JP2012205604A - 生体インピーダンス測定装置 - Google Patents
生体インピーダンス測定装置 Download PDFInfo
- Publication number
- JP2012205604A JP2012205604A JP2011058885A JP2011058885A JP2012205604A JP 2012205604 A JP2012205604 A JP 2012205604A JP 2011058885 A JP2011058885 A JP 2011058885A JP 2011058885 A JP2011058885 A JP 2011058885A JP 2012205604 A JP2012205604 A JP 2012205604A
- Authority
- JP
- Japan
- Prior art keywords
- electromagnets
- current
- electrodes
- frequency
- bioimpedance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 claims abstract description 52
- 229910000859 α-Fe Inorganic materials 0.000 claims description 12
- 230000001360 synchronised effect Effects 0.000 claims 1
- 238000000034 method Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 13
- 230000014509 gene expression Effects 0.000 description 6
- 125000006850 spacer group Chemical group 0.000 description 5
- 210000000056 organ Anatomy 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images


Landscapes
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
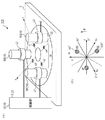
【解決手段】渦電流発生装置10は、略同心円上に略等間隔に配置された複数の電磁石M1〜M3を備える。電磁石M1〜M3の端面が生体組織2の表面に対向するように配置され、各電磁石M1〜M3がそれぞれのコイルL1〜L3に流れる駆動電流に応じた渦電流を発生させる。渦電流発生装置10は、電磁石M1〜M3が発生させる渦電流の合成電流の方向が、時間とともに変化するように、コイルL1〜L3に流れる駆動電流を変化させる。電位差測定装置30は、生体組織2の表面上に配置された複数の測定用電極e1〜e4を有し、渦電流によって生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する。
【選択図】図1
Description
この態様によれば、フェライトと電磁石の距離に応じて、電磁石が発生する磁界が生体組織に浸透する深さを調節することができ、深さ方向のインピーダンス分布を測定することが可能となる。
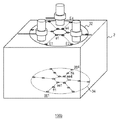
図1(a)、(b)は、第1の実施の形態に係る生体インピーダンス測定装置100の構成を示す図である。生体インピーダンス測定装置100は、生体組織のインピーダンスを測定するために利用される。図1(a)は、生体インピーダンス測定装置100の斜視図であり、図1(b)は上方断面図である。生体インピーダンス測定装置100は、主として、渦電流発生装置10および30を備える。
J1=k1×IL1×h1 …(1)
ここでh1は、θ=90度の向きを有する単位ベクトルであり、k1は電磁石M1の形状、材料、コイルの巻き数、磁石と観測点の位置関係等によって定まる係数である。
J2=k2×IL2×h2 …(2)
J3=k3×IL3×h3 …(3)
h2は、θ=210度の向きを有する単位ベクトル、h3はθ=330度の向きを有する単位ベクトルであり、k2、k3は、k1と同様の係数である。
Jtotal=Σi=1:mJi=J1+J2+J3
=k1×IL1×h1+k2×IL2×h2+k3×IL3×h3 …(4)
ここで、Σi=1:mJiは、J1からJmの総和を表す。
好ましい態様において、駆動部12は、電磁石M1〜M3それぞれのコイルL1〜L3に、互いに位相が略(360/m)度シフトした同一周波数の高周波の駆動電流IL1〜IL3を供給する。つまり各電磁石M1〜M3のコイルL1〜L3には、角周波数ωの三相対称高周波の駆動電流IL1〜IL3が供給される。図2(a)、(b)は、三相対称高周波の駆動電流IL1〜IL3および合成電流Jtotalの向きを示す図である。
IL1=I0・cos(ωt) …(5a)
IL2=I0・cos(ωt−2π/3) …(5b)
IL3=I0・cos(ωt−4π/3) …(5c)
Jtotal=k×(IL1×h1+IL2×h2+IL3×h3) …(6)
Jtotal=k×I0×{h1・cos(ωt)+h2・cos(ωt−2π/3)+h3・cos(ωt−4π/3)} …(7)
Jx=−(3/2)k・I0・sin(ωt) (8a)
Jy=(3/2)k・I0・cos(ωt) (8b)
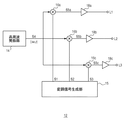
駆動部12は、第1周波数ω1を有する高周波キャリア電流を、第1周波数ω1より低い第2周波数ω2を有するm個の変調信号S1〜Smによって振幅変調することによりm個の駆動電流IL1〜ILmを生成する。そしてm個の駆動電流IL1〜ILmそれぞれを電磁石M1〜MmそれぞれのコイルL1〜Lmに流すことにより、流れる方向が変調信号S1〜Smと同期して変化する合成電流Jtotalを生体組織内に発生させる。
S1=cos(ω2t) …(9a)
S2=cos(ω2t−2π/3) …(9b)
S3=cos(ω2t−4π/3) …(9c)
IL1=I0・cos(ω1t)・cos(ω2t) …(10a)
IL2=I0・cos(ω1t)・cos(ω2t−2π/3) …(10b)
IL3=I0・cos(ω1t)・cos(ω2t−4π/3) …(10c)
Jx=−(3/2)k・I0・cos(ω1t)sin(ω2t) (11a)
Jy=(3/2)k・I0・cos(ω1t)・cos(ω2t) (11b)
あるいは、変調信号S1〜S3の波形は、図4(a)のそれらに限定されず、たとえば、位相角θをスクランブルしてもよい。言い換えれば時間区間A〜Fの順番を任意に入れ替えてもよい。
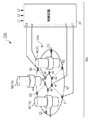
図5は、第2の実施の形態に係る生体インピーダンス測定装置100aの構成を示す図である。生体インピーダンス測定装置100aは、渦電流発生装置10は図1(a)と同様に構成され、電位差測定装置30aの構成が異なっている。なお、図1(a)と共通の構成については図示および説明は省略する。
いま、測定用電極e1とe4のペアがなす方向θに、合成電流Jtotalが流れているものとする。このときキャンセル用電極E1とE4のペアの間に電圧を与えることにより、電磁石M1〜M3が発生する合成電流Jtotalと逆向きのキャンセル電流Jcancelが発生する。このキャンセル電流Jcancelは、生体組織の表面付近に流れるため、組織表面付近の合成電流Jtotalを、キャンセル電流Jcancelによってキャンセルすることができる。このときにキャンセル用電極E1とE4のペア間に流れる電流値は、生体組織の深い部分において、方向θのインピーダンスを示す。したがって、図5の生体インピーダンス測定装置100aによれば、キャンセル用電極に流れる電流値にもとづき、生体組織の深い部分のインピーダンスを測定することができる。
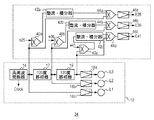
図7は、第3の実施の形態に係る生体インピーダンス測定装置100bの構成を示す図である。第3の実施の形態に係る生体インピーダンス測定装置100bは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
図8は、第4の実施の形態に係る生体インピーダンス測定装置100cの構成を示す図である。第4の実施の形態に係る生体インピーダンス測定装置100cは、第1または第2の実施の形態に係る生体インピーダンス測定装置と組み合わせて利用することができる。
Claims (9)
- 生体組織のインピーダンスを測定する生体インピーダンス測定装置であって、
略同心円上に略等間隔に配置されたm個(mは2以上の整数)の電磁石であって、それぞれの端面が前記生体組織の表面に対向するように配置され、各電磁石がそれぞれのコイルに流れる駆動電流に応じた渦電流を発生させる、m個の電磁石を有し、前記生体組織内に前記m個の電磁石が発生させる渦電流の合成電流の方向が、時間とともに変化するように、前記m個の電磁石それぞれのコイルに流れる駆動電流を変化させる渦電流発生装置と、
生体組織の表面上に配置された複数の測定用電極を有し、前記渦電流によって前記生体組織に発生する電位差を、2つの測定用電極のペアを用いて測定する電位差測定装置と、
を備えることを特徴とする生体インピーダンス測定装置。 - 前記m個の電磁石それぞれのコイルには、互いに位相が略(360/M)度シフトした同一周波数の高周波の駆動電流が供給され、前記生体組織内には、流れる方向が前記駆動電流と同期して回転する前記合成電流が発生することを特徴とする請求項1に記載の生体インピーダンス測定装置。
- M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、各電磁石のコイルには、三相対称高周波の駆動電流が供給されることを特徴とする請求項2に記載の生体インピーダンス測定装置。
- 前記渦電流発生装置は、第1周波数を有する高周波キャリア電流を、前記第1周波数より低い第2周波数を有するm個の変調信号によって振幅変調することによりm個の駆動電流を生成し、m個の駆動電流それぞれを前記m個の電磁石それぞれのコイルに流すことにより、流れる方向が前記変調信号と同期して変化する前記合成電流を前記生体組織内に発生させることを特徴とする請求項1に記載の生体インピーダンス測定装置。
- M=3であって、3個の電磁石は空間的に120度ずつ離れた略同心円上に配置され、前記m個の変調信号は、位相が互いに120度シフトした前記第2周波数の三相対称交流の各成分であることを特徴とする請求項4に記載の生体インピーダンス測定装置。
- 前記電位差測定装置は、
生体組織の表面上に配置された複数のキャンセル用電極をさらに有し、
対向する2つの測定用電極のペアの間に発生する電位差が実質的にゼロになるように、それと対応するキャンセル用電極のペアの間に通電する高周波電流の振幅と位相を制御し、このキャンセル用電極のペア間に流れた電流値より、対応する測定用電極のペアがなす方向のインピーダンスを測定することを特徴とする請求項1から5のいずれかに記載の生体インピーダンス測定装置。 - 前記複数の測定用電極は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項1に記載の生体インピーダンス測定装置。
- 前記複数の測定用電極および前記複数のキャンセル用電極の少なくとも一方は、前記m個の電磁石の端面がなす面と平行で、深度が異なる面内に設置されることを特徴とする請求項6に記載の生体インピーダンス測定装置。
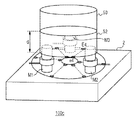
- 前記m個の電磁石の第2の端面に、磁気的に共通にカップリングされるフェライトをさらに備え、当該フェライトと前記m個の電磁石の第2の端面の距離が調節可能であることを特徴とする請求項1から8のいずれかに記載の生体インピーダンス測定装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US32079110A | 2010-04-05 | 2010-04-05 | |
| US61/320,791 | 2010-04-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012205604A true JP2012205604A (ja) | 2012-10-25 |
| JP5669139B2 JP5669139B2 (ja) | 2015-02-12 |
Family
ID=47185974
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011058885A Expired - Fee Related JP5669139B2 (ja) | 2010-04-05 | 2011-03-17 | 生体インピーダンス測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5669139B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016047515A1 (ja) * | 2014-09-22 | 2016-03-31 | スカラ株式会社 | 水分計 |
| JP2023073088A (ja) * | 2021-11-15 | 2023-05-25 | 株式会社豊田中央研究所 | 生体電気インピーダンスの測定装置および測定方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01189552A (ja) * | 1988-01-25 | 1989-07-28 | Iryo Kogaku Kenkyusho:Kk | 生体インピーダンス測定装置 |
| JPH0415036A (ja) * | 1990-05-08 | 1992-01-20 | Iryo Kogaku Kenkyusho:Kk | 血圧測定装置 |
| JPH06123731A (ja) * | 1992-08-20 | 1994-05-06 | Mitsubishi Heavy Ind Ltd | 渦電流センサ及び渦電流発生回路 |
| WO2011022068A1 (en) * | 2009-08-21 | 2011-02-24 | Rutkove Seward B | A hand-held device for electrical impedance myography |
-
2011
- 2011-03-17 JP JP2011058885A patent/JP5669139B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01189552A (ja) * | 1988-01-25 | 1989-07-28 | Iryo Kogaku Kenkyusho:Kk | 生体インピーダンス測定装置 |
| JPH0415036A (ja) * | 1990-05-08 | 1992-01-20 | Iryo Kogaku Kenkyusho:Kk | 血圧測定装置 |
| JPH06123731A (ja) * | 1992-08-20 | 1994-05-06 | Mitsubishi Heavy Ind Ltd | 渦電流センサ及び渦電流発生回路 |
| WO2011022068A1 (en) * | 2009-08-21 | 2011-02-24 | Rutkove Seward B | A hand-held device for electrical impedance myography |
Non-Patent Citations (3)
| Title |
|---|
| CSNJ201110036060; 竹前 忠 Tadashi Takemae: 電子情報通信学会2011年総合大会講演論文集 情報・システム1 PROCEEDINGS OF THE 2011 IEICE GENERA * |
| JPN6014041449; 竹前 忠 Tadashi Takemae: '"三相渦電流による生体組織の電気異方性の測定"' 電子情報通信学会2011年総合大会講演論文集 情報・システム1 PROCEEDINGS OF THE 2011 IEICE GENERA , p.60 * |
| JPN6014041449; 竹前 忠 Tadashi Takemae: 電子情報通信学会2011年総合大会講演論文集 情報・システム1 PROCEEDINGS OF THE 2011 IEICE GENERA * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016047515A1 (ja) * | 2014-09-22 | 2016-03-31 | スカラ株式会社 | 水分計 |
| JP2023073088A (ja) * | 2021-11-15 | 2023-05-25 | 株式会社豊田中央研究所 | 生体電気インピーダンスの測定装置および測定方法 |
| JP7655199B2 (ja) | 2021-11-15 | 2025-04-02 | 株式会社豊田中央研究所 | 生体電気インピーダンスの測定装置および測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5669139B2 (ja) | 2015-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4583371B2 (ja) | 磁性粒子を含む検査下の対象の電界の検査及び使用方法 | |
| CA2586416C (en) | Reduced field distortion in medical tools | |
| CN103516254B (zh) | 用于振动型致动器的驱动装置以及使用它的医疗系统 | |
| JP2020508730A (ja) | オープンボアフィールドフリーライン磁性粒子イメージングシステム | |
| EP1615553B1 (en) | Arrangement for influencing magnetic particles | |
| Ma et al. | Magnetoacoustic tomography with magnetic induction: a rigorous theory | |
| US20180081001A1 (en) | Magnetic Sensor, Magnetic Sensor Device, and Diagnostic Device | |
| CN101563029A (zh) | 用于获取心电图(ecg)信号的方法和装置 | |
| EP1830702B1 (en) | Method of determining a spatial distribution of magnetic particles | |
| Yu et al. | Performance improvement of magneto-acousto-electrical tomography for biological tissues with sinusoid-Barker coded excitation | |
| JP5669139B2 (ja) | 生体インピーダンス測定装置 | |
| US20220163607A1 (en) | System for the one-sided generation of magnetic fields for the multidimensional encoding of magnetic particles and method of operation thereof | |
| CN102316796A (zh) | 用于磁感应断层成像的方法和装置 | |
| Barbieri et al. | An educational path for the magnetic vector potential and its physical implications | |
| Grasland-Mongrain et al. | Imaging of shear waves induced by Lorentz force in soft tissues | |
| CN109030532B (zh) | 一种单边核磁共振三维成像磁体系统 | |
| CN103006185B (zh) | 一种非接触磁感应电阻抗平面投影成像装置及方法 | |
| JP6506273B2 (ja) | 柔軟な固体の情報を収集するための、せん断弾性波画像化方法および装置 | |
| WO2008078272A2 (en) | Arrangement and method for influencing and/or detecting magnetic particles in a region of action | |
| CN117547242B (zh) | 磁感应断层成像设备 | |
| EP1440327B1 (en) | Mri gradient coils with reduced neural stimulation | |
| US20110273175A1 (en) | Permanent magnetic assembly for | |
| EP3545835B1 (en) | System and method for generating a traveling field free line | |
| Su et al. | Tunable magnetic domain walls for therapeutic neuromodulation at cellular level: Stimulating neurons through magnetic domain walls | |
| US20100109662A1 (en) | Arrangement and method for influencing and/or detecting magnetic particles in a region of action |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141027 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5669139 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |