JP2012194175A - 姿勢判定方法、位置算出方法及び姿勢判定装置 - Google Patents
姿勢判定方法、位置算出方法及び姿勢判定装置 Download PDFInfo
- Publication number
- JP2012194175A JP2012194175A JP2011275235A JP2011275235A JP2012194175A JP 2012194175 A JP2012194175 A JP 2012194175A JP 2011275235 A JP2011275235 A JP 2011275235A JP 2011275235 A JP2011275235 A JP 2011275235A JP 2012194175 A JP2012194175 A JP 2012194175A
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- sensor
- coordinate
- posture
- vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/188—Compensation of inertial measurements, e.g. for temperature effects for accumulated errors, e.g. by coupling inertial systems with absolute positioning systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/019—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the type of sensor or the arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/02—Details
- G01C9/08—Means for compensating acceleration forces due to movement of instrument
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/086—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles wherein the vehicle mass is dynamically estimated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W52/00—Power management, e.g. Transmission Power Control [TPC] or power classes
- H04W52/02—Power saving arrangements
- H04W52/0209—Power saving arrangements in terminal devices
- H04W52/0251—Power saving arrangements in terminal devices using monitoring of local events, e.g. events related to user activity
- H04W52/0254—Power saving arrangements in terminal devices using monitoring of local events, e.g. events related to user activity detecting a user operation or a tactile contact or a motion of the device
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
- B60G2400/0512—Pitch angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
- B60G2400/0513—Yaw angle
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Manufacturing & Machinery (AREA)
- Navigation (AREA)
Abstract
【解決手段】移動体に設置されたセンサー3により移動ベクトルが計測される。そして、移動体が移動を開始した際にセンサー3が計測した移動ベクトルを用いて、移動体に対するセンサー3の姿勢が判定され、移動体が停止している場合に、移動体の速度に関する制約条件を用いて、センサー3の計測結果が補償される。
【選択図】図1
Description
1−1.全体システム
図1は、本実施形態における姿勢判定方法及び位置算出方法に係る全体システムのシステム構成の一例を示す図である。全体システムは、センサー3が搭載された移動体を有するシステムとして構成される。移動体は、自転車や自動車(四輪自動車及びバイクを含む)、電車、飛行機、船等の何れでもよいが、本実施形態では四輪自動車として説明する。
本実施形態における取付姿勢判定方法について説明する。センサー3が移動体に取り付けられた場合に、移動体に対するセンサー3の相対的な姿勢である取付姿勢を判定することが1つの目的である。本実施形態では、移動体が移動を開始した際にセンサー3が計測した移動ベクトルを用いて、センサー3の取付姿勢を判定する。前述したように、移動ベクトルには、速度ベクトルや加速度ベクトルが含まれる。そのため、本実施形態では、移動体が移動を開始した際に計測された速度ベクトルや加速度ベクトルを用いて、センサー3の取付姿勢を判定することになる。
図2は、第1の取付姿勢判定方法に係る第1の取付姿勢判定システム1A(第1の姿勢判定装置)のシステム構成図である。第1の取付姿勢判定システム1Aは、例えば、加速度センサー3Aと、ローカル座標速度ベクトル算出部5と、取付姿勢判定部10とを有する。

図3は、第2の取付姿勢判定方法に係る第2の取付姿勢判定システム1B(第2の姿勢判定装置)のシステム構成図である。第2の取付姿勢判定システム1Bは、例えば、加速度センサー3Aと、姿勢センサー3Bと、LA座標変換行列算出部20と、絶対座標加速度ベクトル算出部30と、絶対座標速度ベクトル算出部40と、取付姿勢判定部10とを有する。本実施形態において、加速度センサー3A及び姿勢センサー3Bは、共通のローカル座標系での値を計測するように、例えば一体的に構成される。
次に、上記の取付姿勢判定方法を用いて判定したセンサー3の取付姿勢と、移動ベクトルとを用いて、移動体の位置を算出する位置算出方法について説明する。
図4は、第1の位置算出方法に係る第1の位置算出システム2A(第1の位置算出装置)のシステム構成図である。第1の位置算出システム2Aは、例えば、第1の慣性航法システム(第1のINS(Inertial Navigation System))4Aと、取付姿勢判定部10と、移動状況判定部60と、速度制約条件設定部70と、LV座標変換行列算出部80と、補正部90とを有する。
図6は、第2の位置算出方法に係る第2の位置算出システム2B(第2の位置算出装置)のシステム構成図である。第2の位置算出システム2Bは、例えば、第2の慣性航法システム(第2のINS)4Bと、取付姿勢判定部10と、移動状況判定部60と、速度制約条件設定部70と、LV座標変換行列算出部80と、補正部90とを有する。
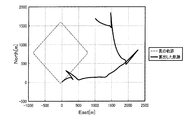
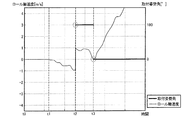
上記の位置算出方法の有効性を示すために、移動体の位置算出を行うシミュレーション実験を行った結果について説明する。設置ずれが生ずるようにセンサー3を移動体に取り付け、上記の位置算出方法を用いて移動体の位置を算出するシミュレーション実験を行った。
次に、上記の姿勢判定方法及び位置算出方法を適用したナビゲーションシステムの実施例について説明する。但し、本発明を適用可能な実施例が以下説明する実施例に限定されるわけではないことは勿論である。
図10は、カーナビゲーション装置1000の機能構成の一例を示すブロック図である。カーナビゲーション装置1000は、主要な機能構成として、処理部100と、操作部200と、表示部300と、IMU400と、記憶部500とを備えて構成される。
図10に示すように、記憶部500には、プログラムとして、処理部100により読み出され、ナビゲーション処理(図12参照)として実行されるナビゲーションプログラム510が記憶されている。ナビゲーションプログラム510は、補正処理(図13参照)として実行される補正プログラム511をサブルーチンとして含む。これらの処理については、フローチャートを用いて詳細に後述する。
図12は、記憶部500に記憶されているナビゲーションプログラム510が処理部100により読み出されて実行されることで、カーナビゲーション装置1000において実行されるナビゲーション処理の流れを示すフローチャートである。以下のナビゲーション処理では、IMU400により計測されたローカル座標加速度ベクトル及びローカル座標角速度が、記憶部500のIMU計測データ530に随時記憶されるものとする。
先ず、KF誤差推定部191は、移動時速度制約条件523が「ON」に設定されているか否かを判定する(ステップB1)。そして、移動時速度制約条件523が「ON」に設定されていると判定した場合は(ステップB1;Yes)、NL座標変換行列算出部193が、最新の絶対姿勢角を用いてNL座標変換行列を算出し、記憶部500の座標変換行列データ560に記憶させる(ステップB3)。
上記のカーナビゲーション装置1000を自動車に搭載し、実際に自動車を走行させて位置を算出する実験を行った。具体的には、上記のナビゲーション処理に従って自動車の位置を算出し、その位置をプロットする実験を行った。
本実施形態によれば、移動体に設置されたセンサー3により移動ベクトルが計測される。そして、移動体が移動を開始した際にセンサー3が計測した移動ベクトルを用いて、移動体に対するセンサー3の姿勢が判定される。
本発明を適用可能な実施例は、上記の実施例に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能であることは勿論である。以下、変形例について説明するが、上記の実施例と同一の構成要素については同一の符号を付して説明を省略し、上記の実施例とは異なる部分を中心に説明する。
上記の実施形態では、移動体が移動を開始した際に求めたLV座標変換行列を用いて位置算出を行うものとして説明した。しかし、移動体は必ずしも進行方向前方にのみ移動するとは限らない。例えば、移動体が四輪自動車であるならば、四輪自動車は前方に進行するに限らず、後方に進行する(バックする)場合もあり得る。
上記の実施形態では、慣性航法演算結果を補正する手法としてカルマンフィルターを例に挙げて説明したが、補正方法はこれに限られない。例えば、速度制約条件設定部70により設定された速度制約条件に含まれる制約速度ベクトルと、慣性航法演算で得られた速度ベクトルとの平均化処理を行って速度ベクトルを補正することとしてもよい。
上記の実施例では、電子機器にIMU400が搭載され、IMU400の計測結果に基づいて、電子機器の処理部が慣性航法演算処理を行うものとして説明した。しかし、電子機器にINSを搭載することとし、INSの処理部が慣性航法演算処理を行うこととしてもよい。この場合、電子機器の処理部は、INSから出力される慣性航法演算結果に含まれる誤差(慣性航法演算誤差)を推定する処理を行う。そして、推定した慣性航法演算誤差を用いて、INSから入力した慣性航法演算結果を補正する。
上記の実施形態では、移動体が停止した後に移動を開始する度に、センサー3の取付姿勢を判定するものとして説明した。しかし、姿勢判定タイミングは適宜設定可能である。例えば、センサー3が移動体に設置された後、移動体の初回の移動開始タイミングにのみセンサー3の取付姿勢を判定することとしてもよい。この場合は、初回以降は取付姿勢判定を行わず、初回に判定した取付姿勢を用いて処理を行うようにすればよい。
上記の実施形態では、移動体に対するセンサー3の取付姿勢のピッチ成分及びヨー成分の両方を判定するものとして説明したが、ピッチ成分及びヨー成分の何れか一方のみを判定することとしてもよいのは勿論である。
上記の実施形態では、移動中はセンサー3の取付姿勢に変化が生じないことを前提としていた。しかし、移動中の振動等によってセンサー3の取付姿勢の変化、すなわち設置ずれが生じる可能性がある。そこで、式(6)の状態ベクトルに設置ずれによる誤差角度の成分を追加し、KF誤差推定部191が移動時速度制約条件521を「ON」として求めた移動時観測ベクトルを用いてKF誤差推定処理を行って(ステップB9)、設置ずれの誤差角度を推定することとしてもよい。このようにすることで、移動中にセンサー3の取付姿勢が変化した場合であっても、図12や図16のステップA15の取付姿勢判定処理で判定された取付姿勢を随時補正することが可能となる。
図3等を用いて説明した取付姿勢の判定では、IMU400が計測するローカル座標加速度ベクトルにバイアス誤差がのっている場合、算出されるAL座標変換行列にもバイアス誤差が含まれるため、正確な姿勢の判定ができない場合が考えられる。そこで、次のようにしてもよい。
姿勢判定の判定タイミングが到来した場合、最新のローカル座標速度ベクトルをもとに、上述の式(2)及び式(3)を用いて取付姿勢を判定する(ステップD19)。
本発明は種々の移動体に適用可能である。好適な適用例は四輪自動車であるが、例えば移動時には縦方向や横方向に移動しないといった移動方向に関する制約を課すことができるのであれば、二輪自動車や自転車、電車、船、人間といった移動体にも本発明を適用可能である。
上記の実施例では、カーナビゲーション装置に本発明を適用した場合を例に挙げて説明したが、本発明を適用可能な電子機器はこれに限られるわけではない。例えば、携帯型ナビゲーション装置(ポータブルナビ)や携帯型電話機、パソコン、PDAといった他の電子機器にも本発明を適用可能である。
Claims (9)
- 移動体に設置された移動ベクトルを計測するセンサーが前記移動ベクトルを計測することと、
前記移動体が移動を開始した際に前記センサーが計測した前記移動ベクトルを用いて、前記移動体に対する前記センサーの姿勢を判定することと、
を含む姿勢判定方法。 - 前記移動体が停止している場合に、前記移動体の速度に関する第1の制約条件を用いて、前記センサーの計測結果を補償すること、
を更に含む請求項1に記載の姿勢判定方法。 - 前記姿勢を判定することは、前記移動体に対する前記姿勢のロール成分を判定せず、ピッチ成分及びヨー成分のうちの少なくも一方を判定することである、
請求項1又は2に記載の姿勢判定方法。 - 前記移動ベクトルを計測することは、前記移動体の移動空間を定める座標系である絶対座標系での移動ベクトルを計測することであり、
前記姿勢を判定することは、前記移動ベクトルと、前記絶対座標系で表した前記センサーの向きとを用いて、前記センサーの前記姿勢を判定することである、
請求項1〜3の何れか一項に記載の姿勢判定方法。 - 前記姿勢を判定することは、
前記移動体の停止時に前記センサーにより計測された移動ベクトルと、移動を開始した際に計測された移動ベクトルとを用いて、前記センサーの計測座標系であるローカル座標系における速度ベクトルを算出することと、
前記速度ベクトルを用いて前記センサーの姿勢を判定することと、
を含む、
請求項1〜3の何れか一項に記載の姿勢判定方法。 - 前記姿勢を判定することは、前記移動体の停止が解除されて前記移動体の速度又は加速度が所定の閾値に達した時の前記移動ベクトルを用いて前記姿勢を判定することである、
請求項1〜5の何れか一項に記載の姿勢判定方法。 - 請求項1〜6の何れか一項に記載の姿勢判定方法を用いて前記姿勢を判定することと、
前記姿勢と前記移動ベクトルとを用いて前記移動体の位置を算出することと、
を含む位置算出方法。 - 前記位置を算出することは、
前記移動ベクトルを用いて前記絶対座標系での前記移動体の絶対座標位置を算出することと、
前記姿勢と前記絶対座標系で表した前記センサーの向きとを用いて、前記絶対座標位置を、前記移動体を基準とする移動体座標位置に座標変換することと、
前記移動体座標位置と、前記移動体の移動方向に関する第2の制約条件とを用いて、前記絶対座標位置を補正することと、
を含む、
請求項7に記載の位置算出方法。 - 移動体に設置された移動ベクトルを計測するセンサーが前記移動体が移動を開始した際に計測した前記移動ベクトルを用いて、前記移動体に対する前記センサーの姿勢を判定する姿勢判定装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011275235A JP6094026B2 (ja) | 2011-03-02 | 2011-12-16 | 姿勢判定方法、位置算出方法及び姿勢判定装置 |
| EP12730046.5A EP2681513A1 (en) | 2011-03-02 | 2012-03-01 | Attitude determination method, position calculation method, and attitude determination device |
| US14/002,696 US9494428B2 (en) | 2011-03-02 | 2012-03-01 | Attitude determination method, position calculation method, and attitude determination device |
| PCT/JP2012/055894 WO2012118232A1 (en) | 2011-03-02 | 2012-03-01 | Attitude determination method, position calculation method, and attitude determination device |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011045265 | 2011-03-02 | ||
| JP2011045265 | 2011-03-02 | ||
| JP2011275235A JP6094026B2 (ja) | 2011-03-02 | 2011-12-16 | 姿勢判定方法、位置算出方法及び姿勢判定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012194175A true JP2012194175A (ja) | 2012-10-11 |
| JP2012194175A5 JP2012194175A5 (ja) | 2015-02-05 |
| JP6094026B2 JP6094026B2 (ja) | 2017-03-15 |
Family
ID=46384438
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011275235A Expired - Fee Related JP6094026B2 (ja) | 2011-03-02 | 2011-12-16 | 姿勢判定方法、位置算出方法及び姿勢判定装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9494428B2 (ja) |
| EP (1) | EP2681513A1 (ja) |
| JP (1) | JP6094026B2 (ja) |
| WO (1) | WO2012118232A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160033279A1 (en) * | 2014-07-31 | 2016-02-04 | Seiko Epson Corporation | Position calculation method and position calculation device |
| US9599475B2 (en) | 2013-03-25 | 2017-03-21 | Seiko Epson Corporation | Movement state information calculation method and movement state information calculation device |
| WO2018042628A1 (ja) * | 2016-09-02 | 2018-03-08 | パイオニア株式会社 | 速度算出装置、制御方法、プログラム及び記憶媒体 |
| JPWO2021106436A1 (ja) * | 2019-11-28 | 2021-06-03 | ||
| JP2021099373A (ja) * | 2020-05-29 | 2021-07-01 | 北京百度網訊科技有限公司 | 速度予測方法、装置、電子機器、記憶媒体及びコンピュータプログラム製品 |
| JPWO2020008878A1 (ja) * | 2018-07-02 | 2021-07-08 | ソニーグループ株式会社 | 測位装置、測位方法、及びプログラム |
| CN113277027A (zh) * | 2021-06-23 | 2021-08-20 | 哈尔滨工业大学(威海) | 一种船舶实时姿态测量方法 |
| JP2025520292A (ja) * | 2022-05-30 | 2025-07-03 | メルセデス・ベンツ グループ アクチェンゲゼルシャフト | 車両の慣性測定センサシステムをキャリブレーションする方法 |
| WO2025249277A1 (ja) * | 2024-05-30 | 2025-12-04 | ソニーグループ株式会社 | 情報処理方法、情報処理装置、及び情報処理プログラム |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9292017B2 (en) * | 2013-04-22 | 2016-03-22 | Dan Alan Preston | System and method for real-time guidance and mapping of a tunnel boring machine and tunnel |
| CN105874352B (zh) * | 2013-09-16 | 2018-12-14 | 应美盛股份有限公司 | 使用旋转半径确定设备与船只之间的错位的方法和装置 |
| GB201317508D0 (en) * | 2013-10-03 | 2013-11-20 | Dartt Ip Ltd | Improvements relating to Remote Monitoring of User Enviroments using Mobile Devices |
| JP6409346B2 (ja) * | 2014-06-04 | 2018-10-24 | 株式会社デンソー | 移動距離推定装置 |
| US9886040B1 (en) * | 2014-09-24 | 2018-02-06 | Rockwell Collins, Inc. | System and method for platform alignment, navigation or targeting |
| JP2016099270A (ja) * | 2014-11-25 | 2016-05-30 | セイコーエプソン株式会社 | 位置算出方法、位置算出装置及び位置算出プログラム |
| CN106645799B (zh) * | 2016-09-14 | 2019-09-06 | 邹红斌 | 参数校准方法及装置 |
| US10533856B2 (en) * | 2017-04-05 | 2020-01-14 | Novatel Inc. | Navigation system utilizing yaw rate constraint during inertial dead reckoning |
| JP6581144B2 (ja) * | 2017-04-28 | 2019-09-25 | 株式会社東芝 | 衛星捕捉装置および衛星捕捉方法 |
| JP6950460B2 (ja) | 2017-10-31 | 2021-10-13 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、慣性計測装置、移動体測位装置、携帯型電子機器、電子機器及び移動体 |
| CN108189637A (zh) * | 2017-12-29 | 2018-06-22 | 燕山大学 | 一种应急救援车辆主动悬挂作动器控制量的数据融合方法 |
| US10627236B2 (en) * | 2018-02-27 | 2020-04-21 | Sharp Kabushiki Kaisha | Position measurement apparatus, position correction method, and position information acquisition system |
| CN113793509B (zh) * | 2018-03-12 | 2024-04-16 | 深圳鼎然信息科技有限公司 | 基于运动传感器的路况分析方法、装置、设备及介质 |
| US20260029512A1 (en) * | 2018-03-28 | 2026-01-29 | Psionic Inc | Systems and methods for deterministic relative velocity vectors |
| CN112248940B (zh) * | 2020-08-27 | 2022-03-29 | 清华大学 | 一种用于车身姿态控制的传感器布置解算方法及系统 |
| FR3123720B1 (fr) * | 2021-06-04 | 2023-05-26 | Safran | Procede d’aide a la navigation d’un vehicule |
| CN113465628B (zh) * | 2021-06-17 | 2024-07-09 | 杭州鸿泉物联网技术股份有限公司 | 惯性测量单元数据补偿方法及系统 |
| WO2023075206A1 (ko) * | 2021-10-28 | 2023-05-04 | 캐롯손해보험 주식회사 | 요 계산 없이 운전 행동을 감지하는 방법 및 장치 |
| CN114323011B (zh) * | 2022-01-05 | 2024-04-23 | 中国兵器工业计算机应用技术研究所 | 一种适用于相对位姿测量的卡尔曼滤波方法 |
| CN114485622A (zh) * | 2022-02-09 | 2022-05-13 | 国科星图(深圳)数字技术产业研发中心有限公司 | 一种大坝水库可视化安全监测方法 |
| CN114234971B (zh) * | 2022-02-28 | 2022-07-19 | 西安星通通信科技有限公司 | 一种可降低噪声全姿态imu姿态解算方法 |
| CN114608610A (zh) * | 2022-03-09 | 2022-06-10 | 深圳元戎启行科技有限公司 | 车载惯导俯仰安装角的标定方法及相关装置 |
| CN115201873B (zh) * | 2022-09-06 | 2023-07-28 | 中冶智诚(武汉)工程技术有限公司 | 多体制协同室内外精密定位系统架构及其运行方法 |
| JP2024041548A (ja) * | 2022-09-14 | 2024-03-27 | アルプスアルパイン株式会社 | 自律航法システム |
| CN116380209A (zh) * | 2023-04-17 | 2023-07-04 | 上海交通大学 | 一种船用动态称重系统及基于姿态测量的动态补偿方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010032398A (ja) * | 2008-07-30 | 2010-02-12 | Alpine Electronics Inc | ナビゲーションシステムの位置検出装置および位置検出方法 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3237887A (en) * | 1959-11-27 | 1966-03-01 | Gen Motors Corp | Inertial guidance system |
| CN1090314C (zh) * | 1995-08-28 | 2002-09-04 | 数据技术株式会社 | 移动检测装置 |
| JP3591130B2 (ja) * | 1996-05-20 | 2004-11-17 | 松下電器産業株式会社 | ナビゲーション装置 |
| DE19732081A1 (de) * | 1997-07-25 | 1999-01-28 | Bosch Gmbh Robert | Verfahren und Anordnung zum Ermitteln der Inertiallage eines Fahrzeugs |
| US7216055B1 (en) * | 1998-06-05 | 2007-05-08 | Crossbow Technology, Inc. | Dynamic attitude measurement method and apparatus |
| US6532419B1 (en) | 1998-09-23 | 2003-03-11 | Magellan Dis, Inc. | Calibration of multi-axis accelerometer in vehicle navigation system |
| AU2001287079A1 (en) * | 2000-09-01 | 2002-03-13 | Magellan Dis Inc. | Calibration of multi-axis accelerometer in vehicle navigation system using gps data |
| JP4024075B2 (ja) * | 2002-04-26 | 2007-12-19 | パイオニア株式会社 | 移動状況算出装置、この方法、このプログラム、このプログラムを記録する記録媒体、および、ナビゲーション装置 |
| US7239949B2 (en) * | 2003-02-26 | 2007-07-03 | Ford Global Technologies, Llc | Integrated sensing system |
| KR100480793B1 (ko) * | 2003-06-16 | 2005-04-07 | 삼성전자주식회사 | 가속도 오차 보정 방법 및 장치, 및 이를 이용한 관성항법 시스템 |
| KR100543701B1 (ko) * | 2003-06-17 | 2006-01-20 | 삼성전자주식회사 | 공간형 입력 장치 및 방법 |
| US20050240347A1 (en) * | 2004-04-23 | 2005-10-27 | Yun-Chun Yang | Method and apparatus for adaptive filter based attitude updating |
| KR100977935B1 (ko) * | 2005-03-28 | 2010-08-24 | 아사히 가세이 일렉트로닉스 가부시끼가이샤 | 진행 방향 계측 장치 및 진행 방향 계측 방법 |
| US7600826B2 (en) * | 2005-11-09 | 2009-10-13 | Ford Global Technologies, Llc | System for dynamically determining axle loadings of a moving vehicle using integrated sensing system and its application in vehicle dynamics controls |
| US7711483B2 (en) | 2005-11-15 | 2010-05-04 | Sirf Technology, Inc. | Dead reckoning system |
| US20080143691A1 (en) * | 2005-11-23 | 2008-06-19 | Quiteso Technologies, Llc | Systems and methods for enabling tablet PC/pen to paper space |
| WO2007143806A2 (en) | 2006-06-15 | 2007-12-21 | Uti Limited Partnership | Vehicular navigation and positioning system |
| JP4321554B2 (ja) * | 2006-06-23 | 2009-08-26 | トヨタ自動車株式会社 | 姿勢角検出装置と姿勢角検出方法 |
| US20110307213A1 (en) * | 2006-07-10 | 2011-12-15 | Yang Zhao | System and method of sensing attitude and angular rate using a magnetic field sensor and accelerometer for portable electronic devices |
| US7885750B2 (en) * | 2006-08-30 | 2011-02-08 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine a sideslip angle |
| JP4964047B2 (ja) * | 2007-07-12 | 2012-06-27 | アルパイン株式会社 | 位置検出装置及び位置検出方法 |
| US9157737B2 (en) * | 2008-06-11 | 2015-10-13 | Trimble Navigation Limited | Altimeter with calibration |
| EP2303663B1 (de) * | 2008-07-09 | 2014-04-30 | Pascal Munnix | Vorrichtung und verfahren zur bestimmung des fahrzustandes eines fahrzeugs |
| US8639415B2 (en) * | 2008-08-25 | 2014-01-28 | Trw Automotive U.S., Llc | Method for correction of dynamic output signals of inertial sensors having mounting offsets |
| JP5233606B2 (ja) * | 2008-11-19 | 2013-07-10 | 富士通株式会社 | 絶対移動経路算出装置及び方法、並びにプログラム |
| JP5736106B2 (ja) * | 2009-05-19 | 2015-06-17 | 古野電気株式会社 | 移動状態検出装置 |
| US8249800B2 (en) * | 2009-06-09 | 2012-08-21 | Alpine Electronics, Inc. | Method and apparatus to detect platform stationary status using three-axis accelerometer outputs |
| JP5327330B2 (ja) * | 2009-09-25 | 2013-10-30 | 富士通株式会社 | 軌跡生成プログラムおよび軌跡生成装置 |
| KR20110035609A (ko) * | 2009-09-30 | 2011-04-06 | 삼성전자주식회사 | 움직임 감지 장치 및 방법 |
| CN102484660B (zh) * | 2010-01-07 | 2014-06-11 | 株式会社东芝 | 移动状态推测装置、方法及程序 |
| US8589015B2 (en) * | 2010-02-12 | 2013-11-19 | Webtech Wireless Inc. | Vehicle sensor calibration for determining vehicle dynamics |
| JP5071533B2 (ja) * | 2010-05-19 | 2012-11-14 | 株式会社デンソー | 車両用現在位置検出装置 |
| JP2012008096A (ja) * | 2010-06-28 | 2012-01-12 | Seiko Epson Corp | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
| US8843290B2 (en) * | 2010-07-22 | 2014-09-23 | Qualcomm Incorporated | Apparatus and methods for calibrating dynamic parameters of a vehicle navigation system |
| US8362949B2 (en) * | 2011-06-27 | 2013-01-29 | Google Inc. | GPS and MEMS hybrid location-detection architecture |
-
2011
- 2011-12-16 JP JP2011275235A patent/JP6094026B2/ja not_active Expired - Fee Related
-
2012
- 2012-03-01 US US14/002,696 patent/US9494428B2/en active Active
- 2012-03-01 WO PCT/JP2012/055894 patent/WO2012118232A1/en not_active Ceased
- 2012-03-01 EP EP12730046.5A patent/EP2681513A1/en not_active Withdrawn
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010032398A (ja) * | 2008-07-30 | 2010-02-12 | Alpine Electronics Inc | ナビゲーションシステムの位置検出装置および位置検出方法 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9599475B2 (en) | 2013-03-25 | 2017-03-21 | Seiko Epson Corporation | Movement state information calculation method and movement state information calculation device |
| US20160033279A1 (en) * | 2014-07-31 | 2016-02-04 | Seiko Epson Corporation | Position calculation method and position calculation device |
| CN105318872A (zh) * | 2014-07-31 | 2016-02-10 | 精工爱普生株式会社 | 位置算出方法以及位置算出装置 |
| US9759567B2 (en) * | 2014-07-31 | 2017-09-12 | Seiko Epson Corporation | Position calculation method and position calculation device |
| WO2018042628A1 (ja) * | 2016-09-02 | 2018-03-08 | パイオニア株式会社 | 速度算出装置、制御方法、プログラム及び記憶媒体 |
| US11203349B2 (en) | 2016-09-02 | 2021-12-21 | Pioneer Corporation | Velocity calculation apparatus, control method, program and storage medium |
| JPWO2020008878A1 (ja) * | 2018-07-02 | 2021-07-08 | ソニーグループ株式会社 | 測位装置、測位方法、及びプログラム |
| JP7342864B2 (ja) | 2018-07-02 | 2023-09-12 | ソニーグループ株式会社 | 測位プログラム、測位方法、及び測位装置 |
| US12085391B2 (en) | 2018-07-02 | 2024-09-10 | Sony Corporation | Positioning apparatus, positioning method, and program |
| WO2021106436A1 (ja) * | 2019-11-28 | 2021-06-03 | ソニーグループ株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| JPWO2021106436A1 (ja) * | 2019-11-28 | 2021-06-03 | ||
| US12087172B2 (en) | 2019-11-28 | 2024-09-10 | Sony Group Corporation | Image processing device and image processing method |
| JP7601002B2 (ja) | 2019-11-28 | 2024-12-17 | ソニーグループ株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| JP2021099373A (ja) * | 2020-05-29 | 2021-07-01 | 北京百度網訊科技有限公司 | 速度予測方法、装置、電子機器、記憶媒体及びコンピュータプログラム製品 |
| JP7372949B2 (ja) | 2020-05-29 | 2023-11-01 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 速度予測方法、装置、電子機器、記憶媒体及びコンピュータプログラム製品 |
| CN113277027A (zh) * | 2021-06-23 | 2021-08-20 | 哈尔滨工业大学(威海) | 一种船舶实时姿态测量方法 |
| CN113277027B (zh) * | 2021-06-23 | 2022-02-22 | 哈尔滨工业大学(威海) | 一种船舶实时姿态测量方法 |
| JP2025520292A (ja) * | 2022-05-30 | 2025-07-03 | メルセデス・ベンツ グループ アクチェンゲゼルシャフト | 車両の慣性測定センサシステムをキャリブレーションする方法 |
| WO2025249277A1 (ja) * | 2024-05-30 | 2025-12-04 | ソニーグループ株式会社 | 情報処理方法、情報処理装置、及び情報処理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130338915A1 (en) | 2013-12-19 |
| US9494428B2 (en) | 2016-11-15 |
| EP2681513A1 (en) | 2014-01-08 |
| JP6094026B2 (ja) | 2017-03-15 |
| WO2012118232A1 (en) | 2012-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6094026B2 (ja) | 姿勢判定方法、位置算出方法及び姿勢判定装置 | |
| JP7036080B2 (ja) | 慣性航法装置 | |
| JP6083279B2 (ja) | 移動状況情報算出方法及び移動状況情報算出装置 | |
| EP1653194B1 (en) | Azimuth/attitude detecting sensor | |
| CN103235328B (zh) | 一种gnss与mems组合导航的方法 | |
| JP5602070B2 (ja) | 位置標定装置、位置標定装置の位置標定方法および位置標定プログラム | |
| CN102313822B (zh) | 偏置估算方法、姿势估算方法、偏置估算装置及姿势估算装置 | |
| JP5742450B2 (ja) | 位置算出方法及び位置算出装置 | |
| JP2012173190A (ja) | 測位システム、測位方法 | |
| JP5842363B2 (ja) | 位置算出方法及び位置算出装置 | |
| CN110346824B (zh) | 一种车辆导航方法、系统、装置及可读存储介质 | |
| CN101099076B (zh) | 基于运动学模型的组合惯性导航系统 | |
| CN113566849B (zh) | 惯性测量单元的安装角度标定方法、装置和计算机设备 | |
| CN114964222A (zh) | 一种车载imu姿态初始化方法、安装角估计方法及装置 | |
| CN113566850B (zh) | 惯性测量单元的安装角度标定方法、装置和计算机设备 | |
| JP2004239643A (ja) | ハイブリッド航法装置 | |
| JP2016033473A (ja) | 位置算出方法及び位置算出装置 | |
| JP2012154769A (ja) | 加速度検出方法、位置算出方法及び加速度検出装置 | |
| WO2012137415A1 (ja) | 位置算出方法及び位置算出装置 | |
| JP5164645B2 (ja) | カルマンフィルタ処理における繰り返し演算制御方法及び装置 | |
| CN110440797A (zh) | 车辆姿态估计方法及系统 | |
| EP4179274B1 (en) | Absolute heading estimation with constrained motion | |
| CN106646569B (zh) | 一种导航定位方法及设备 | |
| JP4527171B2 (ja) | 単一gpsと慣性データ(加速度,角速度)によるビークル姿勢角の計測方法 | |
| CN110361002A (zh) | 适用于路基车辆的简化惯导系统姿态测量方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160819 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6094026 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |