JP2012179996A - 能動型振動騒音抑制装置 - Google Patents
能動型振動騒音抑制装置 Download PDFInfo
- Publication number
- JP2012179996A JP2012179996A JP2011043625A JP2011043625A JP2012179996A JP 2012179996 A JP2012179996 A JP 2012179996A JP 2011043625 A JP2011043625 A JP 2011043625A JP 2011043625 A JP2011043625 A JP 2011043625A JP 2012179996 A JP2012179996 A JP 2012179996A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- transfer function
- frequency
- noise
- identification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Soundproofing, Sound Blocking, And Sound Damping (AREA)
Abstract
【課題】車両に乗員が搭乗している状態において同定処理を行うとしても、乗員への不快感を低減することができる同定処理を行う能動型振動騒音抑制装置を提供する。
【解決手段】車両走行中でエンジン10の駆動中であり、路面伝達振動検出部190により検出される振動の大きさRmaxが閾値Thr以下の場合に、エンジン10による発生振動または発生騒音の周波数frealと異なる同定周波数fEstについて制御信号y(n)を出力した場合の残留信号e(n)に基づいて第一伝達関数Gの同定処理を行い、算出された第一伝達関数Gの推定値GhをGhデータ記憶部150に記憶させる。
【選択図】図4
【解決手段】車両走行中でエンジン10の駆動中であり、路面伝達振動検出部190により検出される振動の大きさRmaxが閾値Thr以下の場合に、エンジン10による発生振動または発生騒音の周波数frealと異なる同定周波数fEstについて制御信号y(n)を出力した場合の残留信号e(n)に基づいて第一伝達関数Gの同定処理を行い、算出された第一伝達関数Gの推定値GhをGhデータ記憶部150に記憶させる。
【選択図】図4
Description
本発明は、適応制御を用いて、能動的に振動や騒音を抑制することができる能動型振動騒音抑制装置に関するものである。
従来、適応制御を用いて能動的に振動または騒音を抑制する装置として、特開平10−187164号公報(特許文献1)に記載されたものがある。この装置は、制御信号生成部から評価点までの伝達系の伝達関数について同定処理を行い、同定処理によって得られた伝達関数の推定値を用いて、制御信号の適応フィルタのフィルタ係数を更新することで、能動的に振動または騒音を抑制するというものである。
ところで、特許文献1のような適応制御においては、実際の伝達関数と伝達関数の推定値とにずれが生じた場合には、評価点において振動または騒音が収束せずに発散するおそれがある。そして、車両の様々な経年変化によって、実際の伝達関数が変化する。そこで、伝達関数の同定処理を行う回数を増加させることで、経年変化に追従して、実際の伝達関数と伝達関数の推定値とのずれを小さくすることが考えられる。
伝達関数の同定処理を行うためには、能動型振動騒音抑制装置により実際に振動または騒音を発生させることになる。同定処理の回数を増加させることに伴い、車両に乗員が搭乗している状態において同定処理を行うと、同定処理により生じる振動または騒音によって乗員へ不快感を与えるおそれがある。
本発明は、このような事情に鑑みてなされたものであり、車両に乗員が搭乗している状態において同定処理を行うとしても、乗員への不快感を低減することができる同定処理を行う能動型振動騒音抑制装置を提供することを目的とする。
本発明に係る能動型振動騒音抑制装置は、車両において、制御信号y(n)に応じた制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、振動または騒音の発生源であるエンジンによる発生振動または発生騒音の周波数、適応フィルタ係数により構成される前記制御信号y(n)を生成する制御信号生成部と、前記評価点において、前記制御信号y(n)に応じて出力された制御振動または制御音と前記発生源による振動または騒音との干渉による残留信号e(n)を検出する残留信号検出部と、前記制御信号生成部と前記評価点との間の伝達関数の推定値を記憶する推定伝達関数記憶部と、前記残留信号e(n)および伝達関数の推定値に基づいて、設定された評価関数を最小とするように前記適応フィルタ係数を更新する適応フィルタ係数更新部と、車両走行中において路面から伝達される振動の大きさを検出する路面伝達振動検出部と、車両走行中で前記エンジン駆動中であり、前記路面伝達振動検出部により検出される振動の大きさが閾値以下の場合に、前記エンジンによる発生振動または発生騒音の周波数と異なる同定周波数について前記制御信号を出力した場合の前記残留信号e(n)に基づいて前記伝達関数の同定処理を行い、算出された前記伝達関数の推定値を前記推定伝達関数記憶部に記憶させる伝達関数同定処理部とを備える。
本発明によれば、走行中でエンジン駆動中に同定処理を行うことにより、車両停止中に同定処理を行う場合に比べて、乗員が同定処理に伴い発生する振動または騒音を感じにくくできる。つまり、乗員の不快感が少ない。また、走行中は、路面からの振動が車体に入力されるため、伝達関数の同定精度に影響を及ぼすおそれがある。しかし、路面伝達振動検出部により検出される振動の大きさが閾値以下の場合に同定処理を行うようにしている。つまり、路面からの振動が伝達関数の同定に影響の少なくなるタイミングにおいて、同定処理を行うようにしている。従って、路面からの振動によって、同定精度が悪化することなく、高精度に伝達関数を推定することができる。
ところで、走行中でエンジン駆動中に同定処理を行うため、エンジンによる発生振動または発生騒音に起因して伝達関数の同定精度にばらつきを生じるおそれがある。例えば、瞬間的な伝達関数の推定値は、実際の伝達関数とは大きくずれた値となるおそれがある。
そこで、前記伝達関数同定処理部は、前記同定周波数について前記伝達関数の同定処理を複数回行い、算出された複数の前記伝達関数の推定値の平均値を前記伝達関数の推定値として前記推定伝達関数記憶部に記憶させるようにしてもよい。つまり、複数回の同定処理を行い、得られた複数の伝達関数の推定値を平均化した値を伝達関数の推定値とする。これにより、エンジンによる発生振動または発生騒音に起因したばらつきが生じたとしても、適応制御に用いる伝達関数の推定値はある程度安定した値となる。従って、確実に評価点における振動または騒音を抑制することができる。
また、前記伝達関数同定処理部は、車両走行速度が一定のときに前記同定処理を行うようにしてもよい。車両の走行速度が一定のときに同定処理を行うことで、車両の加減速に伴う振動または騒音が発生していないときに同定処理を行うことができる。これにより、高精度に伝達関数の推定値を算出できる。
また、前記伝達関数同定処理部は、前記エンジンによる発生振動または発生騒音の周波数が前記伝達関数の共振周波数より高い場合に、前記エンジンによる発生振動または発生騒音の周波数より小さい前記同定周波数について同定処理を行うようにしてもよい。
エンジンによる発生振動または発生騒音の周波数が伝達関数の共振周波数より十分に高い場合とすることで、エンジンによる発生振動または発生騒音が評価点において極力小さな状態とできる。この状態を前提として、同定周波数をエンジンによる発生振動または発生騒音の周波数より小さい周波数とすることで、同定周波数において、エンジンによる発生振動または発生騒音の影響を小さくできる。従って、同定処理により算出された伝達関数をより高精度に得ることができる。
また、前記評価点は、前記サスペンションメンバであり、前記路面伝達振動検出部は、前記サスペンションメンバに取り付けられ、前記サスペンションメンバの振動の大きさを検出するようにしてもよい。評価点が位置する部材と同一体であるサスペンションメンバの振動に応じて同定処理を行うか否かを判定することで、同定に影響を及ぼす振動が発生していない場合に確実に同定処理を行うことができる。
また、前記路面伝達振動検出部と前記残留信号検出部とは、同一のセンサを用いるようにしてもよい。路面伝達振動検出部と残留信号検出部として同一のセンサを共有することで、低コスト化を図ることができる。
また、前記路面伝達振動検出部は、サスペンションを介してサスペンションメンバに懸架される車輪に取り付けられ、前記車輪の振動の大きさを検出するようにしてもよい。車輪は、路面の状況に最もよく反応する。そして、車輪の振動の大きさが閾値以下の時に、伝達関数の同定処理を行うようにすることで、伝達関数の同定処理において路面の影響を確実に受けないようにできる。
(能動型振動騒音抑制装置の概要)
能動型振動騒音抑制装置100の制御概念について図1を参照して説明する。能動型振動騒音抑制装置100は、種々の発生源10が振動または騒音(以下、「抑制対象振動等」と称する)を発生する場合に、所望の位置(評価点)20において当該振動または騒音を能動的に抑制するために、制御振動または制御音(以下、「制御振動等」と称する)を発生させる装置である。つまり、抑制対象振動等に対して制御振動等を合成させることで、評価点20において、制御振動等が抑制対象振動等を打ち消すように作用する。その結果、評価点20において、抑制対象振動等が抑制されることになる。
能動型振動騒音抑制装置100の制御概念について図1を参照して説明する。能動型振動騒音抑制装置100は、種々の発生源10が振動または騒音(以下、「抑制対象振動等」と称する)を発生する場合に、所望の位置(評価点)20において当該振動または騒音を能動的に抑制するために、制御振動または制御音(以下、「制御振動等」と称する)を発生させる装置である。つまり、抑制対象振動等に対して制御振動等を合成させることで、評価点20において、制御振動等が抑制対象振動等を打ち消すように作用する。その結果、評価点20において、抑制対象振動等が抑制されることになる。
ここで、自動車を例にあげて説明する。自動車において、エンジン(内燃機関)が振動騒音発生源10となり、エンジン10によって発生した振動や騒音が車室内に伝達されないようにすることが望まれる。そこで、エンジン10によって発生した振動や騒音(抑制対象振動等)を能動的に抑制するために、制御振動または制御音の発生装置130によって制御振動等を発生させることとしている。なお、以下において、能動型振動騒音抑制装置100は、自動車に適用し、エンジン10によって発生される振動または騒音を抑制する装置を例に挙げて説明するが、これに限られるものではない。能動型振動騒音抑制装置100は、抑制すべき振動や騒音を発生するものであれば、全てに適用できる。
以下に、能動型振動騒音抑制装置100の詳細について説明する。まずは、能動型振動騒音抑制装置100を実際の自動車に適用した場合の配置について説明する。その後に、能動型振動騒音抑制装置100の機能について説明する。ここで、能動型振動騒音抑制装置100の機能は、制御振動または制御音を発生して評価点20における振動騒音を抑制する制御と、当該制御を行うために用いる伝達関数の同定処理とがある。そこで、能動型振動騒音抑制装置100を実際の自動車に適用した場合の配置について説明した後に、制御振動または制御音を発生して評価点20における振動騒音を抑制する制御について説明する。その後に、当該制御を行うために用いる伝達関数の同定処理について説明する。
(能動型振動騒音抑制装置100の自動車における配置)
図2を参照して、能動型振動騒音抑制装置100を実際の自動車に適用した場合の配置について説明する。図2には、自動車の後部のサスペンション装置について示している。図2に示すように、ディファレンシャル310からドライブシャフト320を介してリアアクスル330に連結されている。つまり、エンジン10(図2には図示せず)の駆動力がディファレンシャル310およびドライブシャフト320を介してリアアクスル330に伝達される。
図2を参照して、能動型振動騒音抑制装置100を実際の自動車に適用した場合の配置について説明する。図2には、自動車の後部のサスペンション装置について示している。図2に示すように、ディファレンシャル310からドライブシャフト320を介してリアアクスル330に連結されている。つまり、エンジン10(図2には図示せず)の駆動力がディファレンシャル310およびドライブシャフト320を介してリアアクスル330に伝達される。
ディファレンシャル310は、サスペンションメンバ340にマウントを介して支持されている。また、サスペンションメンバ340は、マウントを介して車両ボディ(図示せず)に支持されている。また、リアアクスル330は、サスペンションメンバ340にロッド350を介して弾性支持されており、かつ、ショックアブソーバ360およびスプリング370を介して車両ボディに支持されている。
そして、能動型振動騒音抑制装置100における制御振動または制御音を実際に発生させる発生装置130(図1および図3に示す)を、サスペンションメンバ340の車両左右方向中央(図2における「A」の部位)に配置する。また、路面から伝達される振動の大きさを検出する路面伝達振動検出部190(図3に示す)を、発生装置130が配置されるサスペンションメンバ340の車両左右方向中央(図2における「A」の部位)、または、リアアクスル330(図2における「B」の部位)に配置する。路面伝達振動検出部190の配置は、目的に応じて適宜変更することができる。このことについては、後述する。
なお、本実施形態においては、発生装置130の位置および評価点20をリアのサスペンションメンバ340としたがこれに限定されるものではない。評価点20は、目的に応じて適宜変更可能となる。例えば、発生装置130の位置および評価点20をフロントのサスペンションメンバ(エンジンフレーム)、車室内などとすることもできる。また、発生装置130と評価点20とをそれぞれ別々の位置に設定することもできる。
(能動型振動騒音抑制装置における振動騒音抑制制御のブロック構成)
能動型振動騒音抑制装置100における振動騒音抑制制御に関するブロック構成について、図1を参照して詳細に説明する。能動型振動騒音抑制装置100は、適応最小平均自乗フィルタ(Filtered-X LMS)を用いた適応制御を適用する。そして、図1に示すように、能動型振動騒音抑制装置100は、エンジン10によって発生される抑制対象振動等が第二伝達関数Hを介して評価点20に伝達する場合に、評価点20における振動または騒音を低減するための装置である。
能動型振動騒音抑制装置100における振動騒音抑制制御に関するブロック構成について、図1を参照して詳細に説明する。能動型振動騒音抑制装置100は、適応最小平均自乗フィルタ(Filtered-X LMS)を用いた適応制御を適用する。そして、図1に示すように、能動型振動騒音抑制装置100は、エンジン10によって発生される抑制対象振動等が第二伝達関数Hを介して評価点20に伝達する場合に、評価点20における振動または騒音を低減するための装置である。
能動型振動騒音抑制装置100は、周波数算出部110と、制御信号生成部120と、発生装置130と、残留信号検出部140と、第一推定伝達関数記憶部(以下、「Ghデータ記憶部」と称する)150と、第一推定伝達関数選択部(以下、「Ghデータ選択部」と称する)160と、適応フィルタ係数更新部170とを備えている。なお、記載の都合上、明細書の本文において、推定値「ハット(^)」は、「h」と記載する。
周波数算出部110は、エンジン10の回転数を検出する回転検出器(図示せず)から周期性のパルス信号を入力し、当該パルス信号に基づいて、エンジン10が発生する振動または騒音(抑制対象振動等)の主成分の周波数frealを算出する。
制御信号生成部120は、周波数算出部110にて算出された周波数frealに基づいて、式(1)に従って得られる正弦波としての制御信号y(n)を適応制御によって生成する。ここで、添字の(n)は、サンプリング数(時間ステップ)を表す添字である。つまり、式(1)より明らかなように、制御信号y(n)は、周波数frealと、適応フィルタ係数W(n)としての振幅フィルタ係数a(n)および位相フィルタ係数φ(n)とを構成成分に含む、時刻t(n)における信号である。そして、振幅フィルタ係数a(n)および位相フィルタ係数φ(n)は、後述する適応フィルタ係数更新部170により適応的に更新される。

発生装置130は、実際に振動や音を発生する装置である。この発生装置130は、制御信号生成部120によって生成された制御信号y(n)に基づいて駆動する。例えば、制御振動を発生させる発生装置130としては、例えば、駆動系につながるフレームやサスペンションメンバなどのサブフレームに配置される振動発生装置である。また、制御音を発生させる発生装置130としては、例えば、スピーカー等である。発生装置130が例えば磁力を用いて制御振動や制御音を発生させる装置の場合には、コイル(図示せず)に供給する電流、電圧または電力を、各時刻t(n)における制御信号y(n)に応じるように制御することで、発生装置130が制御信号y(n)に応じた制御振動または制御音を発生する。
そうすると、評価点20においては、発生装置130によって発生された制御振動等が伝達系Bを介して伝達された制御振動等Z(n)と、エンジン10によって発生された抑制対象振動等が第二伝達関数Hを介して伝達された振動騒音X(n)とが合成される。
そこで、残留信号検出部140は、評価点20に配置されており、評価点20における残留振動または残留騒音(本発明における「残留信号」に相当する)e(n)を検出する。この残留振動e(n)は、式(2)で表される。例えば、残留振動e(n)を検出する残留信号検出部140としては、加速度センサなどを適用できる。また、残留音e(n)を検出する残留信号検出部140としては、吸音マイクなどを適用できる。残留信号検出部140によって検出される残留信号e(n)がゼロになることが理想状態である。なお、第一伝達関数Gは、制御信号生成部120と評価点20との間の伝達系の伝達関数である。つまり、第一伝達関数Gは、発生装置130そのものの伝達関数と、発生装置130と評価点20との間の伝達系Bの伝達関数とを含む。
Ghデータ記憶部150は、後述する伝達関数同定処理において算出および更新された第一推定伝達関数Gh(第一伝達関数Gの推定値Gh)が記憶されている。第一伝達関数Gは、周波数fに応じた振幅成分AGと位相成分ΦGとにより表される。そこで、式(3)に示すように、第一推定伝達関数Ghとしては、周波数frealに応じた振幅成分AhGと位相成分ΦhGとにより表される。なお、式(3)においては、第一推定伝達関数Gh、振幅成分AhGおよび位相成分ΦhGは、周波数frealに応じたものとなるため、frealの関数であることを明記するために、それぞれGh(f)、AhG(f)およびΦhG(f)と記載している。
Ghデータ選択部160は、Ghデータ記憶部150に記憶されている第一推定伝達関数Ghの中から、周波数算出部110にて算出された周波数frealに応じた第一推定伝達関数Ghを選択する。つまり、Ghデータ選択部160は、周波数算出部110にて算出された周波数frealに応じた振幅成分AhGおよび位相成分ΦhGを選択する。
適応フィルタ係数更新部170は、上述した制御信号y(n)を構成するための適応フィルタ係数W(n)を適応的に更新する。適応フィルタ係数W(n)は、式(4)に示すように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。
この適応フィルタ係数更新部170は、残留信号e(n)に基づき設定された評価関数Jを最小とするように適応フィルタ係数Wを更新する。以下に、適応フィルタ係数更新部170において、適応フィルタ係数Wを更新する更新式の導き方について説明する。
評価関数Jを式(5)のように定義する。つまり、評価関数Jは、残留信号検出部140により検出される残留信号eの二乗とする。この評価関数Jが最小となるような制御信号y(n)を求める。
勾配ベクトル▽(n)を式(6)に従って算出する。勾配ベクトル▽(n)は、評価関数J(n)を適応フィルタ係数W(n)で偏微分して得られる。そうすると、勾配ベクトル▽(n)は、右辺のように表される。
このようにして算出した勾配ベクトル▽(n)にステップサイズパラメータμを乗じた項を、前回更新された適応フィルタ係数W(n)から減算することにより、適応フィルタ係数W(n+1)を導き出す。このようにして、式を展開すると、式(7)のように表される。
ここで、適応フィルタ係数W(n)は、式(4)にて示したように、振幅フィルタ係数a(n)と位相フィルタ係数φ(n)とにより構成される。つまり、振幅フィルタ係数a(n)の更新式は式(8)のように表され、位相フィルタ係数φ(n)の更新式は式(9)のように表される。ここで、式(8)の(1/AhG)は、振幅フィルタ係数a(n)の更新に対して正規化処理を加えたものである。
つまり、適応フィルタ係数更新部170は、前回更新された振幅フィルタ係数a(n)に対して、第一推定伝達関数Gh、残留信号e(n)および振幅用ステップサイズパラメータμaに基づき算出される振幅更新式の更新項を加減算することにより、振幅フィルタ係数a(n+1)を更新する。また、適応フィルタ係数更新部170は、前回更新された位相フィルタ係数φ(n)に対して、第一推定伝達関数Gh、残留信号e(n)および位相用ステップサイズパラメータμφに基づき算出される位相更新式の更新項を加減算することにより、位相フィルタ係数φ(n+1)を更新する。
(能動型振動騒音抑制装置における伝達関数同定処理のブロック構成)
次に、上述した振動騒音抑制制御を行うために用いる第一伝達関数Ghの同定処理について説明する。つまり、伝達関数同定処理により、上述したGhデータ記憶部150に記憶する第一推定伝達関数Ghを算出(同定)する。
次に、上述した振動騒音抑制制御を行うために用いる第一伝達関数Ghの同定処理について説明する。つまり、伝達関数同定処理により、上述したGhデータ記憶部150に記憶する第一推定伝達関数Ghを算出(同定)する。
第一推定伝達関数Ghの同定処理について、図3を参照して説明する。第一推定伝達関数Ghの同定処理は、予め製造初期において行うと共に、例えば、車両走行中に都度更新する。ここでは、主として車両走行中に更新を行う場合について記載する。
図3に示すように、能動型振動騒音抑制装置100において、第一推定伝達関数Ghの同定処理を行う構成は、周波数算出部110と、車速検出部180と、路面伝達振動検出部190と、伝達関数同定処理部200と、制御信号生成部120と、発生装置130と、残留信号検出部140と、Ghデータ記憶部150とを備えている。ここで、周波数算出部110は、上述した周波数算出部110と同一構成であるので、説明を省略する。
車速検出部180は、車両の速度Vを検出し、車両の速度変化ΔVを算出する。車両が一定速度で走行中には、車両の速度変化ΔVが一定値となる。また、路面伝達振動検出部190は、車両走行中において路面から伝達される振動の大きさRmaxを検出する。
伝達関数同定処理部200は、同定処理開始判定部210と、同定周波数設定部220と、同定フィルタ係数設定部230と、Ghデータ算出更新部240とを備えている。
同定処理開始判定部210は、周波数算出部110により算出された実際の周波数freal、車速検出部180により算出された車両の速度変化ΔV、および、路面伝達振動検出部190により検出された路面振動の大きさRmaxに基づいて、同定処理を開始するか否かの判定を行う。
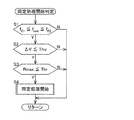
ここで、図4および図5を用いて、同定処理開始判定部210による同定処理開始判定について説明する。同定処理開始判定部210は、周波数算出部110により算出された実際の周波数frealが設定された判定用の周波数範囲(fE1以上fE2以下の範囲)であるか否かを判定する(ステップS1)。なお、実際の周波数frealが設定された判定用の周波数範囲(fE1以上fE2以下の範囲)である場合には、当然に、エンジン10が駆動中であることを意味する。
判定用の周波数範囲fE1〜fE2について、図5を参照して説明する。図5に、第一伝達関数Gの振幅AGの周波数特性を実線にて示す。第一伝達関数Gの共振点(共振周波数)は、fG0である。そして、能動型振動騒音抑制装置100の制御対象周波数範囲は、fT1以上fT2以下の範囲である。例えば、制御対象周波数範囲は、30Hz以上70Hz以下の範囲などとする。つまり、伝達関数同定処理部200により同定すべき周波数は、制御対象周波数範囲fT1〜fT2となる。そして、判定用の周波数範囲fE1〜fE2は、共振周波数fG0よりも十分に高い周波数であり、かつ、同定すべき周波数である制御対象周波数範囲fT1〜fT2は異なる周波数に設定されている。
つまり、エンジン10による発生振動または発生騒音の周波数frealが第一伝達関数Gの共振周波数fG0より十分に高くすることで、エンジン10による発生振動または発生騒音が評価点20において極力小さな状態とできる。この状態を前提として、同定周波数fEstをエンジン10による発生振動または発生騒音の周波数frealより小さい周波数とすることで、同定周波数fEstにおいて、エンジン10による発生振動または発生騒音の影響を小さくできる。
続いて、実際の周波数frealが判定用の周波数範囲fE1〜fE2である場合には(ステップS1:Y)、車速検出部180により算出された車両の速度変化ΔVが閾値Thv以下であるか否かを判定する(ステップS2)。ここで、閾値Thvは、零に近い値である。つまり、当該条件を満たす場合には、車速がほぼ一定値となる。第一伝達関数Gの同定処理に際して、車速変動に起因した振動の影響をできる限り小さくするために、このような判定を行っている。
続いて、車両の速度変化ΔVが閾値Thv以下の場合には(ステップS2:Y)、路面伝達振動検出部190により算出された路面伝達振動の大きさRmaxが閾値Thr以下であるか否かを判定する(ステップS3)。閾値Thrは、悪路ではない路面(通常の良路)を走行中における路面伝達振動の大きさRmaxより大きな値であり、悪路を走行中における路面伝達振動の大きさRmaxより小さな値である。第一伝達関数Gの同定処理に際して、路面伝達振動に起因した振動の影響をできる限り小さくするために、このような判定を行っている。
続いて、路面伝達振動の大きさRmaxが閾値Thr以下の場合には(ステップS3:Y)、第一伝達関数Gの同定処理を開始する(ステップS4)。一方、ステップS1,S2,S3の条件を満たしていない場合には、同定処理を開始することなく、同定処理開始判定の最初に戻る。
図3に戻り、伝達関数同定処理部200の構成について説明する。同定周波数設定部220は、同定処理開始判定部210により第一伝達関数Gの同定処理開始と判定された場合には、第一伝達関数Gを同定するための制御信号y(n)に用いる同定周波数fEstを設定する。この同定周波数fEstは、上述において図5を用いて説明したように、能動型振動騒音抑制装置100の制御対象周波数範囲であるfT1以上fT2以下の範囲について、所定間隔毎に設定される。例えば、同定周波数fEstは、30Hz以上70Hz以下の範囲において、1Hz間隔で設定される。
同定フィルタ係数設定部230は、同定処理開始判定部210により第一伝達関数Gの同定処理開始と判定された場合には、第一伝達関数Gを同定するための制御信号y(n)に用いる振幅フィルタ係数a(n)および位相フィルタ係数φ(n)を設定する。
制御信号生成部120は、上述した制御信号生成部120と実質的には同一である。ただし、伝達関数同定処理においては、制御信号生成部120は、同定周波数設定部220にて設定された同定周波数fEstおよび同定フィルタ係数設定部230にて設定された各同定フィルタ係数a(n),φ(n)に基づいて、式(1)に従って得られる制御信号y(n)を生成する。
発生装置130は、上述した発生装置130と同一であり、制御信号生成部120によって生成された制御信号y(n)に応じた制御振動や制御音を発生する。そして、評価点20においては、発生装置130によって発生された制御振動等が伝達系Bを介して振動または音Z(n)が伝達される。この振動または音Z(n)は、式(10)で表される。
残留信号検出部140は、上述したとおり、評価点20に配置されており、評価点20における振動または音e(n)を検出する。このときの評価点20における振動または音e(n)は、式(2)にて示したとおりである。ただし、伝達関数同定処理においては、エンジン10の周波数frealが、共振周波数fG0よりも十分に高い判定用の周波数範囲fE1〜fE2であり、かつ、同定すべき周波数である制御対象周波数範囲fT1〜fT2は異なる周波数に設定されている。そのため、上述したように、評価点20において、同定周波数fEstに関するエンジン10による発生振動または発生騒音の影響を小さくできる。従って、伝達関数同定処理においては、残留信号検出部140により検出される振動または音e(n)は、Z(n)の影響が非常に大きい。つまり、伝達関数同定処理において、式(2)は、式(11)と見なすことができる。
Ghデータ算出更新部240は、制御信号生成部120により生成された制御信号y(n)と、残留信号検出部140により検出された評価点20における振動または音e(n)と、同定周波数設定部220により設定した同定周波数fEstとに基づいて、第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGを算出する。このGhデータ算出更新部240は、Ghデータ記憶部150に既に記憶されているGhデータを新たに算出したGhデータに更新する。
このGhデータ算出更新部240による第一推定伝達関数Ghの算出更新処理について、図6のフローチャートを参照して説明する。図6に示すように、まず、Ghデータ算出更新部240は、制御信号y(n)と振動または音e(n)と同定周波数fEstとに基づいて、第一推定伝達関数Ghの振幅成分AhGおよび位相成分ΦhGを算出する(ステップS11)。続いて、第一推定伝達関数Ghについて、予め設定されたn回の算出処理を行ったか否かを判定する(ステップS12)。
n回の算出処理が行われていなければ(ステップS12:N)、算出処理回数がn回に達するまで、第一推定伝達関数Ghの算出処理を行う。一方、第一推定伝達関数Ghの算出回数がn回に達した場合には、n回の第一推定伝達関数Ghの平均値を算出する(ステップS13)。具体的には、振幅成分AhGと位相成分ΦhGのそれぞれについて、n回の平均値を算出する。このようにして算出された平均値としての第一推定伝達関数Ghの振幅成分AhGと位相成分ΦhGをGhデータ記憶部150に記憶する(ステップS14)。
このように、Ghデータ記憶部150に記憶されるGhデータは、例えばエンジン10の駆動中に何度も更新することができるため、現在の第一伝達関数Gの状態に適合したデータとなる。つまり、現在記憶されているGhデータは、第一伝達関数Gが経年変化したとしても、その経年変化に追従して更新されている。
さらに、車両走行中でエンジン10の駆動中に第一伝達関数Gの同定処理を行うことにより、車両停止中に同定処理を行う場合に比べて、乗員が同定処理に伴い発生する振動または騒音を感じにくくできる。つまり、乗員の不快感が少ない。ただし、走行中は、路面からの振動が車体に入力されるため、伝達関数の同定精度に影響を及ぼすおそれがある。しかし、路面伝達振動検出部190により検出される路面伝達振動の大きさRmaxが閾値Thr以下の場合に同定処理を行うようにしている。つまり、路面伝達振動が伝達関数の同定に影響の少なくなるタイミングにおいて、同定処理を行うようにしている。従って、路面伝達振動によって、第一伝達関数Gの同定精度が悪化することなく、高精度に第一伝達関数Gを推定することができる。
しかしながら、車両走行中でエンジン10の駆動中に第一伝達関数Gの同定処理を行うため、エンジン10による発生振動または発生騒音に起因して第一伝達関数Gの同定精度にばらつきを生じるおそれがある。例えば、瞬間的な第一伝達関数Gの推定値Ghは、実際の第一伝達関数Gとはずれた値となるおそれがある。
そこで、Ghデータ算出更新部240は、同定周波数fEstについて第一伝達関数Gの同定処理をn回行い、算出されたn回の第一推定伝達関数Ghの平均値を算出している。そして、算出した平均値としての第一推定伝達関数Ghを、Ghデータ記憶部150に記憶している。このように複数回の同定処理を行い、得られた複数の第一推定伝達関数Ghを平均化した値を更新する第一推定伝達関数Ghとする。これにより、エンジン10による発生振動または発生騒音に起因したばらつきが生じたとしても、適応制御に用いる第一推定伝達関数Ghはある程度安定した値となる。これにより、確実に評価点20における振動または騒音を抑制することができる。
さらに、同定処理開始判定部210は、車両走行速度がほぼ一定のときに第一伝達関数Gの同定処理を開始するようにしている。車両の走行速度が一定のときに同定処理を行うことで、車両の加減速に伴う振動または騒音が発生していないときに同定処理を行うことができる。これにより、高精度に第一伝達関数Gの推定値Ghを算出できる。
また、上述したように、同定処理開始判定部210は、エンジン10による発生振動または発生騒音の周波数frealが第一伝達関数Gの共振周波数fG0より十分に高い場合に、エンジン10による発生振動または発生騒音の周波数frealより小さい同定周波数fEstについて同定処理を行っている。これにより、同定処理により算出された第一推定伝達関数Ghをより高精度に得ることができる。
ところで、図2に示したように、評価点20をサスペンションメンバ340の車両左右方向中央部(図2における「A」の部位)に配置した場合に、残留信号検出部140は、「A」部位に配置することになる。この場合、路面伝達振動検出部190の配置場所を「A」部位とする場合であって、残留信号検出部140として振動を検出可能な加速度センサなどを適用した場合には、路面伝達振動検出部190と残留信号検出部140と部品共通化を図ることができる。これにより、低コスト化を図ることができる。
さらに、路面伝達振動検出部190と残留信号検出部140との両者をサスペンションメンバ340に取り付けることで、評価点20が位置する部材と同一体の振動に応じて同定処理を行うか否かを判定していることになる。従って、同定処理に影響を及ぼす振動が発生していない場合に、確実に同定処理を行うことができる。
また、路面伝達振動検出部190は、図2の「B」部位に配置するようにしてもよい。つまり、路面伝達振動検出部190は、ロッド350などのサスペンションをサスペンションメンバ340に懸架されるリアアクスル330(本発明における「車輪」に相当)に取り付けられる。この場合、路面伝達振動検出部190は、車輪そのものの振動の大きさを検出する。車輪は、路面の状況に最もよく反応する。そして、車輪の振動の大きさが閾値Thr以下の時に、第一伝達関数Gの同定処理を行うようにすることで、第一伝達関数Gの同定処理において路面の影響を確実に受けないようにできる。
20:評価点、 100:能動型振動騒音抑制装置、 200:伝達関数同定処理部
310:ディファレンシャル、 320:ドライブシャフト、 330:リアアクスル
340:サスペンションメンバ、 350:ロッド
360:ショックアブソーバ、 370:スプリング
310:ディファレンシャル、 320:ドライブシャフト、 330:リアアクスル
340:サスペンションメンバ、 350:ロッド
360:ショックアブソーバ、 370:スプリング
Claims (7)
- 車両において、制御信号y(n)に応じた制御振動または制御音を出力して、評価点における振動または騒音を能動的に抑制する能動型振動騒音抑制装置であって、
振動または騒音の発生源であるエンジンによる発生振動または発生騒音の周波数、適応フィルタ係数により構成される前記制御信号y(n)を生成する制御信号生成部と、
前記評価点において、前記制御信号y(n)に応じて出力された制御振動または制御音と前記発生源による振動または騒音との干渉による残留信号e(n)を検出する残留信号検出部と、
前記制御信号生成部と前記評価点との間の伝達関数の推定値を記憶する推定伝達関数記憶部と、
前記残留信号e(n)および伝達関数の推定値に基づいて、設定された評価関数を最小とするように前記適応フィルタ係数を更新する適応フィルタ係数更新部と、
車両走行中において路面から伝達される振動の大きさを検出する路面伝達振動検出部と、
車両走行中で前記エンジン駆動中であり、前記路面伝達振動検出部により検出される振動の大きさが閾値以下の場合に、前記エンジンによる発生振動または発生騒音の周波数と異なる同定周波数について前記制御信号を出力した場合の前記残留信号e(n)に基づいて前記伝達関数の同定処理を行い、算出された前記伝達関数の推定値を前記推定伝達関数記憶部に記憶させる伝達関数同定処理部と、
を備える能動型振動騒音抑制装置。 - 請求項1において、
前記伝達関数同定処理部は、前記同定周波数について前記伝達関数の同定処理を複数回行い、算出された複数の前記伝達関数の推定値の平均値を前記伝達関数の推定値として前記推定伝達関数記憶部に記憶させる能動型振動騒音抑制装置。 - 請求項1または2において、
前記伝達関数同定処理部は、車両走行速度が一定のときに前記同定処理を行う能動型振動騒音抑制装置。 - 請求項1〜3の何れか一項において、
前記伝達関数同定処理部は、前記エンジンによる発生振動または発生騒音の周波数が前記伝達関数の共振周波数より高い場合に、前記エンジンによる発生振動または発生騒音の周波数より小さい前記同定周波数について同定処理を行う能動型振動騒音抑制装置。 - 請求項1〜4の何れか一項において、
前記評価点は、前記サスペンションメンバであり、
前記路面伝達振動検出部は、前記サスペンションメンバに取り付けられ、前記サスペンションメンバの振動の大きさを検出する能動型振動騒音抑制装置。 - 請求項5において、
前記路面伝達振動検出部と前記残留信号検出部とは、同一のセンサを用いる能動型振動騒音抑制装置。 - 請求項1〜4の何れか一項において、
前記路面伝達振動検出部は、サスペンションを介してサスペンションメンバに懸架される車輪に取り付けられ、前記車輪の振動の大きさを検出する能動型振動騒音抑制装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011043625A JP2012179996A (ja) | 2011-03-01 | 2011-03-01 | 能動型振動騒音抑制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011043625A JP2012179996A (ja) | 2011-03-01 | 2011-03-01 | 能動型振動騒音抑制装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012179996A true JP2012179996A (ja) | 2012-09-20 |
Family
ID=47011592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011043625A Withdrawn JP2012179996A (ja) | 2011-03-01 | 2011-03-01 | 能動型振動騒音抑制装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012179996A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115217696A (zh) * | 2022-07-01 | 2022-10-21 | 奇瑞汽车股份有限公司 | 噪声控制方法、装置以及车辆制造方法 |
| JP2023144600A (ja) * | 2022-03-28 | 2023-10-11 | 本田技研工業株式会社 | 能動型騒音低減装置及び能動型騒音低減プログラム |
-
2011
- 2011-03-01 JP JP2011043625A patent/JP2012179996A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023144600A (ja) * | 2022-03-28 | 2023-10-11 | 本田技研工業株式会社 | 能動型騒音低減装置及び能動型騒音低減プログラム |
| JP7808501B2 (ja) | 2022-03-28 | 2026-01-29 | 本田技研工業株式会社 | 能動型騒音低減装置及び能動型騒音低減プログラム |
| CN115217696A (zh) * | 2022-07-01 | 2022-10-21 | 奇瑞汽车股份有限公司 | 噪声控制方法、装置以及车辆制造方法 |
| CN115217696B (zh) * | 2022-07-01 | 2024-03-01 | 奇瑞汽车股份有限公司 | 噪声控制方法、装置以及车辆制造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102408323B1 (ko) | 엔진 소음 상쇄를 위한 가상 위치 노이즈 신호 추정 | |
| JP5934037B2 (ja) | 能動型振動騒音抑制装置 | |
| CN102159426B (zh) | 有源噪声控制装置 | |
| JP3094517B2 (ja) | 能動型騒音制御装置 | |
| EP3537430B1 (en) | Method and apparatus for a low cost, acoustic tire cavity resonance canellation | |
| US9857776B2 (en) | Vehicle vibration reduction system | |
| CN102097094B (zh) | 有源降噪装置 | |
| CN102610226B (zh) | 有源振动噪音控制装置 | |
| CN108604444A (zh) | 有源振动噪声控制装置和有源振动噪声控制电路 | |
| JPH04273B2 (ja) | ||
| JPWO2012157577A1 (ja) | 能動型消音装置 | |
| JP2012201241A (ja) | 能動型振動騒音抑制装置 | |
| JP2014065375A (ja) | 能動型消音装置 | |
| JP2012179996A (ja) | 能動型振動騒音抑制装置 | |
| JP5752928B2 (ja) | 能動型振動騒音抑制装置 | |
| JP7641702B1 (ja) | 能動型騒音低減装置 | |
| JP5846776B2 (ja) | 能動型振動騒音抑制装置 | |
| JP2012168283A (ja) | 能動型振動騒音抑制装置 | |
| JP2011179553A (ja) | 車両の振動低減システム | |
| JP3293922B2 (ja) | 能動型騒音制御装置 | |
| JP2022111608A (ja) | 能動騒音制御装置及び車両 | |
| JP7538774B2 (ja) | ロードノイズ低減装置、ロードノイズ低減方法及びロードノイズ低減プログラム | |
| JPH04342296A (ja) | 能動型不快波制御装置 | |
| JP2012140042A (ja) | 能動型振動騒音抑制装置 | |
| JPH089758Y2 (ja) | 車室内騒音の低減装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |