JP2012193792A - 摩擦ローラ式減速機及び電気自動車用駆動装置 - Google Patents
摩擦ローラ式減速機及び電気自動車用駆動装置 Download PDFInfo
- Publication number
- JP2012193792A JP2012193792A JP2011057866A JP2011057866A JP2012193792A JP 2012193792 A JP2012193792 A JP 2012193792A JP 2011057866 A JP2011057866 A JP 2011057866A JP 2011057866 A JP2011057866 A JP 2011057866A JP 2012193792 A JP2012193792 A JP 2012193792A
- Authority
- JP
- Japan
- Prior art keywords
- roller
- sun roller
- sun
- input shaft
- cam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


















Landscapes
- Friction Gearing (AREA)
Abstract
【課題】効率が良く、ストローク確保も容易で、しかも、耐久性を十分に確保し易い構造を実現する。
【解決手段】1対ずつの太陽ローラ素子8c、8cとカム板15a、15aとにより、1対のローディングカム装置7a、7aを構成する。そして、これら両ローディングカム装置7a、7aが発生する、軸方向の押圧力により、各ローラの周面同士の転がり接触部である、各トラクション部の面圧を確保する。前記両太陽ローラ素子8c、8c同士を、板ばね30、30等の弾性部材により互いに近付く方向に押圧して、入力軸にトルクが入力されない状態でも、前記各トラクション部の面圧を確保する為の予圧を付与する。
【選択図】図3
【解決手段】1対ずつの太陽ローラ素子8c、8cとカム板15a、15aとにより、1対のローディングカム装置7a、7aを構成する。そして、これら両ローディングカム装置7a、7aが発生する、軸方向の押圧力により、各ローラの周面同士の転がり接触部である、各トラクション部の面圧を確保する。前記両太陽ローラ素子8c、8c同士を、板ばね30、30等の弾性部材により互いに近付く方向に押圧して、入力軸にトルクが入力されない状態でも、前記各トラクション部の面圧を確保する為の予圧を付与する。
【選択図】図3
Description
この発明は、例えば電気自動車の駆動系に組み込んだ状態で、電動モータから駆動輪にトルクを伝達する、摩擦ローラ式減速機の改良に関する。
近年普及し始めている電気自動車の利便性を向上させるべく、充電1回当りの走行可能距離を長くする為に、電動モータの効率を向上させる事が重要である。この効率を向上させるには、高速回転する小型の電動モータを使用し、この電動モータの出力軸の回転を減速してから駆動輪に伝達する事が効果がある。この場合に使用する減速機のうち、少なくとも前記電動モータの出力軸に直接繋がる第一段目の減速機は、運転速度が非常に速くなるので、運転時の振動及び騒音を抑える為に、摩擦ローラ式減速機を使用する事が考えられる。この様な場合に使用可能な摩擦ローラ式減速機として、例えば特許文献1〜3に記載されたものが知られている。このうちの特許文献3に記載された従来構造に就いて、図18〜20により説明する。
この摩擦ローラ式減速機1は、入力軸2と、出力軸3と、太陽ローラ4と、環状ローラ5と、それぞれが中間ローラである複数個の遊星ローラ6、6と、ローディングカム装置7とを備える。
このうちの太陽ローラ4は、軸方向に分割された1対の太陽ローラ素子8a、8bを前記入力軸2の周囲に、互いの先端面同士の間に隙間を介在させた状態で互いに同心に、且つ、このうちの太陽ローラ素子8aを、前記入力軸2に対する相対回転を可能に配置して成る。前記両太陽ローラ素子8a、8bの外周面は、それぞれの先端面に向かうに従って外径が小さくなる方向に傾斜した傾斜面であって、これら両傾斜面を転がり接触面としている。従ってこの転がり接触面の外径は、軸方向中間部で小さく、両端部に向かうに従って大きくなる。
このうちの太陽ローラ4は、軸方向に分割された1対の太陽ローラ素子8a、8bを前記入力軸2の周囲に、互いの先端面同士の間に隙間を介在させた状態で互いに同心に、且つ、このうちの太陽ローラ素子8aを、前記入力軸2に対する相対回転を可能に配置して成る。前記両太陽ローラ素子8a、8bの外周面は、それぞれの先端面に向かうに従って外径が小さくなる方向に傾斜した傾斜面であって、これら両傾斜面を転がり接触面としている。従ってこの転がり接触面の外径は、軸方向中間部で小さく、両端部に向かうに従って大きくなる。
又、前記環状ローラ5は、全体を円環状としたもので、前記太陽ローラ4の周囲にこの太陽ローラ4と同心に配置した状態で、図示しないハウジング等の固定の部分に支持固定している。又、前記環状ローラ5の内周面は、軸方向中央部に向かうに従って内径が大きくなる方向に傾斜した転がり接触面としている。
又、前記各遊星ローラ6、6は、前記太陽ローラ4の外周面と前記環状ローラ5の内周面との間の環状空間9の円周方向複数箇所に配置している。前記各遊星ローラ6、6は、それぞれが前記入力軸2及び前記出力軸3と平行に配置された、自転軸である遊星軸10、10の周囲に、ラジアルニードル軸受を介して、回転自在に支持している。これら各遊星軸10、10の基端部は、前記出力軸3の基端部に結合固定されたキャリア11に、支持固定されている。前記各遊星ローラ6、6の外周面は、母線形状が部分円弧状の凸曲面で、それぞれ前記太陽ローラ4の外周面と前記環状ローラ5の内周面とに転がり接触している。
又、前記各遊星ローラ6、6は、前記太陽ローラ4の外周面と前記環状ローラ5の内周面との間の環状空間9の円周方向複数箇所に配置している。前記各遊星ローラ6、6は、それぞれが前記入力軸2及び前記出力軸3と平行に配置された、自転軸である遊星軸10、10の周囲に、ラジアルニードル軸受を介して、回転自在に支持している。これら各遊星軸10、10の基端部は、前記出力軸3の基端部に結合固定されたキャリア11に、支持固定されている。前記各遊星ローラ6、6の外周面は、母線形状が部分円弧状の凸曲面で、それぞれ前記太陽ローラ4の外周面と前記環状ローラ5の内周面とに転がり接触している。
更に、前記ローディングカム装置7は、一方の太陽ローラ素子8aと、前記入力軸2との間に設けている。この為に、この入力軸2の中間部に、止め輪12により支え環13を係止し、この支え環13と前記一方の太陽ローラ素子8aとの間に、この支え環13の側から順番に、皿ばね14と、カム板15と、それぞれが転動体である複数個の玉16、16とを設けている。そして、互いに対向する、前記一方の太陽ローラ素子8aの基端面と前記カム板15の片側面との、それぞれ円周方向複数箇所ずつに、被駆動側カム面17、17と駆動側カム面18、18とを設けている。これら各カム面17、18はそれぞれ、軸方向に関する深さが円周方向に関して中央部で最も深く、同じく両端部に向かうに従って漸次浅くなる形状を有する。
この様なローディングカム装置7は、前記入力軸2が停止している状態では、前記各玉16、16が、図20の(A)に示す様に、前記各カム面17、18の最も深くなった部分に位置する。この状態では、前記皿ばね14の弾力により、前記一方の太陽ローラ素子8aを前記他方の太陽ローラ素子8bに向け押圧する。これに対して、前記入力軸2が回転すると、前記各玉16、16が、図20の(B)に示す様に、前記各カム面17、18の浅くなった部分に移動する。そして、前記一方の太陽ローラ素子8aと前記カム板15との間隔を拡げ、前記一方の太陽ローラ素子8aを前記他方の太陽ローラ素子8bに向け押圧する。この結果、この一方の太陽ローラ素子8aは前記他方の太陽ローラ素子8bに向け、前記皿ばね14の弾力と、前記各カム面17、18に対して前記各玉16、16が乗り上げる事により発生する推力とのうちの、大きな方の力で押圧されつつ回転駆動される。
上述の様な摩擦ローラ式減速機1の運転時には、前記ローディングカム装置7が発生する軸方向の推力により、前記両太陽ローラ素子8a、8bの間隔が縮まる。そして、これら両太陽ローラ素子8a、8bにより構成される前記太陽ローラ4の外周面と、前記各遊星ローラ6、6の外周面との転がり接触部の面圧が上昇する。この面圧上昇に伴ってこれら各遊星ローラ6、6が、前記太陽ローラ4及び前記環状ローラ5の径方向に関して外方に押される。すると、この環状ローラ5の内周面と前記各遊星ローラ6、6の外周面との転がり接触部の面圧も上昇する。この結果、前記入力軸2と前記出力軸3との間に存在する、動力伝達に供されるべき、それぞれがトラクション部である複数の転がり接触部の面圧が、これら両軸2、3同士の間で伝達すべきトルクの大きさに応じて上昇する。
この状態で前記入力軸2を回転させると、この回転が、前記太陽ローラ4から前記各遊星ローラ6、6に伝わり、これら各遊星ローラ6、6がこの太陽ローラ4の周囲で、自転しつつ公転する。これら各遊星ローラ6、6の公転運動は、前記キャリア11を介して前記出力軸3により取り出せる。前記各トラクション部の面圧は、前記両軸2、3同士の間で伝達すべきトルクの大きさに応じた適正なものとなり、前記各トラクション部で過大な滑りが発生したり、或いは、これら各トラクション部の面圧が過大になる事に伴う転がり抵抗が徒に増大する事を防止できる。
上述の様な従来の摩擦ローラ式減速機1は、次の(1)(2)の点で改良の余地がある。
(1) ローディングカム装置7の効率が必ずしも良くない。具体的には、押圧力の確保とストロークの確保とを両立させる面から不利である。
(2) 耐久性確保が難しく、長期間に亙って安定した性能を維持しにくい。具体的には、前記皿ばね14がへたり易く、へたった場合には、前記摩擦ローラ式減速機1の起動時に、前記各トラクション部で過大な滑りが発生する。
これら(1)(2)の様な問題が発生する理由に就いて、以下に説明する。
(1) ローディングカム装置7の効率が必ずしも良くない。具体的には、押圧力の確保とストロークの確保とを両立させる面から不利である。
(2) 耐久性確保が難しく、長期間に亙って安定した性能を維持しにくい。具体的には、前記皿ばね14がへたり易く、へたった場合には、前記摩擦ローラ式減速機1の起動時に、前記各トラクション部で過大な滑りが発生する。
これら(1)(2)の様な問題が発生する理由に就いて、以下に説明する。
前記従来構造のローディングカム装置7は、前記各カム面17、18と前記各玉16、16との係合に基づくカム式推力発生機構と、予圧付与の為の前記皿ばね14とを、押圧力の作用方向に関して互いに直列に配置している。そして、前記摩擦ローラ式減速機1が停止した状態では、前記皿ばね14の弾力(以下「ばね押圧力」とする)に基づいて、前記各トラクション部に、必要最低限を上回る程度の面圧を付与する。この状態から前記摩擦ローラ式減速機1が起動すると、前記各玉16、16が前記各カム面17、18の浅い側に向けて移動し(乗り上げ)、前記カム式推力発生機構部分で発生する押圧力(以下「カム部押圧力」とする)が上昇する。このカム部押圧力の上昇に伴って前記皿ばね14が、軸方向寸法が縮む方向に弾性変形するので、この皿ばね14が完全に押し潰されるまでの間は、前記ばね押圧力のみで、前記一方の太陽ローラ素子8aを前記他方の太陽ローラ素子8bに向け押圧する。従って、前記皿ばね14が完全に押し潰されるまでの間は、前記ローディングカム装置7全体としての押圧力(以下「総合押圧力」とする)は、前記皿ばね14の弾力に見合う大きさになる。そして、この皿ばね14が完全に押し潰されてから、更に前記カム式推力発生機構部分で発生する押圧力が上昇すると、前記総合押圧力は、前記カム部押圧力となる。
結局、このローディングカム装置7全体としての押圧力の大きさは、前記ばね押圧力と前記カム部押圧力とのうちの大きい方の値になる。このカム部押圧力が大きくなった状態で、前記皿ばね14の弾力が、ローディングカム装置7全体としての押圧力を大きくする事には寄与しない。従って、前記入力軸2に加えられるトルクが大きくなった状態では、前記カム部押圧力のみで、前記各トラクション部の面圧を確保する必要がある。このカム部押圧力は、前記各カム面17、18の円周方向に関する傾斜角度を緩くすれば確保できるが、その分、前記一方の太陽ローラ素子8aを前記他方の太陽ローラ素子8bに向けて移動させるストロークを確保する面からは不利になる。図18に示した従来構造の場合、前記カム部押圧力が増大しつつ前記皿ばね14を押し潰す過程で、前記カム板15が前記他方の太陽ローラ素子8bから離れる方向に変位する。この為、元々前記ストローク確保の面から不利である。このストロークを十分に確保できないと、前記各トラクション部の面圧を確保できなくなる可能性がある為、大きなトルクを伝達可能な摩擦ローラ式減速機1を設計する面からは不利になる。
又、金属ばねの分野で広く知られている様に、前記皿ばね14を、完全に平板状にまで押し潰す状態で繰り返し使用すると、この皿ばね14の耐久性を確保しにくい。具体的には、比較的短期間の間にこの皿ばね14の弾性が低下し(へたり)、前記入力軸2に加えられるトルクが小さい状態で、前記各トラクション部の面圧を十分に確保できなくなり、これら各トラクション部で過大な滑りが発生し易くなる。この様な原因での皿ばね14のへたりは、この皿ばね14の弾性圧縮量を制限するストッパ機構を設ける事により防止できるが、特許文献3にはその様な構造は記載されていない。
本発明は、上述の様な事情に鑑みて、効率が良く、ストローク確保も容易で、しかも、耐久性を十分に確保し易いローディングカム装置を備えた摩擦ローラ式減速機、及び、この摩擦ローラ式減速機を組み込んだ電気自動車用駆動装置を実現すべく発明したものである。
本発明の摩擦ローラ式減速機及び電気自動車用駆動装置のうち、請求項1に記載した摩擦ローラ式減速機は、前述した従来から知られている摩擦ローラ式減速機と同様に、入力軸と、出力軸と、太陽ローラと、環状ローラと、複数個の中間ローラと、ローディングカム装置とを備える。
特に、本発明の摩擦ローラ式減速機に於いては、前記太陽ローラを構成する1対の太陽ローラ素子同士の間に、前記入力軸を介する事なく、直接これら両太陽ローラ素子同士を互いに近づく方向に付勢する弾性部材を設けている。そして、前記各ローラの周面同士の転がり接触部の面圧を確保する為の予圧を付与している。
特に、本発明の摩擦ローラ式減速機に於いては、前記太陽ローラを構成する1対の太陽ローラ素子同士の間に、前記入力軸を介する事なく、直接これら両太陽ローラ素子同士を互いに近づく方向に付勢する弾性部材を設けている。そして、前記各ローラの周面同士の転がり接触部の面圧を確保する為の予圧を付与している。
又、請求項8に記載した電気自動車用駆動装置は、電動モータと、この電動モータの出力軸と共に回転する入力軸を有する摩擦ローラ式減速機と、入力側伝達軸と出力側伝達軸との間の減速比を、少なくとも高低の2段階に変換可能な変速装置と、この変速装置の出力側伝達軸の回転を駆動輪に伝達する為の回転伝達装置とを備える。
特に、本発明の電気自動車用駆動装置に於いては、前記摩擦ローラ式減速機が、上述した様な摩擦ローラ式減速機である。
特に、本発明の電気自動車用駆動装置に於いては、前記摩擦ローラ式減速機が、上述した様な摩擦ローラ式減速機である。
上述の様に構成する本発明の摩擦ローラ式減速機によれば、ローディングカム装置の効率が良く、ストローク確保も容易で、しかも、耐久性を十分に確保し易い。従って、必要とする耐久性を確保しつつ、優れた伝達効率を有する摩擦ローラ式減速機の設計の自由度向上(設計の容易化)を図れる。そして、例えばこの摩擦ローラ式減速機を電気自動車用駆動装置に組み込んだ場合に、高効率の駆動装置を実現して、充電1回当りの走行可能距離を長くできる。
[実施の形態の第1例]
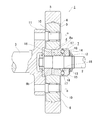
図1〜8は、請求項1、2、5、6に対応する、本発明の実施の形態の第1例を示している。図1に示す様に、本例の摩擦ローラ式減速機1aは、入力軸2aにより太陽ローラ4aを回転駆動し、この太陽ローラ4aの回転を、複数個の中間ローラ19、19を介して環状ローラ5aに伝達し、この環状ローラ5aの回転を出力軸3aから取り出す様にしている。前記各中間ローラ19、19は、それぞれの中心部に設けた自転軸20、20を中心として自転するのみで、前記太陽ローラ4aの周囲で公転する事はない。前記太陽ローラ4aは、互いに同じ形状を有する1対の太陽ローラ素子8c、8cを互いに同心に組み合わせて成り、これら両太陽ローラ素子8c、8cを軸方向両側から挟む位置に1対のローディングカム装置7a、7aを設置している。これら各部は、軸方向中間部の径が大きく、両端部の径が小さくなった、段付円筒状のハウジング21内に収納している。以下、これら各部の具体的構成に就いて説明する。
図1〜8は、請求項1、2、5、6に対応する、本発明の実施の形態の第1例を示している。図1に示す様に、本例の摩擦ローラ式減速機1aは、入力軸2aにより太陽ローラ4aを回転駆動し、この太陽ローラ4aの回転を、複数個の中間ローラ19、19を介して環状ローラ5aに伝達し、この環状ローラ5aの回転を出力軸3aから取り出す様にしている。前記各中間ローラ19、19は、それぞれの中心部に設けた自転軸20、20を中心として自転するのみで、前記太陽ローラ4aの周囲で公転する事はない。前記太陽ローラ4aは、互いに同じ形状を有する1対の太陽ローラ素子8c、8cを互いに同心に組み合わせて成り、これら両太陽ローラ素子8c、8cを軸方向両側から挟む位置に1対のローディングカム装置7a、7aを設置している。これら各部は、軸方向中間部の径が大きく、両端部の径が小さくなった、段付円筒状のハウジング21内に収納している。以下、これら各部の具体的構成に就いて説明する。
先ず、前記入力軸2aの基半部(図1の右半部)は前記ハウジング21の入力側小径円筒部22の内側に、多列玉軸受ユニット23により、前記出力軸3aは同じく出力側小径円筒部24の内側に複列玉軸受ユニット25により、それぞれ回転自在に支持している。この複列玉軸受ユニット25を構成する1対の玉軸受同士の間にはラビリンスシール26を設けて、外部空間側に配置する、前記出力軸3a側から、前記ハウジング21内への異物の侵入防止を図っている。前記入力軸2aと前記出力軸3aとは互いに同心に配置されており、このうちの入力軸2aの先端部を、この出力軸3aの基端面中央部に形成した円形凹部27の内側に、玉軸受28により支持している。この構成により、前記入力軸2aと前記出力軸3aとの相対回転の自在性を確保しつつ、この入力軸2aの先半部(図1の左半部)の支持剛性(特にラジアル剛性)を確保している。
前記両太陽ローラ素子8c、8cは、前記入力軸2aの先半部の周囲に、この入力軸2aと同心に、且つ、この入力軸2aに対する相対回転を可能に、且つ、互いの先端面(互いに対向する面)同士の間に隙間を介在させた状態で配置している。又、前記入力軸2aの中間部と先端部との2箇所位置で、前記両太陽ローラ素子8c、8cを軸方向両側から挟む位置に、前記両ローディングカム装置7a、7aを構成する1対のカム板15a、15aを外嵌固定している。これら両カム板15a、15aは、前記入力軸2aと同期して回転する。そして、互いに対向する、前記両太陽ローラ素子8c、8cの基端面と前記両カム板15a、15aの片側面との、それぞれ円周方向複数箇所ずつに、被駆動側カム面17、17と駆動側カム面18、18とを設けている。これら各カム面17、18の形状に就いては、基本的には、前述した従来構造の場合と同様で構わないが、要求される性能に応じて適宜異ならせる事は自由である。何れにしても前記各カム面17、18は、軸方向に関する深さが円周方向に関して漸次変化するもので、円周方向中央部で最も深く、同じく両端部に向かうに従って浅くなる。
又、本例の摩擦ローラ式減速機1aの場合には、前記両太陽ローラ素子8c、8cの基端部外周面に、それぞれ外向フランジ状の鍔部29、29を設けている。即ち、これら両太陽ローラ素子8c、8cの外周面のうち、前記各中間ローラ19、19の外周面と転がり接触する部分は、先端面に向かうに従って外径が小さくなる方向に傾斜した、部分円すい凸面状の傾斜面となっており、前記両鍔部29、29は、この傾斜面のうちで最も外径が大きくなった基端部から、全周に亙り径方向外方に突出している。そして、これら両鍔部29、29を含む、前記両太陽ローラ素子8c、8cの基端面に前記各被駆動側カム面17、17を、円周方向に関して等間隔に形成している。
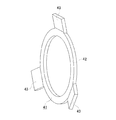
又、前記両太陽ローラ素子8c、8c同士の間に、それぞれが弾性部材である複数個(図示の例では3個)の板ばね30、30を掛け渡して、これら両太陽ローラ素子8c、8c同士の間に、互いに近付く方向の弾力を付与している。前記各板ばね30、30はそれぞれ、1個の基板部31と、1対の弾性押圧板部32、32とを備える。このうちの基板部31は、太陽ローラ4aの軸方向寸法よりも大きな長さ寸法を有する。尚、この太陽ローラ4aの軸方向寸法とは、前記両太陽ローラ素子8c、8cの軸方向寸法と、これら両太陽ローラ素子8c、8cの先端面同士の間に存在する隙間の厚さとの合計である。又、前記両弾性押圧板部32、32は、前記基板部31の長さ方向両端から、この基板部31の厚さ方向に関して同じ側に向けて、この基板部31とのなす角度が鋭角になるまで折り曲げられている。前記各板ばね30、30の自由状態で、前記両弾性押圧板部32、32の先端縁同士の間隔は、前記太陽ローラ4aの軸方向寸法よりも小さい。
それぞれが上述の様な形状を有する、前記各板ばね30、30は、それぞれの基板部31、31を前記両太陽ローラ素子8c、8cの内径側に、円周方向に関してほぼ等間隔に配置すると共に、それぞれの弾性押圧板部32、32の先端縁を、これら両太陽ローラ素子8c、8cの両端面に弾性的に当接させる。この状態で、これら両太陽ローラ素子8c、8cに、互いに近付く方向の弾力、即ち、ばね押圧力を付与した状態で、前記太陽ローラ4aとする。更に、この様な太陽ローラ4aと1対のカム板15a、15aとを、それぞれ複数個ずつの玉16、16を介して組み合わせる事により、前記両ローディングカム装置7a、7aを構成する。即ち、前記各カム面17、18同士の間に玉16、16を挟持した状態で、前記太陽ローラ4aを前記両カム板15a、15a同士の間に配置する。
上述の様に組み立てられる前記両ローディングカム装置7a、7aは、前記入力軸2aの回転に伴って前記各玉16、16を、前記各被駆動側カム面17、17及び前記各駆動側カム面18、18の浅い部分に向け変位させる。この変位により、前記両ローディングカム装置7a、7aに、軸方向に関する厚さ寸法を大きくする方向のカム部押圧力を発生させて、後述する様に、前記各ローラ4a、5a、19の周面同士の転がり接触部の面圧を上昇させる様にしている。但し、本例の場合には、前記各板ばね30、30の弾力に基づく、前記ばね押圧力の存在に基づき、前記両ローディングカム装置7a、7aが前記カム押圧力を発生させる以前の状態でも、前記各ローラ4a、5a、19の周面同士の転がり接触部の面圧を必要最低限以上確保する、与圧を付与している。
又、前記環状ローラ5aは、前記ハウジング21の軸方向中間部に設けた大径円筒部33の内径側で前記太陽ローラ4aの周囲部分に、この太陽ローラ4aと同心に配置している。本例の場合には、前記環状ローラ5aの内周面は、軸方向に関して内径が変化しない円筒面としている。又、この環状ローラ5aと前記出力軸3aの基端部とを、断面L字形の連結部34により連結している。
更に、前記各中間ローラ19、19は、前記環状ローラ5aの内周面と前記太陽ローラ4aとの間の環状空間9a内に、前記各自転軸20、20を中心とする回転(自転)を自在に、且つ、前記環状ローラ5a及び前記太陽ローラ4aの径方向に関する若干の変位を可能に設置している。この為に、前記ハウジング21の大径円筒部33の軸方向片側を塞ぐ端板35の内側面に、支持フレーム36を支持固定している。この支持フレーム36はこの端板35を含んで構成されるもので、遊星歯車機構を構成するキャリアの如き構造を有する。即ち、前記端板35と支持板37とを、前記各中間ローラ19、19の軸方向両側に配置し、これら両板35、37同士を、円周方向に関して前記各中間ローラ19、19同士の間部分に設置したステーにより結合固定している。
そして、前記両板35、37の互いに対向する部分に、それぞれガイドブロック38、38を支持固定している。これら各ガイドブロック38、38の内側面には、それぞれ前記環状ローラ5a及び前記太陽ローラ4aの径方向に長いガイド長孔39、39を形成している。一方、前記各自転軸20、20の端部には、それぞれ単列深溝型の玉軸受40、40を、それぞれの内輪をこれら各自転軸20、20の端部に締り嵌めで外嵌する事により支持している。又、前記各玉軸受40、40を構成する外輪の外径は、前記各ガイド長孔39、39の幅寸法よりも僅かに(例えば十数μm〜数十μm)小さい。従って、前記各自転軸20、20は前記支持フレーム36に対し、円周方向に関するがたつきが殆どない状態で、前記環状ローラ5a及び前記太陽ローラ4aの径方向に関する若干の変位を可能に支持されている。尚、前記各中間ローラ19、19の外周面は、軸方向中間部を単なる円筒面とし、両側部分を、前記両太陽ローラ素子8c、8cの外周面と同方向に同一角度傾斜した、部分円すい凸面状の傾斜面としている。従って、前記各ローラ4a、5a、19の周面同士は互いに線接触し、前記各トラクション部の接触面積を確保できる。
上述の様に構成する本例の摩擦ローラ式減速機1aは、次の様に作用して、前記入力軸2aから前記出力軸3aに動力を、減速すると同時にトルクを増大させつつ伝達する。
即ち、電動モータにより前記入力軸2aを回転駆動すると、この入力軸2aに外嵌した前記両カム板15a、15aが回転し、前記両太陽ローラ素子8c、8cが、前記各玉16、16と前記各カム面17、18との係合に基づき、互いに近づく方向に押圧されつつ、前記入力軸2aと同方向に同じ速度で回転する。そして、前記両太陽ローラ素子8c、8cにより構成される前記太陽ローラ4aの回転が、前記各中間ローラ19、19を介して前記環状ローラ5aに伝わり、前記出力軸3aから取り出される。前記摩擦ローラ式減速機1aの運転時に、前記ハウジング21内には、トラクションオイルを循環させる為、前記各ローラ4a、19、5aの周面同士の転がり接触部(トラクション部)には、トラクションオイルの薄膜が存在する状態となる。又、これら各トラクション部の面圧は、前記各板ばね30、30の弾力に基づいて発生するばね押圧力に基づいて、前記摩擦ローラ式減速機1aの起動の瞬間から或る程度確保される。従って、この起動の瞬間から、前記各トラクション部で過大な滑りを発生させる事なく、動力伝達が開始される。
即ち、電動モータにより前記入力軸2aを回転駆動すると、この入力軸2aに外嵌した前記両カム板15a、15aが回転し、前記両太陽ローラ素子8c、8cが、前記各玉16、16と前記各カム面17、18との係合に基づき、互いに近づく方向に押圧されつつ、前記入力軸2aと同方向に同じ速度で回転する。そして、前記両太陽ローラ素子8c、8cにより構成される前記太陽ローラ4aの回転が、前記各中間ローラ19、19を介して前記環状ローラ5aに伝わり、前記出力軸3aから取り出される。前記摩擦ローラ式減速機1aの運転時に、前記ハウジング21内には、トラクションオイルを循環させる為、前記各ローラ4a、19、5aの周面同士の転がり接触部(トラクション部)には、トラクションオイルの薄膜が存在する状態となる。又、これら各トラクション部の面圧は、前記各板ばね30、30の弾力に基づいて発生するばね押圧力に基づいて、前記摩擦ローラ式減速機1aの起動の瞬間から或る程度確保される。従って、この起動の瞬間から、前記各トラクション部で過大な滑りを発生させる事なく、動力伝達が開始される。
前記入力軸2aに加わるトルクが増大すると、前記両ローディングカム装置7a、7aを構成する前記各玉16、16の、前記各カム面17、18への乗り上げ量が増大し、これら両ローディングカム装置7a、7aの軸方向厚さが増大する。この結果、前記各トラクション部の面圧がより一層増大し、これら各トラクション部で、過大な滑りを発生する事なく、大きなトルクの伝達が行われる。これら各トラクション部の面圧は、前記入力軸2aと前記出力軸3aとの間で伝達すべきトルクに応じた適正な値、具体的には必要最小限の値に適切な安全率を乗じた値に、自動的に調整される。この結果、前記両軸2a、3a同士の間で伝達されるトルクの変動に拘らず、前記各トラクション部で過大な滑りが発生したり、逆に、これら各トラクション部の転がり抵抗が徒に大きくなる事を防止できて、前記摩擦ローラ式減速機1aの伝達効率を良好にできる。
又、上述の様に、これら各トラクション部の面圧を上昇させる過程で、前記各中間ローラ19、19が、前記環状ローラ5a及び前記太陽ローラ4aの径方向外方に、僅かに(例えば数百μm程度)変位する。例えば、図6の(A)に示す様に、前記各玉16、16が前記各カム面17、18の底部に存在して、前記両ローディングカム装置7a、7aの軸方向厚さが最も小さくなった状態から前記摩擦ローラ式減速機1aが起動すると、前記各玉16、16と前記各カム面17、18との係合に基づき、図6の(B)に示す様に、前記両ローディングカム装置7a、7aの軸方向厚さが増大する。そして、前記両太陽ローラ素子8c、8cが、前記摩擦ローラ式減速機1aの径方向に関して、前記各中間ローラ19の内側に食い込み、これら各中間ローラ19を、この径方向に関して外方に押す。本例の場合、前述の図1、8に示す様に、これら各中間ローラ19、19の両端部を支持する各玉軸受40、40の外輪が前記各ガイド長孔39、39の内側面と転がり接触している為、前記各中間ローラ19、19が前記径方向外方に、円滑に変位する。そして、前記各トラクション部の面圧が不均一になる事を防止する。本例の構造は、この面からも、前記各トラクション部の面圧を適正にして、前記摩擦ローラ式減速機1aの伝達効率を良好にできる。
尚、この摩擦ローラ式減速機1aが起動する際、前記両太陽ローラ素子8c、8cにより構成される前記太陽ローラ4aが軸方向に僅かに変位し、これに伴ってこの太陽ローラ4aの外周面と転がり接触した前記各中間ローラ19、19も軸方向に僅かに変位する可能性がある。本例の場合、これら各中間ローラ19、19の外周面と転がり接触する、前記環状ローラ5aの内周面は、軸方向に関して内径が変化しない、単なる円筒面である。又、前記各玉軸受40、40を係合させた、前記各ガイド長孔39、39は、前記軸方向変位を許容可能な程度の深さを有する。従って、前記各中間ローラ19、19の軸方向変位は円滑に行われ、これら各中間ローラ19、19の自転軸20、20が傾斜したりする事はない。
又、本例の場合には、前記各板ばね30、30により前記両太陽ローラ素子8c、8cを互いに近付く方向に押圧する事で、前記各トラクション部に与圧を付与している。この為、前記両ローディングカム装置7a、7aの効率が良く、ストローク確保も容易で、しかも、耐久性を十分に確保し易い。即ち、前記各板ばね30、30は、前記入力軸2aにトルクが入力された後も、前記両太陽ローラ素子8c、8cを、互いに近付く方向に押圧し続ける。従って、前記摩擦ローラ式減速機1aが運転されている間中、前記各板ばね30、30の弾力が、前記両太陽ローラ素子8c、8c同士を互いに近付け合う事に寄与する。前述の図18に示した従来構造の様に、ローディングカム装置7部分で発生するカム部押圧力が大きくなった状態で、皿ばね14の弾力が総合押圧力の増大に寄与しなくなる事はない。この為、前記各玉16、16の大きさや前記各カム面17、18の形状(傾斜角度)が同じであると仮定した場合に、前記従来構造によれば、入力軸2に加えられるトルクの大きさに応じて総合押圧力が図7に破線αで示す様に変化するのに対して、本例の構造によれば、同図に実線βで示す様に変化する。この結果、例えば必要とする総合押圧力が同じであると仮定した場合に、前記各カム面17、18の傾斜角度を大きくする事により、所定の総合押圧力を得るまでに、前記両太陽ローラ素子8c、8cと前記両カム板15a、15aとが周方向に相対変位する角度を小さく抑えられる。この角度を小さく抑えられる事は、前記摩擦ロータ式減速機1aの応答性(前記入力軸2aと前記出力軸3aとの回転同期性)の向上に寄与する。
又、耐久性の確保は、前記摩擦ローラ式減速機1aの運転状態の如何に拘らず、前記各圧縮板ばね30、30に無理な力が加わらない様にする事により図れる。即ち、これら各板ばね30、30の両端部に設けた、前記各弾性押圧板部32、32の弾性変形量は、前記入力軸2aに加わるトルクがゼロの状態で最も多くなり、このトルクが大きくなるに従って漸次小さくなる。このトルクがゼロである状態でも、前記各板ばね30、30に無理な力が加わる事はないので、長期間に亙る使用に拘らず、これら各板ばね30、30の弾性が低下する(へたる)事はなく、前記耐久性の確保を図れる。
[実施の形態の第2例]
図9〜12は、請求項1、3、5、6に対応する、本発明の実施の形態の第2例を示している。本例の場合には、太陽ローラ4aを軸方向両側から挟む位置に配置された、それぞれが弾性部材である1対の板ばね41、41により、前記太陽ローラ4aを構成する1対の太陽ローラ素子8c、8cを、互いに近付く方向に、弾性的に押圧している。前記両板ばね41、41は、それぞれ、1個ずつの基板部42と複数個ずつの弾性押圧板部43、43とから成る。このうちの基板部42は、円環状で、入力軸2aの外径よりも少しだけ大きな内径を有する。又、前記各弾性押圧板部43、43は、前記基板部42の外周縁の円周方向等間隔の複数箇所(図示の例では3箇所)から径方向外方に突出する状態で設けられており、前記基板部42の厚さ方向に関して互いに同方向に折れ曲がっている。
図9〜12は、請求項1、3、5、6に対応する、本発明の実施の形態の第2例を示している。本例の場合には、太陽ローラ4aを軸方向両側から挟む位置に配置された、それぞれが弾性部材である1対の板ばね41、41により、前記太陽ローラ4aを構成する1対の太陽ローラ素子8c、8cを、互いに近付く方向に、弾性的に押圧している。前記両板ばね41、41は、それぞれ、1個ずつの基板部42と複数個ずつの弾性押圧板部43、43とから成る。このうちの基板部42は、円環状で、入力軸2aの外径よりも少しだけ大きな内径を有する。又、前記各弾性押圧板部43、43は、前記基板部42の外周縁の円周方向等間隔の複数箇所(図示の例では3箇所)から径方向外方に突出する状態で設けられており、前記基板部42の厚さ方向に関して互いに同方向に折れ曲がっている。
上述の様な前記両板ばね41、41は、前記各弾性押圧板部43、43の折れ曲がり方向を前記両太陽ローラ素子8c、8cの軸方向端面に向けた状態で、前記入力軸2aの両端寄り部分で、これら両太陽ローラ素子8c、8cを軸方向両側から挟む部分に外嵌している。そして、前記入力軸2aの外周面に係止した止め輪44、44により、前記基板部42、42が前記両太陽ローラ素子8c、8cから離れる方向に変位する事を阻止している。この状態で前記各弾性押圧板部43、43の先端縁は、前記両太陽ローラ素子8c、8cの基端面に弾性的に押し付けられる。そして、これら両太陽ローラ素子8c、8cを互いに近付く方向に押圧し、各ローラの周面同士の転がり接触部である各トラクション部に与圧を付与する様にしている。
その他の部分の構成及び作用は、上述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
その他の部分の構成及び作用は、上述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
[実施の形態の第3例]
図13は、請求項1、4〜6に対応する、本発明の実施の形態の第3例を示している。本例の場合には、1対の太陽ローラ素子8d、8dの先半部(互いに対向する側の半部)内周面の円周方向複数箇所(例えば3〜4箇所)部分に、前記両太陽ローラ素子8d、8dの内周面と先端面とに開口する凹部45、45を形成し、これら各凹部45、45内に、それぞれが弾性部材である引っ張りばね46、46を、弾性的に伸張させた状態で配設している。この為に、前記各凹部45、45の内面の奥部に係止ピン47、47を固定し、これら各係止ピン47、47に、前記各引っ張りばね46、46の両端部に設けた係止部を係止している。そして、前記両太陽ローラ素子8d、8dを互いに近付く方向に引っ張り、各ローラの周面同士の転がり接触部である各トラクション部に与圧を付与する様にしている。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
図13は、請求項1、4〜6に対応する、本発明の実施の形態の第3例を示している。本例の場合には、1対の太陽ローラ素子8d、8dの先半部(互いに対向する側の半部)内周面の円周方向複数箇所(例えば3〜4箇所)部分に、前記両太陽ローラ素子8d、8dの内周面と先端面とに開口する凹部45、45を形成し、これら各凹部45、45内に、それぞれが弾性部材である引っ張りばね46、46を、弾性的に伸張させた状態で配設している。この為に、前記各凹部45、45の内面の奥部に係止ピン47、47を固定し、これら各係止ピン47、47に、前記各引っ張りばね46、46の両端部に設けた係止部を係止している。そして、前記両太陽ローラ素子8d、8dを互いに近付く方向に引っ張り、各ローラの周面同士の転がり接触部である各トラクション部に与圧を付与する様にしている。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
[実施の形態の第4例]
図14は、本発明の実施の形態の第4例を示している。本例の場合には、ローディングカム装置7aを、太陽ローラ4bの軸方向片側にのみ設けている。この為に、この太陽ローラ4bを構成する1対の太陽ローラ素子8c、8dのうちの一方(図14の右方)の太陽ローラ素子8cのみを、入力軸2bに対し相対回転を可能に支持し、他方(図14の左方)の太陽ローラ素子8dは、この入力軸2bに対し支持固定している。この様な本例の場合、軸方向寸法の短縮化を図れる。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
図14は、本発明の実施の形態の第4例を示している。本例の場合には、ローディングカム装置7aを、太陽ローラ4bの軸方向片側にのみ設けている。この為に、この太陽ローラ4bを構成する1対の太陽ローラ素子8c、8dのうちの一方(図14の右方)の太陽ローラ素子8cのみを、入力軸2bに対し相対回転を可能に支持し、他方(図14の左方)の太陽ローラ素子8dは、この入力軸2bに対し支持固定している。この様な本例の場合、軸方向寸法の短縮化を図れる。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する図示並びに説明は省略する。
[実施の形態の第5例]
図15は、請求項1、2、5〜7に対応する、本発明の実施の形態の第5例を示している。本例の場合には、摩擦ローラ式減速機1bの入力軸2cを、電動モータ48の出力軸49自体としている。即ち、これら入力軸2cと出力軸49とを、互いに同心に、且つ一体に構成している。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する説明は省略する。
図15は、請求項1、2、5〜7に対応する、本発明の実施の形態の第5例を示している。本例の場合には、摩擦ローラ式減速機1bの入力軸2cを、電動モータ48の出力軸49自体としている。即ち、これら入力軸2cと出力軸49とを、互いに同心に、且つ一体に構成している。
その他の部分の構成及び作用は、前述した実施の形態の第1例と同様であるから、重複する説明は省略する。
[実施の形態の第6例]
図16は、請求項8に対応する、本発明の実施の形態の第6例として、摩擦ローラ式減速機を組み込んだ、電気自動車用駆動装置を示している。この電気自動車用駆動装置は、電動モータ48aと、摩擦ローラ式減速機1cと、変速装置50と、回転伝達装置51とを備える。この摩擦ローラ式減速機1cに関しては、例えば、前述の図1に示した第1例と同様の構造のものを使用し、この摩擦ローラ式減速機1cの入力軸2aと、前記電動モータ48aの出力軸49aとを互いに同心に配置して、トルクの伝達を可能に接続する。又、前記摩擦ローラ式減速機1cの出力軸(図示省略)を、前記変速装置50の入力側伝達軸52と同心に配置して、トルクの伝達を可能に接続する。
図16は、請求項8に対応する、本発明の実施の形態の第6例として、摩擦ローラ式減速機を組み込んだ、電気自動車用駆動装置を示している。この電気自動車用駆動装置は、電動モータ48aと、摩擦ローラ式減速機1cと、変速装置50と、回転伝達装置51とを備える。この摩擦ローラ式減速機1cに関しては、例えば、前述の図1に示した第1例と同様の構造のものを使用し、この摩擦ローラ式減速機1cの入力軸2aと、前記電動モータ48aの出力軸49aとを互いに同心に配置して、トルクの伝達を可能に接続する。又、前記摩擦ローラ式減速機1cの出力軸(図示省略)を、前記変速装置50の入力側伝達軸52と同心に配置して、トルクの伝達を可能に接続する。
本例の場合に前記変速装置50は、前記入力側伝達軸52と出力側伝達軸53との間に、減速比が互いに異なる、1対の歯車伝達機構54a、54bを設けている。そして、1対のクラッチ機構55a、55bの切り換えにより、何れか一方の歯車伝達機構54a(54b)のみを、動力の伝達を可能な状態として、前記入力側伝達軸52と前記出力側伝達軸53との間の減速比を、高低の2段階に変換可能としている。
更に、前記回転伝達装置51は、複数の歯車を組み合わせた、一般的な歯車伝達機構であり、前記出力側伝達軸53の回転をデファレンシャルギヤ56の入力部に伝達し、左右1対の駆動輪を回転駆動する様に構成している。
更に、前記回転伝達装置51は、複数の歯車を組み合わせた、一般的な歯車伝達機構であり、前記出力側伝達軸53の回転をデファレンシャルギヤ56の入力部に伝達し、左右1対の駆動輪を回転駆動する様に構成している。
上述の様な本例の電気自動車用駆動装置の構造によれば、電気エネルギの効率的利用の為、前記電動モータ48aとして、小型且つ高回転型(例えば最高回転速度が3万min-1程度)のものを使用しても、運転時の振動及び騒音を抑えられる。即ち、第一段の減速機として、前記摩擦ローラ式減速機1cを使用しているので、高速回転部分での振動の発生を抑えられる。それぞれが歯車伝達機構である、前記変速装置50及び回転伝達装置51の回転速度は、一般的なガソリンエンジンを搭載した自動車の変速装置部分の運転速度と同程度(最高で数千min-1程度)に抑えられるので、何れの部分でも、不快な振動や騒音が発生する事はない。
更に本例の場合には、前記変速装置50を設ける事で、車両の走行速度と加速度との関係を、ガソリンエンジンを搭載した自動車に近い、滑らかなものにできる。この点に就いて、図17を参照しつつ説明する。例えば、前記電動モータ48aの出力軸49aと前記デファレンシャルギヤ56の入力部との間部分に、減速比の大きな動力伝達装置を設けた場合、電気自動車の加速度(G)と走行速度(km/h)との関係は、図17の実線aの左半部と鎖線bとを連続させた様になる。即ち、低速時の加速性能は優れているが、高速走行ができなくなる。これに対して、前記間部分に減速比の小さな動力伝達装置を設けた場合、前記関係は、図17の鎖線cと実線aの右半部とを連続させた様になる。即ち、高速走行は可能になるが、低速時の加速性能が損なわれる。これに対して、本例の様に前記変速装置50を設け、車速に応じてこの変速装置50の減速比を変えれば、前記実線aの左半部と右半部とを連続させた如き特性を得られる。この特性は、図17に破線dで示した、同等の出力を有するガソリンエンジン車とほぼ同等であり、加速性能及び高速性能に関して、ガソリンエンジン車と同等の性能を得られる事が分かる。
本発明の特徴は、太陽ローラを構成する1対の太陽ローラ素子を互いに近づく方向に押圧しつつ、入力軸の回転に伴って太陽ローラを回転駆動する、ローディングカム装置部分の構造にある。この太陽ローラを入力軸と共に回転させる事は必須であるが、出力軸と共に回転するローラは、必ずしも環状ローラである必要はない。即ち、前述の図18に示した様な、遊星ローラ式の摩擦ローラ式減速機で、本発明を実施する事もできる。この場合には、各中間ローラを、太陽ローラの周囲で自転しつつ公転する遊星ローラとし、これら各遊星ローラを支持しているキャリアに、出力軸の基端部を結合固定する。
更に、本発明のうちの電気自動車用駆動装置に関する発明を実施する場合に、摩擦ローラ式減速機と回転伝達装置との間に組み込む変速装置の種類は問わない。図示の構造の他に、遊星歯車式の変速装置を採用する事もできる。更には、ベルト式若しくはトロイダル式の無段変速装置を採用する事もできる。無段変速装置を採用すれば、前述の図17に示した様な、車両の走行速度と加速度との関係を、より理想に近い、滑らかなものにできる。
1、1a、1b、1c 摩擦ローラ式減速機
2、2a、2b、2c 入力軸
3、3a 出力軸
4、4a、4b 太陽ローラ
5、5a 環状ローラ
6 遊星ローラ
7、7a ローディングカム装置
8a、8b、8c、8d 太陽ローラ素子
9、9a 環状空間
10 遊星軸
11 キャリア
12 止め輪
13 支え環
14 皿ばね
15、15a カム板
16 玉
17 被駆動側カム面
18 駆動側カム面
19 中間ローラ
20 自転軸
21 ハウジング
22 入力側小径円筒部
23 多列玉軸受ユニット
24 出力側小径円筒部
25 複列玉軸受ユニット
26 ラビリンスシール
27 円形凹部
28 玉軸受
29 鍔部
30 板ばね
31 基板部
32 弾性押圧板部
33 大径円筒部
34 連結部
35 端板
36 支持フレーム
37 支持板
38 ガイドブロック
39 ガイド長孔
40 玉軸受
41 板ばね
42 基板部
43 弾性押圧板部
44 止め輪
45 凹部
46 引っ張りばね
47 係止ピン
48、48a 電動モータ
49、49a 出力軸
50 変速装置
51 回転伝達装置
52 入力側伝達軸
53 出力側伝達軸
54a、54b 歯車伝達機構
55a、55b クラッチ機構
56 デファレンシャルギヤ
2、2a、2b、2c 入力軸
3、3a 出力軸
4、4a、4b 太陽ローラ
5、5a 環状ローラ
6 遊星ローラ
7、7a ローディングカム装置
8a、8b、8c、8d 太陽ローラ素子
9、9a 環状空間
10 遊星軸
11 キャリア
12 止め輪
13 支え環
14 皿ばね
15、15a カム板
16 玉
17 被駆動側カム面
18 駆動側カム面
19 中間ローラ
20 自転軸
21 ハウジング
22 入力側小径円筒部
23 多列玉軸受ユニット
24 出力側小径円筒部
25 複列玉軸受ユニット
26 ラビリンスシール
27 円形凹部
28 玉軸受
29 鍔部
30 板ばね
31 基板部
32 弾性押圧板部
33 大径円筒部
34 連結部
35 端板
36 支持フレーム
37 支持板
38 ガイドブロック
39 ガイド長孔
40 玉軸受
41 板ばね
42 基板部
43 弾性押圧板部
44 止め輪
45 凹部
46 引っ張りばね
47 係止ピン
48、48a 電動モータ
49、49a 出力軸
50 変速装置
51 回転伝達装置
52 入力側伝達軸
53 出力側伝達軸
54a、54b 歯車伝達機構
55a、55b クラッチ機構
56 デファレンシャルギヤ
Claims (8)
- 入力軸と、出力軸と、太陽ローラと、環状ローラと、複数個の中間ローラと、ローディングカム装置とを備え、
このうちの太陽ローラは、軸方向に分割された1対の太陽ローラ素子を前記入力軸の周囲に、互いの先端面同士の間に隙間を介在させた状態で互いに同心に、且つ、この入力軸に対する相対回転を可能に配置して成るもので、前記両太陽ローラ素子の外周面は、それぞれの先端面に向かうに従って外径が小さくなる方向に傾斜した傾斜面であって、これら両傾斜面を転がり接触面としており、
前記環状ローラは、前記太陽ローラの周囲にこの太陽ローラと同心に配置されたもので、内周面を転がり接触面としており、
前記各中間ローラは、前記太陽ローラの外周面と前記環状ローラの内周面との間の環状空間の円周方向複数箇所に、それぞれが前記入力軸と平行に配置された自転軸を中心とする回転自在に支持された状態で、それぞれの外周面を前記太陽ローラの外周面と前記環状ローラの内周面とに転がり接触させており、
前記ローディングカム装置は、前記両太陽ローラ素子のうちの少なくとも一方の太陽ローラ素子である可動太陽ローラ素子と前記入力軸との間に設けられて、この入力軸の回転に伴ってこの可動太陽ローラ素子を相手方の太陽ローラ素子に向けて軸方向に押圧しつつ回転させるものであって、この可動太陽ローラ素子の基端面の円周方向複数箇所に設けられた被駆動側カム面と、前記入力軸の一部に固定されてこの入力軸と共に回転するカム板のうちで前記可動太陽ローラ素子の基端面に対向する片側面の円周方向複数箇所に設けられた駆動側カム面との間に転動体を挟持して成るもので、これら各駆動側カム面及び前記各被駆動側カム面はそれぞれ、軸方向に関する深さが円周方向に関して漸次変化して端部に向かうに従って浅くなる形状を有するものであり、
前記環状ローラと前記各自転軸を支持した部材とのうちの一方部材を固定し、他方の部材を前記出力軸に結合して、この他方の部材によりこの出力軸を回転駆動自在とした摩擦ローラ式減速機に於いて、
前記両太陽ローラ素子同士の間に、前記入力軸を介する事なく、直接これら両太陽ローラ素子同士を互いに近づく方向に付勢する弾性部材を設ける事により、前記各ローラの周面同士の転がり接触部の面圧を確保する為の予圧を付与する事を特徴とする摩擦ローラ式減速機。 - 前記弾性部材が、円周方向に関して複数箇所に設けられた、それぞれが前記太陽ローラの軸方向寸法よりも大きな長さ寸法を有する基板部と、この基板部の長さ方向両端からこの太陽ローラの径方向外方に向けて、この基板部とのなす角度が鋭角になるまで折り曲げられた1対の弾性押圧板部とを備えた複数の板ばねであり、これら各板ばねの基板部を、前記入力軸の外周面と前記太陽ローラの内周面との間の円筒状空間に配置した状態で、それぞれの弾性押圧板部の先端縁を、前記太陽ローラの軸方向両端面に当接させている、請求項1に記載した摩擦ローラ式減速機。
- 前記弾性部材が、前記太陽ローラを軸方向両側から挟む位置に配置された1対の板ばねであり、これら両板ばねは、前記入力軸に外嵌されて、この入力軸に係止された止め輪により、前記太陽ローラの軸方向端面から離れる方向への変位を阻止された円環状の基板部と、この基板部の外周縁の円周方向に関して複数箇所から前記太陽ローラの軸方向端面に向けて折れ曲がった弾性押圧板部とを備えたものであり、これら各弾性押圧板部の先端縁を、前記太陽ローラの軸方向両端面に当接させている、請求項1に記載した摩擦ローラ式減速機。
- 前記弾性部材が、前記両太陽ローラ素子の円周方向に関して複数箇所同士の間に掛け渡された引っ張りばねである、請求項1に記載した摩擦ローラ式減速機。
- 前記両太陽ローラ素子の基端部外周面に、それぞれ前記各中間ローラの外周面と転がり接触する傾斜面部分よりも外径が大きくなった外向フランジ状の鍔部が設けられており、前記各被駆動側カム面が、この鍔部を含む前記両太陽ローラ素子の基端面に設けられている、請求項1〜4のうちの何れか1項に記載した摩擦ローラ式減速機。
- 前記両太陽ローラ素子の外周面のうちで前記各中間ローラの外周面と転がり接触する部分が、先端面に向かうに従って外径が小さくなる方向に傾斜した、部分円すい凸面状の傾斜面であり、前記各中間ローラの外周面が、軸方向中間部に存在する、外径が軸方向に関して一定である円筒状凸面と、軸方向両端寄り部分に存在する、軸方向両端面に向かうに従って外径が小さくなる方向に傾斜した、それぞれが部分円すい凸面状である1対の傾斜面とを備えた複合曲面であり、前記環状ローラの内周面が、内径が軸方向に関して一定の円筒状凹面である、請求項1〜5のうちの何れか1項に記載した摩擦ローラ式減速機。
- 入力軸が電動モータの出力軸自体である、請求項1〜6のうちの何れか1項に記載した摩擦ローラ式減速機。
- 電動モータと、この電動モータの出力軸と共に回転する入力軸を有する摩擦ローラ式減速機と、この摩擦ローラ式減速機の出力軸により回転駆動される入力側伝達軸と出力側伝達軸とを有し、これら入力側伝達軸と出力側伝達軸との間の減速比を、少なくとも高低の2段階に変換可能な変速装置と、この変速装置の出力側伝達軸の回転を駆動輪に伝達する為の回転伝達装置とを備えた電気自動車用駆動装置に於いて、前記摩擦ローラ式減速機が、請求項1〜7のうちの何れか1項に記載した摩擦ローラ式減速機である事を特徴とする電気自動車用駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011057866A JP2012193792A (ja) | 2011-03-16 | 2011-03-16 | 摩擦ローラ式減速機及び電気自動車用駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011057866A JP2012193792A (ja) | 2011-03-16 | 2011-03-16 | 摩擦ローラ式減速機及び電気自動車用駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012193792A true JP2012193792A (ja) | 2012-10-11 |
Family
ID=47085876
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011057866A Withdrawn JP2012193792A (ja) | 2011-03-16 | 2011-03-16 | 摩擦ローラ式減速機及び電気自動車用駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012193792A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014190536A (ja) * | 2013-03-28 | 2014-10-06 | Nsk Ltd | ローディングカム装置及び摩擦ローラ式減速機 |
| JP2017002946A (ja) * | 2015-06-05 | 2017-01-05 | 日本精工株式会社 | 摩擦ローラ式減速機 |
| US10167932B2 (en) | 2014-09-26 | 2019-01-01 | Nsk Ltd. | Loading cam device and friction roller-type speed reducer |
-
2011
- 2011-03-16 JP JP2011057866A patent/JP2012193792A/ja not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014190536A (ja) * | 2013-03-28 | 2014-10-06 | Nsk Ltd | ローディングカム装置及び摩擦ローラ式減速機 |
| US10167932B2 (en) | 2014-09-26 | 2019-01-01 | Nsk Ltd. | Loading cam device and friction roller-type speed reducer |
| JP2017002946A (ja) * | 2015-06-05 | 2017-01-05 | 日本精工株式会社 | 摩擦ローラ式減速機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5903834B2 (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| CN102144112B (zh) | 无级变速器 | |
| CN103797274B (zh) | 无级变速器 | |
| US9482323B2 (en) | Friction roller reducer and drive unit for electric automobile | |
| JP2013231448A (ja) | 一方向クラッチ及び発電装置 | |
| JP2013044406A (ja) | 電動式変速機及び電気自動車用駆動装置 | |
| JP6094319B2 (ja) | 摩擦ローラ式減速機 | |
| JP2014040885A (ja) | 摩擦ローラ式変速機 | |
| JP2012193793A (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP2012193792A (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP2014163495A (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP2014196825A (ja) | 摩擦ローラ式減速機 | |
| JP2012197930A (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP2012193794A (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP2013104545A (ja) | 摩擦ローラ式減速機 | |
| JP6090502B2 (ja) | 一方向クラッチ及び発電装置 | |
| JP5867132B2 (ja) | 摩擦ローラ式減速機 | |
| JP2014040892A (ja) | 摩擦ローラ式変速機 | |
| JP2016008675A (ja) | 摩擦ローラ式減速機 | |
| JP5966420B2 (ja) | 摩擦ローラ式減速機 | |
| JP6314534B2 (ja) | 摩擦ローラ式減速機 | |
| KR102914532B1 (ko) | 축 지렛대 방식의 연쇄 예압을 이용한 롤러 마찰 감속기 | |
| JP2014040886A (ja) | 摩擦ローラ式変速機 | |
| JP5899851B2 (ja) | 摩擦ローラ式減速機 | |
| JP5418152B2 (ja) | 摩擦車式の無段変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |