JP2012180936A - プラントにおける電動弁の動作性能予測方法 - Google Patents
プラントにおける電動弁の動作性能予測方法 Download PDFInfo
- Publication number
- JP2012180936A JP2012180936A JP2012116053A JP2012116053A JP2012180936A JP 2012180936 A JP2012180936 A JP 2012180936A JP 2012116053 A JP2012116053 A JP 2012116053A JP 2012116053 A JP2012116053 A JP 2012116053A JP 2012180936 A JP2012180936 A JP 2012180936A
- Authority
- JP
- Japan
- Prior art keywords
- valve
- torque
- operating force
- valve body
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Sliding Valves (AREA)
- Electrically Driven Valve-Operating Means (AREA)
- Mechanically-Actuated Valves (AREA)
- Indication Of The Valve Opening Or Closing Status (AREA)
- Details Of Valves (AREA)
Abstract
【解決手段】弁体4の開閉時において、弁体位置検出手段18,19によって得られる弁体4の特定位置における弁体駆動力検出センサ38が検出した駆動力とそのときの流体圧力と、弁全閉時の前後の差圧に基づいて、今後の動作時において、制御流路に想定される圧力環境の基に、弁装置3の構造型式に応じた必要操作力計算式に当て嵌めて、現時点で得られる最大操作力を求め、この最大操作力と予め設計時に求めた設計操作力との差を、操作力の余裕度として求め、電動弁1の今後の動作時において、どの程度の期間、設計操作力を出し続けられるか否かを判定する。
【選択図】図2
Description
Fc=F1+F2+F3 (N) ……(1c)
F1 :弁体・弁座面の摺動抵抗力(非特許文献1ではT1)
F2 :弁棒押上力(非特許文献1ではT 3 )
F3 :パッキン摺動抵抗力(非特許文献1ではT4)
Fo=max(F1、F4)−F2+F3+F5+F6 (N) ……(1o)
F4 :モータの慣性による弁体の食い込み抵抗力
(非特許文献1ではT2)
F5 :弁棒が熱膨張することによる弁体の食い込み抵抗力
(非特許文献1ではT5)
F6 :弁箱内に圧力がこもることによる抵抗力
(非特許文献1ではT6)
FR(=F3)=K×π×d2×N×h×P0
ここで、K :グランドパッキンの摩擦係数
d2 :弁棒径(m)
N :パッキン有効リング数
(圧縮後の相当リング数)
h :パッキン1リング高さ(m)
P0 :パッキン締付面圧(Pa)
また、弁
k=D2×μ
FΔP=k×ΔP (N)
Fc=FR+FP+FΔP …………………………(1C)
また、FR=F 3 、FP=F2、F 1 =FΔPとして、
Fc=F1+F2+F3 …………………………(1C)
として、表すことができる。
F1=(π/4)×D2 2 ×μ×ΔP=k×ΔP (N)
ここで、D2 :弁座当り面外径 (m)
ΔP:弁差圧 (Pa)
μ :シート面の摩擦係数
:弁棒押上げ力
弁捧07は、内圧Pによって、弁箱06の内部から大気に押し出されるピストンの如き力を受ける。この力、すなわち弁棒07を弁箱06の内部の圧力Pに打ち勝って押し込むための加重である。
F2=(π/4)×d22×P (N)
ここで、d2 :弁棒径 (m)
P :弁内圧 (Pa)
・
なお、グランドパッキン08の摺動抵抗力FRの計算式は、次のようになる。
FR(=F3)=K×π×d2×N×h×P0 (N)
ここで、K :グランドパッキンの摩擦係数
d2 :弁棒径 (m)
N :パッキン有効リング数
(圧縮後の相当リング数)
h :パッキン1リング高さ (m)
P0 :パッキン締付面圧 (Pa)
F4={(L/π)×β×K×E+TS 2 )} 1/2 /β(N)
ここで、L :ステムのねじリード
K :弁体・弁棒・駆動装置血バネの総パネ定数
β :スラスト対トルク変換係数(ステムネジ係数)
E :モータの慣性エネルギー (Nm)
TS :モータ停止時の出力トルク(設定トルク) (Nm)
弁棒の熱膨張により閉方向に生じる推力で、押し込まれた弁棒を引き抜く荷重である。
F5=K×Δl (N)
K :総バネ定数(弁棒、駆動装置、弁体)
Δl :ステムの弁箱に対する相対伸び (m)
弁箱胴部圧力(P3)と弁出入口圧力(P1、P2)の差圧による押付力が作用する。
この押付力によって押し込まれた弁体を引き抜くために要する荷重である。
プラントにおける制御流路を、電動弁により実際に開路もしくは閉路した実開閉時に、弁装置における弁開閉区間の弁開閉度に対応する弁体駆動力を、弁体駆動力検出センサにより検出し、弁体が閉または開する直前の過渡データ生成区間を省いた弁開閉区間における弁体駆動力の中から、弁体を駆動するのに要した最大の駆動力を、そのときの流体圧力と、弁全閉時の前後の差圧を合算して、当該電動弁における実開閉時の必要操作力として注出し、この必要操作力を、弁装置の構造型式に応じた必要操作力計算式に当て嵌めて、現在の実開閉時における制御流路の圧力環境の基に、当該電動弁において経時的に変動するパラメータの現在値を求め、これにより求められたパラメータの現在値を、以後の動作時において、制御流路に想定される圧力環境の基に、前記計算式に当て嵌めて、現時点で得られる最大操作力を求め、さらにこの最大操作力と予め設計時に求めた設計操作力との差を、操作力の余裕度として求め、当該電動弁の今後の動作時において、如何なる程度の期間に亘って、設計操作力を出し続けられるか否かを判定する。
請求項1記載の発明によると、電動弁における実稼働状態において、弁装置の構造に掛かる各変動パラメータ(経時的に変動するパラメータ)を、弁体駆動力検出センサの検出値やそのときの流体圧力と、弁全閉時の弁前後の差圧から、それぞれに変動パラメータの現在値として求めて、その各パラメータを、弁装置駆動に所要される必要操作力を求める計算式に当てはめて、現時点で得られる最大操作力と予め設計時に求めておいた設計操作力との差を求め、その差を操作力の余裕度として数値化することができ、その余裕度の値は、電動弁が稼働する毎に求められて順次更新され、その余裕度の値の変化を追跡することにより、当該電動弁が設計操作力を、如何なる程度の期間に亘って、発揮しうるかどうかを、容易に判定することができる。
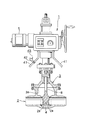
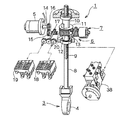
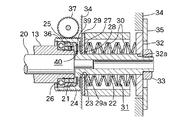
図1〜図3は、本発明方法を具体的に適用する電動弁の一例を示すもので、 図1は、弁形式を仕切弁とした電動弁の要部を切欠して示す正面図、図2は、図1に示す電動弁の分解斜視図、図3は、図2に示す、トルクセンサの拡大縦断面図である。
操作力Fは、前述の如く、流体圧力Pに依存する弁体の駆動力FPと、差圧ΔPに依存する弁棒を弁箱から押しだす推力FΔPと、流体圧力Pに依存しない摺動抵抗力FRによて定まる。
F又はFc=FP+FΔP+FR (N) ……(1)
推力FPは、既知の弁棒断面積Dと圧力Pの積として算出できる。
FP=D×P (N) ……(2)
なお、推力Fpは、弁体の操作方向によって符号が正負逆になる。
例えば、仕切弁が弁を開くときには、弁棒に操作力を加える方向と推力が働く方向と同じになるので、負荷を駆動する動力側から見た符号は−となり、弁を閉じるときには、同符号は+となる。
駆動力FΔPは、差圧ΔPと弁固有の係数kの積として算出できる。
FΔP=ΔP×k (N) ……(3)
バルブ開度が大きく操作力が安定している区間は、差圧ΔPにより発生する抗力が無視できる領域で、この部分では弁体による差圧の影響はないと考えられる。
差圧ΔP=0からFΔP=0
F=FP+FR (N) ……(4)
よって FRは、
操作時に弁棒が弁箱に挿入するときFR=F c −FP ……(4a)
操作時に弁棒が弁箱から挿出するときFR=F o +FP ……(4b)
として求めることができる。
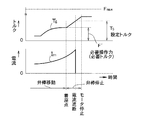
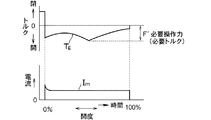
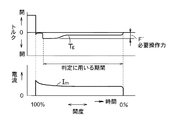
図4〜図7は、図1〜図3に示す弁装置3の弁形式を仕切弁とした、電動弁1における弁開閉状態のタイムチャートを示す。
なお、トルク信号Tg、及びびその信号から計測される各トルクの値とは、第1式の操作力Fとの間に、F=a・Tg(aは、後述するステムテムファクタSf等)とする一定の比例関係が成立しているので、以下の各タイムチャートに基づく説明においては、トルク値を使用する。
採取したデータより、トルクリミットスイッチ39が動作してモータ電流を遮断した時点における、トルクスイッチ39に予め設定された設定トルクTsの値を読み取る。
予め、初期データとして、次のものがデータベースに登録してある。
Tm :定格電圧におけるモータ出力トルク (Nm)
Tmd:電圧降下時におけるモータ出力トルク (Nm)
GR :減速比
E :効率
Sf :ステムファクター
弁が閉じ始める開度100%付近で操作力が安定している部分(図4において左側で過渡的変化が過ぎた部分)には、弁体4による差圧ΔPの影響がない(Δp=0)と考えられるので、かつ仕切弁が閉じるときには、弁棒が弁箱に挿入されることから、摺動抵抗力FR′は、式(4b)から、FR=F−FPとして求められる。
差圧の影響が大きく、最も大きな操作力Fc′が必要となる点、図5における弁体が着座して、トルク特性が直線的に増大する直前の値を、このときの必要操作力Fc′として波形から読みとり、この値を必要操作力Fc′として、第(1)式に当て嵌める。
Fc′=FP′+FΔP′+FR′ (N) ……(1a)
と表せる。
弁装置3を閉じる時の圧力をP′(別途測定されている)とすると
FP′=P′×D、FR=FR′と表せる。
この時点でFc′、FP′、FR′は求められているので
FΔP′は、
FΔP′=Fc′−FP′−FR′と ……(3′)
として求めることができる。
任意(設計値)の圧力P″、差圧ΔP″時に、弁を確実に作動させるために必須(設計値)な操作力Fc″を、式(1a)から算出する。
Fc″=(P″×D)+(ΔP″×k)+FR (N) ……(1b)
弁固有の差圧に対する係数kは、k=FΔP′/ΔPとなる。
駆動部が発生できる最大の操作力Fmaxは、前記準備した各パラメータから
Fmax=Tm×GR×E/S f ……(5)
よって、仮想的に求められる最大出力トルクTmaxは、前記比例関係式から、
Tmax=F max ×S f (Nm)
として求めることが出来る。
Tmd=Tm×(降下時の電圧/定格電圧)2 (Nm) ……(6)
前記(a)において測定した設定トルクTs、前記(f)において求めた必要(設計値)操作力F″、(h)において求めた駆動部の最大操作力Fmaxから、 駆動部余裕度Ya=Fmax−(T s /Sf)、機構部余裕度Yb=(T s /Sf)−F″として、数値化して求め、設計値を条件としてその条件下において、電動弁1が設計操作力を得られるか否かを判定する。
設定トルクTs≧ 操作力Fmaxであれば動作しない。
理由 弁が全閉する前にトルクスイッチ38が動作して完動しない。
駆動部余裕度Ya=Fmax−(T s /S f ) (N)
設定トルクTs< 操作力Fmaxあれば動作可能である。
機構部余裕度Yb=(T s /S f )−F″ (N)
Ya、Ybの値は、それぞれ駆動部と機構部の裕度として使用できる(図16参照)。
なお、図中点線で示す波形は、無負荷運転時のトルク特性で、流体圧が加わると、引抜きトルクTqの上昇があることが判る。
また、無負荷運転において測定された引抜きトルクTqの値によっても、将来の弁開時の必要操作力F′を、予測することができる。
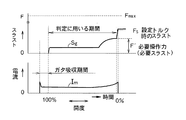
トルクTの値は、バタフライ弁の各開度毎に算出し、その内の最大値が、操作に必須な必要トルクTmax(前記必要操作力F′に対応する)となる。
Tmax:操作に必須な必要トルク(Nm)
Td:弁体が流体から受ける水力トルク(Nm)
=Ct×D d 3 ×ΔP
Ct:水力トルク係数
Dd:弁体直径(m)
ΔP:弁体の前後差圧(Pa)
T s :全閉時弁体がシートに食い込む際のシート押圧トルク
=P s ×π×D d ×b×(D d /2)×0.64×μs (Nm)
Ps:弁座接触圧力(Pa)
b:弁座接触幅(m)
Ps:弁座接触圧力(Pa)
μs:弁座摩擦係数
Tb:軸受、グランドパッキン等の摩擦トルク
=(π/4)×D d 2 ×ΔP×(d/2)×q b (Nm)
d:弁棒直径(m)
qb:軸受け、グランドパッキン等の摩擦係数
Th :静水的トルク:弁が横軸の時のみ適用
=ρ×g×I x (Nm)
ρ:水の単位体積当たりの質量(1000kg/m 3 )
g:重力加速度(9.8m/s 2 )
I x :円板の慣性モーメント(m 4 )
シート押圧トルクTcと摩擦トルクTbは、全閉位置で最大となる。
大口径の弁の場合、水力トルクTdがトルクの大部分を占めて中間開度で最大値となる。
以下 、前記(a)〜(i)ステップと同様にして、判定を行う
図11、図12は、図1〜図3に示す弁装置3の弁形式を、玉形弁とした電動弁1における弁開閉状態のタイムチャートを示す。
弁体下面よりの流体圧力P′を加える場合を例にとると、必要操作力F′は、弁体の後側が圧力零のときに、
F′=F s1 ′+F s2 ′+F R ′ (N)
と表せる。
Fs1′=(π/4)×d 2 ×P
d:弁座内径(m)
P:流体圧力(Pa)
F s2 ′=(π/4)×(do 2 −d 2 )K1×P
do:弁座当たり面外径 (m)
K1:面圧係数
FR′=K×π×d S ×N×h×P 0 ×χ (N)
K:グランドパッキンの摩擦係数
dS:弁棒径 (m)
N:パッキン有効リング数
(圧縮後の相当リング数)
h:パッキン1リング高さ (m)
P0:パッキン締付面圧 (Pa)
χ:ダブルパッキン係数
(シングルパッキンの場合1.0)
また、ロックナット48の上方には、これを回転させるためのハンドルを係合する孔48eが設けられている。
この実施例に示すように、弁体4を直接駆動するスラスト力を直接測定すると、トルクを操作力に変換するステムファクタSfを考慮しなくて済むので、演算処理やデータベースの構造を簡単にすることができる。
このように、電動弁1の今後の動作機会において、どの程度の期間、設計操作力を出し続けられるか否かを判定することができる。
また、グランドボルトを片締した場合の、パッキンが劣化した場合にも、グランド抵抗が大きくなり、前回駆動時と最終駆動時のデータを比較して、機構部の劣化の度合を求めることができる。
制御流路
弁装置
3a 弁箱
弁体
電動モータ
伝動機構
弁体駆動力検出センサ(トルクセンサ、)
7A 弁体駆動力検出センサ(スラストセンサ)
ステム(弁棒)
8a 雄ネジ
ステムネジ
ステムナット
10A ステムナット
ウオームホイール
ウオーム
ウオーム軸
出力軸
歯車
歯車
減速歯車手段
弁全閉検出リミットスイッチ
弁全開検出リミットスイッチ
軸
軸端
トルクバネ軸
対向軸端
拡径軸
内腔
スラストラジアル軸受
鍔
外側段部
バネ押し板
板バネ
トルクバネ
バネ押し板
予圧ナット
壁面
押さえ板
ネジ条
ピニオン
トルクリミットスイッチ
歪みセンサ
歪み検知機
動力線
電流計
弁体位置検出手段
ドライブスリーブ
44e 上端
通孔
45a 通孔
45b スプライン孔
45c 雌ネジ
45d 縮径段部
縮径段部
スプライン軸
ロックナット
48a 拡径雄ネジ
48b 通孔
48c 筒部
48d 逆雄ネジ
締付けナット
49a 逆雌ネジ
48f 円周溝
48e 孔
歪みセンサ
Claims (3)
- プラントにおける制御流路に配設した弁装置と、弁装置を開閉駆動する電動モータと、その電動モータにより弁体を開閉移動する伝動機構と、伝動機構に連係して弁体の開閉に要する駆動力を電気的に検出する弁体駆動力検出センサを備える電動弁において、
プラントにおける制御流路を、電動弁により実際に開路もしくは閉路した実開閉時に、弁装置における弁開閉区間の弁開閉度に対応する弁体駆動力を、弁体駆動力検出センサにより検出し、弁体が閉または開する直前の過渡データ生成区間を省いた弁開閉区間における弁体駆動力の中から、弁体を駆動するのに要した最大の駆動力を、そのときの流体圧力と、弁全閉時の前後の差圧とを合算して、当該電動弁における実開閉時の必要操作力として注出し、この必要操作力を、弁装置の構造型式に応じた必要操作力計算式に当て嵌めて、現在の実開閉時における制御流路の圧力環境の基に、当該電動弁において経時的に変動するパラメータの現在値を求め、これにより求められたパラメータの現在値を、今後の動作時において、制御流路に想定される圧力環境の基に、前記計算式に当て嵌めて、現時点で得られる最大操作力を求め、さらにこの最大操作力と予め設計時に求めた設計操作力との差を、操作力の余裕度として求め、当該電動弁の以後の動作時において、如何なる期間に亘って、設計操作力を出し続けられるか否かを判定することを特徴とするプラントにおける電動弁の動作性能予測方法。 - 弁体駆動力検出センサは、伝動機構において、弁棒に直結してウオームホイールに噛合するウオームの軸線方向移動に対応するトルク値を検出するトルクセンサである、請求項1記載のプラントにおける電動弁の動作性能予測方法。
- 弁体駆動力検出センサは、伝動機構において、弁棒に直結して、弁棒に加わるスラスト値を検出するスラストセンサである、請求項1記載のプラントにおける電動弁の動作性能予測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012116053A JP5330568B2 (ja) | 2012-05-21 | 2012-05-21 | プラントにおける電動仕切弁の動作性能予測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012116053A JP5330568B2 (ja) | 2012-05-21 | 2012-05-21 | プラントにおける電動仕切弁の動作性能予測方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007231770A Division JP5230981B2 (ja) | 2007-09-06 | 2007-09-06 | プラントにおける電動仕切弁の動作性能予測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012180936A true JP2012180936A (ja) | 2012-09-20 |
| JP5330568B2 JP5330568B2 (ja) | 2013-10-30 |
Family
ID=47012287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012116053A Active JP5330568B2 (ja) | 2012-05-21 | 2012-05-21 | プラントにおける電動仕切弁の動作性能予測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5330568B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107631075A (zh) * | 2017-11-13 | 2018-01-26 | 佛山市恒爱网络科技有限公司 | 一种消防信号闸阀 |
| CN111322446A (zh) * | 2020-03-12 | 2020-06-23 | 宁波亿林节水科技股份有限公司 | 一种智控蜗轮蜗杆副无级定位球阀控制系统及物联网自动灌溉系统 |
| CN113652346A (zh) * | 2021-08-30 | 2021-11-16 | 成都微康生物科技有限公司 | 一种全自动pcr分析系统旋转阀驱动装置 |
| CN115855470A (zh) * | 2022-12-09 | 2023-03-28 | 中广核核电运营有限公司 | 气动阀检测系统及气动阀检测方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH074549A (ja) * | 1993-06-16 | 1995-01-10 | Toa Valve Kk | 電動弁の自己診断装置 |
| JPH07159285A (ja) * | 1993-12-13 | 1995-06-23 | Toshiba Corp | 弁の動特性診断装置 |
| JPH07280705A (ja) * | 1994-04-14 | 1995-10-27 | Toshiba Corp | 弁のオンライン診断装置 |
| JP2003194671A (ja) * | 2002-09-27 | 2003-07-09 | Japan Atom Power Co Ltd:The | 弁装置の機能診断方法 |
-
2012
- 2012-05-21 JP JP2012116053A patent/JP5330568B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH074549A (ja) * | 1993-06-16 | 1995-01-10 | Toa Valve Kk | 電動弁の自己診断装置 |
| JPH07159285A (ja) * | 1993-12-13 | 1995-06-23 | Toshiba Corp | 弁の動特性診断装置 |
| JPH07280705A (ja) * | 1994-04-14 | 1995-10-27 | Toshiba Corp | 弁のオンライン診断装置 |
| JP2003194671A (ja) * | 2002-09-27 | 2003-07-09 | Japan Atom Power Co Ltd:The | 弁装置の機能診断方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107631075A (zh) * | 2017-11-13 | 2018-01-26 | 佛山市恒爱网络科技有限公司 | 一种消防信号闸阀 |
| CN111322446A (zh) * | 2020-03-12 | 2020-06-23 | 宁波亿林节水科技股份有限公司 | 一种智控蜗轮蜗杆副无级定位球阀控制系统及物联网自动灌溉系统 |
| CN113652346A (zh) * | 2021-08-30 | 2021-11-16 | 成都微康生物科技有限公司 | 一种全自动pcr分析系统旋转阀驱动装置 |
| CN113652346B (zh) * | 2021-08-30 | 2023-08-29 | 成都微康生物科技有限公司 | 一种全自动pcr分析系统 |
| CN115855470A (zh) * | 2022-12-09 | 2023-03-28 | 中广核核电运营有限公司 | 气动阀检测系统及气动阀检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5330568B2 (ja) | 2013-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5487302A (en) | Method and system for measuring gate valve clearances and seating force | |
| EP0354240B1 (en) | Method and apparatus for monitoring and measuring dynamic loads in thrust inducing systems | |
| CA1236901A (en) | Microprocessor-based control and diagnostic system for motor operated valves | |
| US5430368A (en) | Method for remotely approximating the stem thrust of motor operated valves | |
| US4759224A (en) | Torque measuring system for motor operated valve operators | |
| CN108350913B (zh) | 具有旋转位置输出的线性致动器 | |
| US6240789B1 (en) | Permanently instrumented actuated valve assembly, with internally-gauged, permanently instrumented shaft | |
| JP2012180936A (ja) | プラントにおける電動弁の動作性能予測方法 | |
| US20090013752A1 (en) | Method and apparatus for diagnosing motor-operated valve | |
| US5009101A (en) | Method and apparatus for monitoring and measuring dynamic loads in thrust inducing systems | |
| JPH11315955A (ja) | 蒸気タ―ビン弁用のメンテナンス・モニタシステム | |
| US20100263433A1 (en) | Valve testing | |
| CN104913870B (zh) | 摩擦力测量装置及测量方法 | |
| KR101181008B1 (ko) | 모터구동밸브의 실시간 성능 진단방법과 이를 이용한 진단시스템 | |
| JP5230981B2 (ja) | プラントにおける電動仕切弁の動作性能予測方法 | |
| US5432436A (en) | Method for remotely approximating the stem thurst of motor operated valves | |
| JP3841739B2 (ja) | ねじ摩耗量検出装置 | |
| US5140853A (en) | Method and apparatus for monitoring and measuring dynamic loads in thrust inducing systems | |
| CN110849736A (zh) | 一种压力测试工装及其使用方法 | |
| US5174152A (en) | Power operated valve stem thrust verification test system | |
| CN211477893U (zh) | 一种压力测试工装 | |
| WO2019143356A1 (en) | Torque operator for valves with a rising valve stem | |
| Kim et al. | A study on a characteristic of stem friction coefficient for motor operated flexible wedge gate valve | |
| KR100332576B1 (ko) | 모터 구동 밸브의 작동성 측정 방법 | |
| CN116557619A (zh) | 一种适用于真空阀的小型手动操纵机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130725 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5330568 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |