JP2012205348A - 磁気ギア - Google Patents
磁気ギア Download PDFInfo
- Publication number
- JP2012205348A JP2012205348A JP2011065841A JP2011065841A JP2012205348A JP 2012205348 A JP2012205348 A JP 2012205348A JP 2011065841 A JP2011065841 A JP 2011065841A JP 2011065841 A JP2011065841 A JP 2011065841A JP 2012205348 A JP2012205348 A JP 2012205348A
- Authority
- JP
- Japan
- Prior art keywords
- speed rotor
- low
- stator
- magnetic
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Dynamo-Electric Clutches, Dynamo-Electric Brakes (AREA)
Abstract
【課題】トルク伝達効率が向上された磁気ギアを得る。
【解決手段】磁気ギアは、高速回転子、低速回転子、及び、上記高速回転子と上記低速回転子とに対して空隙を隔てて向き合う固定子を備え、上記高速回転子または上記低速回転子の起磁力を変調することにより、回転速度を変化させてトルクを伝達する磁気ギアにおいて、上記固定子の極対数は、上記低速回転子の極対数と上記高速回転子の極対数の和であり、上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、0.5を超え、且つ0.58未満である。
【選択図】図1
【解決手段】磁気ギアは、高速回転子、低速回転子、及び、上記高速回転子と上記低速回転子とに対して空隙を隔てて向き合う固定子を備え、上記高速回転子または上記低速回転子の起磁力を変調することにより、回転速度を変化させてトルクを伝達する磁気ギアにおいて、上記固定子の極対数は、上記低速回転子の極対数と上記高速回転子の極対数の和であり、上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、0.5を超え、且つ0.58未満である。
【選択図】図1
Description
この発明は、回転数を増速または減速して回転動力を伝達する磁気ギアに関するものである。
磁気ギアは、機械的な歯車を用いず、一方の回転子が発生する起磁力を固定子磁極で変調することにより他方の回転子に異なる波形の起磁力を与え、これにより速度の異なる回転動力を伝達する。
そして、磁気ギアの1種であるラジアル型磁気ギアは、高速回転子を中央に配置し、低速回転子を外側に配置し、高速回転子と低速回転子の間に複数の磁極片からなる固定子を配置している。高速回転子の表面および低速回転子の表面に永久磁石を固定し、この起磁力を固定子磁極片で変調することにより、速度の異なる回転動力を伝達している(例えば、非特許文献1参照)。
そして、磁気ギアの1種であるラジアル型磁気ギアは、高速回転子を中央に配置し、低速回転子を外側に配置し、高速回転子と低速回転子の間に複数の磁極片からなる固定子を配置している。高速回転子の表面および低速回転子の表面に永久磁石を固定し、この起磁力を固定子磁極片で変調することにより、速度の異なる回転動力を伝達している(例えば、非特許文献1参照)。
また、磁気ギアの他の1種であるタンデム型磁気ギアは、固定子の磁極片が回転子の外側にあり、固定子の磁極片に軸方向に磁束を通すことで変調するタイプであり、高速回転子の作る起磁力を固定子磁極片で変調してできた空間起磁力分布のうち、低速回転子が作る起磁力と等しい空間高調波成分のみが回転動力を作ることになる。逆も同様であり、低速回転子の作る起磁力を固定子磁極片で変調してできた空間起磁力分布のうち、高速回転子が作る起磁力と等しい空間高調波成分のみが回転動力を作ることになる(例えば、非特許文献2参照)。
N.W.Frank、他1名、「Gearing Ratios of a Magnetic Gear for Wind Turbines」、Electric Machines and Drives Conference,2009、IEMDC、2009、May、p.1224−1230
Li Yong、他3名、「Principle and Simulation Analysis of a Novel Structure Magnetic Gear」、Electrical Machines and Systems、2008.ICEMS 2008.International Conference on、2008、October、p.3845−3849
上述した動作原理で回転速度を変化させてトルクを伝達するため、低速回転子が作る起磁力、または高速回転子が作る起磁力のうち多くはトルクに寄与しない成分となってしまうため、トルク密度向上が課題であった。
また、磁極片で構成される固定子については、塊状磁極で構成されていれば、変動磁束による渦電流損失が大きくなり、やはりトルク密度を低下させるという問題点があった。 このため、固定子磁極片を積層鋼板で構成した場合、軸方向に積層すれば、その固定方法が容易ではなく信頼性を損ねるという問題点があった。
また、磁極片で構成される固定子については、塊状磁極で構成されていれば、変動磁束による渦電流損失が大きくなり、やはりトルク密度を低下させるという問題点があった。 このため、固定子磁極片を積層鋼板で構成した場合、軸方向に積層すれば、その固定方法が容易ではなく信頼性を損ねるという問題点があった。
この発明は、前記のような課題を解決するためになされたものであり、トルク伝達効率が向上された磁気ギアを得ることが目的である。
この発明に係る磁気ギアは、高速回転子、低速回転子、及び、上記高速回転子と上記低速回転子とに対して空隙を隔てて向き合う固定子を備え、上記高速回転子または上記低速回転子の起磁力を変調することで、回転速度を変化させてトルクを伝達する磁気ギアにおいて、上記固定子の極対数が上記低速回転子の極対数と上記高速回転子の極対数の和であり、上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比が0.5を超え、且つ0.58未満である。
この発明に係る磁気ギアは、固定子の磁極片の高速側磁極幅と高速側ピッチとの比と、低速側磁極幅と低速側ピッチとの比が、固定子の極対数が低速回転子の極対数と高速回転子の極対数の和であるときには、0.5を超え、且つ0.58未満であり、固定子の極対数が低速回転子の極対数と高速回転子の極対数の差であるときには、0.42を超え、且つ0.5未満であるので、有効透過磁束が大きくなり、従って発生トルクが大きくなるという臨界的な効果を奏することができる。
以下、本発明の磁気ギアの好適な実施の形態につき図面を用いて説明する。
実施の形態1.
図1は、この発明の実施の形態1に係る磁気ギアの断面図である。
この発明の実施の形態1に係る磁気ギア1は、ラジアル型であり、高速回転子2が中心に配置され、低速回転子3が外側に配置され、高速回転子2と低速回転子3の間に複数の磁極片4からなる固定子5が空隙6を介して配置されている。
高速回転子2は、回転自在に支持される軸7と、軸7により軸支された円筒状のコア8と、コア8の外側面に周方向に並べられて固定された複数の永久磁石9とから構成される。
低速回転子3は、外側面が回転自在に支持される円筒状のコア11と、コア11の内側面に周方向に並べられて固定された複数の永久磁石12とから構成される。
そして、高速回転子2と低速回転子3のそれぞれの永久磁石9、12の数は、高速回転子2の方が低速回転子3より少なく、高速回転子2からは少極の起磁力が発生し、低速回転子3からは多極の起磁力が発生する。
固定子5は、周方向に磁極片4と非磁性片13が交互に円筒状に並べられたものである。1つの磁極片4は、鋼板が積層され、積層された複数枚の鋼板が非磁性片13により固定される。
実施の形態1.
図1は、この発明の実施の形態1に係る磁気ギアの断面図である。
この発明の実施の形態1に係る磁気ギア1は、ラジアル型であり、高速回転子2が中心に配置され、低速回転子3が外側に配置され、高速回転子2と低速回転子3の間に複数の磁極片4からなる固定子5が空隙6を介して配置されている。
高速回転子2は、回転自在に支持される軸7と、軸7により軸支された円筒状のコア8と、コア8の外側面に周方向に並べられて固定された複数の永久磁石9とから構成される。
低速回転子3は、外側面が回転自在に支持される円筒状のコア11と、コア11の内側面に周方向に並べられて固定された複数の永久磁石12とから構成される。
そして、高速回転子2と低速回転子3のそれぞれの永久磁石9、12の数は、高速回転子2の方が低速回転子3より少なく、高速回転子2からは少極の起磁力が発生し、低速回転子3からは多極の起磁力が発生する。
固定子5は、周方向に磁極片4と非磁性片13が交互に円筒状に並べられたものである。1つの磁極片4は、鋼板が積層され、積層された複数枚の鋼板が非磁性片13により固定される。
高速回転子2の極対数NH、低速回転子3の極対数NL、固定子5の磁極数NSは、式(1)の関係を満足するように設定している。従って、高速回転子2の速度は低速回転子3の速度のNL/NH倍となる。式(1)において、+は低速回転子3と高速回転子2が逆方向に回転し、−は低速回転子3と高速回転子2が同方向に回転する。
NS=NL±NH (1)
低速回転子3または高速回転子2が外部動力により回転力を与えられることにより、外部動力が与えられていない高速回転子2または低速回転子3に速度を変調されたトルクが伝達する。
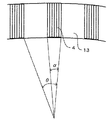
固定子5の磁極片4の低速回転子3に面するピッチを軸7の中心から見た頂角(以下、低速側ピッチと称す。)θL、磁極片4の高速回転子2に面するピッチを軸7の中心から見た頂角(以下、高速側ピッチと称す。)θH、磁極片4の低速回転子3に面する磁極幅を軸7の中心から見た頂角(以下、低速側磁極幅と称す。)αL、磁極片4の高速回転子2に面する磁極幅を軸7の中心から見た頂角(以下、高速側磁極幅と称す。)αHと表し、固定子5の磁極数NSが低速回転子3の極対数NLと高速回転子2の極対数NHの和の場合、高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLが、式(2)を満たしている。
固定子5の磁極片4の低速回転子3に面するピッチを軸7の中心から見た頂角(以下、低速側ピッチと称す。)θL、磁極片4の高速回転子2に面するピッチを軸7の中心から見た頂角(以下、高速側ピッチと称す。)θH、磁極片4の低速回転子3に面する磁極幅を軸7の中心から見た頂角(以下、低速側磁極幅と称す。)αL、磁極片4の高速回転子2に面する磁極幅を軸7の中心から見た頂角(以下、高速側磁極幅と称す。)αHと表し、固定子5の磁極数NSが低速回転子3の極対数NLと高速回転子2の極対数NHの和の場合、高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLが、式(2)を満たしている。
逆に、固定子5の磁極数NSが低速回転子3の極対数NLと高速回転子2の極対数NHの差の場合、高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLが、式(3)を満たしている。

次に、上述したように、高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLが、式(2)または(3)を満たすことによる臨界的効果について説明する。
一般的に、高速回転子2が作る起磁力が固定子5の磁極片4を透過した磁束のうち、低速回転子3と同極成分の磁束のみがトルクに寄与する。逆に、低速回転子3が作る起磁力が固定子5の磁極片4を透過した磁束のうち、高速回転子2と同極成分の磁束のみがトルクに寄与する。
一般的に、高速回転子2が作る起磁力が固定子5の磁極片4を透過した磁束のうち、低速回転子3と同極成分の磁束のみがトルクに寄与する。逆に、低速回転子3が作る起磁力が固定子5の磁極片4を透過した磁束のうち、高速回転子2と同極成分の磁束のみがトルクに寄与する。
ここで、説明を簡単にするために、図2に示すように、高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLとが等しいとしてα/θとして説明する。
高速回転子2の起磁力に対する透過磁束の低速回転子3の同極成分の割合と、低速回転子3の起磁力に対する透過磁束の高速回転子2の同極成分の割合は、α/θが等しければ等しくなる。
ここで、固定子5内での漏れ磁束がないと仮定した理想的な場合、α/θは0.5において最も透過磁束が大きくなる。しかし、漏れ磁束を考慮した場合には以下の現象となる。
高速回転子2の起磁力に対する透過磁束の低速回転子3の同極成分の割合と、低速回転子3の起磁力に対する透過磁束の高速回転子2の同極成分の割合は、α/θが等しければ等しくなる。
ここで、固定子5内での漏れ磁束がないと仮定した理想的な場合、α/θは0.5において最も透過磁束が大きくなる。しかし、漏れ磁束を考慮した場合には以下の現象となる。
図3には、固定子5の磁極片4により変調される前の起磁力分布(図3では正弦波状)に対して、固定子5の磁極片4により変調され、透過した磁束の波形を、固定子5の磁極片4内の漏れ磁束を考慮して、模式的に示す。
変調される前の起磁力分布に対して、磁極片4がある部分の磁束が透過し、非磁性片13のある部分の磁束が透過しない。また、磁極片4に達した磁束は、その磁極片4の幅間に届いた磁束の平均値となって透過する。
変調される前の起磁力分布に対して、磁極片4がある部分の磁束が透過し、非磁性片13のある部分の磁束が透過しない。また、磁極片4に達した磁束は、その磁極片4の幅間に届いた磁束の平均値となって透過する。
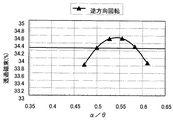
図4は、高速回転子2と低速回転子3が逆方向に回転しているとき、透過磁束を周波数分析し、高速回転子2から発生する起磁力透過磁束に対しては低速回転子3と同極成分、低速回転子3から発生する起磁力透過磁束に対しては高速回転子2と同極成分を抜き出し、固定子5の磁極片4の磁極幅とピッチの比に対して透過磁束の割合をプロットしたグラフである。
図5は、高速回転子2と低速回転子3が同方向に回転しているとき、透過磁束を周波数分析し、高速回転子2から発生する起磁力透過磁束に対しては低速回転子3と同極成分、低速回転子3から発生する起磁力透過磁束に対しては高速回転子2と同極成分を抜き出し、固定子5の磁極片4の磁極幅とピッチの比に対して透過磁束の割合をプロットしたグラフである。
図5は、高速回転子2と低速回転子3が同方向に回転しているとき、透過磁束を周波数分析し、高速回転子2から発生する起磁力透過磁束に対しては低速回転子3と同極成分、低速回転子3から発生する起磁力透過磁束に対しては高速回転子2と同極成分を抜き出し、固定子5の磁極片4の磁極幅とピッチの比に対して透過磁束の割合をプロットしたグラフである。
図4より、高速回転子2と低速回転子3が逆方向に回転する場合、α/θが0.5を超えて、0.58未満のときに、有効透過磁束が大きくなり、したがって、発生トルクが大きくなる。
図5より、高速回転子2と低速回転子3が同方向に回転する場合、α/θが0.5未満で、0.42を超えているときに、有効透過磁束が大きくなり、したがって発生トルクが大きくなる。
すなわち、固定子5の磁極片4内での漏れ磁束がある場合、α/θが0.5に対して、逆方向回転では超えているとき、同方向回転では未満のとき、発生トルクが大きくなる。
図5より、高速回転子2と低速回転子3が同方向に回転する場合、α/θが0.5未満で、0.42を超えているときに、有効透過磁束が大きくなり、したがって発生トルクが大きくなる。
すなわち、固定子5の磁極片4内での漏れ磁束がある場合、α/θが0.5に対して、逆方向回転では超えているとき、同方向回転では未満のとき、発生トルクが大きくなる。
次に、固定子5の磁極片4を積層鋼板で構成した効果について説明する。
固定子5の磁極片4が面する空隙には、低速回転子3および高速回転子2が作る変動磁場にさらされている。このため、固定子5の磁極片4を塊状鉄心で作成すれば、これら変動磁場が磁極片4に渦電流を発生させ、渦電流損失によってトルクが低下する。
これを回避するために固定子5の磁極片4を積層鉄心とすることが考えられるが、軸方向に鋼板を積層した場合、鋼板毎に作用する電磁力を保持するように固定する必要があり、工作上困難が伴う。
そこで、本願では、周方向に鋼板を積層しており、積層方向に鋼板を固定することを磁極片4を狭持する非磁性片13により受け持つことができる。すなわち、図1に示すように磁極片4を周方向に積層することで、渦電流損失によるトルク低下を防止し、堅牢な固定子5を構成することができる。
固定子5の磁極片4が面する空隙には、低速回転子3および高速回転子2が作る変動磁場にさらされている。このため、固定子5の磁極片4を塊状鉄心で作成すれば、これら変動磁場が磁極片4に渦電流を発生させ、渦電流損失によってトルクが低下する。
これを回避するために固定子5の磁極片4を積層鉄心とすることが考えられるが、軸方向に鋼板を積層した場合、鋼板毎に作用する電磁力を保持するように固定する必要があり、工作上困難が伴う。
そこで、本願では、周方向に鋼板を積層しており、積層方向に鋼板を固定することを磁極片4を狭持する非磁性片13により受け持つことができる。すなわち、図1に示すように磁極片4を周方向に積層することで、渦電流損失によるトルク低下を防止し、堅牢な固定子5を構成することができる。
この発明の実施の形態1に係る磁気ギアは、固定子5の磁極片4の高速側磁極幅αHと高速側ピッチθHとの比αH/θHと、低速側磁極幅αLと低速側ピッチθLとの比αL/θLが、式(2)または(3)を満たすようにすることにより、有効透過磁束が大きくなり、従って発生トルクが大きくなるという臨界的な効果を奏することができる。
また、固定子5の磁極片4を複数の鋼板を周方向に積層して構成することにより、渦電流損失によるトルク低下を防止できるとともに固定子5を堅牢に構成することができる。
また、固定子5の磁極片4を複数の鋼板を周方向に積層して構成することにより、渦電流損失によるトルク低下を防止できるとともに固定子5を堅牢に構成することができる。
実施の形態2.
図6は、この発明の実施の形態2に係る磁気ギアの斜視図である。図6(a)は、固定子の斜視図である。図6(b)は、高速回転子と低速回転子の斜視図である。
この発明の実施の形態2に係る磁気ギア1は、タンデム型であり、高速回転子2Bと低速回転子3Bが中心軸上に直列に並んで配置され、高速回転子2Bと低速回転子3Bの外側に複数の磁極片4からなる固定子5Bが空隙を介して配置されている。
図6は、この発明の実施の形態2に係る磁気ギアの斜視図である。図6(a)は、固定子の斜視図である。図6(b)は、高速回転子と低速回転子の斜視図である。
この発明の実施の形態2に係る磁気ギア1は、タンデム型であり、高速回転子2Bと低速回転子3Bが中心軸上に直列に並んで配置され、高速回転子2Bと低速回転子3Bの外側に複数の磁極片4からなる固定子5Bが空隙を介して配置されている。
高速回転子2Bは、一端はフリー軸受により回転自在に支持される中心軸上の軸7と、軸7により軸支された円筒状のコア8と、コア8の外側面に周方向に並べられて固定された複数の永久磁石9とから構成される。
低速回転子3Bは、一端はフリー軸受により回転自在に支持される中心軸上の軸21と、軸21により軸支された円筒状のコア22と、コア22の外側面に周方向に並べられて固定された複数の永久磁石12とから構成される。
そして、高速回転子2Bと低速回転子3Bのそれぞれの永久磁石9、12の数は、高速回転子2Bの方が低速回転子3Bより少なく、高速回転子2Bからは少極の起磁力が発生し、低速回転子3Bからは多極の起磁力が発生する。
低速回転子3Bは、一端はフリー軸受により回転自在に支持される中心軸上の軸21と、軸21により軸支された円筒状のコア22と、コア22の外側面に周方向に並べられて固定された複数の永久磁石12とから構成される。
そして、高速回転子2Bと低速回転子3Bのそれぞれの永久磁石9、12の数は、高速回転子2Bの方が低速回転子3Bより少なく、高速回転子2Bからは少極の起磁力が発生し、低速回転子3Bからは多極の起磁力が発生する。
固定子5Bは、周方向に磁極片4と非磁性片13が交互に円筒状に並べられ、外側面から円環状の支持部材23により締結されている。1つの磁極片4は、鋼板が積層され、積層された複数枚の鋼板が非磁性片13により固定される。
そして、支持部材23を固定物に固定することにより固定されている。
そして、支持部材23を固定物に固定することにより固定されている。
高速回転子2Bの極対数NH、低速回転子3Bの極対数NL、固定子5Bの磁極数NSは、式(1)の関係を満足するように設定されている。従って、高速回転子2Bの速度は低速回転子3Bの速度のNL/NH倍となる。式(1)において、+は低速回転子3Bと高速回転子2Bが逆方向に回転し、−は低速回転子3Bと高速回転子2Bが同方向に回転する。
低速回転子3Bまたは高速回転子2Bが外部動力により回転力を与えられることにより、外部動力が与えられない高速回転子2Bまたは低速回転子3Bに速度を変調されたトルクが伝達する。
低速回転子3Bまたは高速回転子2Bが外部動力により回転力を与えられることにより、外部動力が与えられない高速回転子2Bまたは低速回転子3Bに速度を変調されたトルクが伝達する。
固定子5Bの磁極片4の高速回転子2に面するピッチを軸7の中心から見た頂角(以下、ピッチと称す。)θ、磁極片4の高速回転子2Bに面する磁極幅を軸7の中心から見た頂角(以下、磁極幅と称す。)αと表し、固定子5Bの磁極数NSが低速回転子3Bの極対数NLと高速回転子2Bの極対数NHの和の場合、磁極幅αとピッチθとの比α/θが、式(4)を満たしている。
逆に、固定子5Bの磁極数NSが低速回転子3Bの極対数NLと高速回転子2Bの極対数NHの差の場合、磁極幅αとピッチθとの比α/θが、式(5)を満たしている。
この発明の実施の形態2に係る磁気ギアは、固定子5Bの磁極片4の磁極幅αとピッチθとの比α/θが、式(4)または(5)を満たすようにすることにより、有効透過磁束が大きくなり、従って発生トルクが大きくなるという臨界的な効果を奏することができる。
また、固定子5Bの磁極片4を複数の鋼板を周方向に積層して構成することにより、渦電流損失によるトルク低下を防止できる。
また、固定子5Bの磁極片4を複数の鋼板を周方向に積層して構成することにより、渦電流損失によるトルク低下を防止できる。
尚、上述の実施の形態2に係る磁気ギアは、固定子5Bの磁極片4の磁極幅αとピッチθとの比α/θが、式(4)または(5)を満たすようにしているが、固定子5Bの磁極片4の磁極幅αとピッチθとの比α/θが、式(6)、(7)となるようにすることにより、有効透過磁束が最大になり、従って発生トルクも最大になるという臨界的な顕著な効果を奏する。
1 磁気ギア、2、2B 高速回転子、3、3B 低速回転子、4 磁極片、5、5B 固定子、6 空隙、7 軸、8 コア、9 永久磁石、11 コア、12 永久磁石、13 非磁性片、21 軸、22 コア、23 支持部材。
Claims (7)
- 高速回転子、低速回転子、及び、上記高速回転子と上記低速回転子とに対して空隙を隔てて向き合う固定子を備え、上記高速回転子または上記低速回転子の起磁力を変調することにより、回転速度を変化させてトルクを伝達する磁気ギアにおいて、
上記固定子の極対数は、上記低速回転子の極対数と上記高速回転子の極対数の和であり、
上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、0.5を超え、且つ0.58未満であることを特徴とする磁気ギア。 - 上記低速回転子と上記高速回転子が軸方向にタンデムに構成され、空隙を隔てて上記固定子の磁極片が上記低速回転子と上記高速回転子の外側にあることを特徴とする請求項1に記載の磁気ギア。
- 上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、略0.54であることを特徴とする請求項2に記載の磁気ギア。
- 高速回転子、低速回転子、及び、上記高速回転子と上記低速回転子と空隙を隔てて向き合う固定子を備え、上記高速回転子または上記低速回転子の起磁力を変調することで、回転速度を変化させてトルクを伝達する磁気ギアにおいて、
上記固定子の極対数は、上記低速回転子の極対数と上記高速回転子の極対数の差であり、
上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、0.42を超え、且つ0.5未満であることを特徴とする磁気ギア。 - 上記低速回転子と上記高速回転子が軸方向にタンデムに構成され、空隙を隔てて上記固定子の磁極片が上記低速回転子と上記高速回転子の外側にあることを特徴とする請求項4に記載の磁気ギア。
- 上記固定子の磁極片の周方向のピッチに対する上記磁極片の周方向の幅の比は、略0.46であることを特徴とする請求項5に記載の磁気ギア。
- 上記固定子の磁極片は、周方向に積層される複数の鋼板から構成されることを特徴とする請求項1または4に記載の磁気ギア。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011065841A JP2012205348A (ja) | 2011-03-24 | 2011-03-24 | 磁気ギア |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011065841A JP2012205348A (ja) | 2011-03-24 | 2011-03-24 | 磁気ギア |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012205348A true JP2012205348A (ja) | 2012-10-22 |
Family
ID=47185776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011065841A Withdrawn JP2012205348A (ja) | 2011-03-24 | 2011-03-24 | 磁気ギア |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012205348A (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104065242A (zh) * | 2014-06-27 | 2014-09-24 | 南京艾凌节能技术有限公司 | 一种一体化永磁变速减速机 |
| WO2015121647A1 (en) * | 2014-02-11 | 2015-08-20 | Magnomatics Limited | A magnetic gear system and method for reducing transmission of torque pulsation |
| JP2016512945A (ja) * | 2013-03-19 | 2016-05-09 | ヴェステック ホールディングス リミテッド | Bldcモータにおいて磁気クラッチを使用するためのデバイス及び方法 |
| CN106461055A (zh) * | 2014-05-20 | 2017-02-22 | 株式会社Ihi | 磁波齿轮装置 |
| CN106712452A (zh) * | 2017-01-24 | 2017-05-24 | 东南大学 | 双永磁内置聚磁式磁齿轮 |
| CN106787607A (zh) * | 2017-01-24 | 2017-05-31 | 东南大学 | 可变传动比的磁场调制型磁齿轮 |
| CN106899194A (zh) * | 2017-03-31 | 2017-06-27 | 东南大学 | 基于磁通调制复合电机的海流能一体化发电装置 |
| JP2018078777A (ja) * | 2016-11-11 | 2018-05-17 | 株式会社プロスパイン | 回転増速部を有する発電機 |
| JP2019150440A (ja) * | 2018-03-06 | 2019-09-12 | テルモ株式会社 | 血液ポンプ用磁気的変速装置 |
| CN110651417A (zh) * | 2017-07-26 | 2020-01-03 | 松下电器产业株式会社 | 旋转电机 |
| US10910934B2 (en) | 2015-10-15 | 2021-02-02 | Vastech Holdings Ltd. | Electric motor |
| US10916999B2 (en) | 2013-03-19 | 2021-02-09 | Intellitech Pty Ltd | Device and method for using a magnetic clutch in BLDC motors |
| CN112615524A (zh) * | 2020-11-30 | 2021-04-06 | 珠海格力电器股份有限公司 | 调制环、磁齿轮及复合电机 |
| EP3923457A4 (en) * | 2019-02-07 | 2022-03-23 | Panasonic Intellectual Property Management Co., Ltd. | MAGNETIC GEAR MOTOR |
| US11462983B2 (en) | 2017-12-28 | 2022-10-04 | Intellitech Pty Ltd | Electric motor |
| WO2022210237A1 (ja) * | 2021-03-30 | 2022-10-06 | 三菱重工業株式会社 | 磁気ギアード回転機械、発電システム、および磁極片回転子 |
| CN118920809A (zh) * | 2024-07-19 | 2024-11-08 | 湖南大学 | 一种低损耗可变磁通磁齿轮 |
-
2011
- 2011-03-24 JP JP2011065841A patent/JP2012205348A/ja not_active Withdrawn
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10312790B2 (en) | 2013-03-19 | 2019-06-04 | Intellitech Pty Ltd | Device and method for using a magnetic clutch in BLDC motors |
| US10916999B2 (en) | 2013-03-19 | 2021-02-09 | Intellitech Pty Ltd | Device and method for using a magnetic clutch in BLDC motors |
| JP2016512945A (ja) * | 2013-03-19 | 2016-05-09 | ヴェステック ホールディングス リミテッド | Bldcモータにおいて磁気クラッチを使用するためのデバイス及び方法 |
| CN105993126A (zh) * | 2014-02-11 | 2016-10-05 | 马格诺麦克斯有限公司 | 磁齿轮系统和用于减小扭矩脉动传送的方法 |
| WO2015121647A1 (en) * | 2014-02-11 | 2015-08-20 | Magnomatics Limited | A magnetic gear system and method for reducing transmission of torque pulsation |
| US10418927B2 (en) | 2014-02-11 | 2019-09-17 | Magnomatics Limited | Magnetic gear system and method for reducing transmission of torque pulsation |
| CN106461055A (zh) * | 2014-05-20 | 2017-02-22 | 株式会社Ihi | 磁波齿轮装置 |
| CN104065242A (zh) * | 2014-06-27 | 2014-09-24 | 南京艾凌节能技术有限公司 | 一种一体化永磁变速减速机 |
| US10910934B2 (en) | 2015-10-15 | 2021-02-02 | Vastech Holdings Ltd. | Electric motor |
| JP2018078777A (ja) * | 2016-11-11 | 2018-05-17 | 株式会社プロスパイン | 回転増速部を有する発電機 |
| CN106712452A (zh) * | 2017-01-24 | 2017-05-24 | 东南大学 | 双永磁内置聚磁式磁齿轮 |
| CN106787607A (zh) * | 2017-01-24 | 2017-05-31 | 东南大学 | 可变传动比的磁场调制型磁齿轮 |
| CN106899194A (zh) * | 2017-03-31 | 2017-06-27 | 东南大学 | 基于磁通调制复合电机的海流能一体化发电装置 |
| CN110651417A (zh) * | 2017-07-26 | 2020-01-03 | 松下电器产业株式会社 | 旋转电机 |
| US11462983B2 (en) | 2017-12-28 | 2022-10-04 | Intellitech Pty Ltd | Electric motor |
| JP2019150440A (ja) * | 2018-03-06 | 2019-09-12 | テルモ株式会社 | 血液ポンプ用磁気的変速装置 |
| JP7019461B2 (ja) | 2018-03-06 | 2022-02-15 | テルモ株式会社 | 血液ポンプ用磁気的変速装置 |
| EP3923457A4 (en) * | 2019-02-07 | 2022-03-23 | Panasonic Intellectual Property Management Co., Ltd. | MAGNETIC GEAR MOTOR |
| CN112615524A (zh) * | 2020-11-30 | 2021-04-06 | 珠海格力电器股份有限公司 | 调制环、磁齿轮及复合电机 |
| CN112615524B (zh) * | 2020-11-30 | 2022-02-08 | 珠海格力电器股份有限公司 | 调制环、磁齿轮及复合电机 |
| WO2022210237A1 (ja) * | 2021-03-30 | 2022-10-06 | 三菱重工業株式会社 | 磁気ギアード回転機械、発電システム、および磁極片回転子 |
| JP2022155119A (ja) * | 2021-03-30 | 2022-10-13 | 三菱重工業株式会社 | 磁気ギアード回転機械、発電システム、および磁極片回転子 |
| JP7610218B2 (ja) | 2021-03-30 | 2025-01-08 | 三菱重工業株式会社 | 磁気ギアード回転機械、発電システム、および磁極片回転子 |
| CN118920809A (zh) * | 2024-07-19 | 2024-11-08 | 湖南大学 | 一种低损耗可变磁通磁齿轮 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012205348A (ja) | 磁気ギア | |
| CN107070031B (zh) | 一种转子、定子及多工作谐波永磁电机 | |
| US10014738B2 (en) | Magnetic wave gear device | |
| Li et al. | Performance analysis of a flux-concentrating field-modulated permanent-magnet machine for direct-drive applications | |
| Davey et al. | Axial flux cycloidal magnetic gears | |
| CN112467905B (zh) | 一种游标磁齿轮复合电机 | |
| US10476349B2 (en) | Method and apparatus for compact axial flux magnetically geared machines | |
| KR101173107B1 (ko) | 발전기 | |
| CN101951090A (zh) | 径向磁场调制型无刷双转子电机 | |
| WO2014038062A1 (ja) | 永久磁石埋込型電動機 | |
| JPWO2015137392A1 (ja) | 環状磁極部材及び磁気波動歯車装置 | |
| CN102570754A (zh) | 一种用于低速大转矩的永磁游标电机 | |
| US20170005560A1 (en) | Flux focusing magnetic gear assembly using ferrite magnets or the like | |
| JPWO2015140941A1 (ja) | 永久磁石型電動機の回転子 | |
| JP2013123369A (ja) | 永久磁石ロータ及びこのロータを組み込んだモータ | |
| CN103997174A (zh) | 基于磁齿轮的转子凸极式混合励磁电机 | |
| JP2007074870A (ja) | 永久磁石埋込型ロータおよび永久磁石埋込型モータ | |
| CN108092480A (zh) | 一种永磁电机 | |
| JP6408766B2 (ja) | アキシャル立体ギャップ式回転電機 | |
| CN101588119B (zh) | 一种爪极式定子的聚磁式横向磁场电机 | |
| EP3661034A1 (en) | Rotary electric machine | |
| JP5194984B2 (ja) | 永久磁石型ロータ | |
| EP2919369A1 (en) | Electromagnetic generator | |
| JP2010045870A (ja) | 回転機 | |
| CN207977873U (zh) | 一种永磁电机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |