JP2012175857A - エレベータ - Google Patents
エレベータ Download PDFInfo
- Publication number
- JP2012175857A JP2012175857A JP2011037066A JP2011037066A JP2012175857A JP 2012175857 A JP2012175857 A JP 2012175857A JP 2011037066 A JP2011037066 A JP 2011037066A JP 2011037066 A JP2011037066 A JP 2011037066A JP 2012175857 A JP2012175857 A JP 2012175857A
- Authority
- JP
- Japan
- Prior art keywords
- power
- elevator
- car
- contact
- battery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012544 monitoring process Methods 0.000 claims abstract description 19
- 230000003247 decreasing effect Effects 0.000 claims 2
- 230000007423 decrease Effects 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 10
- 238000001514 detection method Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000001172 regenerating effect Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 3
- 230000036461 convulsion Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000004378 air conditioning Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000010485 coping Effects 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 230000005674 electromagnetic induction Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Landscapes
- Elevator Control (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
- Elevator Door Apparatuses (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
Abstract
【解決手段】カウンタウエイトに設けられ、乗りかごが各階で着床したときに非接触給電装置23に対向して非接触給電装置23から供給される電力を受ける受電装置24と、この受電装置24を通じて得られる給電時の電力を監視する電力監視部32と、この電力監視部32によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御部35とを備える。
【選択図】 図2
Description
図1は第1の実施形態に係るエレベータの構成を示す図であり、2:1ローピンク形式のエレベータの構成が示されている。
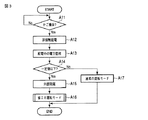
図3は第1の実施形態におけるエレベータの運転動作を示すフローチャートである。
次に、第2の実施形態を説明する。
次に、第3の実施形態について説明する。
Claims (6)
- 昇降路内を乗りかごと共に昇降動作するカウンタウエイトに非接触で電力を供給する非接触給電装置を備えたエレベータにおいて、
上記カウンタウエイトに設けられ、上記乗りかごが各階で着床したときに上記非接触給電装置に対向して上記非接触給電装置から供給される電力を受ける受電装置と、
この受電装置を通じて得られる給電時の電力を監視する電力監視手段と、
この電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転する運転制御手段と
を具備したことを特徴とするエレベータ。 - 上記非接触給電装置から供給される電力を蓄えるバッテリと、
このバッテリの残量を検出するバッテリ残量検出手段とを備え、
上記運転制御手段は、
上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合、あるいは、上記バッテリ残量検出手段によってバッテリ残量が一定値以下に低下している状態が検出された場合に、省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。 - 上記運転制御手段は、
上記乗りかごの運転方向と積載荷重に基づいて力行運転であるか否かを判断し、力行運転の場合に上記省エネ運転モードに切り替えて運転することを特徴とする請求項1記載のエレベータ。 - 上記受電装置内に設けられ、上記非接触給電装置から得られる電流値を検出する電流センサを備え、
上記電力監視手段は、
上記電流センサによって検出された電流値に基づいて給電時の電力を監視することを特徴とする請求項1記載のエレベータ。 - 上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、その旨を外部に発報する外部発報手段をさらに具備したことを特徴とする特徴とする請求項1記載のエレベータ。
- 上記電力監視手段によって電力が一定値以下に低下している状態が検出された場合に、上記乗りかごの着床位置を微調整する位置調整手段を備え、
上記運転制御手段は、
上記位置調整手段による調整動作で電力が上がった場合に、次回の運転から上記乗りかごを上記調整後の位置に着床させるように位置制御を行うことを特徴とする請求項1記載のエレベータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011037066A JP2012175857A (ja) | 2011-02-23 | 2011-02-23 | エレベータ |
| CN201110386658.7A CN102649522B (zh) | 2011-02-23 | 2011-11-29 | 电梯 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011037066A JP2012175857A (ja) | 2011-02-23 | 2011-02-23 | エレベータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012175857A true JP2012175857A (ja) | 2012-09-10 |
Family
ID=46691656
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011037066A Pending JP2012175857A (ja) | 2011-02-23 | 2011-02-23 | エレベータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2012175857A (ja) |
| CN (1) | CN102649522B (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013071796A (ja) * | 2011-09-27 | 2013-04-22 | Toshiba Elevator Co Ltd | エレベータの非接触給電システム |
| JP2014172705A (ja) * | 2013-03-08 | 2014-09-22 | Toshiba Elevator Co Ltd | エレベータ制御装置およびエレベータ制御方法 |
| CN104555680A (zh) * | 2014-12-29 | 2015-04-29 | 昆山京都电梯有限公司 | 一种可自动对蓄电池充电的电梯 |
| JP5882429B1 (ja) * | 2014-09-12 | 2016-03-09 | 東芝エレベータ株式会社 | 電源装置 |
| JP2018162113A (ja) * | 2017-03-24 | 2018-10-18 | 東芝エレベータ株式会社 | エレベータの非接触給電システム |
| WO2019106949A1 (ja) * | 2017-11-28 | 2019-06-06 | 株式会社日立製作所 | エレベーター及びエレベーター制御装置 |
| JP2019156545A (ja) * | 2018-03-09 | 2019-09-19 | 東芝エレベータ株式会社 | エレベータの非接触給電システム |
| WO2020194826A1 (ja) * | 2019-03-28 | 2020-10-01 | 株式会社日立製作所 | エレベーターシステム |
| CN113247717A (zh) * | 2020-02-13 | 2021-08-13 | 东芝电梯株式会社 | 电梯控制系统 |
| JP7336084B1 (ja) | 2022-07-07 | 2023-08-31 | フジテック株式会社 | エレベータにおけるカウンターウェイトの接近報知装置 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10135299B2 (en) * | 2015-08-25 | 2018-11-20 | Otis Elevator Company | Elevator wireless power transfer system |
| JP2018020899A (ja) * | 2016-08-05 | 2018-02-08 | 株式会社日立製作所 | エレベーターシステム |
| JP2018024496A (ja) * | 2016-08-09 | 2018-02-15 | 株式会社日立製作所 | エレベーター装置 |
| CN106655262B (zh) * | 2016-11-25 | 2019-01-18 | 上海工程技术大学 | 一种电梯能量回收无线充电系统 |
| JP6795462B2 (ja) * | 2017-06-15 | 2020-12-02 | 株式会社日立製作所 | エレベーター装置 |
| CN107473041A (zh) * | 2017-08-08 | 2017-12-15 | 曾美枝 | 一种安全电梯 |
| CN111051231B (zh) * | 2017-09-13 | 2022-03-29 | 三菱电机株式会社 | 电梯的控制装置和控制方法 |
| US20200195047A1 (en) * | 2018-12-14 | 2020-06-18 | Otis Elevator Company | Car to call point wireless power charging |
| US11670961B2 (en) | 2018-12-14 | 2023-06-06 | Otis Elevator Company | Closed loop control wireless power transmission system for conveyance system |
| CN110182668A (zh) * | 2019-06-10 | 2019-08-30 | 攀枝花攀钢集团设计研究院有限公司 | 室外太阳能电梯 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001163533A (ja) * | 1999-12-09 | 2001-06-19 | Hitachi Ltd | エレベーター |
| JP2002037546A (ja) * | 2000-07-24 | 2002-02-06 | Hitachi Ltd | エレベータ装置 |
| WO2002057171A1 (en) * | 2001-01-19 | 2002-07-25 | Hitachi, Ltd. | Elevator |
| JP2002338147A (ja) * | 2001-05-16 | 2002-11-27 | Mitsubishi Electric Corp | エレベータ装置およびその運転方法 |
| JP2003209903A (ja) * | 2001-11-07 | 2003-07-25 | Tsubakimoto Chain Co | 非接触給電装置及び非接触給電システム |
| JP2005029291A (ja) * | 2003-07-07 | 2005-02-03 | Hitachi Ltd | テールコードレスエレベータ |
| JP2006193275A (ja) * | 2005-01-13 | 2006-07-27 | Mitsubishi Electric Corp | エレベーター乗りかごの電力供給装置 |
| JP2007153574A (ja) * | 2005-12-07 | 2007-06-21 | Mitsubishi Electric Corp | エレベータ装置 |
| JP2009286635A (ja) * | 2007-04-13 | 2009-12-10 | Hitachi Ltd | エレベータ乗りかごの電力制御装置 |
| JP2010148210A (ja) * | 2008-12-17 | 2010-07-01 | Nippon Soken Inc | 非接触給電回路及び誘導式電源回路 |
| JP2010149989A (ja) * | 2008-12-25 | 2010-07-08 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ |
| JP2011026034A (ja) * | 2009-07-22 | 2011-02-10 | Mitsubishi Electric Corp | エレベータの群管理制御方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002211855A (ja) * | 2001-01-12 | 2002-07-31 | Mitsubishi Electric Corp | エレベータの制御装置 |
| JP4927277B2 (ja) * | 2001-09-28 | 2012-05-09 | 東芝エレベータ株式会社 | エレベータ |
| JP4727166B2 (ja) * | 2004-05-13 | 2011-07-20 | 三菱電機株式会社 | エレベータの制御装置 |
-
2011
- 2011-02-23 JP JP2011037066A patent/JP2012175857A/ja active Pending
- 2011-11-29 CN CN201110386658.7A patent/CN102649522B/zh active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001163533A (ja) * | 1999-12-09 | 2001-06-19 | Hitachi Ltd | エレベーター |
| JP2002037546A (ja) * | 2000-07-24 | 2002-02-06 | Hitachi Ltd | エレベータ装置 |
| WO2002057171A1 (en) * | 2001-01-19 | 2002-07-25 | Hitachi, Ltd. | Elevator |
| JP2002338147A (ja) * | 2001-05-16 | 2002-11-27 | Mitsubishi Electric Corp | エレベータ装置およびその運転方法 |
| JP2003209903A (ja) * | 2001-11-07 | 2003-07-25 | Tsubakimoto Chain Co | 非接触給電装置及び非接触給電システム |
| JP2005029291A (ja) * | 2003-07-07 | 2005-02-03 | Hitachi Ltd | テールコードレスエレベータ |
| JP2006193275A (ja) * | 2005-01-13 | 2006-07-27 | Mitsubishi Electric Corp | エレベーター乗りかごの電力供給装置 |
| JP2007153574A (ja) * | 2005-12-07 | 2007-06-21 | Mitsubishi Electric Corp | エレベータ装置 |
| JP2009286635A (ja) * | 2007-04-13 | 2009-12-10 | Hitachi Ltd | エレベータ乗りかごの電力制御装置 |
| JP2010148210A (ja) * | 2008-12-17 | 2010-07-01 | Nippon Soken Inc | 非接触給電回路及び誘導式電源回路 |
| JP2010149989A (ja) * | 2008-12-25 | 2010-07-08 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ |
| JP2011026034A (ja) * | 2009-07-22 | 2011-02-10 | Mitsubishi Electric Corp | エレベータの群管理制御方法 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013071796A (ja) * | 2011-09-27 | 2013-04-22 | Toshiba Elevator Co Ltd | エレベータの非接触給電システム |
| JP2014172705A (ja) * | 2013-03-08 | 2014-09-22 | Toshiba Elevator Co Ltd | エレベータ制御装置およびエレベータ制御方法 |
| JP5882429B1 (ja) * | 2014-09-12 | 2016-03-09 | 東芝エレベータ株式会社 | 電源装置 |
| CN104555680A (zh) * | 2014-12-29 | 2015-04-29 | 昆山京都电梯有限公司 | 一种可自动对蓄电池充电的电梯 |
| JP2018162113A (ja) * | 2017-03-24 | 2018-10-18 | 東芝エレベータ株式会社 | エレベータの非接触給電システム |
| JPWO2019106949A1 (ja) * | 2017-11-28 | 2020-10-22 | 株式会社日立製作所 | エレベーター及びエレベーター制御装置 |
| WO2019106949A1 (ja) * | 2017-11-28 | 2019-06-06 | 株式会社日立製作所 | エレベーター及びエレベーター制御装置 |
| CN111212801A (zh) * | 2017-11-28 | 2020-05-29 | 株式会社日立制作所 | 电梯以及电梯控制装置 |
| JP2019156545A (ja) * | 2018-03-09 | 2019-09-19 | 東芝エレベータ株式会社 | エレベータの非接触給電システム |
| WO2020194826A1 (ja) * | 2019-03-28 | 2020-10-01 | 株式会社日立製作所 | エレベーターシステム |
| JPWO2020194826A1 (ja) * | 2019-03-28 | 2021-12-23 | 株式会社日立製作所 | エレベーターシステム |
| JP7138773B2 (ja) | 2019-03-28 | 2022-09-16 | 株式会社日立製作所 | エレベーターシステム |
| CN113247717A (zh) * | 2020-02-13 | 2021-08-13 | 东芝电梯株式会社 | 电梯控制系统 |
| JP2021127210A (ja) * | 2020-02-13 | 2021-09-02 | 東芝エレベータ株式会社 | エレベータ制御システム |
| CN113247717B (zh) * | 2020-02-13 | 2023-03-31 | 东芝电梯株式会社 | 电梯控制系统 |
| JP7336084B1 (ja) | 2022-07-07 | 2023-08-31 | フジテック株式会社 | エレベータにおけるカウンターウェイトの接近報知装置 |
| JP2024008019A (ja) * | 2022-07-07 | 2024-01-19 | フジテック株式会社 | エレベータにおけるカウンターウェイトの接近報知装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102649522B (zh) | 2015-06-17 |
| CN102649522A (zh) | 2012-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012175857A (ja) | エレベータ | |
| EP2318300B1 (en) | Method for operating an elevator in an emergency mode | |
| JP5733917B2 (ja) | エレベータ電力供給システム | |
| JP5473883B2 (ja) | エレベータ装置 | |
| JP6687173B1 (ja) | エレベータ用ワイヤレス給電システムおよびエレベータシステム | |
| JP5800650B2 (ja) | エレベータの非接触給電システム | |
| EP2576406B1 (en) | Method for limiting the loading of an elevator assembly, and an elevator assembly | |
| EP3431433A2 (en) | Elevator car power supply system | |
| EP2800718B1 (en) | Battery mounting in elevator hoistway | |
| US7637353B2 (en) | Control device for elevator | |
| EP3447016B1 (en) | Power system for vertical transportation, method and vertical transportation arrangements | |
| JP5777426B2 (ja) | エレベータ | |
| JP5800638B2 (ja) | エレベータの非接触給電システム | |
| JP2013060262A (ja) | エレベータ | |
| JP2013047137A (ja) | エレベータの非接触給電システム | |
| JP4632795B2 (ja) | エレベーター乗りかごの電力供給装置 | |
| JP2012184049A (ja) | エレベータ | |
| EP3670417A1 (en) | Car to call point wireless power charging | |
| JP2013049511A (ja) | エレベータの非接触給電システム | |
| EP3666704B1 (en) | Car to car wireless power transfer | |
| JP5764838B2 (ja) | エレベータのドアシステム | |
| EP3715303B1 (en) | Multi-shaft power charging | |
| EP3730444A1 (en) | Closed loop control wireless power transmission system for conveyance system | |
| CN102485627A (zh) | 一种运载装置和运载系统 | |
| EP1721856B1 (en) | Elevator controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130709 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20130709 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140218 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140617 |