以下に、本発明の実施形態にかかる車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
(実施形態)
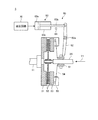
図1から図9を参照して、実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、実施形態の第二学習制御の動作を示すフローチャート、図2は、実施形態の車両制御装置1−1を搭載したハイブリッド車両を示す図である。
本実施形態に係るハイブリッド車両100は、トランスミッションの出力軸2Bに固定もしくは切替え可能なモータジェネレータ3と、摩擦クラッチ5とを有する変速機2を備えている。車両制御装置1−1は、ハイブリッド車両100においてクラッチ5の特性変化の学習を行う。基本動作として、定常走行中にクラッチトルクを徐々に減少させながらエンジン回転数を検出し、エンジン回転数が一定以上を検知すると、クラッチ5を係合させる。クラッチ係合の際にエンジン回転加速度に基づいてエンジントルクとクラッチトルクとの均衡を検出すると、エンジントルクに基づいてクラッチトルクを学習する。また、モータジェネレータ3の出力トルクにより学習中における運転者の操作の変化に対応することができる。
更に、エンジントルクを変化させずにモータジェネレータ3の出力トルクによって走行トルクを調整することで、学習を行うトルクを広い範囲から選択することができる。本実施形態の車両制御装置1−1によれば、運転者の操作に応じたトルクとは異なるトルクをクラッチ5に入力して学習を行うことができる。よって、本実施形態の車両制御装置1−1によれば、学習を行うトルクを能動的に決めることができるため、学習するトルクに偏りが生じることを抑制することができる。
本実施形態は、以下の要素を備える車両を前提としている。
(1)モータ(トランスミッション出力軸に接続されているもの。ただし、入力軸への接続やニュートラル等の切替えが可能であってもよい)。
(2)トランスミッション入力軸の回転を検出できるセンサ。
(3)エンジン回転数を検出できるセンサ。
(4)クラッチ操作を自動的に行う機構とアクチュエータ。
図2において、符号100は、本実施形態に係る車両制御装置1−1が搭載されたハイブリッド車両を示す。車両制御装置1−1は、エンジン1、変速機2、モータジェネレータ3、クラッチ5およびECU30を備える。
エンジン1は、ハイブリッド車両100の動力源であり、燃料の燃焼エネルギーをクランクシャフト11の回転運動に変換して出力する。本実施形態のエンジン1は、クラッチ5を介して駆動輪16と接続された第一動力源である。
変速機2は、自動制御式マニュアルトランスミッション(AMT;Automated Manual Transmission)である。変速機2は、アクチュエータによって変速操作(ギア段の切り替え)が自動的に行われる。変速機2は、入力軸2A、出力軸2Bおよび相互にギア比が異なる複数のギア対21,22,23,24を有する。入力軸2Aは、クラッチ5を介してエンジン1のクランクシャフト11に接続されている。各ギア対21,22,23,24の一方は入力軸2Aに配置されており、他方は出力軸2Bに配置されている。各ギア対21,22,23,24は、常時噛み合っており、シンクロメッシュ機構によって、入力軸2Aと出力軸2Bとの間で動力を伝達する動力伝達状態と、入力軸2Aと出力軸2Bとの間で動力を伝達しない非伝達状態とに切り替えられる。
変速機2のアクチュエータは、シンクロメッシュ機構を作動制御することにより、各ギア対21,22,23,24のいずれかを動力伝達状態とし、他のギア対を非伝達状態にすることができる。これにより、変速機2において動力伝達状態とされたギア対に応じた変速比で入力軸2Aから出力軸2Bに回転を伝達することができる。また、変速機2のアクチュエータは、全てのギア対21,22,23,24を非伝達状態として変速機2をニュートラル状態とすることができる。
変速機2の出力軸2Bには、モータジェネレータ3が連結されている。モータジェネレータ3は、出力軸2B、入力軸2Aおよびクラッチ5を介してエンジン1と接続されている。また、モータジェネレータ3は、出力軸2B、後述する差動機構12およびドライブシャフト14を介して駆動輪16と接続されている。つまり、モータジェネレータ3は、クラッチ5を介さずに駆動輪16と接続された第二動力源である。
モータジェネレータ3は、ステータ3aおよびロータ3bを有する。モータジェネレータ3は、電力の供給により駆動する電動機としての機能(力行機能)と、機械エネルギーを電気エネルギーに変換する発電機としての機能(回生機能)とを兼ね備えている。モータジェネレータ3としては、例えば、交流同期型のモータジェネレータを用いることができる。ロータ3bは出力軸2Bに対して一体回転可能に連結されている。バッテリ4は、充放電が可能な蓄電装置である。バッテリ4は、モータジェネレータ3と電気的に接続されており、モータジェネレータ3と電力を授受できる。
出力軸2Bには、出力軸2Bと一体に回転するドライブピニオンギア26が設けられている。ドライブピニオンギア26は、差動機構12のリングギア13と噛み合っている。エンジン1からクラッチ5および入力軸2Aを介して伝達される動力と、モータジェネレータ3から出力される動力とは、出力軸2Bにおいて合成され、差動機構12およびドライブシャフト14を介して駆動輪16に伝達される。
クラッチ5は、摩擦係合式のクラッチ装置であり、入力される制御量によって係合度合いを制御可能なものである。図3は、クラッチ5の詳細を示す図である。本実施形態のクラッチ5は、乾式単板の摩擦クラッチである。クラッチ5は、フライホイール51、クラッチディスク52、プレッシャプレート53、ダイヤフラムスプリング54、クラッチカバー55および制御部60を有している。
フライホイール51は、クランクシャフト11に連結されており、クランクシャフト11と一体回転する。フライホイール51には、クラッチカバー55が一体回転可能に取付けられている。クラッチディスク52は、変速機2の入力軸2Aに対してスプライン嵌合によって取付けられている。クラッチディスク52は、入力軸2Aに対して軸方向に相対移動可能で、かつ相対回転不能となっている。クラッチディスク52は、軸方向においてフライホイール51と対向している。
プレッシャプレート53は、クラッチディスク52を挟んでフライホイール51と軸方向において対向している。プレッシャプレート53は、円環形状であり、径方向の中心部に入力軸2Aが挿入されている。ダイヤフラムスプリング54は、クラッチディスク52およびプレッシャプレート53を挟んでフライホイール51と軸方向において対向している。ダイヤフラムスプリング54は、円環形状であり、半径方向の中間部においてクラッチカバー55によって支持されている。
ダイヤフラムスプリング54は、プレッシャプレート53をフライホイール51に向けて押圧することでクラッチ5を係合させることができる。ダイヤフラムスプリング54は、その外周部がプレッシャプレート53に当接してプレッシャプレート53に付勢力を作用させることができるように、クラッチカバー55によって支持されている。ダイヤフラムスプリング54の付勢力により、クラッチディスク52とプレッシャプレート53、およびフライホイール51とクラッチディスク52がそれぞれ係合して摩擦力を発生する。この摩擦力により、クランクシャフト11と入力軸2Aとの間でクラッチ5を介して動力が伝達される。ダイヤフラムスプリング54の付勢力は、クラッチ5の係合力に対応している。
制御部60は、クラッチ5の係合度合いを制御するものである。制御部60は、レリーズベアリング61、レリーズフォーク62、アクチュエータ63を有する。レリーズベアリング61は、入力軸2Aに嵌合しており、入力軸2Aに対して軸方向に相対移動可能である。レリーズベアリング61は、ダイヤフラムスプリング54における半径方向の内側端部に当接している。
アクチュエータ63は、油室63aを有するシリンダ63cと、ピストンロッド63bとを有する。アクチュエータ63は、油室63aの油圧によってピストンロッド63bをシリンダ63cの軸方向に進退させる。レリーズフォーク62は、支点62aにおいて回動自在に支持されている。レリーズフォーク62の一端はレリーズベアリング61に連結されており、他端はピストンロッド63bに連結されている。油室63aに油圧が供給されてピストンロッド63bがシリンダ63cから突出する方向に前進すると、レリーズフォーク62はレリーズベアリング61をフライホイール51側(矢印Y1参照)に移動させる。これにより、レリーズベアリング61は、ダイヤフラムスプリング54の中央部を押圧する。この押圧力により、ダイヤフラムスプリング54がプレッシャプレート53を押圧する押圧力が低減する。
ダイヤフラムスプリング54がプレッシャプレート53を押圧する押圧力の大きさに応じて、クラッチ5において伝達可能な最大トルク、すなわちクラッチ5のクラッチトルクが変化する。以下の説明では、このクラッチ5において伝達可能な最大トルクを「クラッチトルク」と記載する。クラッチトルクは、油圧回路70からアクチュエータ63の油室63aに供給される油圧に応じて変化し、また、ピストンロッド63bの進退量、すなわちクラッチストロークに応じて変化する。制御部60は、クラッチストロークを検出するクラッチストロークセンサ64を有する。クラッチストロークセンサ64は、ピストンロッド63bの軸方向の移動量を検出する。
アクチュエータ63は、油圧回路70によって調圧されて供給される制御油圧によってクラッチストロークを調節することにより、クラッチトルクを制御することができる。制御油圧は、クラッチ5に入力される制御量である。アクチュエータ63は、制御油圧に応じてクラッチストロークを任意に制御することができる。これにより、アクチュエータ63は、クラッチ5を、完全係合状態、半係合状態、解放状態の3つの状態に制御することができる。完全係合状態とは、フライホイール51とクラッチディスク52とが係合し、かつ等しい回転数で一体に回転する状態である。半係合状態とは、フライホイール51とクラッチディスク52とが係合し、かつ互いに異なる回転数で回転する状態である。解放状態とは、フライホイール51とクラッチディスク52とが離間して動力を伝達しない状態である。また、アクチュエータ63は、クラッチ5の半係合状態における動力の伝達度合いを制御することが可能である。
クラッチストロークが最も小さい領域では、クラッチトルクは最も大きく、クラッチ5は完全係合状態となる。クラッチストロークが増加するにつれてクラッチトルクは減少し、入力されるトルクよりもクラッチトルクが小さくなるとクラッチ5は半係合状態となる。クラッチストロークが最も大きい領域では、クラッチトルクは0となり、クラッチ5が解放され、動力を伝達しない解放状態となる。
ECU30は、周知のコンピュータを有する電子制御ユニットである。ECU30は、ハイブリッド車両100の走行制御を行う走行制御装置としての機能を有している。また、本実施形態のECU30は、クラッチ5に関する学習制御を行う学習部としての機能を有している。ECU30には、エンジン1、変速機2、モータジェネレータ3、クラッチ5および油圧回路70が接続されており、エンジン1、変速機2、モータジェネレータ3、クラッチ5および油圧回路70は、それぞれECU30によって制御される。
また、ECU30には、クラッチストロークセンサ64、変速機2の入力軸2Aの回転数を検出する入力軸回転数センサ、エンジン1の回転数を検出するエンジン回転数センサが接続されている。以下の説明では、変速機2の入力軸2Aの回転数を単に「入力軸回転数」と記載する。クラッチストロークセンサ64によって検出されたクラッチストロークを示す信号、入力軸回転数センサによって検出された入力軸回転数を示す信号およびエンジン回転数センサによって検出されたエンジン回転数を示す信号は、それぞれECU30に出力される。また、ECU30には、バッテリ4の充放電状態や電圧等を検出するセンサが接続されている。ECU30は、このセンサによる検出結果に基づいて、バッテリ4の充電状態SOCを取得することができる。
ECU30は、ハイブリッド車両100においてEV走行およびエンジン走行(EHV走行)を選択的に実行させることができる。エンジン走行とは、少なくともエンジン1の動力によってハイブリッド車両100を走行させる走行モードである。EV走行とは、エンジン1の動力によらずにモータジェネレータ3の動力によってハイブリッド車両100を走行させる走行モードである。
ECU30は、車速およびアクセル開度などの条件に基づいて、駆動輪16に伝達するべき要求トルクあるいは要求駆動力を算出し、その算出結果に基づいて、エンジン1、モータジェネレータ3、およびクラッチ5を制御する。エンジン走行においてエンジン1のトルクを駆動輪16に伝達する際には、クラッチ5が係合状態とされる。エンジン走行では、モータジェネレータ3を発電機として機能させ、発生した電力をバッテリ4に充電することができる。また、ECU30は、ハイブリッド車両100の運動エネルギーによってモータジェネレータ3を発電させてバッテリ4を充電する回生制御を実行することができる。回生制御では、モータジェネレータ3は、ハイブリッド車両100に対する制動トルクを発生させることができる。すなわち、ハイブリッド車両100を前方に向けて駆動するトルクを正のトルクとした場合に、回生制御では、モータジェネレータ3はハイブリッド車両100を後方に向けて駆動する負のトルクを発生させる。
エンジン走行では、さらに、モータジェネレータ3を電動機として駆動させ、その動力を駆動輪16に伝達することができる。モータジェネレータ3は、ハイブリッド車両100の加速時等にエンジン1のトルクが不足する場合に、これをアシストすることができる。モータジェネレータ3は電動機として作動する場合、ハイブリッド車両100を前方に向けて駆動する正のトルクを出力する。
また、モータジェネレータ3は、単独でもハイブリッド車両100の走行用の動力源として機能することができる。すなわち、ハイブリッド車両100は、エンジン1の動力によらずにモータジェネレータ3が出力する動力によって走行するEV走行が可能である。EV走行において、モータジェネレータ3は、バッテリ4からの電力を消費して出力する動力によってハイブリッド車両100を走行させる。ECU30は、バッテリ4の充電状態(SOC)や走行状態等に基づいて、エンジン走行あるいはEV走行のいずれの走行モードでハイブリッド車両100を走行させるかを決定する。例えば、軽負荷や低速での走行時にはEV走行が選択され、中高負荷や中高速での走行時には、エンジン走行が選択される。EV走行では、ECU30は、変速機2の入力軸2Aとエンジン1とで動力が伝達されないように、例えばクラッチ5を解放状態に制御する。
また、ECU30は、エンジン走行において、変速機2の変速制御を行うことができる。変速機2の目標ギア段は、運転者の変速操作に応じたギア段であっても、ハイブリッド車両100の走行状態に応じてECU30によって選択されたギア段であってもよい。ECU30は、目標ギア段を実現するように、クラッチ5および変速機2のアクチュエータを制御する。変速機2において変速を行う場合、ECU30は、クラッチ5を解放させ、変速機2において変速前の目標ギア段に対応するギア段を非伝達状態とし、変速後の目標ギア段に対応するギア段を動力伝達状態とする。ECU30は、目標ギア段へのギア段の切替えがなされると、クラッチ5を係合状態とする。
ここで、ECU30が変速機2のギア段の切替えを行う場合や、エンジン走行とEV走行との間で走行モードを移行させる場合など、クラッチ5を制御する場合に、クラッチ5の係合度合いと制御量との関係を精度よく把握できることが好ましい。ここで、係合度合いとは、クラッチ5の完全係合状態や半係合状態、解放状態などのフライホイール51とクラッチディスク52との係合の度合い、言い換えるとフライホイール51とクラッチディスク52とにおける動力の伝達率やクラッチ5のトルク容量等を含むものである。クラッチ5においては、経年変化やクラッチディスク52の摩耗などにより、クラッチ5の係合度合いとアクチュエータ63に供給される制御油圧との関係や、係合度合いとクラッチストロークとの関係が変化することがある。
本実施形態では、ECU30は、クラッチ5のクラッチトルク、すなわちクラッチ5において伝達可能なトルクの大きさと、制御量との対応関係について学習制御を行う。ECU30は、クラッチトルクと制御量との対応関係について未学習や学習が不足しているトルク値が存在する場合、そのトルク値について、クラッチトルクと制御量との対応関係について学習を行う。以下の説明では、クラッチトルクと制御量との対応関係について未学習や学習が不足しているトルク値を単に「学習対象のトルク」と記載する。ECU30は、エンジン走行時に、エンジン1が学習対象のトルクを出力しているときに、学習対象のトルクについてクラッチ5の学習を行う。
ここで、エンジン1の出力トルク(以下、単に「エンジントルク」と記載する。)は、運転者の操作に応じて決定されるものであるため、学習するクラッチトルクに偏りが発生し、広い範囲のマップ補正ができない場合がある。本実施形態では、ECU30は、学習が不足しているトルクがある場合、その学習対象のトルクとするようにエンジントルクを調整して、その学習対象のトルクに対応するクラッチ5の制御量について学習を行う。ここで、学習対象のトルクとするようにエンジントルクを調整するだけでは、駆動輪16に出力されるトルクに変動が生じてしまい、運転者に違和感を与える可能性がある。
ECU30は、学習対象のトルクに調整するためにエンジントルクを増減させた場合、当該増減させたトルクを打ち消すトルクをモータジェネレータ3に出力させて、学習対象のトルクについてクラッチ5の学習を行う。例えば、ハイブリッド車両100に対する運転者の要求トルクに基づくエンジントルク(以下、単に「要求エンジントルク」とも記載する。)に対して学習対象のトルクが大きく、学習制御のためにエンジントルクを学習対象のトルクまで増加させる場合、増加させたトルクを打ち消す負のトルクをモータジェネレータ3に出力させる。これにより、運転者に違和感を与えることを抑制しつつ、広い範囲のクラッチトルクにおいてクラッチ5の学習を行うことが可能となる。
(第一学習制御)
まず、基本となる学習制御について、図5を参照して説明する。図5は、エンジン1の要求エンジントルクが学習対象のトルクとなっているときの学習制御の動作を示すフローチャートである。すなわち、図5に示す制御フローは、運転者の要求に応じて決定されたエンジントルクが学習対象のトルクと一致しているときになされる学習制御の流れを示している。以下、運転者の要求に応じて決定されたエンジントルクが学習対象のトルクと一致しているときになされる学習制御を「第一学習制御」と記載する。第一学習制御では、エンジントルクを増減させることなく学習制御を行うことができる。
図6は、第一学習制御がなされるときのタイムチャートである。図6において、(a)は変速機2のシフトポジション、(b)はアクセル開度、(c)は各トルク、(d)は各回転数、(e)はMGトルクを示す。(c)には、エンジントルク(実線)およびクラッチトルク(破線)が示されている。クラッチトルクは、現在マップ値に基づく推定値である。ECU30は、クラッチトルクとクラッチ5の制御量との対応関係を示すクラッチトルクマップを記憶しており、クラッチトルクマップに基づいてクラッチ5を制御する。また、ECU30は、学習制御の結果に基づいてクラッチトルクマップを更新する。これにより、学習結果を反映させてクラッチ5の制御を補正し、クラッチ5の制御精度を向上させることができる。
また、ECU30は、クラッチ特性学習回数のマップを有している。クラッチ特性学習回数のマップには、各クラッチトルク値(マップ点)について、学習回数や学習間隔、過去に学習を行った時期などが記憶されている。ECU30は、このクラッチ特性学習回数のマップに基づいて、学習が不足しているマップ点や一定期間クラッチ特性の学習を行っていないマップ点を取得することができる。
(d)には、エンジン回転数(破線)および入力軸回転数(実線)が示されている。(e)のMGトルクは、モータジェネレータ3の出力トルクである。図6には、シフトポジションおよびアクセル開度が一定で推移する定常走行中に第一学習制御が実行されたときのタイムチャートが示されている。
図5に示す制御フローは、例えば、以下の(1)、(2)の条件が満たされる場合に実行される。
(1)エンジン走行中のエンジントルクが、クラッチ特性学習回数のマップにおいて学習が不足しているトルクや、一定期間クラッチ特性学習を行っていないトルクである。
(2)アクセル開度の変化量が一定以内である状態が所定時間以上継続している。
まず、ステップS11では、ECU30は、クラッチトルクを緩やかに減少させる。ECU30は、クラッチ5における動力の伝達を切断する側にクラッチストロークを徐々に変化させる。つまり、ECU30は、クラッチ5の係合力を減少させる。ECU30は、油圧回路70からクラッチ5のアクチュエータ63に供給する制御油圧とクラッチトルクとの対応関係を示すクラッチトルクマップを記憶している。ECU30は、クラッチトルクマップに基づいて、クラッチトルクをエンジントルクよりも小さなトルクとするように、クラッチトルクを減少させていく。このときに、ECU30は、トルク変動によって運転者にショックを感じさせない範囲で、クラッチトルクを変化させる。例えば、運転者にショックを感じさせない範囲でかつ最大の変化率でクラッチトルクを変化させるようにしてもよい。また、クラッチトルクの変化率(傾き)は、一定とされることが好ましい。クラッチトルクの変化率は、例えば、実験の結果に基づいて定められた適合値である。図6では、時刻t11においてクラッチトルクが減少を開始する。
更に、ECU30は、クラッチトルクがエンジントルクに対して不足すると、モータジェネレータ3にアシストトルクを出力させる。このときのモータジェネレータ3が出力するアシストトルクは、例えば、エンジントルクからクラッチトルクを減じたもの、すなわち上記不足するトルクとされる。なお、アシストトルクを算出するときのクラッチトルクは、例えば、クラッチトルクマップに基づいて算出される推定クラッチトルクとすることができる。ステップS11が実行されると、ステップS12に進む。
ステップS12では、ECU30により、エンジン回転数が所定以上上昇したか否かが判定される。クラッチトルクがエンジントルクよりも小さくなると、下記式(1)に示すエンジン回転加速度でエンジン回転数が上昇する。
エンジン回転加速度=(エンジントルク−クラッチトルク)/エンジンイナーシャ
…(1)
ECU30は、エンジン回転数が入力軸回転数に対して所定回転数以上上昇すると、ステップS12で肯定判定を行う。所定回転数は、運転者に違和感を与えない範囲で定められている。図6では、時刻t12においてクラッチトルクがエンジントルクを下回り、エンジン回転数が上昇し始める。時刻t13において、エンジン回転数が入力軸回転数を所定回転数上回り、ステップS12で肯定判定がなされる。ステップS12の判定の結果、エンジン回転数が所定以上上昇したと判定された場合(ステップS12−Y)にはステップS13に進み、そうでない場合(ステップS12−N)にはステップS11に移行する。
ステップS13では、ECU30は、クラッチトルクを増加させる。ECU30は、クラッチ5における動力の伝達度合いを増加させる側にクラッチストロークを徐々に変化させる。つまり、ECU30は、クラッチ5の係合力を増加させる。ECU30は、油圧回路70からクラッチ5のアクチュエータ63に供給する制御油圧を減少させていく。このときに、ECU30は、トルク変動によって運転者にショックを感じさせない範囲でクラッチトルクを変化させる。例えば、運転者にショックを感じさせない範囲でかつ最大の変化率でクラッチトルクを変化させるようにしてもよい。クラッチトルクの変化率(傾き)は、一定とされることが好ましい。クラッチトルクの変化率は、例えば、実験の結果に基づいて定められた適合値である。図6では、時刻t13からクラッチトルクが増加し始める。ECU30は、クラッチトルクの増加に応じてモータジェネレータ3のアシストトルクを減少させる。ステップS13が実行されると、ステップS14に進む。
ステップS14では、ECU30により、エンジン回転加速度が一定範囲内の値であるか否かが判定される。ステップS14では、エンジントルクとクラッチトルクとが一致したか否かが判定される。クラッチトルクが増加してエンジントルクに近づいていく場合、上記式(1)からわかるように、エンジントルクとクラッチトルクとが一致すると、エンジン回転加速度は0となる。ECU30は、エンジン回転数センサによって検出されたエンジン回転数に基づいてエンジン回転加速度を算出する。算出されたエンジン回転加速度が、0を含む予め定められた一定範囲内の値である場合に、ステップS14で肯定判定を行う。ステップS14の判定の結果、エンジン回転加速度が一定範囲内の値であると判定された場合(ステップS14−Y)にはステップS15に進み、そうでない場合(ステップS14−N)にはステップS13に移行する。
ステップS15では、ECU30は、現在のエンジントルクをクラッチトルクマップに反映させる。ステップS14において肯定判定がなされたタイミングでは、クラッチトルクは、エンジントルクと一致している。また、このタイミングでは、クラッチ5が伝達するトルクは、エンジントルクと一致している。つまり、エンジン回転加速度に基づいてクラッチ5が実際に伝達するトルクを検出することができる。ECU30は、このタイミングで取得したエンジントルクをクラッチトルクとしてクラッチ5の学習を行う。
ECU30は、クラッチトルクと制御量との対応関係を示すクラッチトルクマップにおいて、現在のエンジントルクをクラッチトルクとして、このクラッチトルクに対応する制御量を現在の制御量で置き換える。言い換えると、学習対象のトルクにおけるクラッチ5の制御量について学習を行う。なお、クラッチトルクマップの値を現在の制御量に直接置き換えることに代えて、なましをかけた値で制御量を更新するようにしてもよい。一例として、更新前のクラッチトルクマップの制御量の値と現在の制御量との平均値を新しい制御量の値として更新してもよい。また、学習対象のトルクの近傍のマップ点に対して補間処理を行ってもよい。例えば、学習対象のトルクと、既に学習が完了したトルクとの間に未学習や学習不足のトルクが存在する場合に、その未学習や学習不足のトルクに対応する制御量を補間することができる。なお、クラッチトルクマップにおいてクラッチトルクに対応する制御量を更新することに代えて、制御量に対応するクラッチトルクの値を更新するようにしてもよい。ステップS15が実行されると、ステップS16に進む。
ステップS16では、ECU30は、クラッチトルクを増加させる。ECU30は、学習が完了すると、クラッチ5が完全に係合するまでクラッチトルクを増加させる。クラッチトルクの増加に応じて、時刻t14から時刻t15にかけてエンジン回転数は低下する。ステップS16が実行されると、ステップS17に進む。
ステップS17では、ECU30により、エンジン回転数と入力軸回転数との差が一定範囲内であるか否かが判定される。ステップS17では、クラッチ5が完全に係合したか否かが判定される。ECU30は、(エンジン回転数−入力軸回転数)が、0を含む一定範囲内の値である場合にステップS17で肯定判定する。図6では、時刻t15においてエンジン回転数が入力軸回転数に一致する。ステップS17の判定の結果、エンジン回転数と入力軸回転数との差が一定範囲内であると判定された場合(ステップS17−Y)には本制御フローは終了し、そうでない場合(ステップS17−N)にはステップS16に移行する。
図5に示す第一学習制御によれば、学習制御においてクラッチトルクがエンジントルクを下回るときは、モータジェネレータ3によって下回る分のトルクがアシストされる。これにより、トルク変動によって運転者に違和感を与えることが抑制される。
(第二学習制御)
次に、第二学習制御について説明する。第二学習制御は、学習を必要とする学習対象のトルクにエンジントルクを調整してからクラッチ5の学習を行う学習制御である。第二学習制御は、例えば、クラッチトルクマップにおいて、運転者の要求に基づくエンジントルクに対応するマップ点の近傍に、未学習や学習不足のマップ点、あるいは一定期間クラッチ特性学習を行っていないマップ点が存在する場合に実行される。つまり、第二学習制御は、学習を必要とする学習対象のトルクと、運転者の要求トルク(以下、「ユーザ要求トルク」とも記載する。)に応じたエンジントルクとが異なる場合に実行されるものであり、例えば、学習対象のトルクが、ユーザ要求トルクの近傍のトルクである場合に実行される。
図1を参照して、第二学習制御の動作について説明する。図4は、第二学習制御がなされるときのタイムチャートである。ECU30は、クラッチ特性学習回数のマップに基づいて、学習が不足しているトルク近傍のエンジントルクで走行している場合、または、一定期間クラッチ特性学習を行っていないトルクの近傍のエンジントルクで走行している場合に図1の制御フローを開始する。
まず、ステップS1では、ECU30により、学習したいトルクとエンジントルクとが一致しているか否かが判定される。ECU30は、学習対象のトルクと現在のエンジントルクとに基づいてステップS1の判定を行う。ステップS1の判定の結果、学習したいトルクとエンジントルクとが一致すると判定された場合(ステップS1−Y)にはステップS3に進み、そうでない場合(ステップS1−N)にはステップS2に進む。
ステップS2では、ECU30は、MGトルクとエンジントルクを調整する。ECU30は、車両トルク、すなわち駆動輪16に出力されるトルクを変更せずに、モータジェネレータ3を用いてエンジントルクを調整する。具体的には、ECU30は、エンジントルクを学習対象のトルクに一致させるようにエンジントルクを調整し、かつ、エンジントルクとモータジェネレータ3の出力トルク(MGトルク)との合成トルクを変動させないようにMGトルクを調整する。
例えば、学習対象のトルクが運転者の要求に基づくエンジントルクよりも小さい場合、ECU30は、エンジントルクを学習対象のトルクに一致させるようにエンジントルクを減少させると共に、当該減少させたトルクを打ち消す正のトルクをモータジェネレータ3に出力させる。このときに、エンジントルクの減少分とMGトルクの増加分とは大きさが等しいことが好ましいが、運転者に違和感を与えない範囲でMGトルクの増加量を抑制するようにしてもよい。このように、ECU30は、エンジントルクを学習対象のトルクまで減少させ、かつ当該減少させた分のトルクを打ち消すトルクをモータジェネレータ3に出力させる。図4では、ECU30が時刻t1から時刻t2にかけて、エンジントルクを減少させ、これに対応してMGトルクを増加させている。
一方、学習対象のトルクが運転者の要求に基づくエンジントルクよりも大きい場合、ECU30は、エンジントルクを学習対象のトルクまで増加させ、かつ当該増加させた分のトルクを打ち消す負のトルクをモータジェネレータ3に出力させる。ステップS2が実行されると、ステップS1に移行する。
ステップS3では、ECU30は、クラッチトルクを緩やかに減少させる。ECU30は、例えば、ステップS11と同様にしてクラッチトルクを減少させることができる。また、ECU30は、クラッチトルクがエンジントルクよりも小さくなると、モータジェネレータ3にアシストトルクを出力させる。アシストトルクは、例えば、エンジントルクから推定クラッチトルクを減じたものとされる。図4では、時刻t3においてクラッチトルクがエンジントルクを下回り、MGトルクによるアシストが開始される。ステップS3が実行されると、ステップS4に進む。
ステップS4では、ECU30により、エンジン回転数が所定以上上昇したか否かが判定される。ECU30は、例えば、エンジン回転数が入力軸回転数に対して所定回転数以上上昇すると、ステップS4で肯定判定を行う。図4では、時刻t4においてエンジン回転数が入力軸回転数を所定回転数上回る。ステップS4の判定の結果、エンジン回転数が所定以上上昇したと判定された場合(ステップS4−Y)にはステップS5に進み、そうでない場合(ステップS4−N)にはステップS3に移行する。
ステップS5からステップS9は、図5のステップS13からステップS17と同様とすることができる。すなわち、ECU30は、ステップS5でクラッチトルクを増加させると、ステップS6でエンジン回転加速度が一定範囲内であるかを判定する。エンジン回転加速度が一定範囲内であれば(ステップS6−Y)、ステップS7で現在のエンジントルクをクラッチトルクマップに反映させて、ステップS8でクラッチトルクを増加させてからステップS9に進む。ステップS9でエンジン回転数と入力軸回転数との差が一定範囲内であると判定される(ステップS9−Y)と、本制御フローは終了する。図4では、クラッチトルクの増加に応じて、時刻t5から時刻t6にかけてエンジン回転数が低下し、時刻t6においてエンジン回転数が入力軸回転数に一致する。
ECU30は、本制御フローが終了すると、第二学習制御においてステップS2で増減させたMGトルクをエンジントルクに架け替える。ECU30は、エンジントルクを学習対象のトルクに一致させるときにMGトルクを増加させていた場合には、その増加分のトルクだけMGトルクを減少させると共に、MGトルクの減少に応じてエンジントルクを増加させる。一方、エンジントルクを学習対象のトルクに一致させるときにMGトルクを減少させていた場合には、その減少分のトルクだけMGトルクを増加させると共に、MGトルクの増加に応じてエンジントルクを減少させる。つまり、ECU30は、第二学習制御が終了すると、駆動輪16に出力されるトルクを変更せずにエンジン1とモータジェネレータ3とのトルク配分を第二学習制御の開始前の配分に戻す。
第二学習制御によれば、ユーザー操作によって学習可能なトルクの領域に偏りが生じることを抑制することができる。これにより、クラッチ5における制御の精度を向上させることができる。また、ECU30は、学習対象のトルクにエンジントルクを一致させるときに、エンジントルクの増減による車両トルクの変化を打ち消すようにモータジェネレータ3にトルクを出力させる。これにより、運転者に違和感を与えることが抑制される。
なお、第二学習制御を行うときに、現在のエンジントルクの近傍に複数の学習不足のマップ点が存在する場合、いずれのマップ点に関して学習を行うかを選択する必要がある。ECU30は、例えば、学習不足の度合いが高いマップ点を優先してクラッチトルクについての学習制御を行うようにしてもよい。また、バッテリ4の充電状態SOCに基づいて、学習を行うマップ点が決定されてもよい。例えば、バッテリ4の充電状態SOCが不足している場合には、第二学習制御においてモータジェネレータ3による回生制御を行うことができるように、現在のエンジントルクよりも高トルク側のマップ点を優先して学習するようにしてもよい。
(加減速中の学習制御)
上記第一学習制御や第二学習制御は、ハイブリッド車両100の加速中や減速中であっても実行可能である。ここでは、加速中における第一学習制御について説明する。図7は、加速中に第一学習制御がなされるときのタイムチャートである。加速中であるため、エンジン回転数および入力軸回転数は増加傾向にある。
時刻t21においてクラッチトルクの減少が開始され、時刻t22においてクラッチトルクがエンジントルクを下回り始める。時刻t23では、エンジン回転数が入力軸回転数に対して所定以上に上昇したことが検出され、クラッチトルクの増加が開始される。時刻t24において、エンジン回転加速度が一定範囲内となり、クラッチトルクがエンジントルクに一致したと判定される。なお、ハイブリッド車両100の加減速時には、エンジン回転加速度と入力軸回転加速度との差分が一定範囲内となった場合に、クラッチトルクがエンジントルクに一致したと判定されてもよい。クラッチトルクがエンジントルクに一致すると、そのときのエンジントルクをクラッチトルクとしてクラッチトルクマップの更新が行われる。クラッチトルクマップの更新が完了すると、ECU30はクラッチ5が完全に係合するまでクラッチトルクを増加させる。時刻t25においてクラッチ5が完全係合して第一学習制御が終了する。
減速中についても、加速中と同様にして、エンジン回転加速度に基づいてクラッチトルクがエンジントルクに一致したことを検出可能である。第二学習制御についても第一学習制御と同様にして加減速中にクラッチトルクがエンジントルクに一致する点を検出可能である。
(学習中にユーザ要求が変更されたときの学習制御)
上記第一学習制御や第二学習制御は、学習中に運転者の要求が変更された場合であっても対応可能である。エンジントルクに基づいてクラッチトルクについての学習を行う場合、学習制御の途中で運転者の要求が変更されたときに、エンジントルクが変更されてしまうと誤学習がなされる可能性がある。ECU30は、学習中にユーザ要求トルクが変化すると、ユーザ要求トルクの変化に応じてモータジェネレータ3の出力トルクを変化させる。ECU30は、例えば、ユーザ要求トルクの変化分をモータジェネレータ3に出力させる。これにより、運転者の要求に応えた車両走行トルクの実現と、学習精度の向上とを両立させることができる。ここでは、学習途中におけるユーザ要求トルクの変更に対応可能とした第一学習制御の変形例について説明する。図8は、第一学習制御の変形例の動作を示すフローチャートである。図9は、第一学習制御の変形例がなされるときのタイムチャートである。
まず、ステップS21では、ECU30は、クラッチトルクを緩やかに減少させる。ECU30は、例えば、ステップS11と同様にしてクラッチトルクを減少させることができる。また、ECU30は、クラッチトルクがエンジントルクよりも小さくなると、モータジェネレータ3にアシストトルクを出力させる。アシストトルクは、例えば、エンジントルクから推定クラッチトルクを減じたものとされる。図9では、時刻t31においてクラッチトルクが減少し始め、時刻t32においてクラッチトルクがエンジントルクを下回り、MGトルクが増加を始める。ステップS21が実行されると、ステップS22に進む。
ステップS22では、ECU30により、ユーザ要求トルクから現在車両トルクを減じたものが一定範囲内の値であるか否かが判定される。ステップS22では、車速およびアクセル開度などの条件に基づいて算出されるユーザ要求トルクと、現在駆動輪16に出力されているトルクである車両トルクとに乖離が生じていないか否かが判定される。ECU30は、(ユーザ要求トルク−現在車両トルク)が0を含む一定範囲内の値であるときにステップS22で肯定判定を行う。この一定範囲は、例えば、運転者に違和感を与えないトルクの乖離の範囲として定められる。ステップS22の判定の結果、ユーザ要求トルクから現在車両トルクを減じたものが一定範囲内の値であると判定された場合(ステップS22−Y)にはステップS24に進み、そうでない場合(ステップS22−N)にはステップS23に進む。
ステップS23では、ECU30により、MGトルクが調整される。ECU30は、ユーザ要求トルクに対して現在車両トルクが不足している場合、不足分のトルクをモータジェネレータ3にアシストさせる。すなわち、エンジントルクを変動させることなくユーザ要求トルクを実現できるように、モータジェネレータ3の出力トルクを増加させる。一方、ユーザ要求トルクに対して現在車両トルクが上回る場合、ECU30は、過剰となっている分だけMGトルクを減少させる。すなわち、エンジントルクを変動させることなくユーザ要求トルクを実現できるように、モータジェネレータ3の出力トルクを減少させる。ステップS23が実行されると、ステップS22に移行する。
ステップS24では、ECU30により、エンジン回転数が所定以上上昇したか否かが判定される。ECU30は、例えば、ステップS12と同様にしてステップS24の判定を行うことができる。図9では、時刻t33においてエンジン回転数が所定以上上昇したと判定される。ステップS24の判定の結果、エンジン回転数が所定以上上昇したと判定された場合(ステップS24−Y)にはステップS25に進み、そうでない場合(ステップS24−N)にはステップS21に移行する。
ステップS25では、ECU30は、クラッチトルクを増加させる。ECU30は、例えば、ステップS13と同様にして徐々にクラッチトルクを増加させる。ステップS25が実行されるとステップS26に進む。
ステップS26では、ECU30により、ユーザ要求トルクから現在車両トルクを減じたものが一定範囲内の値であるか否かが判定される。図9では、時刻t33においてユーザ要求トルクが増加を始め、ステップS26で否定判定されるようになる。ステップS26の判定の結果、ユーザ要求トルクから現在車両トルクを減じたものが一定範囲内の値であると判定された場合(ステップS26−Y)にはステップS28に進み、そうでない場合(ステップS26−N)にはステップS27に進む。
ステップS27では、ECU30により、MGトルクが調整される。ECU30は、例えば、ステップS23と同様にして、ユーザ要求トルクに対して過不足する分の車両トルクをモータジェネレータ3に出力させる。図9では、時刻t33にユーザ要求トルクが増加し始めたことに対応してモータジェネレータ3がアシストトルクを出力することで、クラッチトルクを増加させ始めた時刻t33以降もMGトルクが上昇している。ステップS27が実行されると、ステップS26に移行する。
ステップS28では、ECU30により、エンジン回転加速度が一定範囲内の値であるか否かが判定される。ECU30は、例えば、ステップS14と同様にしてステップS28の判定を行うことができる。図9では、時刻t34においてエンジン回転加速度が一定範囲内の値であると判定される。ステップS28の判定の結果、エンジン回転加速度が一定範囲内の値であると判定された場合(ステップS28−Y)にはステップS29に進み、そうでない場合(ステップS28−N)にはステップS25に移行する。
ステップS29では、ECU30は、現在のエンジントルクをクラッチトルクマップに反映させる。ECU30は、例えば、ステップS15と同様にしてクラッチトルクマップを更新する。ステップS29が実行されると、ステップS30に進む。
ステップS30では、ECU30は、クラッチトルクを増加させる。ECU30は、クラッチ5が完全に係合するまでクラッチトルクを増加させる。ステップS30が実行されると、ステップS31に進む。
ステップS31では、ECU30により、エンジン回転数と入力軸回転数との差が一定範囲内であるか否かが判定される。図9では、時刻t35においてエンジン回転数が入力軸回転数に一致する。ステップS31の判定の結果、エンジン回転数と入力軸回転数との差が一定範囲内であると判定された場合(ステップS31−Y)には本制御フローは終了し、そうでない場合(ステップS31−N)にはステップS30に移行する。
ECU30は、第一学習制御の変形例が終了すると、学習中に増減させたMGトルクをエンジントルクに架け替える。ECU30は、学習制御の途中のユーザ要求トルクの増加に応じてMGトルクを増加させていた場合には、その増加分のトルクだけMGトルクを減少させると共に、MGトルクの減少に応じてエンジントルクを増加させる。一方、学習制御の途中のユーザ要求トルクの減少に応じてMGトルクを減少させていた場合には、その減少分のトルクだけMGトルクを増加させると共に、MGトルクの増加に応じてエンジントルクを減少させる。つまり、ECU30は、変形例の第一学習制御が終了すると、エンジントルクを通常の要求エンジントルクに戻すように、ユーザ要求トルクを実現するためのMGトルクとエンジントルクとの配分を調整する。図9では、ECU30は、時刻t35以降にMGトルクを減少させ、かつエンジントルクを増加させている。なお、学習後のユーザ要求トルクの変化をMGトルクによって調整するようにしてもよい。
第二学習制御についても、第一学習制御の変形例と同様にして、学習制御の途中に生じたユーザ要求トルクの変動に対してMGトルクによって調整する変形例を実行することができる。
以上説明したように、本実施形態の車両制御装置1−1は、ハイブリッド車両100の走行中にクラッチトルクを増減させてクラッチトルクの特性補正を行う。このため、運転者が通常使用する幅広い範囲のクラッチトルクについて学習が可能となる。また、学習制御の際にモータジェネレータ3の出力トルクを調整することで車両トルクがユーザ要求トルクから乖離することが抑制される。これにより、運転者に違和感を与えることなくクラッチ5について学習を行うことができる。
なお、上記第一学習制御および第二学習制御を選択的に実行するようにしてもよい。例えば、クラッチトルクマップにおいて、現在のユーザ要求トルクに応じたエンジントルク(要求エンジントルク)と、その近傍のトルク(例えば、近傍の複数のトルク)がいずれも学習不足である場合、エンジントルクを調整せずに要求エンジントルクについて第一学習制御を行うことも、エンジントルクを調整して近傍のトルクについて第二学習制御を行うことも可能である。このような場合に、以下のような優先順位の決め方が可能である。
(1)第一学習制御を優先して実行し、その後に第二学習制御を行う。第一学習制御は、エンジントルクを変更することなく即座にクラッチトルクの学習を開始できる。このため、第一学習制御を優先するようにすれば、多くの学習機会を確保することができる。
(2)過去の運転操作の履歴等に基づいて、優先して学習するトルクを決定する。例えば、過去の運転履歴において、要求される頻度が相対的に高いエンジントルクと、要求される頻度が相対的に低いエンジントルクとがあり、それらが共に学習対象のトルク候補である場合、要求される頻度が低いエンジントルクについてのクラッチ5の学習を優先することができる。このようにすれば、学習するトルクの偏りを抑制する効果を高めることができる。
(3)学習が不足している度合いに基づいて、優先して学習するトルクを決定する。例えば、学習回数が少ないトルクや、学習してからの経過期間が長いトルクを優先して学習することができる。このようにすれば、学習するトルクの偏りを抑制することができる。
(4)燃費に基づいて、優先して学習するトルクを決定する。例えば、学習対象のトルク候補のそれぞれについて学習制御を行うときの燃費の変化を見積もり、学習が不足している度合いや、要求される頻度において同程度の学習対象のトルク候補が複数ある場合に、燃費を向上させる、あるいは燃費の低下の度合いが小さいトルクを優先して学習対象のトルクとするようにしてもよい。
なお、本実施形態では学習制御においてクラッチ5のクラッチトルクと制御量との対応関係が学習されたが、学習制御における学習内容はこれには限定されない。クラッチ5についての他の学習が行われてもよい。
本実施形態では、第一動力源がエンジン1であり、第二動力源がモータジェネレータ3であったが、第一動力源および第二動力源は、これらには限定されず、それぞれ他の公知の動力源であってもよい。
本実施形態では、モータジェネレータ3が変速機2の出力軸2Bに接続されているが、モータジェネレータ3の位置はこれには限定されない。モータジェネレータ3は、学習制御を実行するときにクラッチ5を介さずに駆動輪16と接続されることができるものであればよい。例えば、モータジェネレータ3は、入力軸2Aあるいは出力軸2Bのいずれかに選択的に接続可能なものであってもよい。この場合、クラッチ5についての学習制御を行うときに、モータジェネレータ3が出力軸2Bに対して接続されるようにしてもよい。また、モータジェネレータ3は、変速機2と動力の伝達を行わないニュートラル状態に切替え可能なものであってもよい。
クラッチ5の構成は、図示したものには限定されない。例えば、クラッチ5は、湿式のクラッチであってもよく、また多板式のクラッチであってもよい。また、アクチュエータ63は、油圧式に限らず、他の公知のアクチュエータが用いられてもよい。変速機2は、図示したものには限定されない。他の公知の変速機構が用いられてもよい。
上記の実施形態に開示された内容は、適宜組み合わせて実行することができる。