JP2012206476A - 印刷装置 - Google Patents
印刷装置 Download PDFInfo
- Publication number
- JP2012206476A JP2012206476A JP2011075813A JP2011075813A JP2012206476A JP 2012206476 A JP2012206476 A JP 2012206476A JP 2011075813 A JP2011075813 A JP 2011075813A JP 2011075813 A JP2011075813 A JP 2011075813A JP 2012206476 A JP2012206476 A JP 2012206476A
- Authority
- JP
- Japan
- Prior art keywords
- semiconductor substrate
- unit
- suction
- printing apparatus
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000000758 substrate Substances 0.000 claims abstract description 182
- 238000012545 processing Methods 0.000 claims abstract description 26
- 239000004065 semiconductor Substances 0.000 claims description 163
- 239000000463 material Substances 0.000 claims description 38
- 230000032258 transport Effects 0.000 claims description 33
- 238000000034 method Methods 0.000 claims description 27
- 238000001179 sorption measurement Methods 0.000 claims description 23
- 239000007788 liquid Substances 0.000 claims description 22
- 230000008569 process Effects 0.000 claims description 17
- 238000007599 discharging Methods 0.000 claims description 5
- 230000003028 elevating effect Effects 0.000 abstract description 16
- 238000003860 storage Methods 0.000 description 49
- 230000007246 mechanism Effects 0.000 description 39
- 238000001816 cooling Methods 0.000 description 23
- 239000000976 ink Substances 0.000 description 13
- 238000007781 pre-processing Methods 0.000 description 13
- 238000012805 post-processing Methods 0.000 description 9
- 238000000576 coating method Methods 0.000 description 8
- 238000001125 extrusion Methods 0.000 description 8
- 239000011347 resin Substances 0.000 description 8
- 229920005989 resin Polymers 0.000 description 8
- 239000011248 coating agent Substances 0.000 description 7
- 239000000725 suspension Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 230000001678 irradiating effect Effects 0.000 description 5
- 239000002609 medium Substances 0.000 description 5
- 239000003638 chemical reducing agent Substances 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 239000003999 initiator Substances 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 3
- 229910052753 mercury Inorganic materials 0.000 description 3
- 239000002904 solvent Substances 0.000 description 3
- 239000004593 Epoxy Substances 0.000 description 2
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 239000002612 dispersion medium Substances 0.000 description 2
- 238000010894 electron beam technology Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 229910052739 hydrogen Inorganic materials 0.000 description 2
- 239000001257 hydrogen Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- ISWSIDIOOBJBQZ-UHFFFAOYSA-N Phenol Chemical compound OC1=CC=CC=C1 ISWSIDIOOBJBQZ-UHFFFAOYSA-N 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000004132 cross linking Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000000178 monomer Substances 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 238000006116 polymerization reaction Methods 0.000 description 1
- 238000002203 pretreatment Methods 0.000 description 1
- 238000003303 reheating Methods 0.000 description 1
- 230000002940 repellent Effects 0.000 description 1
- 239000005871 repellent Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000004753 textile Substances 0.000 description 1
- 239000012463 white pigment Substances 0.000 description 1
Images







Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【解決手段】保持面140aで基材1を保持するテーブル部140を有し、テーブル部で保持した基材に対して印刷に関する所定の処理を行う処理装置と、テーブル部の保持面に対して出没自在、且つ保持面に沿う方向に間隔をあけて設けられ、それぞれが基材の下面を吸着する複数の吸着部161と、複数の吸着部を一括的に昇降させる昇降装置163と、吸着部の昇降に応じて吸着部の吸着を制御する制御部CONTと、を備える。
【選択図】図8
Description
搬送装置の支持部により基板を下方から支持した状態でテーブル部の表面に載置する場合には、支持部がテーブル部の表面と接触して基板の載置に不都合が生じてしまう。そこで、支持部と対向するテーブル部の表面に、支持部と対応する大きさ及び深さで溝部を形成することが考えられる。ところが基板の大きさが変動し、且つ基板の中心位置が支持部に対して変位する場合、当該基板中心位置をテーブル部の中心位置に合わせて載置することが困難になる。また、溝部の大きさを支持部の大きさに対して十分に大きくとることも考えられるが、この場合、テーブル部における支持面が大幅に小さくなり、基板を安定して支持できなくなるため現実的ではない。
本発明の印刷装置は、保持面で基材を保持するテーブル部を有し、前記テーブル部で保持した前記基材に対して印刷に関する所定の処理を行う処理装置と、前記テーブル部の前記保持面に対して出没自在、且つ前記保持面に沿う方向に間隔をあけて設けられ、それぞれが前記基材の下面を吸着する複数の吸着部と、前記複数の吸着部を一括的に昇降させる昇降装置と、前記吸着部の昇降に応じて前記吸着部の吸着を制御する制御部と、を備えることを特徴とするものである。
これにより、本発明では、基材に反り等が生じていた場合でも、吸着部が反りに応じて撓むことにより、基材の吸着を維持することができる。
これにより、本発明では、支持部と吸着部との位置関係が重ならないようにずらせた際に、全ての支持部と吸着部とについて接触させないことが可能になる。
これにより、本発明では、円滑にテーブル部に保持された基材に対して活性光線を照射することで、迅速且つ小さな環境負荷で印刷処理を実行することができる。
これにより、本発明では、円滑にテーブル部に保持された基材における半導体装置の属性情報等を示す印刷パターンを成膜・印刷することができる。
なお、本明細書における、相対移動方向や直交する方向については、製造・組立による誤差等によってずれる範囲も含むものである。
なお、以下の実施の実施形態は、本発明の一態様を示すものであり、この発明を限定するものではなく、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせている。
まず、印刷装置を用いて描画(印刷)する対象の一例である半導体基板について説明する。
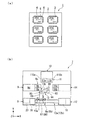
図1(a)は半導体基板を示す模式平面図である。図1(a)に示すように、基材としての半導体基板1は基板2及び半導体装置3を備えている。基板2は耐熱性があり半導体装置3を実装可能であれば良く、基板2にはガラスエポキシ基板、紙フェノール基板、紙エポキシ基板等を用いることができる。被記録媒体としての半導体装置3は、パッケージ基材であってもよいし、半導体基材であってもよい。
図1(b)は印刷装置を示す模式平面図である。
図1(b)に示すように、印刷装置7は主に供給部8、前処理部9、塗布部(印刷部)10、冷却部11、収納部12、搬送部13、後処理部14及び制御部CONT(図8参照)の各種印刷に関連する処理を行う複数の処理装置から構成されている。なお、供給部8、収納部12が並ぶ方向、及び前処理部9、冷却部11、後処理部14が並ぶ方向をX方向とする。X方向と直交する方向をY方向とし、Y方向には塗布部10、冷却部11、搬送部13が並んで配置されている。そして、鉛直方向をZ方向とする。
(供給部)
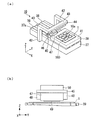
図2(a)は供給部を示す模式正面図であり、図2(b)及び図2(c)は供給部を示す模式側面図である。図2(a)及び図2(b)に示すように、供給部8は基台15を備えている。基台15の内部には昇降装置16が設置されている。昇降装置16はZ方向に動作する直動機構を備えている。この直動機構はボールネジと回転モーターとの組合せや油圧シリンダーとオイルポンプの組合せ等の機構を用いることができる。本実施形態では、例えば、ボールネジとステップモーターとによる機構を採用している。基台15の上側には昇降板17が昇降装置16と接続して設置されている。そして、昇降板17は昇降装置16により所定の移動量だけ昇降可能になっている。
このようにして供給部8は順次半導体基板1を収納容器18からレール8b上に移動する。収納容器18内の半導体基板1を総て中継台23上に移動した後、操作者は空になった収納容器18と半導体基板1が収納されている収納容器18とを置き換える。これにより、供給部8に半導体基板1を供給することができる。
前処理部9は、中継場所9a、9bに搬送された半導体基板1に対して、処理場所9dにおいて前処理を行う。前処理としては、加熱した状態で、例えば、低圧水銀ランプ、水素バーナー、エキシマレーザー、プラズマ放電部、コロナ放電部等による活性光線の照射を例示できる。水銀ランプを用いる場合、半導体基板1に紫外線を照射することにより、半導体基板1の表面の撥液性を改質することができる。水素バーナーを用いる場合、半導体基板1の酸化した表面を一部還元することで表面を粗面化することができ、エキシマレーザーを用いる場合、半導体基板1の表面を一部溶融固化することで粗面化することができ、プラズマ放電或いはコロナ放電を用いる場合、半導体基板1の表面を機械的に削ることで粗面化することができる。本実施形態では、例えば、水銀ランプを採用している。
前処理が終了した後、前処理部9は半導体基板1を中継場所9cに移動する。続いて、搬送部13が中継場所9cから半導体基板1を除材する。
冷却部11は、各処理場所11a、11bにそれぞれ設けられ、上面が半導体装置1の吸着保持面とされたヒートシンク等の冷却板110a、110bを有している。
処理場所11a、11b(冷却板110a、110b)は、把持部13aの動作範囲内に位置しており、処理場所11a、11bにおいて冷却板110a、110bは露出する。従って、搬送部13は容易に半導体基板1を冷却板110a、110bに載置することができる。半導体基板1に冷却処理が行われた後、半導体基板1は、処理場所11aに位置する冷却板110a上または処理場所11bに位置する冷却板110a上にて待機する。従って、搬送部13の把持部13aは容易に半導体基板1を把持して移動させることができる。
次に、半導体基板1に液滴を吐出してマークを形成する塗布部10について図3乃至図6に従って説明する。液滴を吐出する装置に関しては様々な種類の装置があるが、インクジェット法を用いた装置が好ましい。インクジェット法は微小な液滴の吐出が可能であるため、微細加工に適している。
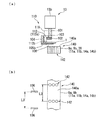
図5(a)は収納部を示す模式正面図であり、図5(b)及び図5(c)は収納部を示す模式側面図である。図5(a)及び図5(b)に示すように、収納部12は基台74を備えている。基台74の内部には昇降装置75が設置されている。昇降装置75は供給部8に設置された昇降装置16と同様の装置を用いることができる。基台74の上側には昇降板76が昇降装置75と接続して設置されている。そして、昇降板76は昇降装置75により昇降させられる。昇降板76の上には直方体状の収納容器18が設置され、収納容器18の中には半導体基板1が収納されている。収納容器18は供給部8に設置された収納容器18と同じ容器が用いられている。
次に、半導体基板1を搬送する搬送部13について図1、図6乃び図7に従って説明する。
搬送部13は、装置内の天部に設けられた支持体83を備えており、支持体83の内部にはモーター、角度検出器、減速機等から構成される回転機構が設置されている。そして、モーターの出力軸は減速機と接続され、減速機の出力軸は支持体83の下側に配置された第1腕部84と接続されている。また、モーターの出力軸と連結して角度検出器が設置され、角度検出器がモーターの出力軸のZ方向(第3方向)と平行な軸線周りの回転角度を検出する。これにより、回転機構は第1腕部84の回転角度を検出して、所望の角度まで回転させることができる。
なお、把持部13aは、回転機構88によって腕部13bに対してθZ方向(Z軸回りの回転方向)に回転移動可能に設けられ、XY平面における位置が変動するため、以下の説明では便宜上、XY平面と平行な一方向をx方向、XY平面と平行でx方向と直交する方向をy方向として説明する(Z方向は共通)。
図9に示すように、上述した供給部8、前処理部9、塗布部10、後処理部14、収納部12、搬送部13、昇降装置163、吸引装置164の動作は制御部CONTにより統括的に制御される。
次に上述した印刷装置7を用いた印刷方法について図10にて説明する。図10は、印刷方法を示すためのフローチャートである。
図10のフローチャートに示されるように、印刷方法は、半導体基板1を収納容器18から搬入する搬入工程S1、搬入された半導体基板1の表面に対して前処理を施す前処理工程S2、前処理工程S2で温度上昇した半導体基板1を冷却する冷却工程S3、冷却された半導体基板1に対して各種マークを描画印刷する印刷工程S4、各種マークが印刷された半導体基板1に対して後処理を施す後処理工程S5、後処理が施された半導体基板1を収納容器18に収納する収納工程S6を主体に構成される。
つまり、把持部13a及び半導体基板1の回転に伴って、半導体基板1との干渉を避けるために周辺機器の離間距離を小さくすることで、装置の大型化を避けることができるとともに、遠心力により把持部13aに対して半導体基板1がずれることを防止でき、安定した搬送を実施することが可能になる。また、半導体基板1に対する把持力(挟持力)を小さくすることができるため、昇降部111の駆動力も小さくすることができ、一層の小型化を図ることができる。
また、光源も同様に、可視光等の活性光を射出する種々の活性光光源を用いること、つまり活性光線照射部を用いることができる。
Claims (5)
- 保持面で基材を保持するテーブル部を有し、前記テーブル部で保持した前記基材に対して印刷に関する所定の処理を行う処理装置と、
前記テーブル部の前記保持面に対して出没自在、且つ前記保持面に沿う方向に間隔をあけて設けられ、それぞれが前記基材の下面を吸着する複数の吸着部と、
前記複数の吸着部を一括的に昇降させる昇降装置と、
前記吸着部の昇降に応じて前記吸着部の吸着を制御する制御部と、
を備えることを特徴とする印刷装置。 - 請求項1記載の印刷装置において、
前記吸着部は、可撓性材料で形成されることを特徴とする印刷装置。 - 請求項1または2記載の印刷装置において、
前記基材を下方から互いに間隔をあけて支持する複数の支持部を有し、前記基材を前記テーブル部に搬送する搬送装置を備え、
前記複数の吸着部は、前記複数の支持部の配置間隔と略同一の間隔をあけて配置されることを特徴とする印刷装置。 - 請求項1から3のいずれか一項に記載の印刷装置において、
前記所定の処理は、前記基材に対して活性光線で硬化する液体の液滴を吐出する吐出処理を含むことを特徴とする印刷装置。 - 請求項4記載の印刷装置において、
前記吐出処理では、前記基材の表面に設けられた半導体装置に前記液滴を塗布することを特徴とする印刷装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011075813A JP2012206476A (ja) | 2011-03-30 | 2011-03-30 | 印刷装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011075813A JP2012206476A (ja) | 2011-03-30 | 2011-03-30 | 印刷装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012206476A true JP2012206476A (ja) | 2012-10-25 |
Family
ID=47186656
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011075813A Withdrawn JP2012206476A (ja) | 2011-03-30 | 2011-03-30 | 印刷装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012206476A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108556468A (zh) * | 2018-03-22 | 2018-09-21 | 苏州河图电子科技有限公司 | 一种移印机胶头自动更换机构 |
| JP2021070223A (ja) * | 2019-10-30 | 2021-05-06 | セーレン株式会社 | インクジェット記録装置 |
| JP7551125B2 (ja) | 2021-09-07 | 2024-09-17 | 株式会社トライテック | 吸着搬送装置 |
| JP7551126B2 (ja) | 2021-09-07 | 2024-09-17 | 株式会社トライテック | 吸着搬送装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312948A (ja) * | 1989-06-12 | 1991-01-21 | Nikon Corp | 基板ホルダ |
| JPH05190414A (ja) * | 1992-01-17 | 1993-07-30 | Nikon Corp | 基板吸着装置 |
| JPH06169007A (ja) * | 1992-11-27 | 1994-06-14 | Mitsubishi Electric Corp | 半導体製造装置 |
| JP2000332376A (ja) * | 1999-05-25 | 2000-11-30 | Mitsubishi Electric Corp | 半導体装置のマーキング方法 |
| JP2003045944A (ja) * | 2001-07-27 | 2003-02-14 | Canon Inc | 基板保持装置、基板受渡し方法とこれを用いた露光装置、及びデバイスの製造方法 |
| JP2004179399A (ja) * | 2002-11-27 | 2004-06-24 | Seiko Epson Corp | 基板固定方法、基板固定装置、印刷装置および表示装置製造方法 |
| JP2007048828A (ja) * | 2005-08-08 | 2007-02-22 | Murata Mfg Co Ltd | 板状体の変形処理装置及び該板状体の変形処理方法 |
| JP2008091568A (ja) * | 2006-09-29 | 2008-04-17 | Fujifilm Corp | 基板載置装置及び方法 |
-
2011
- 2011-03-30 JP JP2011075813A patent/JP2012206476A/ja not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312948A (ja) * | 1989-06-12 | 1991-01-21 | Nikon Corp | 基板ホルダ |
| JPH05190414A (ja) * | 1992-01-17 | 1993-07-30 | Nikon Corp | 基板吸着装置 |
| JPH06169007A (ja) * | 1992-11-27 | 1994-06-14 | Mitsubishi Electric Corp | 半導体製造装置 |
| JP2000332376A (ja) * | 1999-05-25 | 2000-11-30 | Mitsubishi Electric Corp | 半導体装置のマーキング方法 |
| JP2003045944A (ja) * | 2001-07-27 | 2003-02-14 | Canon Inc | 基板保持装置、基板受渡し方法とこれを用いた露光装置、及びデバイスの製造方法 |
| JP2004179399A (ja) * | 2002-11-27 | 2004-06-24 | Seiko Epson Corp | 基板固定方法、基板固定装置、印刷装置および表示装置製造方法 |
| JP2007048828A (ja) * | 2005-08-08 | 2007-02-22 | Murata Mfg Co Ltd | 板状体の変形処理装置及び該板状体の変形処理方法 |
| JP2008091568A (ja) * | 2006-09-29 | 2008-04-17 | Fujifilm Corp | 基板載置装置及び方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108556468A (zh) * | 2018-03-22 | 2018-09-21 | 苏州河图电子科技有限公司 | 一种移印机胶头自动更换机构 |
| CN108556468B (zh) * | 2018-03-22 | 2023-08-22 | 苏州河图电子科技有限公司 | 一种移印机胶头自动更换机构 |
| JP2021070223A (ja) * | 2019-10-30 | 2021-05-06 | セーレン株式会社 | インクジェット記録装置 |
| JP7386044B2 (ja) | 2019-10-30 | 2023-11-24 | セーレン株式会社 | インクジェット記録装置 |
| JP7551125B2 (ja) | 2021-09-07 | 2024-09-17 | 株式会社トライテック | 吸着搬送装置 |
| JP7551126B2 (ja) | 2021-09-07 | 2024-09-17 | 株式会社トライテック | 吸着搬送装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5741078B2 (ja) | 印刷装置 | |
| US8783848B2 (en) | Marking device, manufacturing device, and marking method | |
| JP2012206476A (ja) | 印刷装置 | |
| JP2012139655A (ja) | 印刷装置 | |
| JP2012171179A (ja) | 印刷装置 | |
| JP2012183595A (ja) | 搬送装置及び印刷装置 | |
| CN102555462B (zh) | 印刷方法及印刷装置 | |
| JP5776235B2 (ja) | 印刷装置 | |
| JP2011125797A (ja) | 液滴吐出装置 | |
| JP5682400B2 (ja) | 印刷装置 | |
| JP5682421B2 (ja) | 印刷装置 | |
| JP5923863B2 (ja) | 搬送装置及び印刷装置 | |
| JP5754181B2 (ja) | 印刷装置 | |
| JP2012206088A (ja) | 液滴吐出装置及び印刷装置 | |
| JP5891592B2 (ja) | 印刷装置 | |
| JP5742295B2 (ja) | 印刷装置 | |
| JP2012213742A (ja) | 印刷装置 | |
| JP2012206089A (ja) | 液滴吐出装置及び印刷装置 | |
| JP2015128902A (ja) | 印刷装置 | |
| JP2012166150A (ja) | 印刷方法及び印刷装置 | |
| JP2012187462A (ja) | 印刷方法及び印刷装置 | |
| JP2012213952A (ja) | 印刷装置 | |
| JP2011139977A (ja) | 描画方法 | |
| JP5891579B2 (ja) | 印刷装置及び印刷方法 | |
| JP2014009094A (ja) | 基板搬送装置及び基板処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140307 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150901 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20151028 |