JP2012202958A - 騒音源同定システム - Google Patents
騒音源同定システム Download PDFInfo
- Publication number
- JP2012202958A JP2012202958A JP2011070677A JP2011070677A JP2012202958A JP 2012202958 A JP2012202958 A JP 2012202958A JP 2011070677 A JP2011070677 A JP 2011070677A JP 2011070677 A JP2011070677 A JP 2011070677A JP 2012202958 A JP2012202958 A JP 2012202958A
- Authority
- JP
- Japan
- Prior art keywords
- sound
- source
- vehicle
- noise
- calculation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005236 sound signal Effects 0.000 claims abstract description 41
- 238000001514 detection method Methods 0.000 claims abstract description 31
- 238000005259 measurement Methods 0.000 claims abstract description 9
- 238000012937 correction Methods 0.000 claims description 28
- 238000000605 extraction Methods 0.000 claims description 16
- 238000000034 method Methods 0.000 description 17
- 238000000610 breath-figure templating Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 3
- 241000791900 Selene vomer Species 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 235000010724 Wisteria floribunda Nutrition 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images










Landscapes
- Details Of Audible-Bandwidth Transducers (AREA)
- Obtaining Desirable Characteristics In Audible-Bandwidth Transducers (AREA)
- Circuit For Audible Band Transducer (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
【解決手段】 ビームフォーミングによる音源計測用と音響インテンシティによる音源計測用に配列された複数のマイクロホンからなるマイクロホンアレイ20と、車両通行路の脇に設置され、マイクロホンアレイ20を、車両通行路を睨むように斜め下を向いた姿勢に支持する支持台10と、車両通行路を走行する車両から発せられた音をマイクロホンアレイ20で受音することにより得られた原音信号に基づいて車両通行路上の騒音源を検出する騒音源検出装置とを備えた。
【選択図】 図3
Description
ビームフォーミングによる音源計測用と音響インテンシティによる音源計測用に配列された複数のマイクロホンからなるマイクロホンアレイと、
車両通行路の脇に設置され、マイクロホンアレイを、車両通行路を睨むように斜め下を向いた姿勢に支持する支持台と、
車両通行路を走行する車両から発せられた音をマイクロホンアレイで受音することにより得られた原音信号に基づいて車両通行路上の騒音源を検出する騒音源検出装置とを備えたことを特徴とする。
原音信号から、騒音帯域内のうちの高周波抽出対象音域の音成分を表わす第1の音信号および騒音帯域内のうちの低周波抽出対象音域の音成分を表わす第2の音信号をそれぞれ抽出する高周波音域抽出フィルタおよび低周波音域抽出フィルタと、
第1の音信号に基づくビームフォーミング演算により車両通行路上の音源位置および音圧を算出する第1の音源算出部と、
第2の音信号に基づく音響インテンシティ演算により車両通行路上の音源位置および音圧を算出する第2の音源算出部と、
第1の音源算出部および第2の音源算出部で算出された音圧をマイクロホンアレイと車両通行路上の音源位置との間の距離に応じて補正する音圧補正部と、
第1の音源算出部および第2の音源算出部により算出された音源位置および音圧補正部により補正された音圧に基づいて、車両通行路上の騒音源を検出する騒音源検出部とを有することが好ましい。

P0=P/m2 ・・・(8)
と補正される。この補正された音圧P0は、その音源が1[m]の距離に存在する場合の音圧を表わしている。
11 車輪
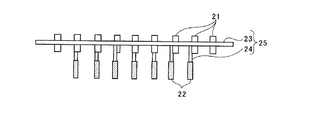
20 マイクロホンアレイ
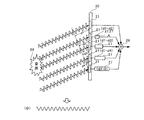
21,22,ch1,ch2,ch3,ch4 マイクロホン
23 支持具
24 支持棒
25 フレーム
26 加算器
27 遅延器
29 音源
50 騒音源検出装置
51 高周波音域抽出フィルタ
52 低周波音域抽出フィルタ
53 第1の音源算出部
54 第2の音源算出部
55 音圧補正部
56 騒音源検出部
100 車道
Claims (4)
- ビームフォーミングによる音源計測用と音響インテンシティによる音源計測用に配列された複数のマイクロホンからなるマイクロホンアレイと、
車両通行路の脇に設置され、前記マイクロホンアレイを、該車両通行路を睨むように斜め下を向いた姿勢に支持する支持台と、
前記車両通行路を走行する車両から発せられた音を前記マイクロホンアレイで受音することにより得られた原音信号に基づいて該車両通行路上の騒音源を検出する騒音源検出装置とを備えたことを特徴とする騒音源同定システム。 - 前記支持台が、車両通行路脇への設置および撤収が自在なものであることを特徴とする請求項1記載の騒音源同定システム。
- 前記騒音源検出装置が、
前記原音信号から、騒音帯域内のうちの高周波抽出対象音域の音成分を表わす第1の音信号および騒音帯域内のうちの低周波抽出対象音域の音成分を表わす第2の音信号をそれぞれ抽出する高周波音域抽出フィルタおよび低周波音域抽出フィルタと、
前記第1の音信号に基づくビームフォーミング演算により前記車両通行路上の音源位置および音圧を算出する第1の音源算出部と、
前記第2の音信号に基づく音響インテンシティ演算により前記車両通行路上の音源位置および音圧を算出する第2の音源算出部と、
前記第1の音源算出部および前記第2の音源算出部で算出された音圧を前記マイクロホンアレイと前記車両通行路上の音源位置との間の距離に応じて補正する音圧補正部と、
前記第1の音源算出部および前記第2の音源算出部により算出された音源位置および前記音圧補正部により補正された音圧に基づいて、前記車両通行路上の騒音源を検出する騒音源検出部とを有することを特徴とする請求項1又は2記載の騒音源同定システム。 - 前記騒音源検出部が、前記第1の音源算出部および前記第2の音源算出部により位置が算出された音源のうちの、前記音圧補正部による補正後の音圧であって、かつ前記第1の音源算出部および前記第2の音源算出部のそれぞれで算出されて互いに加算された音圧が閾値音圧を越える音圧である音源を、騒音源として検出するものであることを特徴とする請求項3記載の騒音源同定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011070677A JP2012202958A (ja) | 2011-03-28 | 2011-03-28 | 騒音源同定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011070677A JP2012202958A (ja) | 2011-03-28 | 2011-03-28 | 騒音源同定システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012202958A true JP2012202958A (ja) | 2012-10-22 |
Family
ID=47184104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011070677A Pending JP2012202958A (ja) | 2011-03-28 | 2011-03-28 | 騒音源同定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012202958A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015227873A (ja) * | 2014-05-31 | 2015-12-17 | ザ・ボーイング・カンパニーTheBoeing Company | 適応開口フェーズドアレイを用いたノイズソース分解システム及び方法 |
| JP2017067666A (ja) * | 2015-09-30 | 2017-04-06 | パナソニックIpマネジメント株式会社 | 物体検出装置、物体検出システム、及び物体検出方法 |
| JP2017158030A (ja) * | 2016-03-01 | 2017-09-07 | パナソニックIpマネジメント株式会社 | マイクアレイシステム及びマイクアレイシステムの製造方法 |
| WO2019189484A1 (ja) * | 2018-03-28 | 2019-10-03 | 日本電産株式会社 | マイクロホンアレイおよび音響解析システム |
| JP2020101447A (ja) * | 2018-12-21 | 2020-07-02 | 独立行政法人自動車技術総合機構 | 車両音評価システム、及び車両音評価装置 |
| WO2022107507A1 (ja) * | 2020-11-19 | 2022-05-27 | 株式会社ジェイテクト | 監視装置、集音装置及び監視方法 |
| CN116973841A (zh) * | 2023-07-28 | 2023-10-31 | 中检西部检测有限公司 | 一种摩托车噪声检测定位方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04331393A (ja) * | 1991-05-02 | 1992-11-19 | Mitsui Eng & Shipbuild Co Ltd | 移動音源の音源探査装置 |
| JPH11271140A (ja) * | 1998-03-26 | 1999-10-05 | Isuzu Motors Ltd | 伝達特性測定装置 |
| JP2001330595A (ja) * | 2000-05-24 | 2001-11-30 | Mitsubishi Electric Corp | 打音検査装置 |
| JP2002008189A (ja) * | 2000-06-22 | 2002-01-11 | Matsushita Electric Ind Co Ltd | 車両検出装置および車両検出方法 |
| JP2008061137A (ja) * | 2006-09-01 | 2008-03-13 | Canon Inc | 音響再生装置及びその制御方法 |
| JP2010266399A (ja) * | 2009-05-18 | 2010-11-25 | Ono Sokki Co Ltd | 音源同定装置および音源同定プログラム |
-
2011
- 2011-03-28 JP JP2011070677A patent/JP2012202958A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04331393A (ja) * | 1991-05-02 | 1992-11-19 | Mitsui Eng & Shipbuild Co Ltd | 移動音源の音源探査装置 |
| JPH11271140A (ja) * | 1998-03-26 | 1999-10-05 | Isuzu Motors Ltd | 伝達特性測定装置 |
| JP2001330595A (ja) * | 2000-05-24 | 2001-11-30 | Mitsubishi Electric Corp | 打音検査装置 |
| JP2002008189A (ja) * | 2000-06-22 | 2002-01-11 | Matsushita Electric Ind Co Ltd | 車両検出装置および車両検出方法 |
| JP2008061137A (ja) * | 2006-09-01 | 2008-03-13 | Canon Inc | 音響再生装置及びその制御方法 |
| JP2010266399A (ja) * | 2009-05-18 | 2010-11-25 | Ono Sokki Co Ltd | 音源同定装置および音源同定プログラム |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015227873A (ja) * | 2014-05-31 | 2015-12-17 | ザ・ボーイング・カンパニーTheBoeing Company | 適応開口フェーズドアレイを用いたノイズソース分解システム及び方法 |
| JP2017067666A (ja) * | 2015-09-30 | 2017-04-06 | パナソニックIpマネジメント株式会社 | 物体検出装置、物体検出システム、及び物体検出方法 |
| WO2017056380A1 (ja) * | 2015-09-30 | 2017-04-06 | パナソニックIpマネジメント株式会社 | 物体検出装置、物体検出システム、及び物体検出方法 |
| JP2017158030A (ja) * | 2016-03-01 | 2017-09-07 | パナソニックIpマネジメント株式会社 | マイクアレイシステム及びマイクアレイシステムの製造方法 |
| WO2019189484A1 (ja) * | 2018-03-28 | 2019-10-03 | 日本電産株式会社 | マイクロホンアレイおよび音響解析システム |
| JP2020101447A (ja) * | 2018-12-21 | 2020-07-02 | 独立行政法人自動車技術総合機構 | 車両音評価システム、及び車両音評価装置 |
| JP7221518B2 (ja) | 2018-12-21 | 2023-02-14 | 独立行政法人自動車技術総合機構 | 車両音評価システム、及び車両音評価装置 |
| WO2022107507A1 (ja) * | 2020-11-19 | 2022-05-27 | 株式会社ジェイテクト | 監視装置、集音装置及び監視方法 |
| JP2022081152A (ja) * | 2020-11-19 | 2022-05-31 | 株式会社ジェイテクト | 監視装置、集音装置及び監視方法 |
| JP7559521B2 (ja) | 2020-11-19 | 2024-10-02 | 株式会社ジェイテクト | 監視装置、集音装置及び監視方法 |
| CN116973841A (zh) * | 2023-07-28 | 2023-10-31 | 中检西部检测有限公司 | 一种摩托车噪声检测定位方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5489531B2 (ja) | 音源同定装置および音源同定プログラム | |
| JP2012202958A (ja) | 騒音源同定システム | |
| CN111480055B (zh) | 带电声转换器的wim传感器 | |
| ES2561877T3 (es) | Sistema y procedimiento para la detección precoz de trenes | |
| JP5579785B2 (ja) | 層厚測定装置を有する道路舗装機及び敷設材料の層厚を決定する方法 | |
| JP7089954B2 (ja) | 建設車両の障害物検知装置 | |
| JP6385911B2 (ja) | 検出システム、情報処理装置、および検出方法 | |
| CN102032883B (zh) | 臂架碰撞检测系统及检测臂架与障碍物碰撞的方法 | |
| CN203479672U (zh) | 分体式汽车尾气遥感测试装置 | |
| JP2016120892A (ja) | 立体物検出装置、立体物検出方法および立体物検出プログラム | |
| KR102183224B1 (ko) | 차량 레이더 오차 보정 시스템 및 그 방법 | |
| WO2015072468A1 (ja) | 凹凸分析プログラム、凹凸分析方法、および凹凸分析装置 | |
| KR101624954B1 (ko) | 이동식 다차선 기준검지기 | |
| JP2012173254A (ja) | 検測方法及び装置 | |
| JP6847677B2 (ja) | 負圧波発生装置 | |
| US20200018729A1 (en) | Detection system, detection device, and detection method | |
| US12505824B2 (en) | Active noise cancelling system and method for exterior noise reduction | |
| JP2018165731A (ja) | 検出装置の配置方法 | |
| JP6396647B2 (ja) | 障害物検知装置及び障害物検知方法 | |
| US7034716B2 (en) | Passive real-time vehicle classification system utilizing unattended ground sensors | |
| JP2012146149A (ja) | 死角車両検知システム、死角車両検知装置、死角車両検知方法およびそのプログラム | |
| JP2544535B2 (ja) | 移動音源の計測装置及び計測方法 | |
| CN115188200A (zh) | 一种车辆识别方法、装置、电子设备及存储介质 | |
| JP6266371B2 (ja) | 音源探査システム | |
| KR102200723B1 (ko) | 차량 주행 소음을 활용한 교통정보 산출 시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110406 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110415 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110603 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130604 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140603 |