JP2012192759A - 検測車動揺補正方法及び装置、並びに検測方法及び装置 - Google Patents
検測車動揺補正方法及び装置、並びに検測方法及び装置 Download PDFInfo
- Publication number
- JP2012192759A JP2012192759A JP2011056272A JP2011056272A JP2012192759A JP 2012192759 A JP2012192759 A JP 2012192759A JP 2011056272 A JP2011056272 A JP 2011056272A JP 2011056272 A JP2011056272 A JP 2011056272A JP 2012192759 A JP2012192759 A JP 2012192759A
- Authority
- JP
- Japan
- Prior art keywords
- rail
- vehicle
- inspection
- state
- inspection vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
【課題】検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測できるようにする。
【解決手段】検測装置はレールに沿って走行する検測車両に搭載されており、車両の運行に関する周辺構造物の状態(サードレールの高さ)を測定する。検測車両には、検測車両の走行中に車両自体がレールに対して動揺する状態(車両のローリング及びヨーイング等)を測定する動揺状態測定手段が搭載されている。検測装置は、動揺状態測定手段によって測定された検測車両の動揺状態に基づいてその検測結果を補正する。これによって、検測装置は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
【選択図】 図2
【解決手段】検測装置はレールに沿って走行する検測車両に搭載されており、車両の運行に関する周辺構造物の状態(サードレールの高さ)を測定する。検測車両には、検測車両の走行中に車両自体がレールに対して動揺する状態(車両のローリング及びヨーイング等)を測定する動揺状態測定手段が搭載されている。検測装置は、動揺状態測定手段によって測定された検測車両の動揺状態に基づいてその検測結果を補正する。これによって、検測装置は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
【選択図】 図2
Description
本発明は、車両の運行に関する周辺構造物を測定する検測車の測定中におけるローリング及びヨーイング等の動揺を補正する検測車動揺補正方法及び装置に関する。
鉄道の安定輸送には車両の軌道、架線、電気供給用サードレール等のような車両の運行に関する周辺構造物である電車線路設備等の測定管理が必要である。電車線路設備のうち、主に地下鉄などで使用される電気供給用サードレールの測定には、サードレール測定装置を搭載した専用の検測車を用いているが、走行時に検測車の車輪フランジにより車体動揺(ローリング及びヨーイング等)が発生していた。サードレール測定装置を搭載した検測車としては、特許文献1に記載のようなものが知られている。
特許文献1に記載のサードレール測定装置は、第三軌条(電気供給用サードレール)と上側防護版との間の隙間を非接触で簡便且つ高精度に測定できると同時に、第三軌条(電気供給用サードレール)と背面側防護版との間の隙間も精度良く測定でき、非常に高能率的な第三軌条(電気供給用サードレール)測定装置である。しかしながら、走行時に検測車の車輪フランジから発生される車体動揺(ローリング及びヨーイング等)を考慮していなかったため、検測結果に車体動揺による測定誤差を含む恐れがあった。
本発明は、上述の点に鑑みなされたものであって、検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測を行うことのできる検測車動揺補正方法及び装置、並びに検測方法及び装置を提供することを目的とする。
本発明に係る検測車動揺補正方法の第1の特徴は、レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態を測定するステップと、走行中における前記検測車両の前記レールに対する動揺状態を測定するステップと、前記検測車両の動揺状態に基づいて前記状態測定手段によって測定された検測結果を補正するステップとを備えたことにある。この発明は、検測車両の動揺状態を測定し、それに基づいて検測結果を補正するようにしたものである。これによって、本発明は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
本発明に係る検測車動揺補正方法の第2の特徴は、前記第1の特徴に記載の検測車動揺補正方法において、前記周辺構造物の状態として、前記レールに沿って設けられたサードレールの高さを測定することにある。これは、地下鉄などで使用されるサードレールの高さを測定する検測車に適用して、正確な検測を行うようにしたものである。
本発明に係る検測車動揺補正方法の第3の特徴は、前記第1又は第2の特徴に記載の検測車動揺補正方法において、前記レールに対する動揺状態として、前記検測車両の前記レールに沿った方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のヨーイングを測定すると共に前記検測車両の前記レールに沿った方向に対して略垂直方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のローリングを測定することにある。これは、走行レールを検出するセンサをレールに沿った方向及びその略垂直方向にそれぞれ設置することによって、検測車両の動揺(ローリング及びヨーイング等)を静的(停止状態と同等)に測定するようにしたものである。
本発明に係る検測車動揺補正装置の第1の特徴は、レールに沿って走行する検測車両に搭載され、車両の運行に関する周辺構造物の状態を測定する検測状態測定手段と、走行中における前記検測車両の前記レールに対する動揺状態を測定する動揺状態測定手段と、前記動揺状態測定手段によって測定された前記検測車両の動揺状態に基づいて前記状態測定手段によって測定された検測結果を補正する補正手段とを備えたことにある。これは、前記検測車動揺補正方法の第1の特徴に対応した検測車動揺補正装置の発明である。
本発明に係る検測車動揺補正装置の第2の特徴は、前記第1の特徴に記載の検測車動揺補正装置において、前記検測状態測定手段が前記周辺構造物の状態として前記レールに沿って設けられたサードレールの高さを測定することにある。これは、前記検測車動揺補正方法の第2の特徴に対応した検測車動揺補正装置の発明である。
本発明に係る検測車動揺補正装置の第3の特徴は、前記第1又は第2の特徴に記載の検測車動揺補正装置において、前記動揺測定手段が、前記検測車両の前記レールに沿った方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のヨーイングを前記レールに対する動揺状態として測定するヨーイング測定手段と、前記検測車両の前記レールに沿った方向に対して略垂直方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のローリングを前記レールに対する動揺状態として測定するローリング測定手段とを備えたことにある。これは、前記検測車動揺補正方法の第3の特徴に対応した検測車動揺補正装置の発明である。
本発明に係る検測方法の特徴は、前記第1、第2又は第3の特徴に記載の検測車動揺補正方法を用いて、レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態の測定結果を補正することにある。これは、前記第1、第2又は第3の特徴に記載の検測車動揺補正方法を用いた検測方法の発明である。
本発明に係る検測装置の特徴は、前記第1、第2又は第3の特徴に記載の検測車動揺補正装置を用いて、レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態の測定結果を補正することにある。これは、前記第1、第2又は第3の特徴に記載の検測車動揺補正装置を用いた検測装置の発明である。この発明において、検測装置とは検測車に搭載される検測装置及びこの検測装置を搭載した検測車を含む概念である。
本発明によれば、検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測を行うことができるという効果がある。
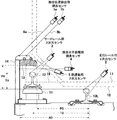
図1は、本発明に係る検測車動揺補正方法の適用された検測装置を搭載した検測車の概略構成を示す図である。図1は2本の走行レールのうち片方側(図では左側の走行レール10L)のみを示している。従って、同様のものが他方の右側レールにも設けられているが図1ではその図示は省略してある。図1に示すように、車両が走行する方向(走行レール10Lの敷設方向)に沿って数m間隔に設置されている枕木上の碍子11上に電気供給用サードレール12が設けられている。電気供給用サードレール12は、その上側に設けられた防護板13によって保護されている。防護板13はL字形の腕金14によってボルトで固定されている。腕金14は碍子11と同様に、車両が走行する方向(走行レール10Lの敷設方向)に沿って数m間隔で設置されている。L字形の腕金14は、図1に示すように短軸方向が地面と平行となり、長軸方向が地面と垂直となるように設置されいる。防護板13は、地面と平行なL字形の短軸と地面との間であって、電気供給用サードレール12の敷設方向に沿って電気供給用サードレール12を保護するように設けられている。図1では電気供給用サードレール12についても、片側面(図では左側)のみを示しているが、軌道上の分岐部等の構造物によってはサイドレールがレールの右側に設置されている場合がある。
図1において、検測装置は、腕金位置検出用測長センサ1a,1b、走行レール用2次元センサ2、サードレール用2次元センサ3、腕金水平距離用測長センサ4、防護板用2次元センサ5、及び制御部1から構成されている。図では、前述と同様に、レールの片側面の検測装置が示してあるが、実際には右側にも同様の構成の検測装置が設けられている。腕金位置検出用測長センサ1a,1bは、L字形の腕金14の上面位置がターゲットとなるように腕金14の斜め上方からレーザ光を照射し、その反射光を受光するようになっている。図では、腕金14の幅に沿って2個の腕金位置検出用測長センサ1a,1bを設けているが、1個でもよい。
走行レール用2次元センサ2は、電気供給用サードレール12等の高さ及び水平距離の基準となる走行レール10Lの位置を検出するものである。走行レール用2次元センサの構成については公知なのでその詳細は省略する。サードレール用2次元センサ3は、走行レール10Lの頭頂面からの高さを電気供給用サードレール12の高さTHとして検出すると共に走行レール10Lの内側端面から電気供給用サードレール12中央までの距離を水平距離TDとして検出するものである。腕金水平距離用測長センサ4は、走行レール10Lの内側端面からL字形の腕金14の内側端面までの距離を腕金水平距離ADとして検出するものである。防護板用2次元センサ5は、走行レール10Lの頭頂面から防護板13の下面までの高さを防護板13の高さPHとし、走行レール10Lの内側端面から防護板13の内側(走行レール10L側)端面までの距離を水平距離PDとして検出するものである。腕金位置検出用測長センサ1a,1bは、レーザ光を用いて腕金14を検出するものである。上述のサードレール用2次元センサ3、腕金水平距離用測長センサ4及び防護板用2次元センサ5がそれぞれ計測するポイントは、腕金位置検出用測長センサ1a,1bによって腕金14を検出した箇所にて各測定値を算出している。図1において、一点鎖線17は図示していない検測車の車両限界を示し、二点鎖線18は建築限界を示し、点線19はコレクターシュー限界をそれぞれ示す。
図2は、図1の検測装置を搭載した検測車の概略を上側から見て示す図である。検測車20は、平行する2本の走行レール10L,10R上を2つの車軸21,22の両端に設けられた4つの車輪21R,21L,22R,22Lを介して走行する。図2では、サードレール用の各センサ(腕金位置検出用測長センサ1a,1b、サードレール用2次元センサ3、腕金水平距離用測長センサ4及び防護板用2次元センサ5)を搭載した検出構造物20L,20R、検測車20及び電気供給用サードレール12をそれぞれ点線で示してある。検測車20のフレーム枠23Lには走行レール10L側に3台の変位センサ2a,2b,2cが、フレーム枠23Rには走行レール10R側に1台の変位センサ2dがそれぞれ配置されている。検測装置の制御部1は、検測車20内に配置されている。
変位センサ2a,2b,2cは、それぞれ走行レール10L,10Rと平行で、且つそれぞれ均等の間隔で、同一直線上に配置されている。これは、検測車20が走行レール10L,10Rと平行な状態を保てず、走行レール10L,10Rに対してある角度をもって傾斜してしまうヨーイングの影響を測定するためである。変位センサ2dは、変位センサ2bと枕木方向(走行レールと直角方向)の同一線上の位置に配置されている。これは、変位センサ2b,2dで検測車20のサードレールとは反対側の車輪が浮き上がるローリングの影響を測定するためである。変位センサ2a〜2dは、それぞれ二次元の変位センサである。
走行レール10L,10Rと平行するサードレール用の各センサを搭載した検出構造物20L,20R内のサードレール用2次元センサ3の中心は、変位センサ2b,2dの中心と同一線上になるように検測車20の左右に配置されている。電気供給用サードレール12は走行レール10L,10Rの構造物(分岐器等)によって検測車20の左右のどちら側にも存在するために、検測車20の両側に検出構造物20L,20Rは取り付けられてある。なお、車体動揺に関しては、電気供給用サードレール12の左右位置とは無関係であり、影響が無いため、左右どちらに設置してあっても構わない。また、検測車20の両側にそれぞれ変位センサを3台ずつ配置することも可能である。また、変位センサ2b,2dの取り付け位置は、車軸の内側、外側どちらでも配置可能である。なお、この実施の形態では、変位センサ2a〜2dが二次元の変位センサである場合を説明したが、三次元の変位センサを使用することもできる。また、三次元の変位センサで計測される2値を使用するようにしてもよい。
図3は、本発明の一実施の形態に係る車体の動揺を検出する変位センサの配置例を示す図である。図では、変位センサ2a〜2dと走行レール10L,10Rのみを示す。変位センサ2a〜2dは、平行する2本の走行レール10L,10R上であって、走行レール10L,10Rの内側の検測車20上に搭載され、走行レール10L,10Rの踏頂面と車輪フランジが接するレール位置とが検出できるように、傾斜をつけて搭載されている。
図4は、車体の動揺で発生するローリングの概略とその角度算出法を示す図である。ローリングとは、図4(A)に示すように、検測車20が走行レール10L,10Rに接した面に対し、その重心位置が高いため、旋回するとその遠心力によって、検測車20が外側に傾斜することである。図4(A)では、検測車20が走行レール10Lの外側に角度θ1だけ傾斜している状態が示されている。この傾斜に連動して変位センサ2b,2dの位置も図4(A)のようになる。図4(B)は、変位センサ2bで得られるプロファイルと変位センサ2dで得られたプロファイルを示す。制御部1は、これらのプロファイルに基づいて、検測車20のローリング角θ1を算出する。まず、変位センサ2bのプロファイルにおいて、走行レール10L側のレール上面部における最高値4bを求める。同様に、変位センサ2dのプロファイルにおいて、走行レール10R側のレール上面部における最高値4dを求める。
図5は、ローリング角θ1を算出する方法の概念を示す図である。変位センサ2b,2dのプロファイルによって求められた走行レール10Lの最高値4bと、走行レール10Rの最高値4dとの位置関係は、図5(A)に示すような三角関数の関係にある。図5(A)において、走行レール10Lとその最高値4bとは同じ位置にあり、ローリングを無視した走行レール10Rの位置は、変位センサ2bのプロファイルの平行線上にある。また、走行レール10L,10R間(レール軌間長)は変位センサ2b、2dのレール側面から求めることができる。また、変位センサ2bのプロファイルに基づいて走行レール10L側のレール上面部の最高値4bと変位センサ2dのプロファイルに基づいて走行レール10R側のレール上面部の最高値が求められているので、ローリング角θ1は、式(1)によって求めることができる。すなわち、ローリング角θ1は、arctan(4b−4d)にて求めることができる。なお、図5(B)は、図4(B)の変位センサ2dのプロファイルを左右反転させ、点線で示す図4(B)の変位センサ2bのプロファイルと合成したものである。図5(B)に示すような合成プロファイルの座標から走行レール10L,10Rのレール上面の成す角度θ1を求めることによって、ローリング角θ1を算出してもよい。
図6は、車体の動揺で発生するヨーイングの概略とその角度算出法を示す図である。ヨーイングとは、図6(A)に示すように、検測車20が走行レール10L,10R上の直線部分を走行するときに、検測車20の車軸が鉛直軸まわりの回転振動を起こす現象のことである。図6(A)では、検測車20が走行レール10L,10Rの直線部分に対して角度θ2だけ反時計方向に回転している状態が示されている。この回転に連動して変位センサ2a,2cの位置も図6(A)のようになる。図6(B)は、変位センサ2aで得られるプロファイルと変位センサ2cで得られたプロファイルを示す。制御部1は、これらのプロファイルに基づいて、検測車20のヨーイング角θ2を算出する。まず、変位センサ2bのプロファイルにおいて、走行レール10L内側のレール側面からフランジまでの距離が最短となる最短部4aを求める。同様に、変位センサ2cのプロファイルにおいて、走行レール10L内側のレール側面からフランジまでの距離が最短となる最短部4cを求める。
図7は、ヨーイング角θ2を算出する方法の概念を示す図である。変位センサ2a,2cのプロファイルによって求められた走行レール10L内側のレール側面からフランジまでの最短部4a,4cとの位置関係は、図7(A)に示すような三角関数の関係になっている。図7(A)において、走行レール10Lとその最短部4aとが同じ位置にあると仮定した場合における走行レール10Lの位置は、変位センサ2aのプロファイルの平行線上となる。また、変位センサ2a,2cとの間の距離(センサ間長)は固定値である。また、変位センサ2aのプロファイルに基づいた走行レール10L内側のレール側面部における最短部4a,4cは、レール側面からフランジまでの最短距離をそれぞれ示しているので、ローリング角θ2は、式(2)によって求めることができる。すなわち、ローリング角θ2は、arctan(4c−4a)にて求めることができる。なお、図7(B)は、図6(B)の変位センサ2cのプロファイルと、点線で示す図6(B)の変位センサ2aのプロファイルとを合成したものである。図7(B)に示すような合成プロファイルの座標から走行レール10Lのレール側面の成す角度θ2を求めることによって、ヨーイング角θ2を算出してもよい。
制御部1は、上述のようにして算出したローリング角θ1及びヨーイング角θ2を補正率とし、この補正率をそれぞれの測定データに演算処理することにより、車体動揺(ローリング及びヨーイング等)を除去した静的(停止状態と同等)な測定を行うことができる。
上述の実施の形態では、車両の運行に関する周辺構造物の状態として電気供給用サードレール12の高さTHを測定する場合について説明したが、走行レール10Lの内側端面から電気供給用サードレール12中央までの距離(水平距離TD)、走行レール10Lの内側端面からL字形の腕金14の内側端面までの距離(腕金水平距離AD)、走行レール10Lの頭頂面から防護板13の下面までの高さPH、走行レール10Lの内側端面から防護板13の内側(走行レール10L側)端面までの距離(水平距離PD)を測定する場合にも応用できる。
1…制御部、
10L,10R…走行レール、
11…碍子、
12…電気供給用サードレール、
13…防護板、
14…腕金、
17…車両限界、
18…建築限界、
19…コレクターシュー限界
1a,1b…腕金位置検出用測長センサ、
2…走行レール用2次元センサ
20…検測車、
20L,20R…検出構造物、
21,22…車軸、
21R,21L,22R,22L…車輪、
23L,23R…フレーム枠、
2a,2b,2c,2d…変位センサ、
3…サードレール用2次元センサ、
4…腕金水平距離用測長センサ、
4a,4c…最短部、
4b,4d…最高値、
5…防護板用2次元センサ
10L,10R…走行レール、
11…碍子、
12…電気供給用サードレール、
13…防護板、
14…腕金、
17…車両限界、
18…建築限界、
19…コレクターシュー限界
1a,1b…腕金位置検出用測長センサ、
2…走行レール用2次元センサ
20…検測車、
20L,20R…検出構造物、
21,22…車軸、
21R,21L,22R,22L…車輪、
23L,23R…フレーム枠、
2a,2b,2c,2d…変位センサ、
3…サードレール用2次元センサ、
4…腕金水平距離用測長センサ、
4a,4c…最短部、
4b,4d…最高値、
5…防護板用2次元センサ
Claims (8)
- レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態を測定するステップと、
走行中における前記検測車両の前記レールに対する動揺状態を測定するステップと、
前記検測車両の動揺状態に基づいて前記状態測定手段によって測定された検測結果を補正するステップと
を備えたことを特徴とする検測車動揺補正方法。 - 請求項1に記載の検測車動揺補正方法において、前記周辺構造物の状態として、前記レールに沿って設けられたサードレールの高さを測定することを特徴とする検測車動揺補正方法。
- 請求項1又は2に記載の検測車動揺補正方法において、前記レールに対する動揺状態として、前記検測車両の前記レールに沿った方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のヨーイングを測定すると共に前記検測車両の前記レールに沿った方向に対して略垂直方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のローリングを測定することを特徴とする検測車動揺補正方法。
- レールに沿って走行する検測車両に搭載され、車両の運行に関する周辺構造物の状態を測定する検測状態測定手段と、
走行中における前記検測車両の前記レールに対する動揺状態を測定する動揺状態測定手段と、
前記動揺状態測定手段によって測定された前記検測車両の動揺状態に基づいて前記状態測定手段によって測定された検測結果を補正する補正手段と
を備えたことを特徴とする検測車動揺補正装置。 - 請求項4に記載の検測車動揺補正装置において、前記検測状態測定手段が前記周辺構造物の状態として前記レールに沿って設けられたサードレールの高さを測定することを特徴とする検測車動揺補正装置。
- 請求項4又は5に記載の検測車動揺補正装置において、前記動揺測定手段が、前記検測車両の前記レールに沿った方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のヨーイングを前記レールに対する動揺状態として測定するヨーイング測定手段と、前記検測車両の前記レールに沿った方向に対して略垂直方向の離間した位置に設けられた少なくとも2個の2次元センサによって検出された前記レールのプロファイルに基づいて前記検測車両のローリングを前記レールに対する動揺状態として測定するローリング測定手段とを備えたことを特徴とする検測車動揺補正装置。
- 請求項1、2又は3に記載の検測車動揺補正方法を用いて、レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態の測定結果を補正することを特徴とする検測方法。
- 請求項4、5又は6に記載の検測車動揺補正装置を用いて、レールに沿って走行する検測車両に搭載された状態測定手段を用いて車両の運行に関する周辺構造物の状態の測定結果を補正することを特徴とする検測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056272A JP2012192759A (ja) | 2011-03-15 | 2011-03-15 | 検測車動揺補正方法及び装置、並びに検測方法及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056272A JP2012192759A (ja) | 2011-03-15 | 2011-03-15 | 検測車動揺補正方法及び装置、並びに検測方法及び装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012192759A true JP2012192759A (ja) | 2012-10-11 |
Family
ID=47085105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011056272A Pending JP2012192759A (ja) | 2011-03-15 | 2011-03-15 | 検測車動揺補正方法及び装置、並びに検測方法及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012192759A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013199156A (ja) * | 2012-03-23 | 2013-10-03 | Railway Technical Research Institute | 台車姿勢検出方法 |
| WO2014115902A1 (ja) | 2013-02-19 | 2014-07-31 | 株式会社 明電舎 | 摩耗測定装置及びその方法 |
| CN108362250A (zh) * | 2018-03-21 | 2018-08-03 | 江西日月明测控科技股份有限公司 | 地铁第三轨测量机械臂 |
| WO2018164213A1 (ja) * | 2017-03-08 | 2018-09-13 | 株式会社 明電舎 | サードレール測定方法及び装置 |
| JP2020132094A (ja) * | 2019-02-25 | 2020-08-31 | 公益財団法人鉄道総合技術研究所 | 車体動揺補正装置および車体動揺補正方法、ならびにプログラム |
| US12269519B2 (en) | 2018-07-06 | 2025-04-08 | Aktiebolaget Skf | Monitoring system for monitoring a condition of an electric rail system and/or of a current collector of the rail system |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05141947A (ja) * | 1991-11-21 | 1993-06-08 | Mitsubishi Electric Corp | 超音波式軌条寸法計測装置 |
| JPH1062164A (ja) * | 1996-08-22 | 1998-03-06 | Central Japan Railway Co | 隣接2軌道の離隔距離測定検査方法 |
| JP2010133845A (ja) * | 2008-12-05 | 2010-06-17 | Honda Motor Co Ltd | 車高測定装置 |
-
2011
- 2011-03-15 JP JP2011056272A patent/JP2012192759A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05141947A (ja) * | 1991-11-21 | 1993-06-08 | Mitsubishi Electric Corp | 超音波式軌条寸法計測装置 |
| JPH1062164A (ja) * | 1996-08-22 | 1998-03-06 | Central Japan Railway Co | 隣接2軌道の離隔距離測定検査方法 |
| JP2010133845A (ja) * | 2008-12-05 | 2010-06-17 | Honda Motor Co Ltd | 車高測定装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013199156A (ja) * | 2012-03-23 | 2013-10-03 | Railway Technical Research Institute | 台車姿勢検出方法 |
| WO2014115902A1 (ja) | 2013-02-19 | 2014-07-31 | 株式会社 明電舎 | 摩耗測定装置及びその方法 |
| WO2018164213A1 (ja) * | 2017-03-08 | 2018-09-13 | 株式会社 明電舎 | サードレール測定方法及び装置 |
| JP2018146509A (ja) * | 2017-03-08 | 2018-09-20 | 株式会社明電舎 | サードレール測定方法及び装置 |
| CN108362250A (zh) * | 2018-03-21 | 2018-08-03 | 江西日月明测控科技股份有限公司 | 地铁第三轨测量机械臂 |
| CN108362250B (zh) * | 2018-03-21 | 2023-10-27 | 江西日月明测控科技股份有限公司 | 地铁第三轨测量机械臂 |
| US12269519B2 (en) | 2018-07-06 | 2025-04-08 | Aktiebolaget Skf | Monitoring system for monitoring a condition of an electric rail system and/or of a current collector of the rail system |
| JP2020132094A (ja) * | 2019-02-25 | 2020-08-31 | 公益財団法人鉄道総合技術研究所 | 車体動揺補正装置および車体動揺補正方法、ならびにプログラム |
| JP7026651B2 (ja) | 2019-02-25 | 2022-02-28 | 公益財団法人鉄道総合技術研究所 | 車体動揺補正装置および車体動揺補正方法、ならびにプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5453130B2 (ja) | アタック角測定装置及び測定方法 | |
| JP2012192759A (ja) | 検測車動揺補正方法及び装置、並びに検測方法及び装置 | |
| JP2014240262A (ja) | 軌道検測装置 | |
| JP6096424B2 (ja) | 軌道状態監視装置 | |
| KR101840729B1 (ko) | 회전경사계와 레일전류 차단장치를 구비한 트롤리형 궤도검측장비 | |
| CN110249095B (zh) | 非接触地检测轨道几何形状的方法 | |
| JP4692517B2 (ja) | 鉄道車両用脱線防止ガードの敷設位置診断方法 | |
| US11802380B2 (en) | Track maintenance machine having a track position measuring system | |
| CN104890699A (zh) | 一种轨道检测仪 | |
| CN104859681A (zh) | 一种用于轨道几何参数测量的快速精调轨道检查仪 | |
| CN106537084A (zh) | 轨道位置测量装置 | |
| CN104775342A (zh) | 轨道几何状态快速测量仪 | |
| JP5498633B2 (ja) | 検測方法及び装置 | |
| JP6027480B2 (ja) | 軌道検測方法及び装置 | |
| WO2018205979A1 (zh) | 轨道车及隧道检测车 | |
| JP2009018635A (ja) | 軌道検測装置 | |
| KR101480808B1 (ko) | 레이저건과 모눈 반사판을 이용한 궤도 고저측정 장치 및 그 방법 | |
| JP4919331B2 (ja) | 剛体電車線凹凸測定装置 | |
| JP5931535B2 (ja) | 検測車動揺状態補正方法及び装置、並びに検測方法及び装置 | |
| CN110462335B (zh) | 第三轨测量方法及装置 | |
| JP3868337B2 (ja) | レール上台車の走行軌跡検出方法及び装置 | |
| JP5749496B2 (ja) | 鉄道車両アタック角測定装置および方法 | |
| JP6644598B2 (ja) | 鉄道車両の車輪とレールとのアタック角測定方法及び装置 | |
| CN207274715U (zh) | 轨道几何参数检测车 | |
| JP2013241113A (ja) | 検測車動揺補正方法及び検測車動揺補正装置、並びに検測方法及び検測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130902 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141202 |