JP2012177454A - 搬送台車 - Google Patents
搬送台車 Download PDFInfo
- Publication number
- JP2012177454A JP2012177454A JP2011041790A JP2011041790A JP2012177454A JP 2012177454 A JP2012177454 A JP 2012177454A JP 2011041790 A JP2011041790 A JP 2011041790A JP 2011041790 A JP2011041790 A JP 2011041790A JP 2012177454 A JP2012177454 A JP 2012177454A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- cylinder
- piston
- body frame
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Handcart (AREA)
- Fluid-Damping Devices (AREA)
Abstract
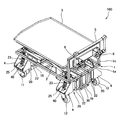
【解決手段】荷台3を介して荷物を載置可能な車体フレーム1と、車体フレーム1を支持する駆動輪11,自在輪12と、駆動輪11,自在輪12を車体フレーム1に懸架する懸架装置20とを備え、懸架装置20に設けられる変位依存ダンパ40は、磁界の作用によって粘性が変化する磁気粘性流体が封入されるシリンダ41と、駆動輪11,自在輪12に対する車体フレーム1の上下動がピストンロッド44を介して伝達されシリンダ41内を摺動するピストン43と、シリンダ41内に磁界を作用させる電磁石45と、ピストン43の位置に応じて変化するシリンダ41内の磁界を検出する磁気センサ47とを備え、磁気センサ47は、荷台3に最大搭載量を超える荷物が搭載されたときのピストン43の位置における磁界の状態を検出した場合に信号を出力する。
【選択図】図4
Description
以下、図1から図4を参照して、本発明の第1の実施の形態に係る搬送台車100について説明する。
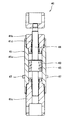
以下、図5を参照して、本発明の第2の実施の形態に係る電動アシスト台車に用いられる変位依存ダンパ240ついて説明する。なお、以下に示す各実施の形態では、前述した実施の形態と同様の構成には同一の符号を付し、重複する説明は適宜省略する。
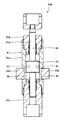
以下、図6を参照して、本発明の第3の実施の形態に係る電動アシスト台車に用いられる変位依存ダンパ340ついて説明する。
1 車体フレーム
3 荷台
5 操作ハンドル
6 トルクセンサ
11 駆動輪
12 自在輪
15 電動モータ
20 懸架装置
25 非線形ばね
30 コントローラ
40 変位依存ダンパ
41 シリンダ
43 ピストン
45 電磁石
47 磁気センサ
240 変位依存ダンパ
245 磁石
340 変位依存ダンパ
Claims (7)
- 荷台を介して荷物を載置可能な車体フレームと、
前記車体フレームを支持する車輪と、
前記車輪を前記車体フレームに懸架する懸架装置と、を備える搬送台車であって、
前記懸架装置は、前記車輪に対する前記車体フレームの上下動を減衰する緩衝器を備え、
前記緩衝器は、
磁界の作用によって粘性が変化する磁気粘性流体が封入されるシリンダと、
前記車輪に対する前記車体フレームの上下動がピストンロッドを介して伝達され、前記シリンダ内を摺動するピストンと、
前記シリンダ内に磁界を作用させる磁界発生部と、
前記ピストンの位置に応じて変化する前記シリンダ内の磁界を検出する磁界検出部と、を備え、
前記磁界検出部は、前記荷台に最大搭載量を超える荷物が搭載されたときの前記ピストンの位置における磁界の状態を検出した場合に信号を出力することを特徴とする搬送台車。 - 前記ピストンは、前記シリンダの内周との間に磁気粘性流体が通過可能な間隔をもって設けられ、
前記緩衝器は、前記ピストンと前記シリンダとの間の間隔を磁気粘性流体が通過することによって減衰力を発生することを特徴とする請求項1に記載の搬送台車。 - 前記磁界検出部は、前記車体フレームが沈み込んで前記ピストンが摺動するほど前記磁気発生部から作用する磁界が強くなり、作用する磁界の強さが所定の閾値を超えた場合に信号を出力するものであることを特徴とする請求項1又は2に記載の搬送台車。
- 前記磁界発生部は、前記シリンダ内を前記ピストンと一体に摺動する電磁石であり、
前記磁界検出部は、前記ピストンロッドが前記シリンダ内に最も進入したときの前記ピストンの位置に対応して前記シリンダに取り付けられることを特徴とする請求項3に記載の搬送台車。 - 前記磁界発生部は、前記ピストンロッドが前記シリンダ内に最も進入したときの前記ピストンの位置に対応して前記シリンダに取り付けられる永久磁石であり、
前記磁界検出部は、前記シリンダ内を前記ピストンと一体に摺動するように設けられることを特徴とする請求項3に記載の搬送台車。 - 前記磁界検出部は、前記車体フレームが沈み込んで前記ピストンが摺動するのに応じて前記磁気発生部から作用する磁界の状態が変化し、作用する磁界が所定の状態になった場合に信号を出力するものであることを特徴とする請求項1又は2に記載の搬送台車。
- 前記磁界発生部は、前記ピストンロッドが前記シリンダ内に最も進入したときの前記ピストンの位置に対応して前記シリンダに取り付けられる永久磁石であり、
前記磁界検出部は、前記シリンダに取り付けられることを特徴とする請求項6に記載の搬送台車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011041790A JP5679865B2 (ja) | 2011-02-28 | 2011-02-28 | 搬送台車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011041790A JP5679865B2 (ja) | 2011-02-28 | 2011-02-28 | 搬送台車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012177454A true JP2012177454A (ja) | 2012-09-13 |
| JP5679865B2 JP5679865B2 (ja) | 2015-03-04 |
Family
ID=46979417
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011041790A Expired - Fee Related JP5679865B2 (ja) | 2011-02-28 | 2011-02-28 | 搬送台車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5679865B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109353767A (zh) * | 2018-12-18 | 2019-02-19 | 深圳市佳顺智能机器人股份有限公司 | 一种连杆悬挂减震舵轮及自动导引运输车 |
| CN110939054A (zh) * | 2019-12-17 | 2020-03-31 | 中铁大桥勘测设计院集团有限公司 | 安装有粘滞阻尼器的桥梁的控制系统及其控制方法 |
| CN114179892A (zh) * | 2021-10-30 | 2022-03-15 | 江西行者物流科技有限公司 | 一种基于物联网数据反馈的物流运输设备用主动减震装置 |
| CN115288457A (zh) * | 2022-10-08 | 2022-11-04 | 中建五局(山东)投资建设有限公司 | 一种用于钢结构固定及运输的施工设备 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109764076A (zh) * | 2019-03-12 | 2019-05-17 | 上海理工大学 | 一种自适应变阻尼剪切增稠液减振器 |
| CN111962879B (zh) * | 2020-06-30 | 2021-10-01 | 中铁建工集团广东有限公司 | 一种高层公共建筑施工用环保卸料平台 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61534U (ja) * | 1984-06-08 | 1986-01-06 | 株式会社 小金井製作所 | 緩衝器 |
| JPH01247266A (ja) * | 1988-03-29 | 1989-10-03 | Okudaya Giken:Kk | ハンドリフトトラック |
| JPH0798036A (ja) * | 1993-05-18 | 1995-04-11 | Showa:Kk | 緩衝器のストローク検出装置 |
| JP2004149023A (ja) * | 2002-10-31 | 2004-05-27 | Mitsubishi Heavy Ind Ltd | 搬送台車 |
| JP2006273222A (ja) * | 2005-03-30 | 2006-10-12 | Honda Motor Co Ltd | 可変減衰力ダンパーの制御装置 |
| JP2007239982A (ja) * | 2006-02-09 | 2007-09-20 | Central Res Inst Of Electric Power Ind | 磁気粘性流体ダンパ |
-
2011
- 2011-02-28 JP JP2011041790A patent/JP5679865B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61534U (ja) * | 1984-06-08 | 1986-01-06 | 株式会社 小金井製作所 | 緩衝器 |
| JPH01247266A (ja) * | 1988-03-29 | 1989-10-03 | Okudaya Giken:Kk | ハンドリフトトラック |
| JPH0798036A (ja) * | 1993-05-18 | 1995-04-11 | Showa:Kk | 緩衝器のストローク検出装置 |
| JP2004149023A (ja) * | 2002-10-31 | 2004-05-27 | Mitsubishi Heavy Ind Ltd | 搬送台車 |
| JP2006273222A (ja) * | 2005-03-30 | 2006-10-12 | Honda Motor Co Ltd | 可変減衰力ダンパーの制御装置 |
| JP2007239982A (ja) * | 2006-02-09 | 2007-09-20 | Central Res Inst Of Electric Power Ind | 磁気粘性流体ダンパ |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109353767A (zh) * | 2018-12-18 | 2019-02-19 | 深圳市佳顺智能机器人股份有限公司 | 一种连杆悬挂减震舵轮及自动导引运输车 |
| CN110939054A (zh) * | 2019-12-17 | 2020-03-31 | 中铁大桥勘测设计院集团有限公司 | 安装有粘滞阻尼器的桥梁的控制系统及其控制方法 |
| CN110939054B (zh) * | 2019-12-17 | 2021-10-26 | 中铁大桥勘测设计院集团有限公司 | 安装有粘滞阻尼器的桥梁的控制系统及其控制方法 |
| CN114179892A (zh) * | 2021-10-30 | 2022-03-15 | 江西行者物流科技有限公司 | 一种基于物联网数据反馈的物流运输设备用主动减震装置 |
| CN115288457A (zh) * | 2022-10-08 | 2022-11-04 | 中建五局(山东)投资建设有限公司 | 一种用于钢结构固定及运输的施工设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5679865B2 (ja) | 2015-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012166747A (ja) | 搬送台車 | |
| JP5679865B2 (ja) | 搬送台車 | |
| JP5798878B2 (ja) | 搬送台車 | |
| JP5798868B2 (ja) | 電動アシスト台車 | |
| CN103842237B (zh) | 电动辅助台车 | |
| KR101307057B1 (ko) | 차량용 능동 현가 시스템 | |
| CN104712702B (zh) | 高度可调整的缓冲装置 | |
| CN103857579B (zh) | 电动辅助台车 | |
| US20060237885A1 (en) | Active seat suspension | |
| US11377003B2 (en) | Suspension system, preferably driver seat | |
| EP2053013A2 (en) | Magneto-rheological inertial damping system for lift trucks | |
| JP5860658B2 (ja) | 電動アシスト台車 | |
| JP5544599B2 (ja) | 磁気吸着車両 | |
| CN102133848A (zh) | 工业车辆 | |
| JP2008068853A (ja) | 自動車の後輪トー角制御装置 | |
| EP3268262B1 (en) | Dual rotor torque generating devices, systems, and methods | |
| JP5604327B2 (ja) | 電動アシスト台車 | |
| JP5719605B2 (ja) | 電動アシスト台車 | |
| JP2008513264A (ja) | 車両レベル検出装置 | |
| CN113002662B (zh) | 一种移动机器人及其舵轮装置 | |
| KR20140095340A (ko) | 무게중심 조정 기능을 구비한 이동 장치 | |
| JP5369662B2 (ja) | 車両用サスペンション装置、電動モータの制御方法 | |
| JP2012061886A (ja) | 電動アシスト台車 | |
| CN115284865A (zh) | 舵轮及运输装置 | |
| KR102050878B1 (ko) | 특수 차량 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141216 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150106 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5679865 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |