮像装置。 - 上記結像光学系は、焦点位置を調節可能であり、
上記位相差検出部により検出される位相差を0に近付けるように上記結像光学系を駆動するフォーカス制御部をさらに具備したことを特徴とする請求項5に記載の撮像装置。 - 請求項2に記載の撮像素子を製造するための方法であって、
上記撮像素子基板に対して上記透明板を配置し、透明板が配置された撮像素子基板に平行光を照射して、該撮像素子基板により第1の撮像を行うステップと、
上記第1の撮像により上記撮像素子基板から得られた画像信号に基づき、上記全遮光マスクの陰影が形成された全遮光マスク位置を、少なくとも2つ取得するステップと、
取得された2つの全遮光マスク位置を結ぶ直線と、該2つの全遮光マスクが配置されるべき2つの上記第3の所定位置を結ぶ直線と、がなす傾き角を算出するステップと、
上記傾き角を0にするように、上記撮像素子基板に対して上記透明板を回転するステップと、
上記透明板の回転が終了した後の撮像素子基板に平行光を照射して、該撮像素子基板により第2の撮像を行うステップと、
上記第2の撮像により上記撮像素子基板から得られた画像信号に基づき、少なくとも1つの上記全遮光マスクの陰影が形成された全遮光マスク位置を取得するステップと、
上記取得された全遮光マスク位置と、該全遮光マスクが配置されるべき上記第3の所定位置と、の差分を算出するステップと、
上記差分を相殺するように、上記撮像素子基板に対して上記透明板を平行移動するステップと、
を含むことを特徴とする撮像素子の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011032009A JP2012175146A (ja) | 2011-02-17 | 2011-02-17 | 撮像素子、撮像装置、撮像素子の製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011032009A JP2012175146A (ja) | 2011-02-17 | 2011-02-17 | 撮像素子、撮像装置、撮像素子の製造方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012175146A true JP2012175146A (ja) | 2012-09-10 |
Family
ID=46977678
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011032009A Withdrawn JP2012175146A (ja) | 2011-02-17 | 2011-02-17 | 撮像素子、撮像装置、撮像素子の製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012175146A (ja) |
-
2011
- 2011-02-17 JP JP2011032009A patent/JP2012175146A/ja not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11282882B2 (en) | Focus detecting device and electronic device | |
| JP5552214B2 (ja) | 焦点検出装置 | |
| JP5169499B2 (ja) | 撮像素子および撮像装置 | |
| US10397547B2 (en) | Stereoscopic image pickup unit, image pickup device, picture processing method, control method, and program utilizing diaphragm to form pair of apertures | |
| JP5219865B2 (ja) | 撮像装置及び焦点制御方法 | |
| JP5664270B2 (ja) | 撮像素子および撮像装置 | |
| JP2012043939A (ja) | 撮像素子および撮像装置 | |
| US9160918B2 (en) | Focus control apparatus and method for performing focus control by phase difference detection, and image capturing apparatus | |
| CN102422216B (zh) | 测距装置以及摄像装置 | |
| JP2002165126A (ja) | 撮像装置及び撮像システム、並びに撮像方法 | |
| US9398199B2 (en) | Image capture apparatus capable of shifting electrical signal when center of gravity is shifted due to an eclipse of pupil area | |
| JP2011221254A (ja) | 撮像装置、固体撮像素子、撮像方法およびプログラム | |
| JP2008299184A (ja) | 撮像装置および焦点検出装置 | |
| JP2012113171A (ja) | 撮像装置およびその制御方法 | |
| US11297271B2 (en) | Image sensor and image capture apparatus | |
| JP6364259B2 (ja) | 撮像装置、画像処理方法、及び画像処理プログラム | |
| US12105404B2 (en) | Lens apparatus, image pickup apparatus, control method of lens apparatus, and storage medium | |
| JP5634614B2 (ja) | 撮像素子及び撮像装置 | |
| JP2012022147A (ja) | 位相差検出用情報取得装置、位相差検出装置、撮像装置 | |
| JP2012175144A (ja) | 撮像素子、撮像装置、撮像素子の製造方法 | |
| JP5698555B2 (ja) | 撮像素子、撮像装置 | |
| JP5447250B2 (ja) | 測距装置及び撮像装置 | |
| JP2012175146A (ja) | 撮像素子、撮像装置、撮像素子の製造方法 | |
| JP6234097B2 (ja) | 撮像装置およびその制御方法 | |
| JP2017138621A (ja) | デフォーカス量検出装置およびカメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |