JP2012193996A - ホッパ式計量装置 - Google Patents
ホッパ式計量装置 Download PDFInfo
- Publication number
- JP2012193996A JP2012193996A JP2011056893A JP2011056893A JP2012193996A JP 2012193996 A JP2012193996 A JP 2012193996A JP 2011056893 A JP2011056893 A JP 2011056893A JP 2011056893 A JP2011056893 A JP 2011056893A JP 2012193996 A JP2012193996 A JP 2012193996A
- Authority
- JP
- Japan
- Prior art keywords
- load
- span
- value
- load cell
- hopper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Weight Measurement For Supplying Or Discharging Of Specified Amounts Of Material (AREA)
Abstract
【解決手段】計量容器としてのホッパ2を支持する3個のロードセル1A,1B,1Cを備えてなるホッパ式計量装置において、3個のロードセル1A,1B,1Cのうち、特定のロードセルの荷重出力信号とその特定のロードセル以外のロードセルの荷重出力信号とを比較する比較部52bと、比較部52bの比較結果の変化の大きさに基づいて、3個のロードセル1A,1B,1Cのうちのいずれのロードセルのスパンが異常であるかを検出するスパン異常検出部52cとを備えるものとする。
【選択図】図4
Description
この零点調整手段は、荷重センサの出力和が0でない場合を表示値で確認して零点調整する手段である。しかし、複数の荷重センサの零点がそれぞれ移動したとしても、それら荷重センサの出力和が相殺して零である場合がある。
各荷重センサの出力信号の中には個別に零点変動量成分が含まれるので、精確にスパン変動を評価するには個々の荷重センサについての零点移動量を作業者が確認できる手段、および個々の荷重センサの出力別に零点調整する手段が必要である。しかし、特許文献1,2のものでは、通常の使用中に個別荷重センサの零点変動分に対する認識手段や零点調整手段が明らかにされていない。
精確にスパン異常を検出しようとすると、ロードセル個別に起きる零点変動を誤って荷重センサのスパン異常として検出し、警報してしまうことになる。
(2)ホッパへの被計量物の供給装置(ホッパへの供給口)とホッパとの位置関係から、被計量物の流動性が液体ほどよくないものであれば、供給された被計量物はホッパのいずれかの側、言い換えればいずれかの荷重センサの側に偏る傾向がある。
これらを要因として、毎回の計量において荷重センサの出力信号の相互には計量装置の構造と被計量物の性状に特有の固定的な偏差が発生する。
(3)ホッパ式計量装置の被計量物としては、単一の固体でないもの、つまり粉体、粒体、液体が計量対象とされ、ホッパによって積載位置が規制を受けるが、被計量物が液体でなければホッパ内に毎回の計量において完全に均一に収容されることは殆どない。被計量物の見掛け比重の分布も毎回の計量において完全に均一でない。したがって、毎回の計量において、被計量物の性状に応じて、荷重センサの出力信号の相互の差はばらつく。
上記特許文献1,2のものでは、これらの問題への対策が明らかでなく、具体的な対処が施されていない。
計量容器としてのホッパを支持する少なくとも3個の荷重センサを備えてなるホッパ式計量装置において、
前記荷重センサのうち、特定の荷重センサの荷重出力信号とその特定の荷重センサ以外の荷重センサの荷重出力信号とを比較する比較手段と、
前記比較手段の比較結果の変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出するスパン異常検出手段と、
を備えることを特徴とするものである(第1発明)。
前記荷重センサからの荷重出力信号の零点を個別に手動または自動的に調整する零点調整手段が設けられるのが好ましい(第2発明)。
前記荷重センサからの荷重出力信号のうちの少なくとも1個の荷重出力信号が前記零点調整手段によって個別に設定された零点から変動しているのを識別する零点変動識別手段が設けられるのが好ましい(第3発明)。
前記荷重センサからの荷重出力信号の安定判別を行うとともに、前記荷重センサの安定重量値を生成する安定重量値生成手段と、
前記安定重量値生成手段によって生成された最新の安定重量値と、この最新の安定重量値の一つ前のタイミングにおいて生成された安定重量値との差を安定荷重変化量として各荷重センサ毎に算出する安定荷重変化量算出手段とが設けられ、
前記スパン異常検出手段は、前記荷重センサのうちの特定の荷重センサにおける前記安定荷重変化量算出手段により算出された安定荷重変化量と、前記特定の荷重センサ以外の荷重センサにおける前記安定荷重変化量算出手段により算出された安定荷重変化量との比較結果の変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出するものとすることができる(第4発明)。
前記スパン異常検出手段は、前記荷重センサが正常な時点での前記比較手段の比較結果と、この比較結果が得られた後に前記比較手段が算出する比較結果との変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出するものとすることができる(第5発明)。
前記比較手段の比較結果の変化の大きさは、
その変化の大きさのバラツキを減衰させる減衰演算をもって算出されるものとすることができる(第6発明)。
前記荷重センサが正常である時点の前記比較手段の比較結果の大きさを初期値として記憶する記憶手段が設けられ、
前記比較手段の比較結果の変化の大きさは、前記初期値が前記記憶手段によって記憶された以降の稼働運転における前記比較手段の比較結果の前記初期値からの変化の大きさであるものとすることができる(第7発明)。
前記比較手段の比較結果の変化の大きさは、前記比較手段の比較結果の1からの変化の大きさであるものとすることができる(第8発明)。
スパン異常を判定する境界値は、予め定めたスパン異常についての許容値に、前記比較手段の比較結果の変化の大きさのバラツキ量を決定するバラツキ量決定手段により決定したバラツキ量を加算した値に設定されるものとすることができる(第9発明)。
前記スパン異常検出手段が検出したスパンの異常な荷重センサのスパンを、前記許容値に基づいて補正するスパン補正手段が設けられるのが好ましい(第10発明)。
本発明によれば、通常の計量作業の中で、ホッパを支持する少なくとも3個の荷重センサのうちいずれの荷重センサのスパンが異常になっているかを容易にかつ精確に検出することができる。
図1(a)(b)に示されるホッパ式計量装置は、複数個所(3点:a,b,c点)が複数の荷重センサ1A,1B,1Cにて吊り下げ支持される計量容器としてのホッパ2を備えている。ここで、荷重センサ1A,1B,1Cとしては、ストレインゲージ式や磁歪式、弦振動式など種々のものがあり、いずれの方式のものであってもよい。本実施形態においては、荷重センサ1A,1B,1Cとして、金属弾性体に設けた伸縮起歪部にストレインゲージを貼り付けてなるストレインゲージ式のロードセルが用いられた例を示す。以下、荷重センサ1A,1B,1Cをロードセル1A,1B,1Cと表記することとする。
ホッパ2は、下部に設けられた排出ゲート3,3が閉じられている状態にあるときに、上方に設けられた供給装置4から供給される被計量物Mを収容して計量を行うことができ、計量完了後、排出ゲート3,3を開くことで内部の被計量物Mを落下させて排出することができるように構成されている。
3個のロードセル1A,1B,1Cは、図1(a)に示されるように、円筒状のホッパ2の中心に対して、ロードセル1Aとロードセル1Bとが角度θ1を成すように、ロードセル1Aとロードセル1Cとが角度θ2を成すように、ロードセル1Bとロードセル1Cとが角度θ3を成すように、それぞれ配置されている。これらロードセル1A,1B,1Cは、平面視で、ホッパ2の中心点を基準にホッパ2をほぼ3等分するように配置される(θ1≒θ2≒θ3)。
各ロードセル1A,1B,1Cは、2つの梁(ビーム)6,7を有する起歪部8を備えている。起歪部8において、ビーム6にはストレインゲージ11,12が、ビーム7にはストレインゲージ13,14がそれぞれビームの長手方向に沿って貼り付けられている。起歪部8には、ホッパ2を吊り下げ支持するための吊り金具9(図1(b)参照)が結合されている。そして、ホッパ2内に被計量物Mが収容されると、その被計量物Mの重量に応じた荷重が起歪部8に作用し、ストレインゲージ12,14は、ゲージ接着面が伸びる方向の曲げ応力を受け、ストレインゲージ11,13は、ゲージ接着面が縮む方向の曲げ応力を受ける。
各ロードセル1A,1B,1Cの出力信号をそれぞれW1,W2,W3とする。これらの出力信号の処理には、それぞれ独立してスパン係数、零点重量記憶メモリ、初期重量記憶メモリが設けられる。
例えばロードセル1Aの調整に際しては、最初、スパン係数K1=1にセットし、ロードセル無負荷の状態にして初期荷重記憶スイッチを押し、ロードセル1Aの出力信号から得られるデジタル荷重信号Wa1を初期荷重Wi1として初期荷重記憶メモリに入れる。
W1=K1・(Wa1−Wi1)
この時点で、K1=1であり、Wa1=Wi1になるから、調整用重量測定装置にはW1=0と表示される。W1は実際に計量器における被計量物Mの重量測定値としての表示値の分解能に比べ、例えば4倍の分解能を有するように設定される。
すなわち、ロードセル1A,1B,1Cは同じ荷重に対して、全ての出力が等しくなるようにスパン係数が調整される。
この状態で計量装置用の重量測定装置に接続し、重量測定装置の初期荷重記憶スイッチを押すと、例えばロードセル1Aのブリッジ回路15から出力されるアナログ荷重信号はA/D変換され平滑処理された荷重信号Wa1が初期荷重記憶用メモリに入り、単体調整時に記憶された初期荷重値が変更される。
・ロードセル1Aについて
W1=K1・(Wa1−Wi1)−Wz1
・ロードセル1Bについて
W2=K2・(Wa2−Wi2)−Wz2
・ロードセル1Cについて
W3=K3・(Wa3−Wi3)−Wz3 ・・・(1)
こうして、同じ荷重負荷に対して、全てのロードセル1A,1B,1Cの出力が等しくなるように、スパン係数K1〜K3が調整される。
被計量物Mの重量値WTは、3個のロードセル1A,1B,1Cのフルブリッジ出力でもって、下記(2)式で表される。
WT=W1+W2+W3 ・・・(2)
ホッパ式計量装置使用中の手動零点調整操作として、使用中に重量測定装置において零点調整スイッチ55a(図4参照:本発明における「零点調整手段」に対応する。)を操作すれば、3個のロードセル1A,1B,1Cの出力が共通に同時に零点調整されるようにすれば好適である。ここで、零点調整とは、例えばW1について、零点調整時点のW1の値をWz1へ加算し、W1=0とする処理である。
また、自動零点補正機能として、各ロードセル1A,1B,1Cの出力の零点重量付近での安定状態を判別し、出力が安定状態であって、重量表示値のカウントレベルでは0表示であるが、内部カウントのレベルでは零から外れているときには、自動的に零点補正機能を各ロードセル1A,1B,1C毎に個別に実施する。この場合、各ロードセル1A,1B,1Cの出力信号を、被計量物Mの重量値としての最小単位の表示重量値の1カウントに対して少なくとも4倍以上大きいカウント数で表せるように高い分解能でもって処理する。
なお、かかる零点調整動作は、中央演算処理装置52の中の零点調整部52a(本発明における「零点調整手段」に対応する。)において実行される。
本実施形態では、3個のロードセル1A,1B,1Cのうち、特定のロードセルの出力信号とその特定のロードセル以外のロードセルの出力信号とを比較する演算処理が、中央演算処理装置52の中の比較部52b(本発明における「比較手段」に対応する。)において実行される。また、この比較部52bの比較結果の変化の大きさに基づいて、3個のロードセル1A,1B,1Cの中でスパンの異常なロードセルを検出する演算処理が、中央演算処理装置52の中のスパン異常検出部52c(本発明における「スパン異常検出手段」に対応する。)において実行される。
ホッパ式計量装置の重量表示は、ホッパ2内の被計量物Mの重量値である上記のWTの値が表示レベルの分解能に換算されて表示される。この表示値を見ながら作業者は計量作業を行う。したがって、例えばロードセル1Aの出力とロードセル1Bの出力とが正負方向にそれぞれ同じ大きさの値で零点変動したり、3個のロードセル1A,1B,1Cの出力がそれぞれ零点変動していても加算値WTとしての零点が0になったりした場合、表示値は0になり、零点調整スイッチ55aは押されない。
精確にいずれか1個のロードセルのスパン異常を検出するためには、各ロードセル1A,1B,1Cの零点が個別に調整されていることを認識できる手段又は個別に零点変動を認識できる手段を設けることが必要である。
このため、本実施形態では、中央演算処理装置52の中に零点変動識別部52d(本発明における「零点変動識別手段」に対応する。)を設け、この零点変動識別部52dにおいて、ロードセル1A,1B,1Cの出力が個別に設定された零点から変動しているのを識別するようにされる。また、本実施形態では、いずれか1個のロードセル出力が零でない場合、あるいは、全てのロードセル出力が零の場合に、その旨を表示装置54にランプ表示あるいは文字表示させるための表示信号を生成する零点表示信号生成部52eを中央演算処理装置52の中に設けるように構成している。こうすることで、いずれか1個でもロードセル出力の零点が移動している場合に、作業者はそのことを表示装置54により容易に認識することができ、零点調整スイッチ55aを押すことで、全てのロードセル出力の零点調整を同時に実施することができる。ここで、零点調整スイッチ55aは、通常の重量表示用の零点調整スイッチと兼用とするのが好ましい。
対策として、下記に述べる安定重量値が下限値Wzl、上限値Wzuの範囲にあるときには、ロードセル出力は零点範囲にあるとして零点フラグを1にセットする。フラグは全てのロードセル1A,1B,1Cの全ての零点フラグに対して設ける。
また、負荷荷重の除去検出用として零点より少し正方向に離れた重量値Wzzを予め設定する。そして、ロードセル出力の(下記に述べる)安定重量値がWzz以下へ戻りながらも上記の下限値Wzl、上限値Wzuで定められる範囲内に無ければ零点フラグはリセットされる。
全てのハーフブリッジについての零点フラグがセットされていない計量においては、下記に述べるスパン異常検出のための分類集計演算を実施させない(分類集計用データとして採用しない。)。
例えばロードセル1Aの出力W1について、このW1は、A/D変換器22から読み込まれる荷重信号を平滑処理した後、例えばTa=数100msecの時間間隔で生成されるものとし、この生成順に常に最新のM個のW1が用意されたM個のシフトレジスタに記憶されるようにし、記憶されたM個のW1における最大値−最小値が予め設定された安定限界の許容値以内であれば安定状態にあると判定する。こうしてロードセル1Aの出力に対して、時間間隔Ta毎に安定判別が逐次行われるとともに、シフトレジスタの平均値を算出して現在の重量測定用のW1、すなわちロードセル1Aの安定重量値とする。W1によって、最短でTa毎に安定が成立し被計量物Mの安定重量値が求められる。この演算処理は、中央演算処理装置52の中の安定重量値生成部52f(本発明における「安定重量値生成手段」に対応する。)において実行される。その他のロードセル1B,1Cの出力W2,W3についても同様である。
自動的に精確にスパン異常を検出するには、全てのロードセルの出力に対して次のように負荷荷重による変動量のみを算出する必要がある。このため、中央演算処理装置52の中に安定荷重変化量算出部52g(本発明における「安定荷重変化量算出手段」に対応する。)を設け、この安定荷重変化量算出部52gにおいて、最新の安定重量値と、この最新の安定重量値の一つ前のタイミングにおいて生成された安定重量値との差を安定荷重変化量として各ロードセル1A,1B,1C毎に算出する演算を実行させる。
なお、M個のW1の値が許容値を表す幅以内であれば安定と判定する。また、全てのロードセル1A,1B,1Cの出力に対して安定判別はTaの時間間隔で逐次行われる。
W1p=|W1−W1u|
W2p=|W2−W2u|
W3p=|W3−W3u| ・・・(3)
W1p〜W3p>Wh ・・・(4)
計量を正常状態に復帰させるためには、3個のロードセル1A,1B,1Cの中のいずれのロードセルのスパンが異常で、そのスパンの増減状態が検出できなければならない。
3個のロードセル1A,1B,1Cの中で特定の1個のロードセルと他のロードセルとの出力の比率を相対比率として、下記のように定義する(上記の荷重変化量でもって表す)。ロードセル1A,1B,1Cの出力の比率を取れば、計量毎に被計量物Mの荷重の大きさが異なっても、スパンの変化量を一定の値として検出できるので、評価が正しくできる。
・ロードセル1Aに関わる相対比率を
r12=W1p/W2p、r13=W1p/W3p
・ロードセル1Bに関わる相対比率を
r21=W2p/W1p、r23=W2p/W3p
・ロードセル1Cに関わる相対比率を
r31=W3p/W1p、r32=W3p/W2p ・・・(5)
r12=W1(1+e)/W2
=W1/W2+(W1/W2)・e=(W1/W2)・(1+e)
r13=W1/W3=(W1/W3)・(1+e)
r21=W2/{W1・(1+e)}≒(W1/W2)・(1−e)
r23=W2/W3
r31=W3/W1≒(W3/W1)・(1−e)
r32=W3/W2 ・・・(5)´
この条件では、全てのロードセル1A,1B,1Cが正常な状態でのr12〜r31は1であり、
(1)ロードセル1Aのスパンがeだけ増加あるいは減少した場合、
(2)ロードセル1Bのスパンがeだけ増加あるいは減少した場合、
(3)ロードセル1Bのスパンがeだけ増加あるいは減少した場合、
としてそれぞれの相対比率は、下記表1に示されるようになる。
また、3個のロードセル1A,1B,1Cの中でスパンが変動しているロードセルが特定されると、そのときの相対比率が1よりも大きいか小さいかを調べれば、スパンの変動の増減を判断することができる。
(1)ホッパ2と供給装置4との位置関係からホッパ2への被計量物Mの収容状態に固定的な偏りがある。
(2)ホッパ2の形状寸法の誤差やロードセル1A,1B,1Cの配置のずれ(図1(a)において角度θ1,θ2,θ3が互いに等しくないことによるロードセル間の固定的な配分比率分)がある。
(3)被計量物Mの収容状態の分布が自然に毎回ばらつく(図1(b)中において、被計量物Mの上面を示す実線、一点鎖線、二点鎖線および点線を参照)。また、収容された被計量物Mの見掛け比重の分布も毎回均一ではない。
r12=k1・Wx/(k2・Wx)=k1/k2≠1
r13=k2/k3≠1
・・・(5)´´
k1,k2,k3の値はそれぞれ1に近いが値は不明である。
つまり、任意の時点でr12〜r32について1と異なる数値が検出されてもそれがスパン異常によってそうなったものか、上記の固定的な偏差分によるものか不明である限りは判断できない。
r12i=W1p/W2p=k1/k2
であり、
ロードセル1Aのスパンがeだけ増加した時点のr12をr12vとすると、
r12v=W1p(1+e)/(W2p)=k1・Wx(1+e)/(k2・Wx)=(k1/k2)・(1+e)
であり、変化量は、
r12v−r12i=(k1/k2)・e
となる。
したがって、任意の時点におけるr12を算出し、0.99の値を検出してもスパンの変動量は−0.01(1%)ではない。
すなわち、全てのロードセル1A,1B,1Cのスパンが正常な場合の相対比率を1として、1を基準にスパン変化を判断しようとしてもできない。
(k1/k2)・e=0.99e
と表される。
k1/k2は1でないがほぼ1に近い値であり、これを誤差を示す値とみなすのであれば1からの変化量として大きいが、スパン変動量の係数としてみれば、r12はほぼeに近い変動量であると判断することができる。
したがって、全てのロードセル1A,1B,1Cのスパンが正常な時点での相対比率をr12i,r13i,・・・,r32iとし、そこからある期間が経過した時点での相対比率をr12v,r13v,・・・,r32vとし、スパンの変化量を調べるものとする。
E12=r12v−r12i=e
E13=r13v−r13i=e
E21=r21v−r21i=−e
E23=r23v−r23i=0
E31=r31v−r31i=−e
E32=r32v−r32i=0 ・・・(6)
また、ロードセル1Aのみスパンがeだけ減少した場合に異なる時点での相対比率の差を求めると、下記(7)式に示されるようになる。
E12=r12v−r12i=−e
E13=r13v−r13i=−e
E21=r21v−r21i=e
E23=r23v−r23i=0
E31=r31v−r31i=e
E32=r32v−r32i=0 ・・・(7)
(1)ロードセル1Aのスパンがeだけ増加あるいは減少した場合、
(2)ロードセル1Bのスパンがeだけ増加あるいは減少した場合、
(3)ロードセル1Cのスパンがeだけ増加あるいは減少した場合、
としてそれぞれの相対比率の正常な場合からの変化量は下記表2に示されるようになる。
(1)ロードセル1Aに関わる相対比率差|E12|,|E13|が共にeを超えていれば、ロードセル1Aのスパンがeを超えて変化している。そのときの増減はE12,E13の極性で判定し、+であれば増加、−であれば減少。
(2)ロードセル1Bに関わる相対比率差|E21|,|E23|が共にeを超えていれば、ロードセル1Bのスパンがeを超えて変化している。そのときの増減はE21,E23の極性で判定し、+であれば増加、−であれば減少。
(3)ロードセル1Cに関わる相対比率差|E31|,|E32|が共にeを超えていれば、ロードセル1Cのスパンがeを超えて変化している。そのときの増減はE31,E32の極性で判定し、+であれば増加、−であれば減少。
バラツキに対しては次のように対処する。ただし、被計量物Mが液体など、極めて均一にホッパ2内に収容され、密度も均一な物質の場合はr11〜r23に含まれるバラツキ量も小さいので平均回数を少なくすることができる。
予め、基本計量回数Q、初期値登録運転の計量回数v・Qとするための整数vの値、初期値登録運転の許容回数Qhを設定する。収容バラツキによる各ロードセル1A,1B,1Cの出力のバラツキは正規分布するものとする。また、異常と判定するためのスパン変化率の許容値としてeを設定する。
基本的にはある時点の相対比率を登録し、別の時点で相対比率を求めて登録値との間での相対比率の変化量をもってスパンの変動を検出する。
上述したように毎回の計量によるr12〜r23の値には、バラツキが存在する。したがって、下記のように平均値をもってバラツキを減衰させることによってスパン変化を検査する。なお、以下に述べるバラツキ減衰演算は、中央演算処理装置52の中のバラツキ減衰演算部52hにおいて実行される。
毎回、計量毎にr12〜r32とr122〜r322の値を算出し、それぞれのレジスタへ加算する。また、計量毎に各カウンタをインクリメントするという集計演算を実施する。
最初の基本計量回数Q回の計量が完了すると、計量回数Qによる集計演算結果によって、r12〜r32の平均値r12a〜r32aと標準偏差σ12〜σ32を求める。ここで、平均値r12a〜r32aの値をそれぞれDh12〜Dh32とする。
次回からの計量においてr12〜r32に対して、ここでは例えばr12に対して、下記(8)式に示されるように、r12に対して集計演算に採用する値に許容範囲を設ける。
Dh12=D12a±σ12 ・・・(8)
その結果、r12の約68%のものが採用され、大きいバラツキをもったものは集計に採用されない。r13〜r32に対しても同様に行う。r12〜r32の集計についてそれぞれに対する許容範囲Dh12〜Dh32が登録される。
r12〜r32が同時にQ回に到達するとは限らないので、先にQ回に到達したものがあれば、他のものがQ回に到達するのを待って(その間は集計せず)Q回ずつの集計毎に同期を取って実施する。
また、上記のv・Q回の集計値による標準偏差をσ12i〜σ32iと表す。
平均値r12ai〜r32aiの標準偏差σ12ai〜σ32aiはそれぞれ、下記(9)式のように表される。
σ12ai=σ12i/(v・Q)1/2
σ13ai=σ13i/(v・Q)1/2
σ21ai=σ21i/(v・Q)1/2
σ23ai=σ23i/(v・Q)1/2
σ31ai=σ31i/(v・Q)1/2
σ32ai=σ32i/(v・Q)1/2 ・・・(9)
初期値として、r12ai〜r32aiと標準偏差σ12ai〜σ32aiはメモリに登録される。
初期値の登録が完了すると、それ以降は通常の計量作業を継続しながらスパン変動の異常を検出する(これを異常検出運転と呼ぶ。)。
やはりr12〜r32はそれぞれ許容範囲Dh12〜Dh32によって選択されて集計される。
やはり基本計量回数Q回を1単位とし、r12〜r32のそれぞれについて集計回数がQの整数倍に到達する毎に、Q回分ずつの合計値と2乗合計値とをそれぞれv個のシフトレジスタへ順に記憶させる。したがって、最新のQ回分の集計値が記憶され、最も古いQ回分の集計値は廃棄され、常に最新のv個分の集計値が保存されるようにする。
その時点のr12〜r32の平均値の初期値からの変化量は上述したように、
E12=r12av−r12ai
E13=r13av−r13ai
E21=r21av−r21ai
E23=r23av−r23ai
E31=r31av−r31ai
E32=r32av−r32ai
と求める。
一方、E12〜E32の標準偏差σ12ae〜σ32aeは、
σ12ae=(σ12ai2+σ12av2)1/2
σ13ae=(σ13ai2+σ13av2)1/2
σ21ae=(σ21ai2+σ21av2)1/2
σ23ae=(σ23ai2+σ23av2)1/2
σ31ae=(σ31ai2+σ31av2)1/2
σ32ae=(σ32ai2+σ32av2)1/2
と求める。
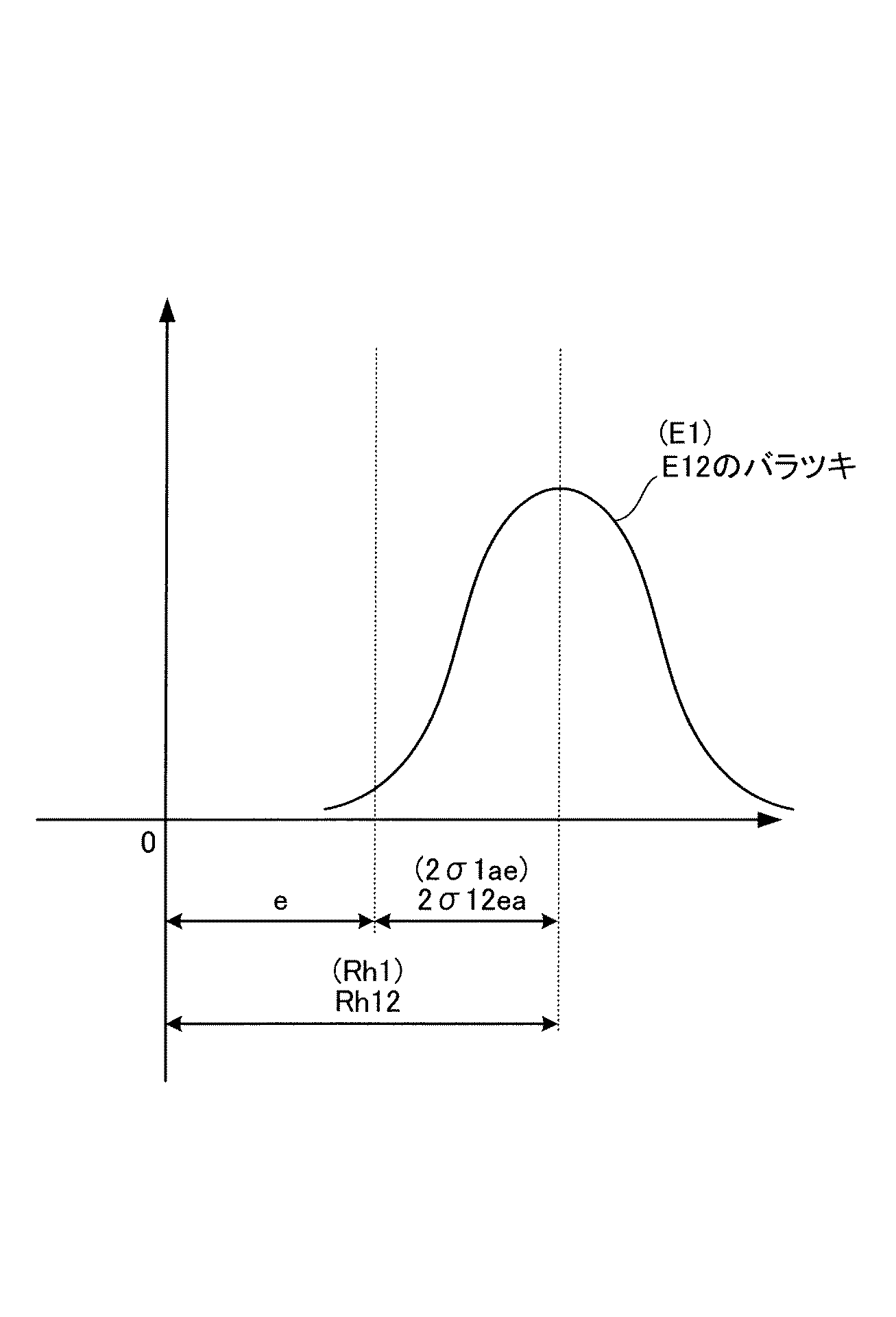
Rh12=e+2・σ12ae
と自動設定してE12の絶対値|E12|についての判定を行う。σ12aeの係数はロードセルの故障の程度を考慮して2以外の数値に定めてもよい。
同様に、|E13|〜|E32|についても
Rh13=e+2・σ13ae
Rh21=e+2・σ21ae
Rh23=e+2・σ23ae
Rh31=e+2・σ31ae
Rh32=e+2・σ32ae
と自動設定してそれぞれ|E13|〜|E32|の大きさの判定を行う。
ただし、収容バラツキの量は各ロードセル1A,1B,1Cに対してほぼ同一であるので、
Rh12≒Rh13≒・・・≒Rh32
である。したがって、σ12ae〜σ32aeを平均し、共通のRhをもって判定するようにしてもよい。
(1)ロードセル1Aに関わる相対比率差|E12|,|E13|が共にそれぞれRh12,Rh13を超えていれば、ロードセル1Aのスパンがeを超えて変化している。そのときの増減はE12,E13の極性で判定し、+であれば増加、−であれば減少。
(2)ロードセル1Bに関わる相対比率差|E21|,|E23|が共にそれぞれRh21,Rh23を超えていれば、ロードセル1Bのスパンがeを超えて変化している。そのときの増減はE21,E23の極性で判定し、+であれば増加、−であれば減少。
(3)ロードセル1Cに関わる相対比率差|E31|,|E32|が共にそれぞれRh31,Rh32を超えていれば、ロードセル1Cのスパンがeを超えて変化している。そのときの増減はE31,E32の極性で判定し、+であれば増加、−であれば減少。
相対比率を、下記のように設定して判定を行うこともできる。
・ロードセル1Aについて、
r1=W1p/{(W2p+W3p)/2}
・ロードセル1Bについて、
r2=W2p/{(W3p+W1p)/2}
・ロードセル1Cについて、
r3=W3p/{(W1p+W2p)/2}
r1=W1(1+e)/{(W2+W3)/2}
=2・W1/(W2+W3)+{2・W1/(W2+W3)}・e
r2=W2/[{W3+W1・(1+e)}/2]
=2・(W2/W1)/[{(W3+W1)/W1}+e]
≒2・W2/(W3+W1)−{2・W2・W1/(W3+W1)2}・e
r3=W3/[{W1・(1+e)+W2}/2]
=2・(W3/W1)/[{(W3+W1)/W1}+e]
≒2・W3/(W1+W2)−{2・W3・W1/(W1+W2)2}/e
・・・(5)´´´
この場合は各ロードセル1A,1B,1Cの正常な状態でのr1,r2,r3は1であるので、ロードセル1Aのスパンがeだけ増加すると、
r1=1+e、r2=1−(e/2)、r3=1−(e/2)
である。
反対にロードセル1Aのスパンがeだけ減少すると、
r1=1−e、r2=1+(e/2)、r3=1+(e/2)
である。
E1=r1v−r1i=e
E2=r2v−r2i=−(e/2)
E3=r3v−r3i=−(e/2)
である。
また、ロードセル1Aのみスパンがeだけ減少した場合は、
E1=r1v−r1i=−e
E2=r2v−r2i=(e/2)
E3=r3v−r3i=(e/2)
である。
E1=−(e/2)、E2=e、E3=−(e/2)
ロードセル1Bのみスパンがeだけ減少した場合は、
E1=(e/2)、E2=−e、E3=(e/2)
ロードセル1Cのみスパンがeだけ増加した場合は、
E1=−(e/2)、E2=−(e/2)、E3=e
ロードセル1Cのみスパンがeだけ減少した場合は、
E1=(e/2)、E2=(e/2)、E3=−e
となる。
(1)E1のみE1>eが成立すればロードセル1Aのスパンがeを超えて増加。
(2)E1のみE1<−eが成立すればロードセル1Aのスパンがeを超えて減少。
(3)E2のみE2>eが成立すればロードセル1Bのスパンがeを超えて増加。
(4)E2のみE2<−eが成立すればロードセル1Bのスパンがeを超えて減少。
(5)E3のみE3>eが成立すればロードセル1Cのスパンがeを超えて増加。
(6)E3のみE3<−eが成立すればロードセル1Cのスパンがeを超えて減少。
通常の計量作業を開始する前に被計量物Mによって十分な計量回数で調整が可能な場合は、調整モードにおいて、ロードセル1A,1B,1Cのスパンが正常であるとき、相対比率相互間の固定偏差分のみ含まれた(スパン移動分が含まれない)r1,r2,r3の値を初期値として求める(これを「初期値登録運転」と呼ぶ。)。
一般にバラツキを小さくするには多くの計量回数を必要とするので、調整モードとして扱うには実ラインにおいて困難な場合は、運転開始前に所定の負荷荷重によって重量測定値を確認し、ロードセル1A,1B,1Cが正常であることを確認した後に、次のように初期値の設定登録のための所定の期間を設け、r1,r2,r3の値を求めて登録する運転を実施する。
予め、基本計量回数Q、初期値登録運転の計量回数v・Qとするための整数vの値、初期値登録運転の許容回数Qhを設定する。
収容バラツキによる各ロードセル1A,1B,1Cの出力のバラツキは正規分布するものとする。
スパン異常と判定するためのスパン変化率の許容値としてeを設定する。
毎回、計量毎にr1,r2,r3とr12,r22,r32の値を算出し、それぞれのレジスタへ加算する。また、計量毎に各カウンタCA1,CA2,CA3をインクリメントするという集計演算を実施する。
最初の基本回数Q回の計量が完了すると、計量回数Qによる集計演算結果によってr1,r2,r3の平均値r1a,r2a,r3aと標準偏差σ1,σ2,σ3を求める。
Dh1=D12a±σ1 ・・・(8)´
その結果、r1の約68%のものが採用され、大きいバラツキをもったものは集計に採用されない。r2,r3に対しても同様に行う。r1,r2,r3の集計についてそれぞれに対する許容範囲Dh1,Dh2,Dh3が登録される。
r1,r2,r3が同時にQ回に到達するとは限らないので、先にQ回に到達したものがあれば、他のものがQ回に到達するとは限らないので、先にQ回に到達したものがあれば、他のものがQ回に到達するのを待って(その間は集計せず)Q回ずつの集計毎に同期を取って実施する。
また、上記のv・Q回の集計値による標準偏差をσ1i,σ2i,σ3iと表す。
平均値r1ai,r2ai,r3aiの標準偏差σ1ai,σ2ai,σ3aiはそれぞれ、下記(9)´のように表される。
σ1ai=σ1i/(v・Q)1/2
σ2ai=σ2i/(v・Q)1/2
σ3ai=σ3i/(v・Q)1/2 ・・・(9)´
初期値として、r1ai,r2ai,r3aiと標準偏差σ1ai,σ2ai,σ3aiはメモリに登録される。
初期値の登録が完了すると、それ以降は通常の計量作業を継続しながらスパン変動の異常を検出する(これを異常検出運転と呼ぶ。)。
やはりr1,r2,r3はそれぞれ許容範囲Dh1,Dh2,Dh3によって選択されて集計される。
やはり基本計量回数Q回を1単位とし、r1,r2,r3のそれぞれについて集計回数がQの整数倍に到達する毎に、Q回分ずつの合計値と2乗合計値とをそれぞれv個のシフトレジスタへ順に記憶させる。したがって、最新のQ回分の集計値が記憶され、最も古いQ回分の集計値は廃棄され、常に最新のv個分の集計値が保存されるようにする。
その時点のr1,r2,r3の平均値の初期値からの変化量は上述したように、
E1=r1av−r1ai
E2=r2av−r2ai
E3=r3av−r3ai
と求める。
一方、E1,E2,E3の標準偏差σ1ae,σ2ae,σ3aeは、
σ1ae=(σ1ai2+σ1av2)1/2
σ2ae=(σ2ai2+σ2av2)1/2
σ3ae=(σ3ai2+σ3av2)1/2
と求める。
E1にはこのようにバラツキが含まれるので、図5に示されるように、E1にバラツキが含まれていても、確実にE1が許容値eを超える変化をしていることを判定するには判定境界値Rh1として許容値eに推定バラツキ量を加え、
Rh1=e+2・σ1ae
と自動設定してE1についての判定を行う。これによって2シグマ、つまり約95%の確率でeを超える変化が判定されるが、更に確率を上げるために2以上の値を設定してもよい。また、自動設定方式でなく、予めバラツキ量の予想固定値を設定する方式であってもよい。
なお、ここで、バラツキ量を決定するための演算は、中央演算処理装置52の中のバラツキ量決定部52i(本発明における「バラツキ量決定手段」に対応する。)において実行される。
Rh2=e+2・σ2ae
Rh3=e+2・σ3ae
と自動設定してそれぞれE2,E3の大きさの判定を行う。
ただし、収容バラツキの量は各ロードセル1A,1B,1Cに対してほぼ同一であるので、
Rh1≒Rh2≒Rh3
である。したがって、Rh1〜Rh3の平均値Rhをもって境界値としてもよい。
(1)E1のみE1>Rh1が成立すればロードセル1Aのスパンがeを超えて増加。
(2)E1のみE1<−Rh1が成立すればロードセル1Aのスパンがeを超えて減少。
(3)E2のみE2>Rh2が成立すればロードセル1Bのスパンがeを超えて増加。
(4)E2のみE2<−Rh2が成立すればロードセル1Bのスパンがeを超えて減少。
(5)E3のみE3>Rh3が成立すればロードセル1Cのスパンがeを超えて増加。
(6)E3のみE3<−Rh3が成立すればロードセル1Cのスパンがeを超えて減少。
上記では収容バラツキによるr1,r2,r3のバラツキを平均値を求めることによって減衰させたが、他の手段によって行ってもよい。
例えば、基本計量回数Q回毎に中央値を求めて代表値とし、v個の代表値による平均値、標準偏差を求める方法、あるいは基本計量回数Q毎に最小2乗法によって直線式を求め、直線式上の、中央の回数である(Q/2)回における値を代表値とし、v個の代表値による平均値、標準偏差を求めるなど種々のバラツキ減衰演算を用いてもよい。
ロードセルの配置の不均等性やホッパ2の非対称性、供給装置4の偏りが、異常を警報する精度の観点から無視でき、収容バラツキのみが無視できない場合は、初期値登録運転の過程にてv・Q個の集計が完了した時点を異常検出・判定開始のタイミングとして、バラツキを減衰させた相対比率を求め、それ以降も集計回数がQ個に到達する度に最新の集計回数v・Q個によってバラツキを減衰させた相対比率を求め、バラツキを減衰させた相対比率の1からの変化量の大きさを判定する。この場合、判定境界値Rh1は、
Rh1=e+2・σ1av
とする。
計量作業の正常への復帰について、自動復帰と手動復帰の選択手段を備え、自動・手動復帰を選択することができるようにする。
自動復帰が選択されている場合は下記のスパン補正計算が自動的に実施される。手動復帰の場合はスパン復帰スイッチが設けてあって、スパン異常警報が発せられたとき手動でスパン復帰スイッチを押すと、スパン補正計算が実施される。
以下に述べるスパン補正の演算は、中央演算処理装置52の中のスパン補正部52j(本発明における「スパン補正手段」に対応する。)において実行される。
例えば、ロードセル1Aについてeを超えるスパン増加が判定された場合、E12の値はスパン変化率の増加分であるからW1のスパン係数K1を、K1(1−e)に置き換える。または安全を見込んでK1・(1−q・e)、0<q<1と補正する。
補正が完了すると、集計に用いたレジスタは全てリセットし次の補正に備える。
自動、手動に関わらず、復帰処理を終えると、復帰処理済みサインを表示する。
復帰処理後も、ロードセルの異常判定表示は残し、故障したロードセルの交換に備える。
本実施形態では、スパンの異常なロードセルの出力をスパン補正するようにしたので、毎回の計量において、上記の固定偏差分やバラツキ分があってもそれらを反映した精確な出力によって精確重量測定値を得ることができる。
以上は、ホッパ式計量装置が種々の大きさの荷重を持つ被計量物を計量する場合の比較手段として説明した。
しかし、毎回、ほぼ同一の大きさの荷重を持つ被計量物を計量する場合は、比較手段として、特定の荷重センサの荷重信号とその特定の荷重センサ以外の荷重センサの荷重信号の差を用いても、スパンの変動量を毎回同一の値として検出できるので、差に対する許容値を設定し、同様にして異常を評価することができる。
2 ホッパ(計量容器)
8 起歪部
11〜14 ストレインゲージ
15 フルブリッジ回路(ホイートストーンブリッジ回路)
52 中央演算処理装置
52a 零点調整部(零点調整手段)
52b 比較部(比較手段)
52c スパン異常検出部(スパン異常検出手段)
52d 零点変動識別部(零点変動識別手段)
52e 零点表示信号生成部
52f 安定重量値生成部(安定重量値生成手段)
52g 安定荷重変化量算出部(安定荷重変化量算出手段)
52h バラツキ減衰演算部(バラツキ減衰演算手段)
52i バラツキ量決定部(バラツキ量決定手段)
52j スパン補正部(スパン補正手段)
55a 零点調整スイッチ(零点調整手段)
Claims (10)
- 計量容器としてのホッパを支持する少なくとも3個の荷重センサを備えてなるホッパ式計量装置において、
前記荷重センサのうち、特定の荷重センサの荷重出力信号とその特定の荷重センサ以外の荷重センサの荷重出力信号とを比較する比較手段と、
前記比較手段の比較結果の変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出するスパン異常検出手段と、
を備えることを特徴とするホッパ式計量装置。 - 前記荷重センサからの荷重出力信号の零点を個別に手動または自動的に調整する零点調整手段が設けられる請求項1に記載のホッパ式計量装置。
- 前記荷重センサからの荷重出力信号のうちの少なくとも1個の荷重出力信号が前記零点調整手段によって個別に設定された零点から変動しているのを識別する零点変動識別手段が設けられる請求項2に記載のホッパ式計量装置。
- 前記荷重センサからの荷重出力信号の安定判別を行うとともに、前記荷重センサの安定重量値を生成する安定重量値生成手段と、
前記安定重量値生成手段によって生成された最新の安定重量値と、この最新の安定重量値の一つ前のタイミングにおいて生成された安定重量値との差を安定荷重変化量として各荷重センサ毎に算出する安定荷重変化量算出手段とが設けられ、
前記スパン異常検出手段は、前記荷重センサのうちの特定の荷重センサにおける前記安定荷重変化量算出手段により算出された安定荷重変化量と、前記特定の荷重センサ以外の荷重センサにおける前記安定荷重変化量算出手段により算出された安定荷重変化量との比較結果の変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出する請求項1に記載のホッパ式計量装置。 - 前記スパン異常検出手段は、前記荷重センサが正常な時点での前記比較手段の比較結果と、この比較結果が得られた後に前記比較手段が算出する比較結果との変化の大きさに基づいて、前記荷重センサのうちのいずれの荷重センサのスパンが異常であるかを検出する請求項1に記載のホッパ式計量装置。
- 前記比較手段の比較結果の変化の大きさは、その変化の大きさのバラツキを減衰させる減衰演算をもって算出される請求項1に記載のホッパ式計量装置。
- 前記荷重センサが正常である時点の前記比較手段の比較結果の大きさを初期値として記憶する記憶手段が設けられ、
前記比較手段の比較結果の変化の大きさは、前記初期値が前記記憶手段によって記憶された以降の稼働運転における前記比較手段の比較結果の前記初期値からの変化の大きさである請求項6に記載のホッパ式計量装置。 - 前記比較手段の比較結果の変化の大きさは、前記比較手段の比較結果の1からの変化の大きさである請求項6に記載のホッパ式計量装置。
- スパン異常を判定する境界値は、予め定めたスパン異常についての許容値に、前記比較手段の比較結果の変化の大きさのバラツキ量を決定するバラツキ量決定手段により決定したバラツキ量を加算した値に設定される請求項1に記載のホッパ式計量装置。
- 前記スパン異常検出手段が検出したスパンの異常な荷重センサのスパンを、前記許容値に基づいて補正するスパン補正手段が設けられる請求項9に記載のホッパ式計量装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056893A JP5704982B2 (ja) | 2011-03-15 | 2011-03-15 | ホッパ式計量装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056893A JP5704982B2 (ja) | 2011-03-15 | 2011-03-15 | ホッパ式計量装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012193996A true JP2012193996A (ja) | 2012-10-11 |
| JP5704982B2 JP5704982B2 (ja) | 2015-04-22 |
Family
ID=47086037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011056893A Active JP5704982B2 (ja) | 2011-03-15 | 2011-03-15 | ホッパ式計量装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5704982B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104344880A (zh) * | 2013-07-31 | 2015-02-11 | 梅特勒-托利多(常州)精密仪器有限公司 | 称重系统及用于称重系统的防作弊的方法和设备 |
| WO2016014421A1 (en) * | 2014-07-21 | 2016-01-28 | Mettler-Toledo, LLC | Weighing scale diagnostics method |
| JP2016114373A (ja) * | 2014-12-11 | 2016-06-23 | 大和製衡株式会社 | 組合せ秤 |
| WO2017197004A1 (en) * | 2016-05-12 | 2017-11-16 | Hewlett-Packard Development Company, L.P. | Mixer unit |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05264375A (ja) * | 1992-03-23 | 1993-10-12 | Yamato Scale Co Ltd | 力または荷重センサの故障診断装置及びその自己復帰装置 |
| JP2002071434A (ja) * | 2000-09-04 | 2002-03-08 | Kubota Corp | 容器付きはかり及びその信号処理方法 |
| JP2006153817A (ja) * | 2004-12-01 | 2006-06-15 | Yamato Scale Co Ltd | 重量充填装置の制御方法及び重量充填装置 |
| JP2006226961A (ja) * | 2005-02-21 | 2006-08-31 | Yamato Scale Co Ltd | 重量測定装置 |
| JP2007303984A (ja) * | 2006-05-12 | 2007-11-22 | Yamato Scale Co Ltd | 計量装置 |
-
2011
- 2011-03-15 JP JP2011056893A patent/JP5704982B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05264375A (ja) * | 1992-03-23 | 1993-10-12 | Yamato Scale Co Ltd | 力または荷重センサの故障診断装置及びその自己復帰装置 |
| JP2002071434A (ja) * | 2000-09-04 | 2002-03-08 | Kubota Corp | 容器付きはかり及びその信号処理方法 |
| JP2006153817A (ja) * | 2004-12-01 | 2006-06-15 | Yamato Scale Co Ltd | 重量充填装置の制御方法及び重量充填装置 |
| JP2006226961A (ja) * | 2005-02-21 | 2006-08-31 | Yamato Scale Co Ltd | 重量測定装置 |
| JP2007303984A (ja) * | 2006-05-12 | 2007-11-22 | Yamato Scale Co Ltd | 計量装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104344880A (zh) * | 2013-07-31 | 2015-02-11 | 梅特勒-托利多(常州)精密仪器有限公司 | 称重系统及用于称重系统的防作弊的方法和设备 |
| CN104344880B (zh) * | 2013-07-31 | 2017-12-22 | 梅特勒-托利多(常州)精密仪器有限公司 | 称重系统及用于称重系统的防作弊的方法和设备 |
| WO2016014421A1 (en) * | 2014-07-21 | 2016-01-28 | Mettler-Toledo, LLC | Weighing scale diagnostics method |
| JP2017521670A (ja) * | 2014-07-21 | 2017-08-03 | メトラー—トレド,エルエルシー | 秤量スケール診断方法 |
| AU2015292882B2 (en) * | 2014-07-21 | 2020-10-22 | Mettler-Toledo, LLC | Weighing scale diagnostics method |
| EP3940352A1 (en) * | 2014-07-21 | 2022-01-19 | Mettler-Toledo, LLC | Weighing scale diagnostics method |
| JP2016114373A (ja) * | 2014-12-11 | 2016-06-23 | 大和製衡株式会社 | 組合せ秤 |
| WO2017197004A1 (en) * | 2016-05-12 | 2017-11-16 | Hewlett-Packard Development Company, L.P. | Mixer unit |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5704982B2 (ja) | 2015-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3940352B1 (en) | Weighing scale diagnostics method | |
| AU2010239007B2 (en) | Weighing control device and method thereof for electronic belt scale | |
| JP5635248B2 (ja) | 計量装置 | |
| JP5679704B2 (ja) | ストレインゲージ式ロードセルの故障診断装置 | |
| JP5704982B2 (ja) | ホッパ式計量装置 | |
| JP4642504B2 (ja) | 重量測定装置 | |
| RU2401994C1 (ru) | Способ непрерывного измерения веса перемещаемых материалов на ленточных конвейерах, система для его осуществления и весовая роликоопора ленточного конвейера | |
| JP5904715B2 (ja) | コンベヤスケール | |
| JP5191520B2 (ja) | 重量測定装置 | |
| JP5669551B2 (ja) | ロードセルの故障診断装置 | |
| JP5730650B2 (ja) | コンベヤスケール用ロードセル | |
| JP5679837B2 (ja) | 計量装置 | |
| JP5219328B2 (ja) | 重量測定装置 | |
| JP5777401B2 (ja) | コンベヤスケール | |
| JP5545748B2 (ja) | コンベヤスケール | |
| JP5679852B2 (ja) | 計量装置 | |
| JP4801020B2 (ja) | 重量測定装置 | |
| JP5679862B2 (ja) | ホッパ式計量装置 | |
| JP5777407B2 (ja) | コンベヤスケール | |
| JP4744364B2 (ja) | 多連式重量選別機 | |
| JP5995681B2 (ja) | 計量装置 | |
| RU90552U1 (ru) | Система непрерывного измерения веса перемещаемых материалов на ленточных конвейерах и весовая роликоопора ленточного конвейера | |
| CN116026510B (zh) | 一种基于比例值算法计算张力表输出值的方法 | |
| CN110455393A (zh) | 一种准确性高的电子皮带秤实时监控方法 | |
| JP2011095216A (ja) | 計量装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5704982 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |