JP2012196260A - 放射線治療装置制御装置、その処理方法、及びプログラム - Google Patents
放射線治療装置制御装置、その処理方法、及びプログラム Download PDFInfo
- Publication number
- JP2012196260A JP2012196260A JP2011061024A JP2011061024A JP2012196260A JP 2012196260 A JP2012196260 A JP 2012196260A JP 2011061024 A JP2011061024 A JP 2011061024A JP 2011061024 A JP2011061024 A JP 2011061024A JP 2012196260 A JP2012196260 A JP 2012196260A
- Authority
- JP
- Japan
- Prior art keywords
- image
- radiation
- body motion
- image data
- motion phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001959 radiotherapy Methods 0.000 title claims abstract description 89
- 238000003672 processing method Methods 0.000 title claims description 5
- 230000005855 radiation Effects 0.000 claims abstract description 194
- 230000033001 locomotion Effects 0.000 claims description 90
- 238000000034 method Methods 0.000 claims description 70
- 238000001514 detection method Methods 0.000 claims description 7
- 230000001678 irradiating effect Effects 0.000 claims description 7
- 230000000241 respiratory effect Effects 0.000 abstract description 101
- 206010073306 Exposure to radiation Diseases 0.000 abstract 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 40
- 238000004364 calculation method Methods 0.000 description 30
- 230000001225 therapeutic effect Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 8
- 239000003550 marker Substances 0.000 description 7
- 238000003491 array Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000000737 periodic effect Effects 0.000 description 4
- 239000000284 extract Substances 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000001154 acute effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 210000000278 spinal cord Anatomy 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/103—Treatment planning systems
- A61N5/1039—Treatment planning systems using functional images, e.g. PET or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1054—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using a portal imaging system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1059—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using cameras imaging the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1061—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using an x-ray imaging system having a separate imaging source
- A61N2005/1062—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using an x-ray imaging system having a separate imaging source using virtual X-ray images, e.g. digitally reconstructed radiographs [DRR]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1064—Monitoring, verifying, controlling systems and methods for adjusting radiation treatment in response to monitoring
- A61N5/1065—Beam adjustment
- A61N5/1067—Beam adjustment in real time, i.e. during treatment
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radiation-Therapy Devices (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
【解決手段】呼吸位相ごとに生成されたCT画像データ群の中から、患部を写すCT画像データを複数の呼吸位相について選択し、更新対象のCT画像データを用いて呼吸位相に応じた再構成画像を線源及びセンサアレイの回転角度ごとに生成する。回転角度が所定の回転角度である場合に放射線を照射した際の患部を写す放射線投影画像を生成し、複数の呼吸位相ごとの再構成画像と放射線投影画像とを比較して差分が少ない再構成画像が示す呼吸位相を、現在の呼吸位相と判定し、当該呼吸位相のCT画像データ群内のCT画像データにおいて予め算出されている患部の位置を、現在の前記患部の位置と特定する。
【選択図】図2
Description
そこでこの発明は、上述の課題を解決することのできる放射線治療装置制御装置及びその処理方法とプログラムを提供することを目的としている。
本発明では、呼吸、心拍などの周期的な体動運動の体動位相毎にCT画像データを作成することを前提としているが、簡易化のため、以下の説明では体動運動として呼吸位相のみを対象とした説明を行う。
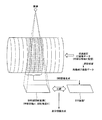
まず、制御対象である放射線治療装置の概要について説明する。図1は、放射線治療装置を示している。
この図で示すように放射線治療装置3は、旋回駆動装置11とOリング12と走行ガントリ14と首振り機構15と治療用放射線照射装置16とを備えている。旋回駆動装置11は、回転軸17を中心に回転可能にOリング12を土台に支持し、放射線治療装置制御装置1により制御されて回転軸17を中心にOリング12を回転させる。回転軸17は、鉛直方向に平行である。Oリング12は、回転軸18を中心とするリング状に形成され、回転軸18を中心に回転可能に走行ガントリ14を支持している。回転軸18は、鉛直方向に垂直であり、回転軸17に含まれるアイソセンタ19を通る。回転軸18は、さらに、Oリング12に対して固定され、すなわち、Oリング12とともに回転軸17を中心に回転する。走行ガントリ14は、回転軸18を中心とするリング状に形成され、Oリング12のリングと同心円になるように配置されている。放射線治療装置3は、さらに、図示されていない走行駆動装置を備えている。その走行駆動装置は、放射線治療装置制御装置1により制御されて回転軸18を中心に走行ガントリ14を回転させる。
診断用X線源24とセンサアレイ32、診断用X線源25とセンサアレイ33、及び治療用放射線照射装置16とセンサアレイ31は、それぞれ、走行ガントリ14をOリング12に沿って走行させると、互いの位置関係を保ちつつ、アイソセンタ19を通る回転軸18回りに回転させることができる。以下において、所定の位置を基準とした、走行ガントリ14、並びに、診断用X線源24、25、治療用放射線照射装置16及びセンサアレイ31〜33の回転軸18回りの回転角度を、単に回転角度と称する。
また、放射線治療装置3は、図示しない赤外線カメラを備えており、赤外線カメラによって生体に取付けられた赤外線マーカの動きを検出する。赤外線マーカは、生体における呼吸の周期及び位相と対応する周期及び位相で周期的な動きをする。放射線治療装置3は、放射線治療装置制御装置1の制御によって生体に放射線を照射する際に、検出された赤外線マーカの動きから、当該マーカの周期的な動きにおける位相を抽出し、抽出した位相のデータを呼吸位相に係る情報として放射線治療装置制御装置1へ通知する。そして、放射線治療装置制御装置1は、初期設定CT画像データ群、異なる呼吸位相、複数の回転角度による放射線投影画像に基づいて、CT画像データを生成する。
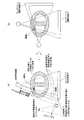
図2において、符号1は、線源と当該線源に対向する位置に配されたセンサアレイとの間に配置された生体へ、線源から照射軸に沿って放射線を照射して生体の患部を治療する放射線治療装置3を制御する放射線治療装置制御装置である。
ここで線源とは、診断用X線源または治療用放射線照射装置を意味する。
図2に示すように、放射線治療装置制御装置1は、CT画像選択部102、再構成画像生成部103、放射線投影画像生成部104、呼吸位相判定部105、患部追尾処理部106、CT画像更新部107、及び患部位置算出部109の各処理部と、各処理部を制御する制御部101と、各処理部での処理に利用される情報を記憶するデータベース108と、を備えている。
再構成画像生成部103は、CT画像データを用いて呼吸位相に応じた再構成画像を複数の前記回転角度ごとに生成する処理部である。
放射線投影画像生成部104は、所定の回転角度で線源からセンサアレイ側に放射線を照射した際の患部を写す放射線投影画像を生成する処理部である。
患部追尾処理部106は、時間の経過に従って逐次に生成された放射線投影画像に基づいて判定された呼吸位相の、CT画像データ群内のCT画像データにおいて予め算出されている患部の位置を、現在の前記患部の位置と判定する処理部である。
CT画像更新部107は、予め生成されてデータベース108に記録されている呼吸位相毎の初期設定CT画像データ群を用いて、更新処理を行い、呼吸位相毎のCT画像データ群(再構成CT画像データ群)を作成する処理部である。予め生成されてデータベース108に記録されている初期設定CT画像データ群は、他の装置で事前に生成されたものであってもよいし、放射線治療装置制御装置1で事前に生成したものであってもよい。
患部位置算出部109は、CT画像更新部107によって更新されたCT画像データにおいて患部の位置を算出する処理部である。
このような処理部やデータベースを備えることにより、本実施形態の放射線治療装置制御装置1は、生体内で移動する患部を精度良く追尾する制御を放射線治療装置に対して行う。
以下においては、放射線投影画像は、診断用X線源24がセンサアレイ32へ向けて照射した放射線により生成された放射線投影画像であるものとする。なお、本発明は、他の対向した線源とセンサアレイを用いても同様に成立する。
本処理フローの事前に、体動運動で殆ど移動しない脊髄などの位置に基づいて、初期設定CT画像データと、当該初期設定CT画像データに更新処理を行った後の再構成CT画像データの座標を位置合わせておく。
まず、放射線治療装置制御装置1は、予めデータベース108に記録されているCT画像データ群の更新処理を行う。当該更新処理においては、CT画像更新部107は、放射線治療装置3に対して患部位置を含む放射線投影画像の撮影を指示する。
すると、診断用X線源24が生体へ放射線を照射し、放射線治療装置制御装置1は、センサアレイ32で検出した信号や、図示しない赤外線センサで取得した赤外線マーカの周期的な動きにおける位相のデータを受信する。上記のとおり、赤外線マーカの周期的な動きの周期及び位相は、呼吸の周期及び位相と対応しており、赤外線マーカの動きに基づいて算出された呼吸位相を利用して、以下に示すように呼吸位相毎のCT画像を作成する。
また、CT画像更新部107では、CT画像データを更新するが、初期値として設定されているCT画像データを初期設定CT画像データと呼び、更新処理によって求めるべきCT画像データまたは当該求めるべきCT画像データを算出する過程のCT画像データを再構成CT画像データと呼ぶ。
図4において、放射線投影画像Eが、CT画像更新部107によって特定された回転角度A1に対応する放射線投影画像を示している。
以下、放射線投影画像Eを、放射線投影画像(呼吸位相p1,回転角度A1)と記載する。
Is(x,y)=Id(x,y)−Ik(x,y)
により表すことができる。つまり差分情報は、放射線投影画像(呼吸位相p1,回転角度A1)とDRR画像(呼吸位相p1,回転角度A1)の各画素の輝度値の差分を示す情報である。ここで、Is(x,y)≠0の場合には、当該座標(x,y)で示される画素に対応するセンサアレイ32の放射線検出素子と、診断用X線源24と、を結ぶ直線L上において、放射線投影画像(呼吸位相p1、回転角度A1)を生成する元となる実際の生体内の情報と、DRR画像(呼吸位相p1、回転角度A1)を生成する元となる再構成CT画像データとで異なっていることを示している。そして、CT画像更新部107は差分情報を生成するとデータベース108に当該差分情報(呼吸位相p1,回転角度A1)を登録する。
図5で示すように、CT画像更新部107は、特定した初期設定CT画像D1’(呼吸位相p1’)の各画素gのうちの1つの画素g1と、初期設定CT画像D2’(呼吸位相p2’)における画素g1に対応する画素g1aとの輝度差の絶対値d1を算出する。また、CT画像更新部107は、初期設定CT画像D1’(呼吸位相p1’)の1つの画素g1と、初期設定CT画像D3’(呼吸位相p3’)における画素g1に対応する画素g1bの輝度差の絶対値d2を算出する。そしてCT画像更新部107は、それら絶対値d1と絶対値d2のうち、大きい値を、当該画素g1の変化量S(t)として特定する(ステップS108)。
また、初期設定CT画像D1’(呼吸位相p1’)の画素g1の輝度値を、D1’(Lx(t),Ly(t),Lz(t))とする。
同様に、初期設定CT画像D2’(呼吸位相p2’)の画素g1aの輝度値を、D2’(Lx(t),Ly(t),Lz(t))とする。
同様に、初期設定CT画像D3’(呼吸位相p3’)の画素g1bの輝度値を、D2’(Lx(t),Ly(t),Lz(t))とする。
すると、変化量S(t)は、下記式(1)により表すことができる。ここで、maxは引数のうち、最大値をとる関数、absは引数の絶対値をとる関数である。このS(t)が再構成CT画像データ中の画素の輝度値の変化のしやすさであり、ここでは、呼吸位相が変化した際の輝度の変化量を輝度の変化のしやすさとみなしている。
以上の説明では、呼吸位相p2’及び呼吸位相p3’の両方を使用しているが、どちらか一方のみを使用しても良い。
ところで、CT画像更新部107は、第1の変化量S(t)の算出処理に代えて、以下の第2の変化量S(t)の算出処理、または第3の変化量S(t)の算出処理を用いることによって変化量S(t)を算出するようにしてもよい。
当該第2の変化量S(t)の算出処理においては、CT画像更新部107は差分情報を読み込んで、当該差分情報においてIs(x,y)≠0である画素を特定する。そして、当該画素に対応するセンサアレイ32上の放射線検出素子と、診断用X線源24と、を結ぶ直線L上に位置すると推定される部分と対応する各画素g1を、更新対象の再構成CT画像データD1において特定する。ここまでの処理は第1の変化量S(t)の算出処理と同じである。また、CT画像更新部107は、呼吸位相p1’の初期設定CT画像D1’をデータベース108から読み取る。また、CT画像更新部107は、呼吸位相がp1と異なる回転角度で生成された放射線投影画像も含め、回転角度が異なる複数の放射線投影画像をデータベース108から読み取る。そして、それら複数の回転角度の異なる放射線投影画像を利用して、CT画像D4を生成する。当該複数の回転角度の異なる放射線投影画像を利用したCT画像の生成処理は公知の技術である。
当該第3の変化量S(t)の算出処理においては、まず、上記第1の変化量S(t)の算出処理、及び第2の変化量S(t)の算出処理を行う。そして、第1の変化量S(t)の算出処理の結果Sa(t)と、第2の変化量S(t)の算出処理の結果Sb(t)とを用いて、
S(t)=αSa(t)+βSb(t)
の式により画素g1の変化量S(t)を算出する。αおよびβは係数であり、例えばα=0.5、β=0.5として算出する。
図6(a)に示すように、第1〜第3の何れかの変化量S(t)の算出処理を終了すると、CT画像更新部107は、全ての画素gについて算出した変化量S(t)の総和(ΣS(t))を算出する。さらに、CT画像更新部107は、その変化量S(t)の総和に対して、直線L上のある部分と対応する1つの画素g1について算出した変化量S(t)の割合(S(t)÷ΣS(t))を算出する。そして、CT画像更新部107は、当該S(t)の割合に、画素zについて算出された差分情報で示される輝度差Isを乗じる。このようにして、当該画素zについて算出された輝度差で示される差分の情報を、CT画像D1の直線L上であると推定された部分と対応する1つの画素g1に配分した値となる輝度更新量候補値を算出する。この輝度更新量候補値をR(x,y,z)とする。この処理を直線L上の全ての画素gについて行なう(ステップS109)。
CT画像更新部107は、再構成CT画像データD1内の輝度更新量候補値が算出された各画素について算出した輝度更新量Dを、対象となる呼吸位相p1の再構成CT画像データD1内の対応する画素の値に加算して、当該再構成CT画像データD1の各画素の値を更新する(ステップS113)。次に、CT画像更新部107は、更新処理後の再構成CT画像データD1と、更新前の再構成CT画像データD1’とを比較する。この比較処理においては、更新処理後の再構成CT画像データD1のある画素と、当該ある画素に対応する更新前の再構成CT画像データD1’の画素の輝度差を、全ての対応する画素について算出し、その総和が閾値未満かを判定する(ステップS114)。そして、閾値未満であれば、CT画像更新部107は、当該更新処理後のCT画像D1により処理終了と判定する。閾値以上である場合には、CT画像更新部107は、ステップS104からの処理を繰り返す。繰り返しの処理においては、更新処理後の再構成CT画像データが利用されることとなる。
図8は患部追尾処理の概要を示す図である。
CT画像データ群の更新処理が終了すると(ステップS201)、ユーザは、任意の呼吸位相または全ての呼吸位相について更新処理されたCT画像において患部の範囲を特定する。当該患部のCT画像中の範囲の情報は、データベース108にCT画像の識別情報に対応付けられて登録される。そしてユーザは、患部位置の特定完了を、放射線治療装置制御装置1へ入力する。なお、任意の呼吸位相について更新処理されたCT画像のみ、患部の範囲の情報がユーザによって特定された場合には、当該患部位置の特定完了の入力を検出した患部位置算出部109は、患部の範囲が特定されていない他の呼吸位相のCT画像において患部の範囲を特定する。そして患部の範囲が特定されたCT画像中の当該患部の範囲の中心の座標の情報を、CT画像の識別情報に対応付けてデータベース108へ登録する。ユーザによって患部の範囲が特定されていない呼吸位相における患部の特定処理では、患部位置算出部109は、ユーザにより選択された患部範囲の画素データをCT画像中から読取り、当該画素データと類似する範囲を、他の位相のCT画像中において検索処理することにより、対象とする呼吸位相のCT画像中の患部の範囲を特定する。そして患部位置算出部109は、それら特定したCT画像中の患部の範囲の中心座標Cを、患部位置として算出する。ユーザにより選択された患部範囲Tの座標の輝度値をc(x,y,z)(但し、(x,y,z)∈T)、他の位相のCT画像中の患部範囲に相当する範囲の画素の輝度値をc’(x,y,z)とすると、
当該患部の追尾処理において放射線投影画像生成部104は、CT画像データ群が生成された際と同じように、放射線治療装置3のカウチ41上の位置に固定された生体の放射線投影画像の生成を開始する。すると、放射線投影画像生成部104は、放射線治療装置3に対して患部位置を含む所定の複数の回転角度の放射線投影画像の撮影を指示する。例えば、当該所定の複数の回転角度を第1回転角度Ai,第2回転角度Ajとする。ここで、当該第1回転角度Ai,第2回転角度Ajは、ステップS202において生成したDRR画像の何れかが示す回転角度に一致した値であるとする。
なお、上述の放射線治療装置制御や放射線治療装置は、内部にコンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
3・・・放射線治療装置
101・・・制御部
102・・・CT画像選択部
103・・・再構成画像生成部
104・・・放射線投影画像生成部
105・・・呼吸位相判定部
106・・・患部追尾処理部
107・・・CT画像更新部
108・・・データベース
109・・・患部位置算出部
Claims (7)
- 線源とセンサアレイとの間に配置された生体に前記線源から放射線を照射して前記生体の患部を治療する放射線治療装置、を制御する放射線治療装置制御装置であって、
前記生体の複数の体動位相ごとに生成されたCT画像データ群の中から、CT画像データを前記複数の体動位相それぞれについて選択するCT画像選択部と、
前記選択されたCT画像データを用いて前記体動位相に応じた再構成画像を、前記線源及び前記センサアレイの回転角度ごとに生成する再構成画像生成部と、
前記回転角度が所定の回転角度である場合に前記放射線を前記線源側から前記センサアレイ側へ照射した際の前記患部を写す放射線投影画像を生成する放射線投影画像生成部と、
前記複数の体動位相ごとの再構成画像と、前記生成した放射線投影画像とを比較して、それら画像を構成する画素の輝度の差分が少ない再構成画像の示す体動位相を、現在の前記生体の体動位相と判定する体動位相判定部と、
前記現在の生体の体動位相の前記CT画像データ群内のCT画像データについて予め算出されている患部の位置を特定し、現在の前記患部の位置と判定する患部追尾処理部と、
を備えることを特徴とする放射線治療装置制御装置。 - 前記放射線投影画像生成部は、複数の前記所定の回転角度についての放射線投影画像を生成し、
前記体動位相判定部は、
前記再構成画像と前記放射線投影画像との比較において、複数の前記所定の回転角度についての同一の体動位相の再構成画像及び放射線投影画像の差分の合計値が最も少ない場合の当該比較に用いた再構成画像の示す体動位相を、現在の前記生体の体動位相と判定する
ことを特徴とする請求項1に記載の放射線治療装置制御装置。 - 前記体動位相判定部は、
前記再構成画像と前記放射線投影画像との比較において、複数の前記所定の回転角度についての同一の体動位相の再構成画像及び放射線投影画像の全画素の輝度差の合計値が最も少ない場合の当該比較に用いた再構成画像の示す体動位相を、現在の前記生体の体動位相と判定する
ことを特徴とする請求項2に記載の放射線治療装置制御装置。 - 前記体動位相判定部は、
前記再構成画像と前記放射線投影画像との比較において、複数の前記所定の回転角度についての同一の体動位相の再構成画像及び放射線投影画像の画素のうち、体動位相が変化した際に輝度変化の大きい画素範囲の輝度差の合計値が最も少ない場合の当該比較に用いた再構成画像の示す体動位相を、現在の前記生体の体動位相と判定する
ことを特徴とする請求項2に記載の放射線治療装置制御装置。 - 体動位相ごとに予め生成されたCT画像データ群の中から、設定された体動位相のCT画像データを、更新対象のCT画像データとして選択し、
前記回転角度それぞれに応じた放射線投影画像を生成し、当該放射線投影画像とこの放射線投影画像の生成時に前記線源及び前記センサアレイを回転させた際の回転角度と前記放射線投影画像の生成時の体動位相とを対応付けて記録し、
前記放射線投影画像の生成時の前記回転角度を検出し、
前記更新対象のCT画像データを、前記検出した回転角度で前記線源側から前記センサアレイ側に投影した場合の再構成画像を生成し、
前記放射線投影画像の各画素と前記生成した再構成画像の各画素とを比較して、それら各画素についての輝度差を示す差分情報を生成し、
前記線源と前記センサアレイの検出素子とを結ぶ直線上の画素を、前記更新対象のCT画像データにおいて特定し、当該特定した画素の輝度値における変化のしやすさと前記差分情報に基づいて、輝度更新量候補値を当該特定した画素それぞれについて算出するとともに、対象とする体動位相に対応する複数の前記回転角度について算出した当該特定した画素それぞれの前記輝度更新量候補値を用いて、当該特定した画素それぞれの輝度更新量を算出し、
前記特定した画素それぞれの輝度更新量を用いて、前記更新対象のCT画像データの対応する各画素の輝度値を更新する
ことを特徴とする請求項1から請求項4の何れか一項に記載の放射線治療装置制御装置。 - 線源とセンサアレイとの間に配置された生体に前記線源から放射線を照射して前記生体の患部を治療する放射線治療装置、を制御する放射線治療装置制御装置の処理方法であって、
前記生体の複数の体動位相ごとに生成されたCT画像データ群の中から、CT画像データを前記複数の体動位相それぞれについて選択し、
前記選択されたCT画像データを用いて前記体動位相に応じた再構成画像を、前記線源及び前記センサアレイの回転角度ごとに生成し、
前記回転角度が所定の回転角度である場合に前記放射線を前記線源側から前記センサアレイ側へ照射した際の前記患部を写す放射線投影画像を生成し、
前記複数の体動位相ごとの再構成画像と、前記生成した放射線投影画像とを比較して、それら画像を構成する画素の輝度の差分が少ない再構成画像の示す体動位相を、現在の前記生体の体動位相と判定し、
前記現在の生体の体動位相の前記CT画像データ群内のCT画像データについて予め算出されている患部の位置を特定し、現在の前記患部の位置と判定する
ことを特徴とする処理方法。 - 線源とセンサアレイとの間に配置された生体に前記線源から放射線を照射して前記生体の患部を治療する放射線治療装置、を制御する放射線治療装置制御装置のコンピュータを、
前記生体の複数の体動位相ごとに生成されたCT画像データ群の中から、CT画像データを前記複数の体動位相それぞれについて選択するCT画像選択手段、
前記選択されたCT画像データを用いて前記体動位相に応じた再構成画像を、前記線源及び前記センサアレイの回転角度ごとに生成する再構成画像生成手段、
前記回転角度が所定の回転角度である場合に前記放射線を前記線源側から前記センサアレイ側へ照射した際の前記患部を写す放射線投影画像を生成する放射線投影画像生成手段、
前記複数の体動位相ごとの再構成画像と、前記生成した放射線投影画像とを比較して、それら画像を構成する画素の輝度の差分が少ない再構成画像の示す体動位相を、現在の前記生体の体動位相と判定する体動位相判定手段、
前記現在の生体の体動位相の前記CT画像データ群内のCT画像データについて予め算出されている患部の位置を特定し、現在の前記患部の位置と判定する患部追尾処理手段、
として機能させることを特徴とするプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011061024A JP5575022B2 (ja) | 2011-03-18 | 2011-03-18 | 放射線治療装置制御装置、その処理方法、及びプログラム |
| CN201180060994.0A CN103269752B (zh) | 2011-03-18 | 2011-10-24 | 放射线治疗装置控制装置及其处理方法 |
| US13/994,986 US9393445B2 (en) | 2011-03-18 | 2011-10-24 | Radiation therapy device controller, processing method and program for same |
| PCT/JP2011/074395 WO2012127724A1 (ja) | 2011-03-18 | 2011-10-24 | 放射線治療装置制御装置、その処理方法、及びプログラム |
| EP11861482.5A EP2662115B1 (en) | 2011-03-18 | 2011-10-24 | Control device for radiation therapy device and programme for same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011061024A JP5575022B2 (ja) | 2011-03-18 | 2011-03-18 | 放射線治療装置制御装置、その処理方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012196260A true JP2012196260A (ja) | 2012-10-18 |
| JP5575022B2 JP5575022B2 (ja) | 2014-08-20 |
Family
ID=46878914
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011061024A Active JP5575022B2 (ja) | 2011-03-18 | 2011-03-18 | 放射線治療装置制御装置、その処理方法、及びプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9393445B2 (ja) |
| EP (1) | EP2662115B1 (ja) |
| JP (1) | JP5575022B2 (ja) |
| CN (1) | CN103269752B (ja) |
| WO (1) | WO2012127724A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014175608A1 (ko) * | 2013-04-26 | 2014-10-30 | 재단법인 아산사회복지재단 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| KR101464330B1 (ko) * | 2013-04-26 | 2014-11-24 | 서울대학교병원 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| US8965096B2 (en) | 2011-03-18 | 2015-02-24 | Mitsubishi Heavy Industries, Ltd. | Radiation therapy device controller, processing method and program for same |
| KR101513229B1 (ko) | 2013-04-26 | 2015-04-20 | 서울대학교병원 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| JP2016516508A (ja) * | 2013-04-18 | 2016-06-09 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | リアルタイム磁気共鳴モニタリング付き放射線治療システム |
| JP2016131737A (ja) * | 2015-01-20 | 2016-07-25 | 国立大学法人北海道大学 | 放射線治療システムおよび放射線治療プログラム |
| JP2018500086A (ja) * | 2014-12-10 | 2018-01-11 | エレクタ、インク.Elekta, Inc. | 磁気共鳴投影イメージング |
| JP2019500114A (ja) * | 2015-12-16 | 2019-01-10 | ブレインラボ アーゲー | 位置合わせ精度の決定 |
| CN109419518A (zh) * | 2017-08-24 | 2019-03-05 | 通用电气公司 | 用于对患者成像的系统和方法 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6106259B2 (ja) * | 2012-03-21 | 2017-03-29 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 医用イメージングと生検データとを統合する臨床ワークステーション及びこれを使用する方法 |
| CN104220132B (zh) * | 2013-02-28 | 2017-05-24 | 深圳市奥沃医学新技术发展有限公司 | 一种呼吸跟踪装置及放射治疗系统 |
| JP6351017B2 (ja) * | 2014-02-24 | 2018-07-04 | 国立研究開発法人量子科学技術研究開発機構 | 放射線治療用動体追跡装置、放射線治療用照射領域決定装置および放射線治療装置 |
| DE102015215584B4 (de) * | 2015-08-14 | 2022-03-03 | Siemens Healthcare Gmbh | Verfahren und System zur Rekonstruktion von Planungsbildern |
| JP6668902B2 (ja) * | 2016-04-12 | 2020-03-18 | 株式会社島津製作所 | 位置決め装置および位置決め装置の作動方法 |
| JP6744123B2 (ja) * | 2016-04-26 | 2020-08-19 | 株式会社日立製作所 | 動体追跡装置および放射線照射システム |
| JP6851750B2 (ja) * | 2016-08-30 | 2021-03-31 | キヤノン株式会社 | 放射線撮影装置、放射線撮影システム、放射線撮影方法、及びプログラム |
| US11793579B2 (en) | 2017-02-22 | 2023-10-24 | Covidien Lp | Integration of multiple data sources for localization and navigation |
| US10434335B2 (en) * | 2017-03-30 | 2019-10-08 | Shimadzu Corporation | Positioning apparatus and method of positioning by generation of DRR image from X-ray CT image data |
| JP7098288B2 (ja) * | 2017-08-07 | 2022-07-11 | キヤノン株式会社 | 放射線撮像システム |
| JP7553040B2 (ja) * | 2017-12-20 | 2024-09-18 | 国立研究開発法人量子科学技術研究開発機構 | 医用装置、医用装置の制御方法、およびプログラム |
| WO2019140637A1 (zh) * | 2018-01-19 | 2019-07-25 | 深圳市奥沃医学新技术发展有限公司 | 摆位方法、装置及放射治疗系统 |
| US11113814B2 (en) | 2018-02-08 | 2021-09-07 | Apn Health, Llc | Determining respiratory phase from fluoroscopic images |
| US10489911B2 (en) * | 2018-02-08 | 2019-11-26 | Apn Health, Llc | Determining respiratory phase from fluoroscopic images |
| JP6985314B2 (ja) * | 2019-02-25 | 2021-12-22 | 株式会社日立製作所 | 放射線治療装置および放射線治療装置の制御方法 |
| CN117729889A (zh) * | 2021-10-15 | 2024-03-19 | 株式会社东芝 | 摄影控制系统以及摄影控制方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5901199A (en) * | 1996-07-11 | 1999-05-04 | The Board Of Trustees Of The Leland Stanford Junior University | High-speed inter-modality image registration via iterative feature matching |
| JP2003117010A (ja) * | 2001-08-09 | 2003-04-22 | Mitsubishi Electric Corp | 放射線治療装置、並びにプログラム及び該プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2008514352A (ja) * | 2004-09-30 | 2008-05-08 | アキュレイ インコーポレイテッド | 運動中の標的の動的追跡 |
| JP2008154861A (ja) * | 2006-12-25 | 2008-07-10 | Univ Of Tokyo | 放射線治療システム |
| JP2010246883A (ja) * | 2009-03-27 | 2010-11-04 | Mitsubishi Electric Corp | 患者位置決めシステム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5907594A (en) | 1997-07-01 | 1999-05-25 | Analogic Corporation | Reconstruction of volumetric images by successive approximation in cone-beam computed tomography systems |
| US20030128801A1 (en) * | 2002-01-07 | 2003-07-10 | Multi-Dimensional Imaging, Inc. | Multi-modality apparatus for dynamic anatomical, physiological and molecular imaging |
| US7457655B2 (en) * | 2004-10-08 | 2008-11-25 | Mayo Foundation For Medical Education And Research | Motion correction of magnetic resonance images using moments of spatial projections |
| US8073104B2 (en) | 2006-05-25 | 2011-12-06 | William Beaumont Hospital | Portal and real time imaging for treatment verification |
| JP4126318B2 (ja) | 2006-06-23 | 2008-07-30 | 三菱重工業株式会社 | 放射線治療装置制御装置および放射線治療装置の制御方法 |
| JP4444338B2 (ja) | 2008-01-30 | 2010-03-31 | 三菱重工業株式会社 | 放射線治療装置制御装置および放射線照射方法 |
| JP5611091B2 (ja) | 2011-03-18 | 2014-10-22 | 三菱重工業株式会社 | 放射線治療装置制御装置、その処理方法、及びプログラム |
-
2011
- 2011-03-18 JP JP2011061024A patent/JP5575022B2/ja active Active
- 2011-10-24 US US13/994,986 patent/US9393445B2/en active Active
- 2011-10-24 EP EP11861482.5A patent/EP2662115B1/en active Active
- 2011-10-24 WO PCT/JP2011/074395 patent/WO2012127724A1/ja not_active Ceased
- 2011-10-24 CN CN201180060994.0A patent/CN103269752B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5901199A (en) * | 1996-07-11 | 1999-05-04 | The Board Of Trustees Of The Leland Stanford Junior University | High-speed inter-modality image registration via iterative feature matching |
| JP2003117010A (ja) * | 2001-08-09 | 2003-04-22 | Mitsubishi Electric Corp | 放射線治療装置、並びにプログラム及び該プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2008514352A (ja) * | 2004-09-30 | 2008-05-08 | アキュレイ インコーポレイテッド | 運動中の標的の動的追跡 |
| JP2008154861A (ja) * | 2006-12-25 | 2008-07-10 | Univ Of Tokyo | 放射線治療システム |
| JP2010246883A (ja) * | 2009-03-27 | 2010-11-04 | Mitsubishi Electric Corp | 患者位置決めシステム |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8965096B2 (en) | 2011-03-18 | 2015-02-24 | Mitsubishi Heavy Industries, Ltd. | Radiation therapy device controller, processing method and program for same |
| JP2016516508A (ja) * | 2013-04-18 | 2016-06-09 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | リアルタイム磁気共鳴モニタリング付き放射線治療システム |
| WO2014175608A1 (ko) * | 2013-04-26 | 2014-10-30 | 재단법인 아산사회복지재단 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| KR101464330B1 (ko) * | 2013-04-26 | 2014-11-24 | 서울대학교병원 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| KR101513229B1 (ko) | 2013-04-26 | 2015-04-20 | 서울대학교병원 | 수술전 호흡 레벨과 수술장 호흡 레벨을 비교하는 방법 |
| JP2018500086A (ja) * | 2014-12-10 | 2018-01-11 | エレクタ、インク.Elekta, Inc. | 磁気共鳴投影イメージング |
| US10791958B2 (en) | 2014-12-10 | 2020-10-06 | Elekta, Inc. | Magnetic resonance projection imaging |
| US11064899B2 (en) | 2014-12-10 | 2021-07-20 | Elekta, Inc. | Magnetic resonance projection for constructing four-dimensional image information |
| JP2016131737A (ja) * | 2015-01-20 | 2016-07-25 | 国立大学法人北海道大学 | 放射線治療システムおよび放射線治療プログラム |
| JP2019500114A (ja) * | 2015-12-16 | 2019-01-10 | ブレインラボ アーゲー | 位置合わせ精度の決定 |
| CN109419518A (zh) * | 2017-08-24 | 2019-03-05 | 通用电气公司 | 用于对患者成像的系统和方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103269752B (zh) | 2015-11-25 |
| CN103269752A (zh) | 2013-08-28 |
| WO2012127724A1 (ja) | 2012-09-27 |
| US20130274539A1 (en) | 2013-10-17 |
| EP2662115A1 (en) | 2013-11-13 |
| EP2662115B1 (en) | 2015-08-26 |
| JP5575022B2 (ja) | 2014-08-20 |
| EP2662115A4 (en) | 2014-07-16 |
| US9393445B2 (en) | 2016-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5575022B2 (ja) | 放射線治療装置制御装置、その処理方法、及びプログラム | |
| JP5611091B2 (ja) | 放射線治療装置制御装置、その処理方法、及びプログラム | |
| JP5934230B2 (ja) | 標的の部分的移動範囲を治療するための方法および装置 | |
| EP3407791B1 (en) | Presenting a sequence of images associated with a motion model | |
| JP6181459B2 (ja) | 放射線治療システム | |
| US10143431B2 (en) | Medical image processing apparatus and method, and radiotherapeutic apparatus | |
| JP2019524418A (ja) | 回転撮像及び追跡システムにおけるオンライン角度選択 | |
| US9149654B2 (en) | Radiotherapy device controller and method of measuring position of specific-part | |
| JP2019528149A (ja) | 回転撮像及び追跡システムにおけるオンライン角度選択 | |
| JP2007236729A (ja) | 放射線治療装置制御装置および放射線照射方法 | |
| US9517036B2 (en) | Radiation imaging using very slow rotational technique | |
| US9393444B2 (en) | Treatment planning device, treatment planning method, and program therefor | |
| US8682414B2 (en) | Radiation therapy apparatus control method and radiation therapy apparatus controller | |
| US9844685B2 (en) | Radiotherapy equipment control device, radiotherapy equipment control method, and program executed by computer for radiotherapy equipment | |
| JP6310118B2 (ja) | 画像処理装置、治療システム及び画像処理方法 | |
| JP7311859B2 (ja) | 動体追跡装置とそれを備えた放射線治療システム、プログラム、および動体の追跡方法 | |
| WO2024117129A1 (ja) | 医用画像処理装置、治療システム、医用画像処理方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140701 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5575022 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |