JP2012176182A - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP2012176182A JP2012176182A JP2011041382A JP2011041382A JP2012176182A JP 2012176182 A JP2012176182 A JP 2012176182A JP 2011041382 A JP2011041382 A JP 2011041382A JP 2011041382 A JP2011041382 A JP 2011041382A JP 2012176182 A JP2012176182 A JP 2012176182A
- Authority
- JP
- Japan
- Prior art keywords
- sewing
- feed
- needle
- feed amount
- thread
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Sewing Machines And Sewing (AREA)
Abstract
【課題】針糸残り長さが短くても、縫針に負荷をかけることなく縫製開始時の糸抜けを防止できるミシンを提供する。
【解決手段】ミシンの使用時において、作業者は布10に生じる「鳥の巣」を軽減する為に針糸残り長さを極力短くする。ミシンの縫い目形成動作により布10の裏側に引き込まれる上糸量は少なくなる。本実施形態のミシンは縫製開始時の布送りの送り量を通常よりも大きくする。上糸8Aの一部が屈曲し、該屈曲部分Qは基準送り量に対してすばやく押え足15の下に潜り混むことが可能となる。上糸8Aは押え足15によって屈曲部分Qが踏まれた状態であるため上糸の布側の抵抗が大きくなり天秤により引き上げられても、糸抜けを確実に防止できる。
【選択図】図8
【解決手段】ミシンの使用時において、作業者は布10に生じる「鳥の巣」を軽減する為に針糸残り長さを極力短くする。ミシンの縫い目形成動作により布10の裏側に引き込まれる上糸量は少なくなる。本実施形態のミシンは縫製開始時の布送りの送り量を通常よりも大きくする。上糸8Aの一部が屈曲し、該屈曲部分Qは基準送り量に対してすばやく押え足15の下に潜り混むことが可能となる。上糸8Aは押え足15によって屈曲部分Qが踏まれた状態であるため上糸の布側の抵抗が大きくなり天秤により引き上げられても、糸抜けを確実に防止できる。
【選択図】図8
Description
本発明は、ミシンに関する。
工業用ミシンは加工布に縫目を形成する。作業者は、縫い始めの縫い目の形成を失敗する(糸抜け)ことを防ぐために、縫製開始時において縫針の目孔から延びる端部側上糸残量(針糸板残り長さ)を3cm以上は確保していた。しかしながら、この上糸端が生地裏に残り、2針目以降の縫い目に縫い込まれ「鳥の巣」状態となる。特許文献1が開示するミシンは、縫針が加工布に貫通した状態で、微小所定量だけ布送り方向へ布送りする。その結果、天秤側上糸部分の加工布に対する布抵抗よりも、端部側上糸部分の加工布に対する布抵抗の方が大きくなる。
特許文献1が開示するミシンは、縫針が加工布に貫通した状態で布送りするので、縫針に負荷がかかる。縫針に負荷がかかると、加工布に対する縫針の位置にずれが生じてしまい、綺麗な縫い目を形成できないという問題点があった。
本発明の目的は、針糸残り長さが短くても、縫針に負荷をかけることなく縫製開始時の糸抜けを防止できるミシンを提供することである。
本発明の第1態様に係るミシンは、上糸が通過する孔を有し且つ上下動する縫針と、被縫製物を載置し且つ前記縫針を通す穴を有する針板と、前記被縫製物を前記針板上で押さえる布押えと、前記針板上で前記布押えと協働して前記被縫製物を送る送り歯と、前記縫針の上下動に同期して前記送り歯を駆動する送り機構と、前記送り機構における前記縫針の上下動の一周期あたりの前記被縫製物の送り量を調整可能な送り量調整手段とを備えたミシンであって、前記送り機構による前記被縫製物の送り量を調整するよう前記送り量調整手段を駆動する調整駆動手段と、縫製開始時に、予め設定された前記被縫製物の送り量である基準量より送り量を大きくするよう前記調整駆動手段を制御する制御手段とを備えている。
第1態様に係るミシンでは、縫製開始時に、予め設定された被縫製物の基準量より送り量を大きくする。糸の一部が屈曲する。屈曲部分は被縫製物と布押えとの間に潜り込む。布押さえは糸の屈曲部分を押さえている。故に、第1態様は縫針に負荷をかけることなく縫製開始時の糸抜けを防止できる。
また、第1態様において、前記制御手段は、縫製開始から所定の針数を縫製した後、前記基準量に調整するよう前記調整駆動手段を制御してもよい。故に、縫製開始に縫目を確実に形成できる。
また、第1態様において、前記制御手段は、縫製開始から前記所定の針数を縫製した後、前記送り歯が前記針板よりも下方に位置する場合に、前記基準量に調整するよう前記調整駆動手段を制御してもよい。被縫製物を送っている途中で基準量に戻ることがないので、被縫製物に縫目を綺麗に形成できる。
また、第1態様において、縫製開始から前記縫針が前記被縫製物に最初に刺さるのを1針目とした場合に、前記所定の針数は少なくとも2針としてもよい。少なくとも2針を縫製するまでの送り量を大きくすることで、糸の一部を屈曲させ、当該屈曲部分を布押さえで押さえることができるので、縫製開始時の糸抜けを確実に防止できる。
以下、本発明の一実施形態であるミシン1について、図面を参照して説明する。参照する図面は、本開示が採用し得る技術的特徴を説明する為に用いるものであり、記載している装置の構成、及びフローチャート等は、それのみに限定する趣旨ではなく、単なる説明例である。図2、図8中に示すx方向は、布10の正送り方向を示している。以下説明において、図2に示す縫針14の目孔14Aから延びる上糸8Aの自由端側の残りの長さを「針糸残り長さ」という。本実施形態のミシン1は、縫製開始時の針糸残り長さを短くしても糸抜けを確実に防止できる点に特徴を有する。
ミシン1の物理的構成について、図1を参照して説明する。図1の左側、右側、左斜め上方、右斜め下方を、ミシン1の左側、右側、後方、前方とする。ミシン1は、テーブル6に設けられた凹部(図示略)に嵌め込まれている。テーブル6の下面には、ミシン1の動作を制御する制御装置70が取り付けられている。制御装置70には、ロッド90を介して、踏み込み式のペダル91が接続されている。作業者がペダル91をつま先側に踏み込み、又は踵側に踏み込むことにより、スイッチ(図示略)が適宜ON、OFFされ、ミシン1における縫製作業の開始、停止、又は糸切り機構による糸切り作業等が行われる。
図1に示すように、ミシン1は、土台となるベッド部2と、該ベッド部2の上面の右端部に鉛直方向に立設された柱状の脚柱部3と、該脚柱部3の上端部から左側方に延設され、かつ前記ベッド部2の上面に対向するアーム部4とを備えている。アーム部4の延設方向の先端部には、下方に突出する頭部49が設けられている。
ベッド部2の上面左端側には、針板11が設けられている。図2に示すように、針板11において縫針14の直下には、針穴11Aが設けられている。さらに針板11には、後述する送り歯32が上下方向に出退する角穴12が設けられている。ベッド部2内における針板11の下方には、釜機構30が設けられている。釜機構30は、下糸用ボビン(図示略)を収容する。釜機構30の上方であって且つ針板11の下方には、縫製対象物(以下、一例として図2中の布10とする)を所定の送り量でミシン1の後方(正送り方向)及び前方(逆送り方向)の何れかに移送する送り歯32が設けられている。送り歯32は、後述する布送り機構によって駆動する。
図1に示すように、脚柱部3の右側面の上部には、ミシン1の上軸(図示略)を手動で回転させる円柱状のプーリ5を持つミシンモータ87(図4参照)が設けられている。脚柱部3の前面の中央部には、送り歯32による布10の送り量を調節する為の送り量調節プーリ21が設けられている。脚柱部3の右側面の下部には、パルスモータである送り量調節用モータ22が固定部材25を介して固定されている。送り量調節用モータ22の出力軸22A(図3参照)の先端部には、駆動プーリ23が固定されている。送り量調節プーリ21と駆動プーリ23とには、タイミングベルト24が架け渡されている。送り量調節用モータ22は、後述する駆動回路83(図4参照)を介して制御装置70(図1、図4参照)に接続されている。制御装置70は、送り量調節用モータ22の駆動を制御する。送り量調節用モータ22の駆動力は、駆動プーリ23からタイミングベルト24を介して送り量調節プーリ21に伝達される。故に、送り量調節プーリ21の回転に伴って布10の送り量が調節される。布10の送り量の調節機構については後述する。布の送り量は、後述する操作パネル7で設定可能である。なお、送り量調節プーリ21、送り量調節用モータ22、駆動プーリ23、及びタイミングベルト24が本発明の「調整駆動手段」に相当する。
図1、図2に示すように、頭部49の下部には、針棒13が上下方向に移動可能に設けられている。針棒13の下端には、縫針14が装着されている。針棒13の後方には、布を押さえる為の押え足15が設けられている。頭部49内には、針棒13を上下動する針棒上下動機構(図示略)と、上糸8Aを引き上げる天秤18(図1参照)を上下動させる天秤機構(図示略)とが設けられている。
図1に示す脚柱部3の下方には、ミシン1を駆動するミシンモータ87(図4参照)が設けられている。ミシンモータ87の駆動力は、継ぎ手(図示略)を介して上軸(図示略)に伝達される。上軸は、アーム部4内において左右方向に延設されている。ミシンモータ87の駆動力は、上軸の途中に設けられた伝達機構(図示略)によって、下軸(図示略)にも伝達される。下軸は、ベッド部2内において左右方向に延設されている。作業者が、ペダル91を踏み込むとミシンモータ87が駆動し、針棒13と、天秤機構と、釜機構30と、送り機構とを含む各要素が同期駆動し、布10に縫い目が形成される。
図1に示すように、アーム部4の上面中央には、正面視横長の長方形状の操作パネル7が設けられている。操作パネル7の前面には、液晶ディスプレイ7A(以下、LCD7Aという)が設けられている。LCD7Aには、縫製模様の選択及び編集、縫製時の布の送り量の設定等の縫製作業に必要な各種機能を実行させる機能名及び各種のメッセージ等が表示される。LCD7Aの前面にはタッチパネル7Bが設けられている。LCD7A、及びタッチパネル7Bは、制御装置70に接続されている。作業者はLCD7Aに表示された項目を指又はタッチペンで選択する。タッチパネル7Bは選択された項目を感知する。作業者はLCD7A及びタッチパネル7Bを介してミシン1に種々の指示を入力できる。
縫針14の運動軌跡と上軸の位相との関係について、図7を参照して説明する。縫針14の上死点を上軸の0°の回転位相とする。縫針14は0°から360°の回転位相に渡って上下に往復運動する。約110°の回転位相のときは、縫針14の先端部が針板11の針穴11A(図2参照)に入るタイミングである。180°の回転位相のときは、縫針14が下死点に到達するタイミングである。約201°の回転位相のときは、釜機構30の剣先(図示略)と出会うタイミングである。約250°の回転位相のときは、縫針14の先端部が針板11の針穴11Aから上方に抜け出るタイミングである。360°の回転位相のときは、縫針14が上死点に戻るタイミングである。上軸角度が0°から360°で1周期となる。
これら種々のタイミングを検出する為に、細い多数の線を放射状に印刷したエンコーダディスク(図示略)を上軸に固定している。エンコーダディスクに印刷した個々の細線を検出してタイミング信号を発生するエンコーダ88(図4参照)を、アーム部4の内部に取り付けている。エンコーダ88が出力する信号(エンコーダパルス)は、制御装置70のRAM73(図4参照)のパルス数メモリに更新して記憶する。エンコーダパルス数は、上軸の1回転毎にリセットする。
縫針14の運動軌跡と天秤18の運動軌跡との関係について、図7を参照して説明する。縫針14が布10に突入すると、天秤18(図1参照)は下に移動して上糸8Aに余裕を持たせる。上糸8Aにループが形成される。そのループの中に釜機構30の内釜が抜けて下糸(図示略)が通る。縫針14が布10から抜かれると、天秤18は上に移動して上糸8Aを引き上げる。上糸8Aと下糸の交絡は布10の真中に位置する。このように、縫針14の上下動と、天秤18の上下動との協働によって、布10に縫い目が形成される。
布送り機構について、図2を参照して簡単に説明する。本実施形態の布送り機構は、送り歯32を駆動する従来の周知の機構である。例えば、送り歯32には、ベッド部2に両端部を回転自在に支持された水平送り軸(図示略)にて後進(図2中x方向)、前進運動が与えられる。送り歯32を固着した送り台(図示略)と連動する上下送り軸(図示略)にて上下運動が与えられる。このような周知の手段によって布10を前後方向に送ることができる。布10の送り方向の切り替えは、ベッド部2内に設けられた切替器(図示略)の傾きによって決定される。切替器の傾きによって布10が逆送り方向(図2中のx方向とは逆方向)に送られ、返し縫い等が行われる。
切替器の傾きを調節する周知の機構について簡単に説明する。図1に示すベッド部2は内部に逆転ソレノイド58(図4参照)と、ソレノイドレバー(図示略)と、返し縫いレバー軸(図示略)と、レバー(図示略)と、切替器連捍組(図示略)を備えている。逆転ソレノイド58がONすると、ソレノイドレバー(図示略)を介して返し縫いレバー軸が回動する。返し縫いレバー軸の回動に応じてレバー(図示略)が揺動し、切替器連捍組(図示略)が上下方向に揺動する。これにより、切替器の傾きが対称位置に変化し、布10の送り方向が正送り方向から逆送り方向へ切り替わる。このとき布10の送り量は変化しない。返し縫いレバー軸には、脚柱部3の前面の下側に配置された返し縫いレバー9(図1参照)が連結されている。返し縫いレバー9を下方へ手動操作することによっても、返し縫いレバー軸が回動されて切替器の傾きが対称位置に変化し、布10が逆送り方向へ送られる。
布10の送り量の調節機構について、図3を参照して説明する。脚柱部3内において、送り量調節プーリ21に相対する位置では、送り調節カム50が軸54を支点として回動可能に軸支されている。送り調節カム50は、リンク56を介して、送り調節台57に連結されている。送り調節台57はリンク(図示略)を介して切替器に連結した周知のものであり、ベッド部2内に回動可能に設けられている。リンク56の上下動により送り調節台57が回動し切替器の傾きが変化する。切替器の傾き角の変化により水平送り軸(図示略)の揺動量を変化させて、送り歯32(図2参照)による送り量を変動させる。
送り調節カム50の前端部には、側面視V字状のカム面51が形成されている。送り調節カム50の後端部には、上記の切替器連捍組を構成する要素であるリンク56の上端部が回動可能に連結されている。脚柱部3の前面の上部に設けられた螺子孔3Aには、送り量調節プーリ21の中心から後方に突出する調節軸41が螺合されている。調節軸41の先端部42は、送り調節カム50のカム面51に係合する。
カム面51は、下側に位置する正送り制御面52と、上側に位置する逆送り制御面53とを備えている。リンク56はバネにより図3の下方に付勢されており、正送り制御面52を調節軸41の先端部42に付勢している。調節軸41をまわすと調節軸41が出没し先端部42の正送り制御面52への当接位置が変化し、リンク56を介して切替器の遥動角度が変化する。このため、送り歯32による1ピッチの送り量を調節できる。
このような送り調節カム50を用いた構造は従来と同じである。
このような送り調節カム50を用いた構造は従来と同じである。
図3は逆転ソレノイド58(図4参照)がOFFした状態を示している。調節軸41の先端部42は、正送り制御面52に当接する。逆転ソレノイド58がONした状態では、リンク56がバネ力に抗して上昇し調節軸41の先端部42は、逆送り制御面53に接触する。このとき切替器の遥動角度は正送りの角度から逆送り角度に切り替わり、送り歯32の送り方向が逆転する。なお、布10の送り量の調節機構が本発明の「送り量調整手段」に相当する。
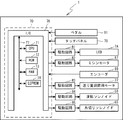
ミシン1の電気的構成について、図4を参照して説明する。上述したように、ミシン1は、制御装置70を備えている。制御装置70は、CPU71(本発明の「制御手段」に相当)を備えている。CPU71には、ROM72、RAM73、EEPROM(登録商標)74、及びI/Oインターフェース(以下、I/Oという)76が、バス77を介して接続されている。このような構成を有する制御装置70のI/O76には、ペダル91と、タッチパネル7Bと、LCD7Aを駆動する為の駆動回路81と、ミシンモータ87を駆動する為の駆動回路82と、送り量調節用モータ22を駆動する為の駆動回路83と、逆転ソレノイド58を駆動する為の駆動回路84と、糸切りソレノイド65を駆動する為の駆動回路85と、上軸の回転角度を検出するエンコーダ88等が各々接続されている。
ミシン1における縫製処理について、図5、図6のフローチャートと、図7〜図9とを参照して説明する。図7では、縫針14の運動軌跡と、天秤18の運動軌跡とを実線で示し、送り歯32の上下送りの位相を点線で示し、送り歯32の水平送りの位相を2点鎖線で示している。さらに、送り歯32の動作については、水平送りの位相と、上下送りの位相とに分けて示している。作業者がミシン1の電源をONすると、CPU71がROM72に記憶された「縫製制御プログラム」を呼び出して本処理を実行する。なお、縫製開始前においては、作業者は、布10に生じる「鳥の巣」を軽減する為に、針糸残り長さを極力短く(例えば、15mm程度)しておく。
CPU71は、送りデータが入力されたか否か判断する(S11)。送りデータは、布10の基準送り量(M)と、縫製開始時に基準送り量(M)を拡大させる拡大率(S)と、基準送り量(M)に拡大率(S)を乗じた拡大送り量(MS)を基準送り量(M)に戻す契機となる針数(N)とである。作業者は、縫製開始前に送りデータ(M、S、N)を操作パネル7で制御装置70に入力する。例えば、基準送り量(M)を3mm、拡大率(S)を1.6、針数(N)を2とする。この場合、拡大送り量(MS)は4.8mmとなる。この入力例では、縫製1針目で送り量を4.8mmに設定し、2針目で送り歯32が針板11よりも下方に移動したら3mmに復帰させるように、ミシン1を制御する。
CPU71は、送りデータが入力されたと判断するまで(S11:NO)、S11に戻り、待機状態となる。CPU71は、送りデータが入力されたと判断した場合(S11:YES)、入力された送りデータをRAM73に記憶する(S12)。CPU71は、全ての送りデータ(M、S、N)の入力が完了したか否か判断する(S13)。CPU71は、まだ入力されていない送りデータがあると判断した場合(S13:NO)、S11に戻り、残りの送りデータが入力されるまで待機状態となる。ミシン1は、送りデータが入力されなければ駆動しない。
CPU71は、全ての送りデータの入力が完了したと判断した場合(S13:YES)、ペダル91がONされたか否か判断する(S14)。CPU71は、ペダル91がONされるまでは(S14:NO)、S14に戻って待機状態となる。作業者は、縫製を開始する為に、ペダル91をつま先側に踏み込んでONする。CPU71は、ペダル91がONされたと判断した場合(S14:YES)、ミシンモータ87の駆動を開始する(S15)。ミシン1は縫製動作を開始する。例えば、図7に示すように、上軸が45°付近でミシン1が縫製動作を開始した場合、CPU71は、RAM73に記憶した基準送り量(M)で布10をX方向に送りつつ縫針14を下降させる。
CPU71は、縫針14が布10に刺さる1針目に突入したか否か判断する(S17)。ここでは、縫針14が針板11に到達する上軸角度=110°に到達したか否か判断する。CPU71は、1針目に突入するまでは(S17:NO)、そのまま基準送り量(M)で布10を正送り方向に送る。
CPU71は、縫針14が1針目に突入したと判断した場合(S17:YES)、送り量拡大処理を行う(S16)。送り量拡大処理では、CPU71は、RAM73に記憶した送り量(M)に、RAM73に記憶した拡大率(S)を乗じて拡大送り量(MS)を算出する。CPU71は、布10の送り量が基準送り量(M)から拡大送り量(MS)となるように、送り量調節用モータ22(図4参照)を駆動する。EEPROM74は、送り量調節用モータ22の回転位相と、送り量との対応関係を設定した送りテーブル(図示略)を記憶している。故に、CPU71は、送りテーブルを参照して、送り量調節用モータ22の駆動を制御することによって送り量を調節する。送り量調節用モータ22の駆動力は、駆動プーリ23からタイミングベルト24を介して送り量調節プーリ21に伝達される。送り量調節プーリ21の回転に伴って調節軸41が回転する。調節軸41は回転に伴って後方に移動する。先端部42の正送り制御面52への当接位置が変化し、リンク56を介して切替器の揺動角度が変化する。故に、CPU71は、送り量調節用モータ22の回転位相を制御することで、切替器の揺動角度が変化するので、送り歯32による1ピッチの送り量を拡大送り量(MS)に調節できる。
縫針14は針板11から引き上げられる。次いで送り歯32は針板11より上方に移動し、かつ正送り方向に拡大送り量(MS)移動する。布10は正送り方向に拡大送り量(MS)で移送される。このとき、図8、図9に示すように、上糸8Aの一部(図9中Q部分)が正送り方向へ屈曲する。屈曲部分Qは、布10と押え足15との間に潜り混む。上糸8Aは、押え足15によって踏まれた状態となる。
ここで、縫針14は上軸角度が360°を過ぎると再び下降する(図7参照)。図8、図9に示すように、天秤を中心として主調子側の糸抵抗と布側の糸抵抗において糸抵抗の小さい方の糸を引き上げる。縫い始めにおいて布側の糸抵抗は主調子側の糸抵抗と比較して大変小さいため、布側の上糸をすばやく引き上げる。この際の糸の慣性モーメントにより天秤の静的な引き上げ量以上の上糸を引き上げることになる。基準送り量で縫製するよりも素早く上糸8Aは押え足15によって屈曲部分Qは踏まれた状態になる。それ故、前記慣性モーメントに対抗した抵抗が大きくなり糸抜けを確実に防止できる。
図5のフローに戻り、CPU71は、ペダル91はONか否か判断する(S18)。作業者は、縫製作業を中止する場合、ペダル91から足を離してOFFする。CPU71は、ペダル91がOFFされたと判断した場合(S18:NO)、ミシンモータ87の駆動を停止し(S20)、縫製処理を終了する。
一方、CPU71は、ペダル91は引き続きONであると判断した場合(S18:YES)、縫針14はN針目に突入したか否か判断する(S19)。本実施例では、RAM73に記憶された針数Nは2である。故に、本実施例では、CPU71は、縫針14は2針目に突入したか否か判断する(S19)。CPU71は、2針目に突入するまでは(S19:NO)、S18に戻り、ペダル91がONされている間は(S18:YES)、縫製動作を続行する。CPU71は、2針目に突入したと判断した場合(S19:YES)、図8のフローに示すように、送り歯32は針板11の下方にあるか否か判断する(S22)。送り歯32が針板11の上方にある間は、布10は正送り方向に移送されている。布10の移送中に送り量を基準送り量(M)に戻してしまうと、布10が拠れてしまい綺麗な縫い目が形成できない場合がある。故に、CPU71は、送り歯32が針板11の下方にあると判断するまでは(S22:NO)、S22に戻って待機状態となる。
CPU71は、送り歯32が針板11の下方にあると判断した場合(S22:YES)、送り量復帰処理を実行する(S23)。送り量復帰処理では、CPU71は、送り量調節用モータ22を駆動し、送り歯32による1ピッチの送り量を基準送り量(M)に復帰させる。図7に示すように、送り歯32の水平送り位相は、1針目に比べて2針目の方が小さくなっている。さらに、送り歯32は針板11の下方にあるので、布10は送られていない状態である。この状態で送り量を基準送り量(M)に復帰させることで、次の周期で送り歯32が針板11よりも上方に移動したときに布10を正常に移送できる。故に、2針目以降の縫目も綺麗に形成できる。
CPU71は、ペダル91がONか否か判断する(S24)。CPU71は、ペダル91がOFFされたと判断した場合(S24:NO)、ミシンモータ87の駆動を停止し(S27)、縫製処理を終了する。一方、CPU71は、ペダル91は引き続きONと判断した場合(S24:YES)、次に、ペダル91に踏み返しがあったか否か判断する(S25)。作業者は、布10における縫い目を終わらせる為に糸切りを行う。糸切りを行う為には、例えば、作業者はペダル91を踵側に踏み返す。CPU71は、踏み返しが無いと判断した場合(S25:NO)、S24に戻り、ペダル91のON、OFF、及び踏み返し動作の有無について引き続き監視する。
CPU71は、ペダル91に作業者による踵側への踏み返しがあったと判断した場合(S25:YES)、糸切り信号を出力し、糸切り機構(図示略)による糸切り動作を実行する(S26)。糸切り機構は、糸切り信号を契機に、上糸8Aと下糸の両方を切断する。CPU71は、糸切り機構による糸切りが終了すると、ミシンモータ87の駆動を停止し、縫製処理を終了する。
以上説明したように、本実施形態のミシン1の使用時において、作業者は布10に生じる「鳥の巣」を軽減する為に、針糸残り長さを極力短くする。ミシン1の縫い目形成動作により布10の裏側に引き込まれる上糸量は少なくなる。ミシン1は、縫製開始時の布送りの送り量を通常よりも大きくする。すると、上糸8Aの一部が屈曲し、該屈曲部分Qは基準送り量に対して素早く押え足15の下に潜り混むことが可能となる。上糸8Aは押え足15によって屈曲部分Qが踏まれた状態であるため上糸の布側の抵抗が大きくなり天秤により引き上げられても、糸抜けを確実に防止できる。
さらに本実施形態では特に、縫製開始時に拡大送り量に調節した後、縫製開始時から2針目の後で、送り歯32が針板11よりも下方に移動したときに、基準送り量に復帰させる。故に、布10を送っている途中(例えば基準送り量より多く送った後)で基準送り量に戻ることがないので、布10に縫目を綺麗に形成できる。
さらに本実施形態では特に、縫製開始から少なくとも2針を縫製した後で、基準送り量(M)に調整するので、基準送り量時より1針目において上糸8Aを素早く屈曲させて、該屈曲部分Qを押え足15で踏ませることができる。
なお、本発明は上記実施の形態に限定されず、様々な変形が可能である。例えば、上記形態では、CPU71は、縫製開始から2針目を縫製した後で、さらに送り歯32が針板11よりも下方に位置した場合に基準送り量(M)に復帰しているが、それ以上を縫製した後で基準送り量(M)に復帰してもよい。ミシン1の動作条件、被縫製物の材質等に応じて、基準送り量(M)に復帰させるタイミングを適宜変更してもよい。
また、本発明の「調整駆動手段」について、上記実施形態では、送り量調節プーリ21、送り量調節用モータ22、駆動プーリ23、及びタイミングベルト24で構成しているが
この他の機構で構成してもよい。
この他の機構で構成してもよい。
1 ミシン
8A 上糸
11 針板
14 縫針
15 布押え
21 送り量調節プーリ
22 送り量調節用モータ
23 駆動プーリ
24 タイミングベルト
32 送り歯
70 制御装置
71 CPU
72 ROM
73 RAM
87 ミシンモータ
8A 上糸
11 針板
14 縫針
15 布押え
21 送り量調節プーリ
22 送り量調節用モータ
23 駆動プーリ
24 タイミングベルト
32 送り歯
70 制御装置
71 CPU
72 ROM
73 RAM
87 ミシンモータ
Claims (4)
- 上糸が通過する孔を有し且つ上下動する縫針と、
被縫製物を載置し且つ前記縫針を通す穴を有する針板と、
前記被縫製物を前記針板上で押さえる布押えと、
前記針板上で前記布押えと協働して前記被縫製物を送る送り歯と、
前記縫針の上下動に同期して前記送り歯を駆動する送り機構と、
前記送り機構における前記縫針の上下動の一周期あたりの前記被縫製物の送り量を調整可能な送り量調整手段と
を備えたミシンであって、
前記送り機構による前記被縫製物の送り量を調整するよう前記送り量調整手段を駆動する調整駆動手段と、
縫製開始時に、予め設定された前記被縫製物の送り量である基準量より送り量を大きくするよう前記調整駆動手段を制御する制御手段と
を備えたことを特徴とするミシン。 - 前記制御手段は、縫製開始から所定の針数を縫製した後、前記基準量に調整するよう前記調整駆動手段を制御することを特徴とする請求項1に記載のミシン。
- 前記制御手段は、縫製開始から前記所定の針数を縫製した後、前記送り歯が前記針板よりも下方に位置する場合に、前記基準量に調整するよう前記調整駆動手段を制御することを特徴とする請求項2に記載のミシン。
- 縫製開始から前記縫針が前記被縫製物に最初に刺さるのを1針とした場合に、前記所定の針数は少なくとも2針であることを特徴とする請求項2又は3に記載のミシン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011041382A JP2012176182A (ja) | 2011-02-28 | 2011-02-28 | ミシン |
| CN2012100507360A CN102653902B (zh) | 2011-02-28 | 2012-02-21 | 缝纫机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011041382A JP2012176182A (ja) | 2011-02-28 | 2011-02-28 | ミシン |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012176182A true JP2012176182A (ja) | 2012-09-13 |
Family
ID=46729625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011041382A Withdrawn JP2012176182A (ja) | 2011-02-28 | 2011-02-28 | ミシン |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2012176182A (ja) |
| CN (1) | CN102653902B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104120560B (zh) * | 2013-04-23 | 2018-02-13 | Juki株式会社 | 缝纫机的控制方法 |
| TWI557287B (zh) * | 2015-09-21 | 2016-11-11 | 伸興工業股份有限公司 | Handwriting Needle Identification Method and Its Identification System |
| JP7253904B2 (ja) * | 2018-11-22 | 2023-04-07 | Juki株式会社 | ミシン |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004329394A (ja) * | 2003-05-02 | 2004-11-25 | Juki Corp | ミシンの送り装置 |
| DE102005029955A1 (de) * | 2005-06-28 | 2007-01-04 | Dürkopp Adler AG | Nähmaschine |
-
2011
- 2011-02-28 JP JP2011041382A patent/JP2012176182A/ja not_active Withdrawn
-
2012
- 2012-02-21 CN CN2012100507360A patent/CN102653902B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102653902A (zh) | 2012-09-05 |
| CN102653902B (zh) | 2013-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103710905B (zh) | 纽扣孔锁边缝纫机 | |
| CN1325715C (zh) | 循环缝纫机 | |
| JP2008079998A (ja) | ミシン | |
| JP5925603B2 (ja) | ミシン | |
| JP2006187417A (ja) | ミシン | |
| JP2008080110A (ja) | ミシン | |
| JP2012176182A (ja) | ミシン | |
| CN106917194B (zh) | 缝纫机及缝纫机的控制方法 | |
| JP2012165849A (ja) | ミシン及びミシンの糸切り方法 | |
| JP2841299B2 (ja) | 零送り設定スタートミシン | |
| CN106192223B (zh) | 缝纫机及缝纫机的控制方法 | |
| JP2010179014A (ja) | ミシン及び糸張力設定プログラム | |
| JP2006020757A (ja) | 刺繍縫製可能なミシン | |
| JP3531524B2 (ja) | ミシンの下糸切断装置 | |
| JP4404974B2 (ja) | ミシンの糸張力制御装置 | |
| JP2003164679A (ja) | 根巻きボタン付けミシン | |
| JP2010142536A (ja) | ミシン | |
| CN105133197B (zh) | 缝纫机 | |
| JP2013154062A (ja) | ミシン | |
| EP3889333A1 (en) | Sewing device | |
| CN101538778A (zh) | 纽扣孔锁边缝纫机 | |
| JP4509847B2 (ja) | ミシン | |
| JP4070665B2 (ja) | 穴かがりミシン | |
| JP2013208403A (ja) | 穴かがり縫いミシン | |
| JP4840420B2 (ja) | 穴かがり縫いミシン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |