JP2012191817A - 電磁アクチュエータ - Google Patents
電磁アクチュエータ Download PDFInfo
- Publication number
- JP2012191817A JP2012191817A JP2011055326A JP2011055326A JP2012191817A JP 2012191817 A JP2012191817 A JP 2012191817A JP 2011055326 A JP2011055326 A JP 2011055326A JP 2011055326 A JP2011055326 A JP 2011055326A JP 2012191817 A JP2012191817 A JP 2012191817A
- Authority
- JP
- Japan
- Prior art keywords
- mover
- axis
- electromagnets
- electromagnetic actuator
- output shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Abstract
【課題】可動子を初期位置に復帰させる動作に寄与する部材を有し、その撓みを抑えることができ、さらに漏れ磁束を抑制して少ない電流で高効率に動作することができる電磁アクチュエータを提供すること。
【解決手段】固定子2と、可動子1内部の空間に配置された軸受ユニットとの間には、可動子1の空間を介して板バネが接続されている。板バネは、x軸、y軸、またはこれらの合成軸の周りでの可動子1の回転を支持する。上段側の電磁石3と、下段側の電磁石3とは、z軸方向で見て同じ回転角度位置において同じ極性となるように励磁される。下段側のすべての電磁石3が電流値i0で励磁された場合、上段側のすべての電磁石3の電流値i0+iで励磁される。また、上段及び下段側の電磁石3のコアが、可動子1の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有する。
【選択図】図6
【解決手段】固定子2と、可動子1内部の空間に配置された軸受ユニットとの間には、可動子1の空間を介して板バネが接続されている。板バネは、x軸、y軸、またはこれらの合成軸の周りでの可動子1の回転を支持する。上段側の電磁石3と、下段側の電磁石3とは、z軸方向で見て同じ回転角度位置において同じ極性となるように励磁される。下段側のすべての電磁石3が電流値i0で励磁された場合、上段側のすべての電磁石3の電流値i0+iで励磁される。また、上段及び下段側の電磁石3のコアが、可動子1の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有する。
【選択図】図6
Description
本発明は、多自由度駆動を可能とする電磁アクチュエータに関する。
特許文献1には、球面全方位の駆動が可能であり、ロボットの肩関節や眼球の駆動に応用が期待される三自由度球面電磁アクチュエータが開示されている。
この電磁アクチュエータは、可動子と、この可動子を3軸(x軸、y軸、z軸)方向のまわりに回転トルクを発生させる固定子を備えている。可動子は、xy平面に平行な周方向に沿って分割された4つの磁性体と、これら磁性体の間に90°おきに挿入された4つの永久磁石とを含む。固定子は、可動子の外周側に所定のエアギャップを介して配置されており、z軸方向に沿って上下二つに分割されている。個々の固定子はそれぞれ、6個の磁極をもつ同一材質の磁性体で形成されており、各磁極の極性を制御することで、可動子をz軸のまわりに360°、x軸及びy軸のまわりに所定角度範囲にわたって回転させることが可能である(例えば、特許文献1の明細書段落[0017]参照)。
しかしながら、上記構成を有する電磁アクチュエータにおいては、x軸及びy軸の周りへの可動子の回転範囲に制限があるため、この制限を超えて可動子を回転させた場合、可動子が初期位置へ復帰できなくなるという不都合がある。
特に、上記電磁アクチュエータを搬送ロボット等の関節部に適用した場合、被搬送体の自重やアームに加わる外力に起因するモーメントを受けることで、可動子に対してx軸、y軸またはこれらの合成軸の周りに機械的な回転トルクが作用する。この回転トルクによって可動子が所定角度範囲を超えて回転した場合、固定子による電磁トルクでは可動子が復帰位置へ復帰できなくなるおそれがある。この場合、当該電磁アクチュエータによる関節部としての所期の機能が果たせなくなり、搬送ロボットの動作不良を招く。
そこで、可動子が初期位置へ復帰できるようにするために、固定子と可動子とをバネで接続することが考えられる。しかしながら、バネの剛性が低すぎる場合、可動子の重量によりバネが撓み、可動子が所期の動作を行うことができなくなるという問題がある。
また、このような特殊な動きをする可動子を持つ電磁アクチュエータであっても、漏れ磁束を抑制することにより、少ない電流で高効率に動作できることが要求される。
以上のような事情に鑑み、本発明の目的は、可動子を初期位置に復帰させる動作に寄与する部材が搭載され、かつ、その部材の撓みを抑えることができ、さらに漏れ磁束を抑制して少ない電流で高効率に動作することができる電磁アクチュエータを提供することにある。
上記目的を達成するため、本発明の一形態に係る電磁アクチュエータは、
第1の可動子部と、第2の可動子部と、前記第1の可動子部及び前記第2の可動子部の間に空間を形成するように、前記第1及び前記第2の可動子部を同軸で連結する出力軸とを有する可動子と、
前記可動子の周囲に配置された第1の電磁石群と、前記可動子の周囲に配置され、前記出力軸に沿う方向で前記第1の電磁石群に対応するように配置された第2の電磁石群とを有し、前記第1及び前記第2の電磁石群が、前記可動子の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有し、前記第1及び前記第2の電磁石群を用いて、前記出力軸を回転中心とする第1のトルク、前記出力軸と直交する軸を回転中心とする第2のトルク及び前記出力軸に沿った方向での並進推力を、前記可動子に発生させる固定子と、
前記可動子の前記空間内に設けられ、前記第1のトルクによる前記可動子の回転を支持する軸受ユニットと、
前記可動子の前記空間を介して前記固定子と前記軸受ユニットとの間に接続され、前記第2のトルクによる前記可動子の回転を支持する支持部材と
を具備する。
第1の可動子部と、第2の可動子部と、前記第1の可動子部及び前記第2の可動子部の間に空間を形成するように、前記第1及び前記第2の可動子部を同軸で連結する出力軸とを有する可動子と、
前記可動子の周囲に配置された第1の電磁石群と、前記可動子の周囲に配置され、前記出力軸に沿う方向で前記第1の電磁石群に対応するように配置された第2の電磁石群とを有し、前記第1及び前記第2の電磁石群が、前記可動子の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有し、前記第1及び前記第2の電磁石群を用いて、前記出力軸を回転中心とする第1のトルク、前記出力軸と直交する軸を回転中心とする第2のトルク及び前記出力軸に沿った方向での並進推力を、前記可動子に発生させる固定子と、
前記可動子の前記空間内に設けられ、前記第1のトルクによる前記可動子の回転を支持する軸受ユニットと、
前記可動子の前記空間を介して前記固定子と前記軸受ユニットとの間に接続され、前記第2のトルクによる前記可動子の回転を支持する支持部材と
を具備する。
固定子の第1の電磁石群の各電磁石のうち少なくも2つ(及び第2の電磁石群の各電磁石のうち少なくとも2つ)に互いに異なる向きの磁束をそれぞれ発生させることにより第1のトルクを発生させることができる。これにより、可動子は出力軸を回転中心として回転することができる。また、第1の電磁石群のうち少なくとも1つの電磁石と、出力軸の方向で見てその電磁石の回転角度位置とは異なる回転角度位置に配置された、第2の電磁石群のうち少なくとも1つの電磁石とに、励磁のための互いに異なる値の電流をそれぞれ加えることにより、第2のトルクを発生させることができる。これにより、可動子は出力軸を回転中心として回転(傾動または揺動)することができる。
軸受ユニットは第1のトルクによる可動子の回転を支持する。一方、支持部材は固定子と軸受ユニットとの間に接続されているので、第2のトルクによる可動子の回転を支持し、特に、可動子の初期位置への復帰動作に寄与することができる。
ここで、仮に支持部材の剛性が低すぎる場合に可動子の重量によって撓みが発生する場合があっても、第1及び第2の電磁石群による、出力軸に沿った方向での並進推力を利用することにより、その撓みの発生を抑えることができる。すなわち、出力軸方向が重力方向である場合に、可動子の重力の方向とは反対方向に並進推力が発生するように、第1及び第2の電磁石群の励磁が制御されることにより、可動子を初期位置に復帰させることができる。
また、支持部材の撓みの許容範囲をできるだけ小さくする等の、支持部材の厳格な設計を必要としない。
さらに、可動子の第2のトルクによる可動子の回転時、支持部材の撓みが抑えられることにより、可動子の動きの制御時においてその撓みによる弾性力が外乱にならないので、小さい第2のトルクにより可動子を回転させることができる。
さらに、可動子は、第1及び第2のトルクによる可動子の回転運動だけでなく、出力軸に沿った方向での可動子の並進移動も可能となるので、電磁アクチュエータの応用範囲を広げることができる。
また、本発明では、第1及び第2の電磁石群が、可動子の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有するため、可動子が回転動作や並進動作を行う時に、可動子の外周面と、第1及び第2の電磁石群のそれぞれの内周面とがそれぞれ高精度に所期のギャップを保つことができ、また、そのギャップをできるだけ狭く保つことができる。これにより、そのギャップにおける漏れ磁束の発生を抑制し、少ない電流で高効率に動作することができる電磁アクチュエータを実現することができる。
前記支持部材は、前記出力軸に垂直な面内で配置された板バネであってもよい。支持部材が板バネであることにより、第1及び第2の可動子部の間に形成される空間の、出力軸方向の厚さを薄くすることができる。これにより、電磁アクチュエータの薄型化を実現することができる。
以上、本発明によれば、可動子を初期位置に復帰させる動作に寄与する支持部材が搭載され、かつ、その支持部材の撓みを抑えることができる電磁アクチュエータを実現することができる。また、漏れ磁束を抑制して少ない電流で高効率に動作することができる。
以下、図面を参照しながら、本発明の実施形態を説明する。
[電磁アクチュエータの構成]
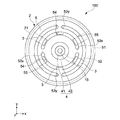
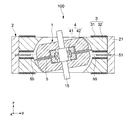
図1は、本発明の一実施形態に係る電磁アクチュエータを示す平面図である。図2は、図1におけるA−A線での断面図である(B−B線またはC−C線も同様)。図1では、互いに直交するx軸、y軸、及びz軸を有するxyz空間において、電磁アクチュエータ100を図示している。本発明の一実施形態に係る電磁アクチュエータ100は、可動子をx軸、y軸、及びz軸の各軸周りに回転駆動可能な球面アクチュエータの一種として構成されている。
図1は、本発明の一実施形態に係る電磁アクチュエータを示す平面図である。図2は、図1におけるA−A線での断面図である(B−B線またはC−C線も同様)。図1では、互いに直交するx軸、y軸、及びz軸を有するxyz空間において、電磁アクチュエータ100を図示している。本発明の一実施形態に係る電磁アクチュエータ100は、可動子をx軸、y軸、及びz軸の各軸周りに回転駆動可能な球面アクチュエータの一種として構成されている。
電磁アクチュエータ100は、可動子1と固定子2とを備える。可動子1は、xy平面内の円周方向に沿って4つの分割された磁性体11と、隣接する2つの磁性体11の各間に等ピッチ(90°間隔)で挿入された4つの永久磁石12(例えば、Br=1.4T)とを有している。すなわち、可動子1は、円周方向に2つの磁極対を有する。永久磁石12は、図1に示す矢印dの向きに着磁されている。
固定子2は、外周側の壁を形成する筒状のフレーム21と、このフレーム21に設けられ可動子1を駆動するための複数の電磁石3を有する。これら電磁石3は、コア32及びこのコア32に巻かれたコイル31で構成されている。電磁石3は、上段及び下段にそれぞれ6個ずつ設けられている。上段側の複数の電磁石3(第1の電磁石群)と、下段側の複数の電磁石3(第2の電磁石群)とは、z軸方向で対称位置となるように配置されている。
各コア32は、それぞれ可動子1に向けて突出するように、フレーム21の内周面側に等ピッチ(z軸方向で見て60°間隔)取り付けられている。コア32の端部である磁極321の先端面は、可動子1の外周面と対向している。
各コイル31に供給される電流は独立して制御することが可能となっており、これにより12個の磁極321のそれぞれにおける励磁量も独立に制御することが可能となっている。
図2に示すように、可動子1は、第1の可動子部13と、第2の可動子部14と、これら第1の可動子部13及び第2の可動子部14を同軸で連結する出力軸15とを有する。出力軸15は、第1の可動子部13及び第2の可動子部14の間に空間Dを形成するように、それらを連結する。
第1の可動子部13及び第2の可動子部14は、同一の構成を有しており、上述したように、4つの分割された磁性体11と、これら磁性体11の間に設けられた4つの永久磁石12をそれぞれ有する。第1の可動子部13の磁性体11と、第2の可動子部14の磁性体11とは、z軸方向で見て同じ角度位置にそれぞれ配置されている。また、第1の可動子部13の永久磁石12と、第2の可動子部14の永久磁石12とは、z軸方向で見て同じ角度位置にそれぞれ配置されている。
第1及び第2の可動子部13及び14の外周部のz軸方向の厚さが、それらの内周部のz軸方向の厚さよりそれぞれ厚く形成されている。これにより、空間Dは、z軸方向の幅が広い内周側空間D1と、z軸方向の幅が狭い外周側空間D2とに分けられる。
第1の可動子部13及び第2の可動子部14の側面は球面の一部となっており、また、それらの球面に対応するように、コア32の、第1の可動子部13及び第2の可動子部14にそれぞれ対面する面もそれぞれ球面となっている。
出力軸15のz軸方向での中心であって、内周側空間D1には、出力軸15の軸受ユニット4が設けられている。軸受ユニット4は、出力軸15をz軸周りに回転自在に支持する軸受41と、軸受ユニット4を保持する軸受ホルダ42とを有する。
固定子2のフレーム21と軸受ユニット4との間には、空間Dを介して、支持部材としての板バネ5が接続されている。板バネ5は、x軸、y軸、またはこれらの合成軸の周りでの可動子1の回転を支持する機能を有する。
図3は、可動子1の第1及び第2の可動子部13及び14、また、図2で示す上段の各電磁石3の図示をそれぞれ省略した状態の電磁アクチュエータ100を示す平面図である。板バネ5の外形は円形である。上記のように、板バネ5の外周縁51はフレーム21に接続されて固定され、また、その内周縁52は軸受ユニット4に接続され固定されている。
板バネ5には、円弧状の2つのスリット54と、それらのスリット54より外周側に配置された円弧状の2つのスリット55とが形成されている。スリット54が並ぶ方向は例えばy軸に沿った方向であり、各スリット54の端部の間には連結部53xがそれぞれ形成されている。外周側のスリット55が並ぶ方向は例えばx軸に沿った方向であり、各スリット54の端部の間には連結部53yがそれぞれ形成されている。これにより、可動子1(図2参照)は、連結部53xを回転中心としてx軸周りに回転可能となり、また、連結部53yを回転中心としてy軸周りに回転可能となる。
板バネ5の材料は、ステンレス、アルミニウム、樹脂等の非磁性材であるが、磁性材であってもよい。
図4は、図2に示す状態から、可動子1がx軸周りに回転(傾動)した状態を示す断面図である。y軸周りも同様である。この図に示すように、可動子1(出力軸15、第1の可動子部13及び第2の可動子部14)は、軸受ユニット4と一体的に回転する。また、このような構成の板バネ5によれば、その剛性が適宜調整されることにより、x及びy軸の合成軸の周りでも可動子1が回転可能となる。
図2に示すように、上段側の複数の電磁石3(第1の電磁石群)の内周面35aと、下段側の複数の電磁石3(第2の電磁石群)の内周面35bとが、可動子1の第1の可動子部13及び第2の可動子部14のそれぞれの外周面131及び141にそれぞれ対向している。そして、内周面35aの形状と外周面131の形状とが対応し、内周面35bの形状と外周面141の形状とが対応している。
具体的には、それら外周面131、141、内周面35a、35bの形状は、球面の一部の形状でなる。このような構成により、可動子1が回転動作や並進動作を行う時に、可動子1の外周面131及び141と、電磁石3の内周面35a及び35bとが、それぞれ高精度に所期のギャップを保つことができ、また、そのギャップをできるだけ狭く保つことができる。これにより、そのギャップにおける漏れ磁束の発生を抑制し、少ない電流で高効率に動作することができる電磁アクチュエータを実現することができる。
なお、上記外周面131、141、内周面35a、35bの形状は球面の一部に限られず、楕円面の一部、双曲面の一部、楕円放物面の一部等の、二次曲面の一部であってもよい。
[電磁アクチュエータの動作原理]
以下、電磁アクチュエータ100の動作原理を説明する。
以下、電磁アクチュエータ100の動作原理を説明する。
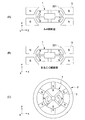
まず、x軸周りの回転運動について動作原理を説明する。図5(A)は、図1で示したx軸に垂直な断面、すなわちA−A線断面を表している。ここで、A−A線断面内には4つの磁極321が存在している。また、これら4つの磁極321に対向する磁性体11は、永久磁石12の着磁方向により、S極の磁性を示している。
今、図5(A)で示した磁極が現れるようにコイル31が励磁されると、可動子1は図中の矢印方向にトルク(つまり、電磁トルク)を得ることができる。また、コイル31の電流を反転させると、可動子1は図5(A)とは反対方向にトルクを得ることになる。x軸周りの回転におけるトルク量は、A−A線断面内に存在するコア32に巻かれたコイル31への電流量を調整することによって制御可能である。
次に、y軸周りの回転運動について、図5(B)をもとに説明する。図5(B)はA−A線断面をz軸周りに60°回転させた断面、すなわちB−B線断面またはC−C線断面を示している。ここで、B−B線断面及びC−C線断面においても、その断面内には4つの磁極321が存在している。また、これら4つの磁極321に対向する磁性体11は、永久磁石12の着磁方向により、N極の磁性を示している。
なお、y軸は、図1におけるB−B線またはC−C線の間に位置する線であるが、B−B線断面内にある磁極321及びC−C線断面内にある磁極321は、それぞれ同じ極性になるように制御されるので、図5(B)で示した1つの図で動作原理を説明することができる。
今、図5(B)で示した磁極が現れるようにコイル31が励磁されると、可動子1は図中の矢印方向にトルクを得ることができる。また、コイル31の電流を反転させると、可動子1は図5(B)とは反対方向にトルクを得ることになる。すなわち、B−B線断面及びC−C線断面の両方において、同様の作用によって同じ大きさのトルクを作用させれば、可動子に働く合力はy軸周りの回転トルクとなる。y軸周りの回転におけるトルク量は、B−B線断面またはC−C線断面内に存在するコア32に巻かれたコイル31への電流量を調整することによって制御可能である。
最後に、z軸周りの回転について、図5(C)をもとに動作原理を説明する。図5(C)はz軸に垂直な断面図を示している。今、図5(C)で示した磁極が現れるようコイル31が励磁され、つまり、z軸周りの方向で180°離れた各電磁石が同相となるように、コイル31が励磁され、可動子1は図中の矢印方向にトルクを得ることができる。z軸に沿って配置された2つの固定子についてそれぞれ同じ磁極を発生させれば、z軸以外の軸にはトルクは発生しないことになる。また、コイル31の電流を反転させると、可動子1は反対方向にトルクを得ることになる。z軸周りの回転におけるトルク量は、コア32に巻かれたコイル31への電流量を調整することによって制御可能である。
以上のように、特に図5(A)及び(B)を用いて説明したように、x軸またはy軸周りに可動子1が回転(傾動または揺動)することができる。可動子1は、上記のように板バネ5が取り付けられているので、初期位置に復帰することができる。また、上記したように、板バネ5の剛性が適宜調整されることにより、x及びy軸の合成軸の周りでも可動子1が回転可能となる。
ここで、仮に板バネ5に撓みが発生したとしても、以下のようにしてその撓みの発生を抑制することができる。図6(A)はその動作原理を説明するための平面図であり、図6(B)は図6(A)におけるA−A線断面図である。
例えば図6(A)に示すように、各電磁石3が、それぞれ図示するような磁極を持つように励磁されたとする。上段側の電磁石3と、下段側の電磁石3とは、z軸方向で見て同じ回転角度位置において同じ極性となるように励磁される。本実施形態では、図6(B)に示すように、下段側のすべての電磁石3が電流値i0で励磁された場合、上段側のすべての電磁石3の電流値i0+iで励磁される。すなわち、下段側及び上段側で、電磁石3の励磁のための電流値の差がiとされる。このように、いわばバイアス電流iが上段側の電磁石3に付加されることにより、上記板バネ5の撓みをキャンセルする方向に(いま、重力方向をz軸方向の下方向としている。)、可動子1に並進推力を発生させることができる。電流値iは、板バネ5やその他の部材の設計に応じて予め設定することができる。これにより、可動子1の位置を初期位置に保つことができる。
また、板バネ5の撓みの許容範囲をできるだけ小さくする等の、板バネ5の厳格な設計を必要としない。
さらに、可動子1のxy軸周りでの回転時に板バネ5の撓みが抑えられることにより、可動子1の動きの制御時においてその撓みによる弾性力が外乱にならないので、小さいトルクにより可動子1を回転させることができる。
さらに、バイアス電流値を適宜制御することにより、可動子1は、z軸、xy軸での回転運動だけでなく、z軸に沿った方向での並進運動も可能となる。すなわち、意図的に可動子1が初期位置から離れるように可動子1が駆動されることにより、電磁アクチュエータ100の応用範囲を広げることができる。例えば、搬送用のロボットアームの関節装置に電磁アクチュエータ100が適用される場合、z軸方向での搬送対象物の位置の微調整等を行うことができる。
[その他の実施形態]
本発明に係る実施形態は、以上説明した実施形態に限定されず、他の種々の実施形態が実現される。
本発明に係る実施形態は、以上説明した実施形態に限定されず、他の種々の実施形態が実現される。
出力軸15、フレーム21、板バネ5、可動子1の第1及び第2の可動子部13及び14のそれぞれの形状、大きさ等は適宜変更可能である。例えば、板バネ5のスリットの形状、配置、個数等、適宜変更可能である。あるいは、1枚の板バネ5に代えて、長方形状の板バネが複数設けられていてもよい。電磁アクチュエータ100の、出力軸方向の厚さは厚くなるが、板バネ5に代えて、複数のコイルバネが設けられていてもよい。
例えば、センサを用いて可動子1のxy軸周りでの傾動角やz軸方向での並進移動の距離が検出される構成であってもよい。この場合、センサとして、例えば出力軸15等に設けられた光センサ等を利用することができる。
可動子1に並進推力を発生させる方法として、図6(B)に示した形態に限られない。例えば、z軸方向で見て回転角度位置にある、下段側及び上段側の電磁石3が、それぞれ異なる磁極を持つように励磁されるようにしてもよい。例えば図6(B)のA−A線断面で見る場合、上段側の2つの電磁石3がN極で、下段側の2つの電磁石3がS極になるように励磁される。このような方法によっても、可動子1の並進移動が可能となる。あるいは、このような方法と、図6(B)で示した電流値の制御による方法とを組合せてもよい。
電磁石3の個数や配置は、上記実施形態に限られず、適宜変更可能である。
x軸、y軸、またはこれらの合成軸の周りでの可動子1の回転、すなわち可動子1の傾動を支持する支持部材として、板バネ5に限られない。例えばそれはゴムでもよい。支持部材が板バネのような薄い部材でなく、z軸方向に厚さのある部材である場合、その厚さに応じて、外周側空間D2(図2参照)等の形状やサイズが適宜設計されればよい。
あるいは、支持部材は、設計者がその設計時に意図的に弾性力を持たせたような部材に限られず、その傾動動作を支持できる部材であって、その傾動に追従して変形(弾性変形)するような部材であれば何でもよい。
あるいは、支持部材は、設計者がその設計時に意図的に弾性力を持たせたような部材に限られず、その傾動動作を支持できる部材であって、その傾動に追従して変形(弾性変形)するような部材であれば何でもよい。
D…空間
1…可動子
2…固定子
3…電磁石
4…軸受ユニット
5…板バネ(支持部材に相当)
13…第1の可動子部
14…第2の可動子部
15…出力軸
100…電磁アクチュエータ
1…可動子
2…固定子
3…電磁石
4…軸受ユニット
5…板バネ(支持部材に相当)
13…第1の可動子部
14…第2の可動子部
15…出力軸
100…電磁アクチュエータ
Claims (2)
- 第1の可動子部と、第2の可動子部と、前記第1の可動子部及び前記第2の可動子部の間に空間を形成するように、前記第1及び前記第2の可動子部を同軸で連結する出力軸とを有する可動子と、
前記可動子の周囲に配置された第1の電磁石群と、前記可動子の周囲に配置され、前記出力軸に沿う方向で前記第1の電磁石群に対応するように配置された第2の電磁石群とを有し、前記第1及び前記第2の電磁石群が、前記可動子の外周面に対向する、該外周面に沿う形状の内周面をそれぞれ有し、前記第1及び前記第2の電磁石群を用いて、前記出力軸を回転中心とする第1のトルク、前記出力軸と直交する軸を回転中心とする第2のトルク及び前記出力軸に沿った方向での並進推力を、前記可動子に発生させる固定子と、
前記可動子の前記空間内に設けられ、前記第1のトルクによる前記可動子の回転を支持する軸受ユニットと、
前記可動子の前記空間を介して前記固定子と前記軸受ユニットとの間に接続され、前記第2のトルクによる前記可動子の回転を支持する支持部材と、
を具備する電磁アクチュエータ。 - 請求項1に記載の電磁アクチュエータであって、
前記支持部材は、前記出力軸に垂直な面内で配置された板バネである電磁アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011055326A JP2012191817A (ja) | 2011-03-14 | 2011-03-14 | 電磁アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011055326A JP2012191817A (ja) | 2011-03-14 | 2011-03-14 | 電磁アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012191817A true JP2012191817A (ja) | 2012-10-04 |
Family
ID=47084383
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011055326A Pending JP2012191817A (ja) | 2011-03-14 | 2011-03-14 | 電磁アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012191817A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162933A1 (ja) * | 2014-04-25 | 2015-10-29 | ミツミ電機株式会社 | アクチュエータ及びエアポンプ、理美容機器及びレーザー走査機器 |
| KR20160120465A (ko) * | 2015-04-08 | 2016-10-18 | 한국철도기술연구원 | 에너지 하비스터 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004194499A (ja) * | 2002-11-26 | 2004-07-08 | Matsushita Electric Works Ltd | アクチュエータ |
| JP2010207064A (ja) * | 2009-03-06 | 2010-09-16 | Sinfonia Technology Co Ltd | 電磁アクチュエータ及び関節装置 |
-
2011
- 2011-03-14 JP JP2011055326A patent/JP2012191817A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004194499A (ja) * | 2002-11-26 | 2004-07-08 | Matsushita Electric Works Ltd | アクチュエータ |
| JP2010207064A (ja) * | 2009-03-06 | 2010-09-16 | Sinfonia Technology Co Ltd | 電磁アクチュエータ及び関節装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162933A1 (ja) * | 2014-04-25 | 2015-10-29 | ミツミ電機株式会社 | アクチュエータ及びエアポンプ、理美容機器及びレーザー走査機器 |
| JP2015211552A (ja) * | 2014-04-25 | 2015-11-24 | ミツミ電機株式会社 | アクチュエータ及びエアポンプ、理美容機器及びレーザー走査機器 |
| CN106233594A (zh) * | 2014-04-25 | 2016-12-14 | 三美电机株式会社 | 致动器及气泵、理美容设备及激光扫描设备 |
| CN106233594B (zh) * | 2014-04-25 | 2019-05-17 | 三美电机株式会社 | 致动器及气泵、理美容设备及激光扫描设备 |
| US10615677B2 (en) | 2014-04-25 | 2020-04-07 | Mitsumi Electric Co., Ltd. | Actuator, air pump, beauty treatment device, and laser scanning device |
| KR20160120465A (ko) * | 2015-04-08 | 2016-10-18 | 한국철도기술연구원 | 에너지 하비스터 |
| KR101713668B1 (ko) * | 2015-04-08 | 2017-03-08 | 한국철도기술연구원 | 에너지 하비스터 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4920687B2 (ja) | 磁気浮上モータおよびポンプ | |
| JP5575802B2 (ja) | 一体式ステージ位置決めシステム及び方法 | |
| JP7076201B2 (ja) | 多自由度電磁機械及びその制御方法 | |
| WO2009128321A1 (ja) | 多自由度アクチュエータおよびステージ装置 | |
| JP4557245B2 (ja) | 人工心臓用のモータ装置 | |
| CN107659208B (zh) | 二维线性动铁式微角位移电磁作动装置及其作动方法 | |
| JP5488131B2 (ja) | 電磁アクチュエータ | |
| US20210234452A1 (en) | Multi-degree-of-freedom electromagnetic machine | |
| JPWO2007037380A1 (ja) | 磁界制御方法および磁界発生装置 | |
| JPWO2004042902A1 (ja) | スパイラル型リニアモータ | |
| JP4546894B2 (ja) | 触覚情報提示用アクチュエータ | |
| EP3270493B1 (en) | A multi-degree of freedom electromagnetic machine with input amplitude modulation control | |
| JP5439663B2 (ja) | 電磁アクチュエータ及び関節装置 | |
| US8344593B2 (en) | Vibration type driving apparatus | |
| US11108287B2 (en) | Spherical electromagnetic machine with two degrees of unconstrained rotational freedom | |
| JP2012191817A (ja) | 電磁アクチュエータ | |
| US8378542B2 (en) | Magnetic centre-finding device with no magnet on the rotor and with small air gap | |
| US20180115232A1 (en) | Actuator | |
| JP4821356B2 (ja) | 磁界制御方法および磁界発生装置 | |
| JP2016090778A (ja) | 振れ補正装置及び光学機器 | |
| JP6328948B2 (ja) | 2軸ステッパ装置 | |
| JP4651308B2 (ja) | リニアオシレータ | |
| JP5806089B2 (ja) | プレーナ型電磁アクチュエータ | |
| WO2016143262A1 (ja) | 発電装置 | |
| JP5656902B2 (ja) | アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150331 |