JP2012188020A - ケーブルの配置構造、及びこの配置構造を有する移動体電子システム - Google Patents
ケーブルの配置構造、及びこの配置構造を有する移動体電子システム Download PDFInfo
- Publication number
- JP2012188020A JP2012188020A JP2011053372A JP2011053372A JP2012188020A JP 2012188020 A JP2012188020 A JP 2012188020A JP 2011053372 A JP2011053372 A JP 2011053372A JP 2011053372 A JP2011053372 A JP 2011053372A JP 2012188020 A JP2012188020 A JP 2012188020A
- Authority
- JP
- Japan
- Prior art keywords
- noise
- signal
- sensor
- cable
- main line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Noise Elimination (AREA)
Abstract
【課題】複雑な電磁環境であっても、二つの電子装置間での通信におけるノイズの影響を軽減することができるケーブルの配置構造、及びこの配置構造を有する移動体電子システムを提供すること。
【解決手段】車両に搭載され、ECU10とセンサ20とを電気的に接続するケーブルの配置構造であって、このケーブルとして、少なくとも一方の前記電子装置から他方の前記電子装置に対する同一の信号が送信される本線30と補助線40を含み、同一の信号が送信される本線30と補助線40は、車両におけるグランド電位部51との距離が互いに異なる位置に配置される。
【選択図】図1
【解決手段】車両に搭載され、ECU10とセンサ20とを電気的に接続するケーブルの配置構造であって、このケーブルとして、少なくとも一方の前記電子装置から他方の前記電子装置に対する同一の信号が送信される本線30と補助線40を含み、同一の信号が送信される本線30と補助線40は、車両におけるグランド電位部51との距離が互いに異なる位置に配置される。
【選択図】図1
Description
本発明は、移動体に搭載され、二つの電子装置を電気的に接続するケーブルの配置構造、及びこの配置構造を有する移動体電子システムに関するものである。
従来、特許文献1に開示された電子制御装置があった。この電子制御装置は、アナログ信号入力回路部を備える。そして、アナログ信号入力回路部は、電子制御装置の外部に設けられたアナログセンサと、電源線および信号線を介して電気的に接続されている。
また、アナログ信号入力回路部は、電流制限回路部と、積分回路部と、限流抵抗と、信号ノイズ吸収回路と、第1のバイパスコンデンサとを有している。そして、第1のバイパスコンデンサの静電容量C1と寄生インダクタンスL1とは、7×106<1/[2π√(L1×C1)]<35×106の範囲に設定されている。
特許文献1に開示されている電子制御装置によれば、近接使用される携帯無線機器の強力な送信電波によってケーブル(電源線あるいは信号線)に誘起される周波数帯域(7MHz〜35MHz)のノイズを、バイパスコンデンサを経由してグランドラインに逃がすことができる。また、ケーブルに発生するその他のノイズは、アナログ信号入力回路部における信号ノイズ吸収回路と積分回路部を介して除去することができる。よって、耐ノイズ性に優れた電子制御装置を得ることができる。
しかしながら、特許文献1に開示された電子制御装置においては、ケーブルに重畳したノイズを除去するためにバイパスコンデンサ、信号ノイズ吸収回路、積分回路部などの回路を設ける必要がある。
また、このバイパスコンデンサによって対策できるノイズの周波数は、バイパスコンデンサの特性により決定される。従って、対策したいノイズの周波数が既知の場合は、バイパスコンデンサの特性を調整することでノイズ対策が可能となる。
ところが、複雑な電磁環境化においては、対策したいノイズの周波数が広範囲となるばかりか、突発的なノイズ(周波数が既知でないノイズ)が発生することもありうる。よって、複雑な電磁環境化では、対策したいノイズ(周波数)の分だけバイパスコンデンサを増加しなければならず、コストがかかる。さらに、バイパスコンデンサを増加したとしても、突発的なノイズ(周波数が既知でないノイズ)に対しては効果が期待できない場合もある。
本発明は、上記問題点に鑑みなされたものであり、複雑な電磁環境であっても、二つの電子装置間での通信におけるノイズの影響を軽減することができるケーブルの配置構造、及びこの配置構造を有する移動体電子システムを提供することを目的とする。
移動体は、自身が移動することによって電磁環境が変化するため、電磁環境が複雑になりやすい。つまり、移動体に搭載された電子装置の搭載環境に関しても、電磁環境が複雑になりやすい。よって、移動体に搭載された電子装置間で通信される信号には、周波数が特定しにくい(すなわち、既知でない周波数の)ノイズが重畳しやすくなる。
そこで、上記目的を達成するために請求項1に記載のケーブルの配置構造は、移動体に搭載され、二つの電子装置を電気的に接続するケーブルとして、少なくとも一方の電子装置から他方の電子装置に対する同一の信号が送信される複数本のケーブルを含むものである。そして、この同一の信号が送信される複数のケーブルをグランド電位部との距離が互いに異なる位置に配置することで、各ケーブルのインピーダンスを異ならせることができる。よって、各ケーブルに流れている信号に対して、同じ周波数のノイズが同時に重畳する確率を低下させることができる。
つまり、複数のケーブルのいずれかに流れている信号にノイズが重畳したとしても、このノイズと同じ周波数のノイズが他のケーブルに流れている信号に重畳することを抑制することができる。換言すると、二つの電子装置間において、ノイズが重畳していない少なくとも一つの信号を通信しやすくなる。従って、請求項1に係るケーブルの配置構造においては、複雑な電磁環境であっても、二つの電子装置間の通信におけるノイズの影響を軽減することができる。
また、ケーブルに流れる信号に重畳するノイズの周波数は、ケーブルの周波数特性に大きく影響される。また、このケーブルの周波数特性は、ケーブルの長さによって変化するものである。
そこで、請求項2に示すように、同一の信号が送信され、グランド電位部との距離が互いに異なる位置に配置された複数のケーブルは、互いに異なる長さを有するようにすることによって、互いの周波数特性が異ならせることができる。つまり、ケーブル毎に重畳しやすいノイズ(周波数)が異なる。従って、二つの電子装置間においてノイズの影響をより一層軽減することができる。
また、上記目的を達成するために請求項3に記載の移動体電子システムは、上記請求項1に記載のケーブルの配置構造を有するものである。つまり、各ケーブルに流れている同一の信号に対して、同じ周波数のノイズが同時に重畳する確率を低下させることができる。よって、複数のケーブルのいずれかに流れている信号にノイズが重畳したとしても、このノイズと同じ周波数のノイズが他のケーブルに流れている信号に重畳することを抑制することができる。換言すると、二つの電子装置間において、ノイズが重畳していない少なくとも一つの信号を通信しやすくなる。
そして、電子装置は、各ケーブルを介して受信した複数の信号におけるノイズ量に基づいて、受信信号として採用する一つの信号を選択することで、ノイズが重畳していない信号を採用しやすくなる。従って、請求項3に係る移動体電子システムにおいては、複雑な電磁環境であっても、二つの電子装置間の通信におけるノイズの影響を軽減することができる。
また、この選択手段としては、請求項4に示すように、ノイズ量と閾値とを比較して、閾値より小さいと判定した信号を選択することによって、閾値よりも小さい信号を受信信号として採用することができる。
また、このようにノイズ量と閾値とを比較して受信信号を採用する場合、請求項5に示すように、最初に受信した信号のノイズ量を算出し、選択手段にて最初に受信した信号のノイズ量が閾値を超えていると判定された場合に、次に受信した信号のノイズ量を算出するようにしてもよい。このようにすることによって、先に受信した信号のノイズ量が閾値よりも小さい場合、受信した全ての信号に対してノイズ量を算出する必要がなく、処理を簡素化できるので好ましい。
しかしながら、各ケーブルを介して受信した複数の信号のノイズ量が全て閾値を超えていることもありうる。このように全て閾値を超えていた場合は、請求項6に示すように、受信した複数の信号のノイズ量を比較して、ノイズ量が最も小さい信号を選択することによって、少なくとも一つの信号(ノイズ量が閾値を超えている複数の信号の中で最もノイズ量が小さい信号)を受信信号として採用することができる。
また、選択手段としては、請求項7に示すように、各ケーブルを介して受信した複数の信号のノイズ量を比較して、ノイズ量が最も小さい信号を選択することによって、閾値などを用いることなく受信信号としての信号を選択することができる。
なお、請求項8に係る発明の作用、効果に関しては、上述の請求項2に係る発明と同様であるため説明は省略する。
以下、本発明の実施の形態を図に基づいて説明する。
本実施の形態においては、一例として、本発明の移動体電子システム及びケーブルの配置構造を車両(4輪自動車)に適用した例を採用する。
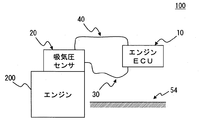
図1に示すように、本実施の形態における車両電子システム(移動体電子システム)100は、ECU(electronic control unit;電子制御装置)10と、センサ(電子装置)20と、ECU(電子装置)10とセンサ20とを電気的に接続する本線(ケーブル)30及び補助線(ケーブル)40とを備える。
ECU10は、本発明の電子装置に相当するものである。このECU10は、例えば、CPU、ROM、RAM、バックアップRAM等(いずれも図示せず)よりなるマイクロコンピュータを主体として構成され、ROMに記憶された各種の制御プログラムを実行することで各種の処理を実行するものである。また、ECU10は、本線30及び補助線40を介してセンサ20と通信を行う。つまり、ECU10は、本線30及び補助線40を介して、センサ20による検出結果であるセンサ信号(信号)を受信(取得)する。つまり、ECU10は、本線30及び補助線40毎(ケーブル毎)に、センサ信号を受信(取得)する。なお、ここでは詳しい説明は省略するが、ECU10は、このセンサ信号に応じて所定の処理を実行するものである。
センサ20は、本発明の電子装置に相当するものである。このセンサ20は、検出動作を実行して、その検出結果であるセンサ信号を本線30及び補助線40を介してECU10に送信する。なお、センサ20は、ECU10に対してセンサ信号を送信する際には、本線30及び補助線40に同一のセンサ信号を送信(出力)する。よって、外来ノイズ(高周波ノイズ)が影響しない場合、本線30及び補助線40には、ECU10とセンサ20との間で通信される同一のセンサ信号が流れることになる。しかしながら、外来ノイズ(高周波ノイズ)が影響してセンサ信号に外来ノイズが重畳した場合は、センサ20が本線30及び補助線40に同一のセンサ信号を送信(出力)したとしても、本線30及び補助線40には異なる信号が流れることがある。
本線30及び補助線40は、本発明のケーブルに相当するものである。この本線30及び補助線40としては、例えば、ワイヤーハーネス(換言するとケーブルハーネス)を採用することができる。つまり、電源線、グランド線、信号線などの複数の電線を束にして、絶縁体で被覆したケーブルを採用することができる。以下、本線30及び補助線40を単にワイヤーハーネスとも称する。
上述のように、本線30及び補助線40には、センサ20からECU10に対する同一のセンサ信号が送信(出力)される。従って、ECU10とセンサ20とを電気的に接続するワイヤーハーネスである本線30とは別に、本線30と同一のセンサ信号がセンサ20から送信されるものであり、ECU10とセンサ20とを電気的に接続するワイヤーハーネスである補助線40が設けられる。
この本線30及び補助線40は、車両におけるグランド電位部(例えば、車両のボデー)との距離が互いに異なる位置に配置される。好ましくは、本線30及び補助線40は、自身の全体(全長)において、車両におけるグランド電位部(例えば、車両のボデー)との距離が互いに異なる位置に配置されるとよい。
例えば、図1に示すように、本線30と補助線40とは、グランド電位部51との距離が異なる位置に配置されている。すなわち、本線30と補助線40とは、本線30とグランド電位部51との距離よりも、補助線40とグランド電位部51との距離の方が近くなるように配置されている。換言すると、補助線40は、本線30よりもグランド電位部51との距離が近い位置に配置されている。つまり、本線30は、補助線40よりもグランド電位部51との距離が遠い位置に配置されている。
また、図2に示すように、本線30と補助線40とは、グランド電位部53との距離が同じ位置であり、且つ、本線30とグランド電位部52との距離よりも、補助線40とグランド電位部52との距離の方が近くなるように配置されている。すなわち、本線30と補助線40とは、グランド電位部53との距離は同じであるが、グランド電位部52との距離が異なる位置に配置されている。
ところで、車両におけるエンジンコンパートメント内や車室内の電磁環境は、搭載機器や外来ノイズの影響により、極めて複雑な電磁環境となっている。また、車両は、自身が移動することによって電磁環境が変化するため、電磁環境が複雑になりやすい。つまり、車両に搭載されたECU10とセンサ20の搭載環境に関しても、電磁環境が複雑になりやすい。よって、車両に搭載されたECU10とセンサ20間で通信される信号には、周波数が特定しにくい(すなわち、既知でない周波数の)ノイズが重畳しやすくなる。
そこで、上述のように、本線30と補助線40をグランド電位部との距離が互いに異なる位置に配置することで、各ワイヤーハーネスとグランド電位部との寄生容量が異なる事などにより、各ワイヤーハーネスのインピーダンスを異ならせることができる。よって、本線30と補助線40は、お互いのインピーダンスが異なる位置に配置すると言い換えることもできる。よって、各ワイヤーハーネス(本線30と補助線40)に対するノイズの重畳の仕方は確実に異なる。従って、本線30と補助線40に流れているセンサ信号に対して、同じ周波数のノイズが同時に重畳する確率を低下させることができる。
つまり、複数のワイヤーハーネスのいずれか(例えば、本線30)に流れているセンサ信号にノイズが重畳したとしても、このノイズと同じ周波数のノイズが他のワイヤーハーネス(例えば、補助線40)に流れているセンサ信号に重畳することを抑制することができる。換言すると、ECU10とセンサ20間において、ノイズが重畳していない少なくとも一つの信号を通信しやすくなる。従って、本発明のケーブルの配置構造においては、複雑な電磁環境であっても、ECU10とセンサ20間の通信におけるノイズの影響を軽減することができる。
つまり、本実施の形態においては、従来技術のように特的の周波数帯域のノイズに特化したバイパスコンデンサなどを用いるものではない。よって、ノイズの周波数を限定することなく、数MHzから数GHzまでのノイズに対応可能となる。すなわち、数MHzから数GHzの範囲における同じ周波数のノイズが、本線30に流れるセンサ信号と補助線40に流れるセンサ信号に同時に重畳する確率を低下させることができる。従って、ノイズ周波数が特定出来ないような複雑な電磁環境下において、特に有効なノイズ対策となる。
なお、本実施の形態においては、ECU10とセンサ20とを本線30及び補助線40の2本のワイヤーハーネスで電気的に接続する例を採用しているが、本発明はこれに限定されるものではない。ECU10とセンサ20とは、複数のワイヤーハーネスで接続されていればよい。すなわち、ECU10とセンサ20とは、二本以上のワイヤーハーネスで電気的に接続されていればよく、三本以上のワイヤーハーネスで電気的に接続されていてもよい。
しかしながら、このECU10とセンサ20とを電気的に接続する複数本のワイヤーハーネスには、センサ20から同一の信号が送信(出力)される。そして、同一の信号が送信された複数本のワイヤーハーネスは、車両のグランド電位部との距離が互いに異なる位置に配置される必要がある。
つまり、本発明のケーブルの配線構造は、ECU10とセンサ20とを電気的に接続するワイヤーハーネスとして、少なくとも一方の電子装置(センサ20)から他方の電子装置(ECU10)に対する同一の信号が送信される複数本のワイヤーハーネスを含むものである。すなわち、ECU10とセンサ20とを電気的に接続するワイヤーハーネスである本線30とは別に、ECU10とセンサ20とを電気的に接続するワイヤーハーネスである単数或いは複数の補助線40を備え、この本線30と補助線40には、少なくとも一方の電子装置(センサ20)から他方の電子装置(ECU10)に対する同一の信号が送信されるものである。そして、同一の信号が送信される複数のワイヤーハーネスは、車両におけるグランド電位部との距離が互いに異なる位置に配置されるものであれば、本発明の目的を達成できる。
換言すると、本発明は、移動体に搭載され、二つの電子装置を電気的に接続するワイヤーハーネス(ケーブル)の配置構造であって、ワイヤーハーネスは、二つの電子装置間において複数本設けられ、複数のワイヤーハーネスには、少なくとも一方の電子装置から同一の信号が送信されるものであり、同一の信号が送信される複数のワイヤーハーネスは、移動体におけるグランド電位部との距離が互いに異なる位置に配置されるものであれば、本発明の目的を達成できる。
ここで、図3に基づいて、車両電子システムの処理動作に関して説明する。
本実施の形態における車両電子システムは、上述のようなワイヤーハーネス(本線30と補助線40)の配置構造を有するものである。また、ECU10は、本線30と補助線40を介して受信した複数のセンサ信号におけるノイズ量を算出する(ノイズ量算出手段)。さらに、ECU10は、算出したノイズ量に基づいて、本線30と補助線40を介して受信した複数のセンサ信号から、受信信号として採用する一つの信号を選択する(選択手段)。
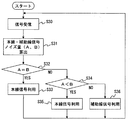
具体的には、図3のフローチャートに示すような処理動作を実行する。
まず、ステップS10では、ECU10は、センサ20からセンサ信号を受信する(信号受信)。次に、ステップS11では、ECU10は、本線30を介して受信したセンサ信号(すなわち、本線信号)のノイズ量(A)を算出する(ノイズ量算出手段)。
ノイズ量の指標としては様々な方法がある。ここでは一例として、SN比(信号対雑音比)をノイズ量の指標とする。つまり、SN比をノイズ評価量として算出する。具体的には、数式S/N=Ps/Pn=(Vs/Vn)2、(Ps=信号電力,Pn=雑音電力,Vs=信号電圧(電流)の実効値,Vn=雑音電圧(電流)の実効値)で算出することができる。
次に、ステップS12では、ECU10は、本線信号のノイズ量(A)とノイズ量の閾値(C)とを比較して、A<Cであると判定した場合はステップS13へ進み、A<Cでない(A≧C)と判定した場合はステップS14へ進む(選択手段)。本線信号のノイズ量(A)が閾値(C)よりも小さいと判定した場合、この本線信号に関しては、ノイズが重畳していない、又はノイズによる顕著な影響がないとみなすことができる。よって、ステップS13では、ECU10は、ノイズ量(A)が閾値(C)よりも小さい本線信号を受信信号として採用する(本線信号利用、選択手段)。つまり、ECU10は、センサ20の検出結果(センサ20が出力した信号、すなわちノイズの影響を受けていないセンサ信号)として、本線30を介して受信したセンサ信号(本線信号)を採用する。
一方、ステップS14では、ECU10は、補助線40を介して受信したセンサ信号(すなわち、補助線信号)のノイズ量(B)を算出する(ノイズ量算出手段)。次に、ステップS15では、ECU10は、補助線信号のノイズ量(B)とノイズ量の閾値(C)とを比較して、B<Cであると判定した場合はステップS16へ進み、B<Cでない(B≧C)と判定した場合はステップS10に戻る(選択手段)。補助線信号のノイズ量(B)が閾値(C)よりも小さいと判定した場合、この補助線信号に関しては、ノイズが重畳していない、又はノイズによる顕著な影響がないとみなすことができる。よって、ステップS16では、ECU10は、ノイズ量(B)が閾値(C)よりも小さい補助線信号を受信信号として採用する(補助線信号利用、選択手段)。つまり、ECU10は、センサ20の検出結果(センサ20が出力した信号、すなわちノイズの影響を受けていないセンサ信号)として、補助線40を介して受信したセンサ信号(補助線信号)を採用する。
このようにすることによって、ECU10は、ノイズが重畳していない信号を採用しやすくなる。よって、本発明の車両電子システムにおいては、複雑な電磁環境であっても、ECU10とセンサ20間の通信におけるノイズの影響を軽減することができる。
つまり、本実施の形態においては、従来技術のように特的の周波数帯域のノイズに特化したバイパスコンデンサなどを用いるものではない。よって、ノイズの周波数を限定することなく、数MHzから数GHzまでのノイズに対応可能となる。すなわち、数MHzから数GHzの範囲における同じ周波数のノイズが、本線30に流れるセンサ信号と補助線40に流れるセンサ信号に同時に重畳する確率を低下させることができる。従って、ノイズ周波数が特定出来ていないような複雑な電磁環境下において、特に有効なノイズ対策となる。
また、このように、ノイズ量と閾値とを比較して、ノイズ量が閾値より小さいと判定したセンサ信号を選択することによって、閾値よりも小さいセンサ信号を受信信号として採用することができる。
また、このように、一方のセンサ信号のノイズ量を算出し、このセンサ信号のノイズ量が閾値を超えていると判定した場合に、他方のセンサ信号のノイズ量を算出し、このセンサ信号のノイズ量が閾値を超えているか判定することによって、最初に算出したセンサ信号のノイズ量が閾値よりも小さい場合、受信した全てのセンサ信号に対してノイズ量を算出する必要がなく、処理を簡素化できるので好ましい。
なお、ここでは、最初に本線30を介して受信したセンサ信号(本線信号)のノイズ量(A)と閾値(C)とを比較し、次に補助線40を介して受信したセンサ信号(補助線信号)のノイズ量(B)と閾値(C)とを比較する例を採用したが本発明はこれに限定されるものではない。例えば、最初に受信したセンサ信号のノイズ量と閾値(C)とを比較し、その後、次に受信したセンサ信号のノイズ量と閾値(C)とを比較するようにしてもよい。よって、最初に補助線40を介して受信したセンサ信号(例えば補助線信号)のノイズ量(B)と閾値(C)とを比較し、次に本線30を介して受信したセンサ信号(例えば本線信号)のノイズ量(A)と閾値(C)とを比較するようにしてもよい。この場合、最初に受信したセンサ信号のノイズ量が閾値よりも小さいと判定した場合、次に受信したセンサ信号に対してノイズ量を算出する必要がなく、処理を簡素化できるので好ましい。
また、受信した全てのセンサ信号(本線信号及び補助線信号)に関してノイズ量(AとB)を算出して、各ノイズ量(A、B)と閾値(C)とを比較して、閾値(C)よりも小さいノイズ量のセンサ信号を受信信号として採用するようにしてもよい。なお、このようにすると、全てのセンサ信号(本線信号及び補助線信号)のノイズ量(AとB)が閾値(C)よりも小さいこともありうる。この場合、全てのセンサ信号に関して、ノイズが重畳していない、又はノイズによる顕著な影響がないとみなすことができる。よって、いずれか一つのセンサ信号を受信信号として採用することができる。
なお、本線信号のノイズ量(A)及び補助線信号のノイズ量(B)がともに閾値(C)を超えていると(閾値(C)に達していると)判定した場合(ステップS15でNO判定の場合)、この本線信号及び補助線信号には、ノイズが重畳しており、ノイズによる顕著な影響があるとみなすことができる。つまり、本線30のセンサ信号と補助線40のセンサ信号に同時に異なる周波数のノイズが重畳することもありうる。この場合、このセンサ信号(本線信号及び補助線信号)を一時的に使用しないようにする(すなわち、新たなセンサ信号を受信するまで待機状態とする)。又は、ノイズ除去などの処理を行うようにしてもよい。
また、センサ20から同一のセンサ信号が送信される三本以上のワイヤーハーネスでECU10とセンサ20とが電気的に接続される場合、ECU10は、受信したセンサ信号を受信した順番にノイズ量の算出、閾値との比較(ノイズ量が閾値よりも小さいセンサ信号は採用)を繰り返し行うようにしてもよい。また、ECU10は、本線信号のノイズ量の算出、閾値との比較(ノイズ量が閾値よりも小さいセンサ信号は採用)を行い、その後、複数の補助線信号のノイズ量の算出、閾値との比較(ノイズ量が閾値よりも小さいセンサ信号は採用)を繰り返し行うようにしてもよい。また、ECU10は、受信した全てのセンサ信号(三つ以上)に関してノイズ量を算出して、各ノイズ量と閾値(C)とを比較して、閾値(C)よりも小さいノイズ量のセンサ信号を受信信号として採用するようにしてもよい。
(その他の実施の形態)
なお、ワイヤーハーネスを流れるセンサ信号に重畳するノイズの周波数は、ワイヤーハーネスの周波数特性に大きく影響される。また、このワイヤーハーネスの周波数特性は、ワイヤーハーネスの長さによって変化するものである。
なお、ワイヤーハーネスを流れるセンサ信号に重畳するノイズの周波数は、ワイヤーハーネスの周波数特性に大きく影響される。また、このワイヤーハーネスの周波数特性は、ワイヤーハーネスの長さによって変化するものである。
例えば、1.5[GHz]のノイズ(高周波ノイズ)では、1波長が20[cm]である。よって、20[cm]の逓倍の長さを持つワイヤーハーネスは、1.5[GHz]の高周波ノイズの影響を受けやすくなるが、20[cm]の逓倍に満たない長さのワイヤーハーネスは影響を受けにくい。
なお、ノイズの周波数と波長の関係は、波長λ[m]=(3×108)/周波数f[Hz]から明らかである。以下にノイズの周波数と波長の一例を示す。周波数1.0[GHz]のノイズでは1波長30[cm]である。周波数1.09[GHz]のノイズでは1波長27.5[cm]である。周波数2.0[GHz]のノイズでは1波長15[cm]である。周波数3.0[GHz]のノイズでは1波長10[cm]である。周波数6.0[GHz]のノイズでは1波長5[cm]である。
そこで、同一の信号が送信され、グランド電位部との距離が互いに異なる位置に配置された本線30と補助線40は、互いに異なる長さを有するようにしてもよい。つまり、上述の実施の形態におけるケーブルの配置構造及び車両電子システムにおいて、本線30の長さと補助線40の長さを互いに異ならせるようにしてもよい。
例えば、本線30の長さが40[cm]の場合、1.5[GHz]のノイズが重畳しやすい。この場合、補助線40の長さを45[cm]とする。つまり、ECU10とセンサ20の間に、本線30と同じセンサ信号がセンサ20から送信されるワイヤーハーネスとして、本線30よりも15[cm]長い45[cm]の補助線40を追加する。つまり、本線30と補助線40は、センサ20から同一のセンサ信号が送信されるものであり、グランド電位部との距離が互いに異なる位置に配置され、且つ、長さが互いに異なるものである。
この例の場合、本線30は、1.5[GHz]のノイズは重畳しやすいが、1.1[GHz]のノイズは重畳しにくい特性を持つことになる。一方、補助線40は、1.5[GHz]のノイズは重畳しにくいが、1.1[GHz]のノイズは重畳しやすい特性を持つことになる。このように、本線30と補助線40とは、それぞれ重畳しやすいノイズの周波数が異なることになる。
このように、本線30の長さと補助線40の長さを異ならせることで、本線30の周波数特性と補助線40の周波数特性とを異ならせることができる。つまり、本線30と補助線40とで重畳しやすいノイズ(周波数)を異ならせることができる。従って、ECU10とセンサ20間においてノイズの影響をより一層軽減することができる。
なお、補助線40の長さの決定方法は、対策したいノイズ周波数の上限により決定すると好ましい。例えば、対策したいノイズの周波数が2[GHz]だった場合、そのノイズの1波長分の長さを本線30に追加延長したものを補助線40の長さとする。これにより本線30と補助線40の周波数特性は、2[GHz]の帯域まで差異が発生し、本線30に流れるセンサ信号に重畳するノイズ成分と補助線40に流れるセンサ信号に重畳するノイズ成分も異なることになる。このように、補助線40の長さを調整することで、数MHzから数GHzの範囲でノイズの重畳の仕方を変化させる。よって、数MHzから数GHzのノイズについて対策が可能となる。つまり、数MHzから数GHzの範囲における同じ周波数のノイズが、本線30に流れるセンサ信号と補助線40に流れるセンサ信号に同時に重畳する確率を低下させることができる。
なお、この本線30と補助線40の長さを異ならせる技術は、上述の実施の形態と組み合わせて実施することも可能であるが、単独で実施することも可能である。
つまり、移動体(例えば車両)に搭載され、二つの電子装置(例えば、ECU10とセンサ20)を電気的に接続するケーブルの配置構造であって、ケーブルとして、少なくとも一方の電子装置(例えば、センサ20)から他方の電子装置(例えばECU10)に対する同一の信号が送信される複数本のケーブル(例えば、本線30と補助線40)を含み、同一の信号が送信される複数のケーブルは、互いに長さが異なり、且つ、移動体におけるグランド電位部との距離が同一の位置に配置されるようにしてもよい。
上述のように車両は、自身が移動することによって電磁環境が変化するため、電磁環境が複雑になりやすい。つまり、車両に搭載されたECU10とセンサ20の搭載環境に関しても、電磁環境が複雑になりやすい。よって、車両に搭載されたECU10とセンサ20で通信される信号には、周波数が特定しにくい(すなわち、既知でない周波数の)ノイズが重畳しやすくなる。
そこで、このように、同一の信号が送信される本線30と補助線40は、互いに長さが異なり、且つ、移動体におけるグランド電位部との距離が同一の位置に配置することで、互いに重畳しやすいノイズ(周波数)を異ならせることができる。よって、本線30と補助線40に流れている信号に対して、同じ周波数のノイズが同時に重畳する確率を低下させることができる。
つまり、複数のケーブルのいずれか(例えば本線30)に流れている信号にノイズが重畳したとしても、このノイズと同じ周波数のノイズが他のケーブル(例えば補助線40)に流れている信号に重畳することを抑制することができる。換言すると、ECU10とセンサ20間において、ノイズが重畳していない少なくとも一つの信号を通信しやすくなる。従って、ECU10とセンサ20間においてノイズの影響を軽減することができる。また、従来技術のように特的の周波数帯域のノイズに特化したバイパスコンデンサなどを用いるものではない。よって、ノイズの周波数を限定することなく、数MHzから数GHzまでのノイズに対応可能となる。
(変形例1)
ここで、変形例1として、図4に示すように、電子装置としてエンジンECU10と吸気圧センサ20を採用した例を説明する。換言すると、上述の実施の形態におけるケーブルの配置構造及び車両電子システムの具体例を変形例1として説明する。従って、車両電子システムにおける処理動作に関しては、上述の実施の形態と同様であるため説明を省略する。また、上述の実施の形態で説明した内容は、変形例1におけるケーブルの配置構造及び車両電子システムに対しても適宜適用することができる。
ここで、変形例1として、図4に示すように、電子装置としてエンジンECU10と吸気圧センサ20を採用した例を説明する。換言すると、上述の実施の形態におけるケーブルの配置構造及び車両電子システムの具体例を変形例1として説明する。従って、車両電子システムにおける処理動作に関しては、上述の実施の形態と同様であるため説明を省略する。また、上述の実施の形態で説明した内容は、変形例1におけるケーブルの配置構造及び車両電子システムに対しても適宜適用することができる。
上述のように、車両を取り巻く電磁環境は複雑であり、特にエンジンコンパートメント内の電磁環境は特に複雑である。例えば、エンジンコンパートメント内に搭載されたエンジン200、点火プラグ、モータなどに加えて、携帯電話などの外来電波の影響が考えられ、ノイズの実態を把握することが困難である。
そこで、本発明のケーブルの配置構造及び車両電子システムをエンジンコンパートメント内に適用すると好適である。一例として、図4に示すように、エンジンECU10と吸気圧センサ20とを電気的に接続するワイヤーハーネスに適用することができる。
図4に示すように、吸気圧センサ20は、エンジン200に搭載される。一方、エンジンECU10は、エンジン200とは別の位置に搭載される。そして、エンジンECU10と吸気圧センサ20は、本線30及び補助線40とで電気的に接続されている。そして、本線30及び補助線40には、吸気圧センサ20から同一のセンサ信号が送信(出力)される。さらに、この本線30と補助線40とは、グランド電位部54との距離が異なる位置に配置されている。すなわち、本線30と補助線40とは、本線30とグランド電位部54との距離よりも、補助線40とグランド電位部51との距離の方が遠くなるように配置されている。換言すると、補助線40は、本線30よりもグランド電位部51との距離が遠い位置に配置されている。つまり、本線30は、補助線40よりもグランド電位部51との距離が近い位置に配置されている。これによって、上述の実施の形態と同様の効果を奏することができる。
(変形例2)
ここで、変形例2として、図5に示すように、電子装置としてABS(Anti-lock Braking System)ECU(電子装置)10と車輪速センサ(電子装置)20を採用した例を説明する。換言すると、上述の実施の形態におけるケーブルの配置構造及び車両電子システムの具体例を変形例2として説明する。従って、車両電子システムにおける処理動作に関しては、上述の実施の形態と同様であるため説明を省略する。また、上述の実施の形態で説明した内容は、変形例2におけるケーブルの配置構造及び車両電子システムに対しても適宜適用することができる。
ここで、変形例2として、図5に示すように、電子装置としてABS(Anti-lock Braking System)ECU(電子装置)10と車輪速センサ(電子装置)20を採用した例を説明する。換言すると、上述の実施の形態におけるケーブルの配置構造及び車両電子システムの具体例を変形例2として説明する。従って、車両電子システムにおける処理動作に関しては、上述の実施の形態と同様であるため説明を省略する。また、上述の実施の形態で説明した内容は、変形例2におけるケーブルの配置構造及び車両電子システムに対しても適宜適用することができる。
変形例2においては、図5に示すように、車輪速センサ20は、車両の各タイヤ(車輪)内に搭載される。一方、ABSECU10は、車室内に搭載される。そして、ABSECU10と車輪速センサ20は、本線30及び補助線40とで電気的に接続されている。そして、本線30及び補助線40には、各車輪速センサ20から同一のセンサ信号が送信(出力)される。例えば、左側の前輪に設けられた車輪速センサ20とABSECU10とを電気的に接続本線30及び補助線40には、この車輪速センサ20から同一のセンサ信号が送信(出力)される。さらに、この本線30と補助線40とは、グランド電位部55との距離が異なる位置に配置されている。これによって、上述の実施の形態と同様の効果を奏することができる。
(変形例3)
上述の実施の形態においては、複数のセンサ信号のノイズ量が全て閾値を超えていた場合、このセンサ信号(本線信号及び補助線信号)を一時的に使用しないようにするか、ノイズ除去などの処理を行う例を採用したが本発明はこれに限定されるものではない。
上述の実施の形態においては、複数のセンサ信号のノイズ量が全て閾値を超えていた場合、このセンサ信号(本線信号及び補助線信号)を一時的に使用しないようにするか、ノイズ除去などの処理を行う例を採用したが本発明はこれに限定されるものではない。
本発明の車両電子システムは、図6に示すフローチャートに示す処理動作を実行するようにしてもよい(変形例3)。
なお、この図6に示すフローチャートにおけるステップS20〜S26に関しては、図3に示すフローチャートおけるステップS10〜S16と同様であるため詳しい説明は省略する。
つまり、ステップS25の判定処理において、補助線信号のノイズ量(B)が閾値(C)に達していると判定(B<Cでない)した場合、ステップS27へ進む。
ステップS27では、ECU10は、本線信号のノイズ量(A)と補助線信号のノイズ量(B)とを比較して、A<Bでない(A≧B)と判定した場合はステップS26へ進み、A<Bであると判定した場合はステップS28へ進む。
ステップS26では、ECU10は、センサ20の検出結果(センサ20が出力したセンサ信号、すなわちノイズの影響を受けていないセンサ信号)として、補助線40を介して受信したセンサ信号(補助線信号)を採用する。一方、ステップS28では、ECU10は、センサ20の検出結果(センサ20が出力したセンサ信号、すなわちノイズの影響を受けていないセンサ信号)として、本線30を介して受信したセンサ信号(本線信号)を採用する。
このように各ケーブル(本線30及び補助線40)を介して受信した複数のセンサ信号のノイズ量が全て閾値を超えていた場合は、受信した複数のセンサ信号のノイズ量を比較して、ノイズ量が最も小さいセンサ信号を選択するようにしてもよい。
このようにすることによって、各ケーブル(本線30及び補助線40)を介して受信した複数のセンサ信号のノイズ量が全て閾値を超えていた場合であっても、少なくとも一つのセンサ信号(ノイズ量が閾値を超えている複数の信号の中で最もノイズ量が小さい信号)を受信信号として採用することができる。
(変形例3)
上述の実施の形態においては、複数のセンサ信号のノイズ量と閾値とを比較して、採用するセンサ信号を選択する例を採用したが本発明はこれに限定されるものではない。
上述の実施の形態においては、複数のセンサ信号のノイズ量と閾値とを比較して、採用するセンサ信号を選択する例を採用したが本発明はこれに限定されるものではない。
本発明の車両電子システムは、図7に示すフローチャートに示す処理動作を実行するようにしてもよい(変形例4)。
まず、ステップS30では、ECU10は、センサ20からセンサ信号を受信する(信号受信)。次に、ステップS31では、ECU10は、本線30を介して受信したセンサ信号(すなわち、本線信号)のノイズ量(A)、及び補助線40を介して受信したセンサ信号(すなわち、補助線信号)のノイズ量(B)を算出する(ノイズ量算出手段)。
次に、ステップS32では、ECU10は、本線信号のノイズ量(A)と補助線信号のノイズ量(B)とを比較して、A=Bであると判定した場合はステップS33へ進み、A=Bでないと判定した場合はステップS34へ進む。
ステップS33では、ECU10は、センサ20の検出結果(センサ20が出力したセンサ信号、すなわちノイズの影響を受けていないセンサ信号)として、本線30を介して受信したセンサ信号(本線信号)を採用する。
一方、ステップS34では、ECU10は、本線信号のノイズ量(A)と補助線信号のノイズ量(B)とを比較して、A<Bであると判定した場合はステップS35へ進み、A<Bでない(A≧B)と判定した場合はステップS36へ進む。
ステップS35では、ステップS33と同様に、ECU10は、センサ20の検出結果(センサ20が出力したセンサ信号、すなわちノイズの影響を受けていないセンサ信号)として、本線30を介して受信したセンサ信号(本線信号)を採用する。
ステップS36では、ECU10は、センサ20の検出結果(センサ20が出力したセンサ信号、すなわちノイズの影響を受けていないセンサ信号)として、補助線40を介して受信したセンサ信号(補助線信号)を採用する。
このように、各ケーブル(本線30及び補助線40)を介して受信した複数の信号のノイズ量を比較して、ノイズ量が最も小さい信号を選択するようにしてもよい。このようにすることによって、閾値などを用いることなく受信信号としての信号を選択することができる。
なお、上述の実施の形態や変形例においては、本発明の移動体電子システム及びケーブルの配置構造を車両(4輪自動車)に搭載した例を採用したが本発明はこれに限定されるものではない。例えば、2輪自動車(モーターサイクル)、船、飛行機、鉄道などの移動体に適用しても目的を達成できる。
また、上述のように、電子装置の一例としてECU(エンジンECU、ABSECU)、センサ(吸気圧センサ、車輪速センサ)を採用して説明したが本発明はこれに限定されるものではない。例えば、ホイール回転数センサ、加速度センサ、ヨーレートセンサ、操舵角センサ、温度センサ、エアフローメーター、O2センサ、A/Fセンサ、エンジン制御用温度センサ(水温センサ・吸気温センサ)、油温センサ、タイヤ空気圧センサ、オートエアコン用センサ(外気センサ・日射センサ・内気センサ・吸込温度センサ・冷媒圧力センサ・水温センサ)、オートライトセンサ、液レベルセンサ、レインセンサ、排出ガス検知センサ(CO,HC,CO2用ガスセンサ)、スロットルポジションセンサ、クランクポジションセンサ、カムポジションセンサ、ノックセンサ、アクセルポジションセンサ、ステアリングセンサ、ヨーレートセンサ、ハイトコントロールセンサ、車輪速センサ、電動パワーステアリング用トルクセンサ、超音波センサ、タッチセンサ、ナビ用角速度センサなどの各種センサも採用することができる。さらに、ABSアクチュエータ、エアバッグ、電子スロットなどの各種アクチュエータなども採用することができる。なお、電子装置としてアクチュエータを採用する場合、ノイズ量の算出機能(ノイズ量算出手段)及び信号の選択機能(選択手段)は、アクチュエータに搭載されるものである。
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることはなく、本発明の趣旨を逸脱しない範囲において、種々の変形が可能である。
10 ECU(電子装置)、20 センサ(電子装置)、30 本線(ケーブル)、40 補助線(ケーブル)、51〜54 グランド電位部、100 車両電子システム(移動体電子システム)、200 エンジン
Claims (8)
- 移動体に搭載され、二つの電子装置を電気的に接続するケーブルの配置構造であって、
前記ケーブルとして、少なくとも一方の前記電子装置から他方の前記電子装置に対する同一の信号が送信される複数本のケーブルを含み、
同一の信号が送信される複数の前記ケーブルは、前記移動体におけるグランド電位部との距離が互いに異なる位置に配置されることを特徴とするケーブルの配置構造。 - 同一の信号が送信され、前記グランド電位部との距離が互いに異なる位置に配置された複数の前記ケーブルは、互いに異なる長さを有することを特徴とする請求項1に記載のケーブルの配置構造。
- 移動体に搭載される二つの電子装置と、
二つの前記電子装置を電気的に接続するケーブルと、を備え、
前記ケーブルとして、少なくとも一方の前記電子装置から他方の前記電子装置に対する同一の信号が送信される複数本のケーブルを含み、
同一の信号が送信される複数の前記ケーブルは、前記移動体におけるグランド電位部との距離が互いに異なる位置に配置されるものであり、
二つの前記電子装置のうち前記ケーブルを介して信号を受信する電子装置は、
各ケーブルを介して受信した複数の信号におけるノイズ量を算出するノイズ量算出手段と、
前記ノイズ量に基づいて、各ケーブルを介して受信した複数の信号から、受信信号として採用する一つの信号を選択する選択手段と、
を備えることを特徴とする移動体電子システム。 - 前記選択手段は、前記ノイズ量と閾値とを比較して、閾値より小さいと判定した信号を選択することを特徴とする請求項3に記載の移動体電子システム。
- 前記ノイズ量算出手段は、最初に受信した信号のノイズ量を算出し、前記選択手段にて最初に受信した信号の当該ノイズ量が閾値を超えていると判定された場合に、次に受信した信号のノイズ量を算出することを特徴とする請求項4に記載の移動体電子システム。
- 前記選択手段は、各ケーブルを介して受信した複数の信号の前記ノイズ量が全て閾値を超えていた場合は、受信した複数の信号の前記ノイズ量を比較して、当該ノイズ量が最も小さい信号を選択することを特徴とする請求項4又は5に記載の移動体電子システム。
- 前記選択手段は、各ケーブルを介して受信した複数の信号の前記ノイズ量を比較して、当該ノイズ量が最も小さい信号を選択することを特徴とする請求項3に記載の移動体電子システム。
- 同一の信号が送信され、前記グランド電位部との距離が互いに異なる位置に配置された複数の前記ケーブルは、互いに異なる長さを有することを特徴とする請求項3乃至7のいずれか一項に記載の移動体電子システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011053372A JP2012188020A (ja) | 2011-03-10 | 2011-03-10 | ケーブルの配置構造、及びこの配置構造を有する移動体電子システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011053372A JP2012188020A (ja) | 2011-03-10 | 2011-03-10 | ケーブルの配置構造、及びこの配置構造を有する移動体電子システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012188020A true JP2012188020A (ja) | 2012-10-04 |
Family
ID=47081658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011053372A Pending JP2012188020A (ja) | 2011-03-10 | 2011-03-10 | ケーブルの配置構造、及びこの配置構造を有する移動体電子システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012188020A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016197049A (ja) * | 2015-04-03 | 2016-11-24 | 株式会社デンソー | 角速度検出装置 |
| JP2018034776A (ja) * | 2016-08-26 | 2018-03-08 | 株式会社デンソー | 車載装置 |
| JP2019055686A (ja) * | 2017-09-21 | 2019-04-11 | 本田技研工業株式会社 | 電動車両のハーネス配策構造 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2548042B2 (ja) * | 1989-09-08 | 1996-10-30 | ハネウエル・インコーポレーテツド | ローカルエリアネットワークの各能動モジュールを一対のケーブルを介して通信させる方法 |
| JP2006042276A (ja) * | 2004-07-30 | 2006-02-09 | Yazaki Corp | 車両用電源重畳多重通信システム |
| JP2010098529A (ja) * | 2008-10-16 | 2010-04-30 | Yazaki Corp | 電源重畳多重通信システム |
| JP2010220172A (ja) * | 2009-03-19 | 2010-09-30 | Hitachi Kokusai Electric Inc | 列車通信システム |
| JP2011004038A (ja) * | 2009-06-17 | 2011-01-06 | Hitachi Ltd | 半導体lsiおよび半導体装置 |
-
2011
- 2011-03-10 JP JP2011053372A patent/JP2012188020A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2548042B2 (ja) * | 1989-09-08 | 1996-10-30 | ハネウエル・インコーポレーテツド | ローカルエリアネットワークの各能動モジュールを一対のケーブルを介して通信させる方法 |
| JP2006042276A (ja) * | 2004-07-30 | 2006-02-09 | Yazaki Corp | 車両用電源重畳多重通信システム |
| JP2010098529A (ja) * | 2008-10-16 | 2010-04-30 | Yazaki Corp | 電源重畳多重通信システム |
| JP2010220172A (ja) * | 2009-03-19 | 2010-09-30 | Hitachi Kokusai Electric Inc | 列車通信システム |
| JP2011004038A (ja) * | 2009-06-17 | 2011-01-06 | Hitachi Ltd | 半導体lsiおよび半導体装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016197049A (ja) * | 2015-04-03 | 2016-11-24 | 株式会社デンソー | 角速度検出装置 |
| JP2018034776A (ja) * | 2016-08-26 | 2018-03-08 | 株式会社デンソー | 車載装置 |
| JP7003449B2 (ja) | 2016-08-26 | 2022-01-20 | 株式会社デンソー | 車載装置 |
| JP2019055686A (ja) * | 2017-09-21 | 2019-04-11 | 本田技研工業株式会社 | 電動車両のハーネス配策構造 |
| US10486623B2 (en) | 2017-09-21 | 2019-11-26 | Honda Motor Co., Ltd. | Harness routing structure of electric vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9886801B2 (en) | Vehicle sensor compensation | |
| US9067618B2 (en) | Touch-based system for controlling an automotive steering wheel | |
| WO2014155255A1 (en) | Method for determining the location of a remote transmitter positioned near a vehicle | |
| CN107433950B (zh) | 用于反映环境的自学系统 | |
| CN101647207A (zh) | 电力线通信系统 | |
| JP2010066261A (ja) | 車輪荷重を検出するための方法および測定システム | |
| US20170254897A1 (en) | Systems and methods for remote monitoring with radar | |
| US20150055564A1 (en) | Methods and apparatus for configuration of a vehicle-based wireless signal transmission range | |
| JP2012188020A (ja) | ケーブルの配置構造、及びこの配置構造を有する移動体電子システム | |
| JP2018040631A5 (ja) | ||
| CN115754926A (zh) | 信号传输方法及装置、信号处理方法及装置以及雷达系统 | |
| CN111372820A (zh) | 车载系统以及检测器集线器 | |
| US11130483B2 (en) | System and method for controlling turning of vehicle | |
| WO2020040088A1 (ja) | 物体検知装置 | |
| CN102529852B (zh) | 车辆及车速信号处理系统 | |
| CN117184215B (zh) | 车辆控制方法、装置、存储介质及车辆 | |
| US11143747B2 (en) | Methods and systems for classifying received signals from radar system | |
| JP2007216904A (ja) | 車両状態量検出装置 | |
| EP4307475A1 (en) | Antenna and terminal device | |
| KR101601517B1 (ko) | 튜닝차량상태 검출시스템 및 방법 | |
| JP7332394B2 (ja) | タイヤ圧力監視システム | |
| US20210320639A1 (en) | Adjustable electrical noise filter for a vehicle | |
| JP6753120B2 (ja) | 周辺監視システム | |
| JP4525390B2 (ja) | 警戒対象検出装置及び警戒対象検出システム | |
| US20240280063A1 (en) | Torque compensation for air/fuel switching |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140805 |