JP2012206797A - フォークリフト用荷重測定装置 - Google Patents
フォークリフト用荷重測定装置 Download PDFInfo
- Publication number
- JP2012206797A JP2012206797A JP2011071932A JP2011071932A JP2012206797A JP 2012206797 A JP2012206797 A JP 2012206797A JP 2011071932 A JP2011071932 A JP 2011071932A JP 2011071932 A JP2011071932 A JP 2011071932A JP 2012206797 A JP2012206797 A JP 2012206797A
- Authority
- JP
- Japan
- Prior art keywords
- load
- value
- predetermined time
- calculation
- forklift
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005259 measurement Methods 0.000 claims description 38
- 238000001514 detection method Methods 0.000 claims description 7
- 238000010276 construction Methods 0.000 abstract 1
- 238000004891 communication Methods 0.000 description 5
- 230000000630 rising effect Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
Images



Landscapes
- Forklifts And Lifting Vehicles (AREA)
Abstract
【課題】構成が簡単で、荷受け部に積載された荷物の重量を精度よく測定することのできるフォークリフト用荷重測定装置を提供する。
【解決手段】荷受け部31に付加された荷重を検出する荷重検出器20と、荷重検出器から出力された検出信号を受信し、所定時間間隔毎の荷重測定値を得ると共に、荷重測定値の変化量を算出し、変化量が所定の時間、所定の値以下となったときに、所定の時間における荷重測定値に基づいて荷重計算値を算出して出力する演算制御部12とを備えるフォークリフト用荷重測定装置10。演算制御部は、所定の時間経過後、さらに第2の所定時間、荷重測定値の変化量が所定の値以下となったときに、第1の所定の時間における荷重測定値に基づいて荷重計算値を算出して出力することができる。演算制御部は、第1の所定の時間における荷重測定値の平均値又は第1の所定の時間におけるいずれかの荷重測定値を荷重計算値とすることができる。
【選択図】図2
【解決手段】荷受け部31に付加された荷重を検出する荷重検出器20と、荷重検出器から出力された検出信号を受信し、所定時間間隔毎の荷重測定値を得ると共に、荷重測定値の変化量を算出し、変化量が所定の時間、所定の値以下となったときに、所定の時間における荷重測定値に基づいて荷重計算値を算出して出力する演算制御部12とを備えるフォークリフト用荷重測定装置10。演算制御部は、所定の時間経過後、さらに第2の所定時間、荷重測定値の変化量が所定の値以下となったときに、第1の所定の時間における荷重測定値に基づいて荷重計算値を算出して出力することができる。演算制御部は、第1の所定の時間における荷重測定値の平均値又は第1の所定の時間におけるいずれかの荷重測定値を荷重計算値とすることができる。
【選択図】図2
Description
本発明は、フォークリフトのフォーク等の荷受け部に積載された荷物の重量を測定するフォークリフト用荷重測定装置に関する。
従来、工場、倉庫等において、部品、製品、荷物等の積み降ろしを行うためフォークリフトが用いられている。このフォークリフトは、図4に示すように、荷受け部として昇降するフォーク31と、フォーク31を昇降させるための油圧シリンダ32と、マスト33等を備え、運転者が荷役レバー等を操作して油圧シリンダ32への油圧を上下させてフォーク31及びマスト33を昇降させると共に、フォークリフト30を前進、後進、右折及び左折させて荷物の積み降ろし、搬送等を行う。
上記フォークリフトのフォークに積載された荷物の重量を測定するにあたって、特許文献1には、リフティングシリンダの油圧を検出してその検出値を電気信号として出力する検出器と、フォークで持ち上げた重量物の重量を検出器からの電気信号に基づいて演算する演算手段等を備える荷重測定装置が提案されている。
また、特許文献2には、作業車両に取り付けられた荷重測定用センサからの信号を記憶手段に格納した後、波形処理を施してノイズを除去し、作業用車両を停止させることなく、荷受け部に掛かる荷重を正確に測定することができ、作業車両の運用状況を正確に把握することのできる作業車両用荷重測定装置が記載されている。
しかし、上記従来の荷重測定装置においては、フォーク等の荷受け部に荷物を積載後、荷受け部を上昇させている間に油圧が荷重相当以上の油圧になるため、荷受け部に掛かる荷重を正確に測定できないという問題があった。
また、荷受け部を停止した場合でも、停止後、油圧が徐々に下がるような油圧変動が生ずるため、荷受け部を停止して一定時間経過後に荷重を測定しようとしても油圧の変動等により正確に測定できないという問題があった。
さらに、上記問題を避けるため、荷受け部に積載された荷物の重量を測定するにあたって、フォークの上昇下降動作や前進後進等の動作をフォークリフトからの信号で判断すると、フォークリフトから複数の信号を検出する必要があり、荷重測定装置の構成が複雑になるという問題があった。
そこで、本発明は、上記従来のフォークリフト用荷重測定装置における問題点に鑑みてなされたものであって、簡単な構成で、フォークに積載された荷物の重量を精度よく測定することのできるフォークリフト用荷重測定装置を提供することを目的とする。
上記目的を達成するため、本発明は、フォークリフト用荷重測定装置であって、荷受け部に付加された荷重を検出する荷重検出器と、該荷重検出器から出力された検出信号を受信し、所定時間間隔毎の荷重測定値を得ると共に、該荷重測定値の変化量を算出し、該変化量が所定の時間、所定の値以下となったときに、該所定の時間における荷重測定値に基づいて荷重計算値を算出して出力する演算制御部とを備えることを特徴とする。
そして、本発明によれば、荷重変化量が小さくなる時間を判断することで、荷受け部の上昇動作の時間帯の荷重検出器からの信号を避け、荷受け部停止直後の荷重を測定することができるため、荷受け部に付加された荷重を精度よく測定することができる。
また、荷重検出器から出力された検出信号のみに基づいて演算制御部で荷重計算値を算出することができるため、荷受け部の上昇下降動作や前進後進等の動作を判断するための信号が不要となり、構成が簡単なフォークリフト用荷重測定装置を提供することができる。
上記フォークリフト用荷重測定装置において、前記演算制御部は、前記所定の時間経過後、さらに第2の所定時間、前記荷重測定値の変化量が所定の値以下となったときに、前記第1の所定の時間における荷重測定値に基づいて荷重計算値を算出して出力することができる。荷受け部が等速で上昇する場合には、一時的に荷重測定値の変化量が所定の時間、所定の値以下となる場合もあるので、そのような時間帯での測定を回避し、荷受け部に付加された荷重をさらに精度よく測定することができる。
また、上記フォークリフト用荷重測定装置において、前記演算制御部は、前記第1の所定の時間における荷重測定値の平均値を荷重計算値として出力することができる。これにより、第1の所定の時間における荷重測定値のばらつきを考慮した荷重計算値を得ることができる。
さらに、上記フォークリフト用荷重測定装置において、前記演算制御部は、前記第1の所定の時間におけるいずれかの荷重測定値を荷重計算値として出力することができる。これにより、平均値を荷重計算値とする場合に比較して若干測定精度が低下する可能性があるが、少なくとも、荷受け部の上昇動作の時間帯の荷重検出器からの信号を避け、荷受け部に付加された荷重を精度よく測定することができる。
以上のように、本発明によれば、構成が簡単で、荷受け部に積載された荷物の重量を精度よく測定することのできるフォークリフト用荷重測定装置を提供することができる。
次に、本発明を実施するための形態について図面を参照しながら説明する。尚、以下の説明においては、図4に示したフォークリフトに本発明にかかるフォークリフト用荷重測定装置を搭載した場合について説明する。
図1は、本発明にかかるフォークリフト用荷重測定装置の一実施の形態を示し、この荷重測定装置10は、荷重検出器20からのアナログ信号をデジタル信号に変換するAD変換器11と、CPU等の演算手段、及びメモリ等の記憶手段を備えた演算制御部12と、図示されないネットワークに接続され、管理サーバ等の外部機器と通信を行うための通信装置13と、荷重計算値を表示する液晶表示パネルからなる表示部14と、タッチパネルを備える入力部15とを有する。
荷重検出器20は、フォーク31及びマスト33を昇降させるための油圧シリンダ32の油圧を検出する油圧検出器であって、検出した油圧に応じた検出信号をAD変換器11に出力する。
AD変換器11は、荷重検出器20から受信したアナログの検出信号をデジタル信号に変換して演算制御部12に出力する。
演算制御部12は、AD変換器11から受信したデジタルの検出信号に基づいて、後述する種々の演算を行った結果を荷重計算値として出力するために備えられ、算出された荷重測定結果は、通信装置13及び表示部14に送信される。
通信装置13は、演算制御部12で算出された荷重計算値を受信し、ネットワークを介して管理サーバ等に送信するために備えられ、送信された荷重計算値は、管理サーバ等で利用される。
表示部14は、演算制御部12で算出された荷重計算値を受信し、フォークリフト30の運転者に視認可能に液晶表示パネルに表示する。
入力部15は、演算制御部12での演算に必要な各種設定値等をタッチパネルを介して入力するために備えられる。
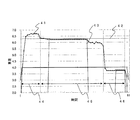
次に、上記構成を有するフォークリフト用荷重測定装置の動作について、図2及び図3を参照しながら説明する。尚、図3において、参照番号41は、荷重検出器20からの信号に基づいて荷重測定装置10で算出した荷重計算結果(1秒毎の計算値)、42は実際にフォーク31に積載した荷物の重量、43は本発明によって求めた荷重計算値(最終的な計算値)である。また、44はフォーク31が上昇している時間、45はフォーク31が停止している時間、46はフォーク31を下降させた時間を各々示す。
まず、図2のステップS1にて、荷重測定装置10のキャリブレーションを実施する。荷重検出器20の出力をそのまま計算すると、フォーク31の重量分も加味された状態で荷重測定されるためである。
キャリブレーションは対話式で実施され、フォークリフト30が停止した状態でフォーク31を上昇させ、地面に接触しない高さで停止させた後、キャリブレーション実施ボタンを押下し、演算制御部12で荷重検出器20の出力電圧を一定時間計測し、それらの平均値を求めることでキャリブレーション値とする。
次に、ステップS2で荷重検出器20の出力に基づいて、下記の式(1)にて1秒毎に荷重計算を実施する。
L=(Pv−Pc)×π×(d/2)2×A ・・・式(1)
ここで、Lはフォーク31に積載された荷物の重量、Pvは現在の荷重検出器出力電圧、Pcはキャリブレーション電圧、dは油圧シリンダの直径、Aは荷重検出器20の油圧検出範囲や出力電圧範囲等から得られる係数である。
L=(Pv−Pc)×π×(d/2)2×A ・・・式(1)
ここで、Lはフォーク31に積載された荷物の重量、Pvは現在の荷重検出器出力電圧、Pcはキャリブレーション電圧、dは油圧シリンダの直径、Aは荷重検出器20の油圧検出範囲や出力電圧範囲等から得られる係数である。
図3の41が式(1)にて1秒毎に計算された荷重結果を示すグラフである。フォーク31が上昇している時間44は、実際の重量より重い測定結果となり、フォーク31が下降している時間46は、実際の重量より軽い測定結果となることが判る。
次に、フォーク31に荷物が積載されたか否かを判断するため、ステップS3にてキャリブレーション値に基づいて基準値を定め、荷重計算結果が基準値以上になったか否かを判断する。
次に、ステップS4にて、1秒毎の荷重計算結果を比較し。荷重測定値の変化量が基準値以下になるか否かを判断する。荷重測定値の変化量が基準値以上の場合には、フォーク31が上昇していると判断し、荷重計算結果を破棄することで、図3のフォーク31が上昇している時間44における荷重の測定を避けることができる。
また、荷重測定値の変化量が基準値以下になった時点から一定時間(A秒間)連続したか否かをステップS5で判定し、A秒間連続した場合には、ステップS6にて荷重測定値の平均値を算出し、荷重計算値として一時保持する。
しかし、フォーク31が等速で上昇する場合には、一時的にA秒間連続して荷重測定値の変化量が基準値以下になることがあるため、さらに一定時間(B秒間)、荷重測定値の変化量が基準値以下となる場合が連続したか否かをステップS7で判定する。
フォーク31が上昇から停止する時点で荷重測定値の変化量が基準値以上になるため、ステップS7での判定で、荷重測定値の変化量が基準値以下となる場合がB秒間連続しなかった場合には、ステップS6で求めた荷重計算値は、フォーク31が上昇中のものであったと判断し、荷重計算結果を破棄し、ステップS5から判定をやり直す。一方、ステップS7の判定で、荷重測定値の変化量が基準値以下となる場合がB秒間連続した場合には、ステップS6で求めた荷重計算値は、図3のフォーク31が停止している時間45での測定結果であると判断し、表示部14にその荷重計算値を表示し、通信装置13を介してネットワーク経由で管理サーバ等に送信される。
以上のように、本実施の形態では、フォーク31の上昇している時間44における荷重の測定を避けることができ、フォーク31が停止している時間45の安定した先頭部分の荷重計算結果に基づく荷重計算値を算出することができる。
尚、上記実施の形態においては、A秒間連続して荷重測定値の変化量が基準値以下になったことを判定した後、さらに一定時間(B秒間)荷重測定値の変化量が基準値以下となる場合が連続したか否かを判定しているが、必ずしも第2の一定時間(B秒間)の荷重測定値の変化量の判定は必要ではなく、フォーク31が等速で上昇する場合の特殊な状態を考慮しなければ、第1の一定時間(A秒間)の荷重測定値の変化量の判定のみ行うことも可能である。
また、上記実施の形態においては、A秒間の荷重測定値の平均値を算出して荷重計算値としているが、必ずしも平均値を算出する必要はなく、A秒間のいずれかの荷重測定値を荷重計算値とすることもできる。この場合には、平均値を荷重計算値とする場合に比較して若干測定精度が低下する可能性があるが、少なくとも、フォーク31の上昇動作の時間帯の荷重検出器20からの信号を避け、フォーク31に積載した荷物の重量を精度よく測定することができる。
10 荷重測定装置
11 AD変換器
12 演算制御部
13 通信装置
14 表示部
15 入力部
20 荷重検出器
30 フォークリフト
31 フォーク
32 油圧シリンダ
33 マスト
11 AD変換器
12 演算制御部
13 通信装置
14 表示部
15 入力部
20 荷重検出器
30 フォークリフト
31 フォーク
32 油圧シリンダ
33 マスト
Claims (4)
- 荷受け部に付加された荷重を検出する荷重検出器と、
該荷重検出器から出力された検出信号を受信し、所定時間間隔毎の荷重測定値を得ると共に、該荷重測定値の変化量を算出し、該変化量が所定の時間、所定の値以下となったときに、該所定の時間における荷重測定値に基づいて荷重計算値を算出して出力する演算制御部とを備えることを特徴とするフォークリフト用荷重測定装置。 - 前記演算制御部は、前記所定の時間経過後、さらに第2の所定時間、前記荷重測定値の変化量が所定の値以下となったときに、前記第1の所定の時間における荷重測定値に基づいて荷重計算値を算出して出力することを特徴とする請求項1に記載のフォークリフト用荷重測定装置。
- 前記演算制御部は、前記第1の所定の時間における荷重測定値の平均値を荷重計算値として出力することを特徴とする請求項1又は2に記載のフォークリフト用荷重測定装置。
- 前記演算制御部は、前記第1の所定の時間におけるいずれかの荷重測定値を荷重計算値として出力することを特徴とする請求項1又は2に記載のフォークリフト用荷重測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011071932A JP2012206797A (ja) | 2011-03-29 | 2011-03-29 | フォークリフト用荷重測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011071932A JP2012206797A (ja) | 2011-03-29 | 2011-03-29 | フォークリフト用荷重測定装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012206797A true JP2012206797A (ja) | 2012-10-25 |
Family
ID=47186897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011071932A Pending JP2012206797A (ja) | 2011-03-29 | 2011-03-29 | フォークリフト用荷重測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012206797A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014237519A (ja) * | 2013-06-10 | 2014-12-18 | ユニキャリア株式会社 | 産業車両用荷重計測装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56108918A (en) * | 1980-01-31 | 1981-08-28 | Shimadzu Corp | Electronic balance |
| JPS6391523A (ja) * | 1986-10-06 | 1988-04-22 | Toyota Autom Loom Works Ltd | 荷重表示装置 |
-
2011
- 2011-03-29 JP JP2011071932A patent/JP2012206797A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56108918A (en) * | 1980-01-31 | 1981-08-28 | Shimadzu Corp | Electronic balance |
| JPS6391523A (ja) * | 1986-10-06 | 1988-04-22 | Toyota Autom Loom Works Ltd | 荷重表示装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014237519A (ja) * | 2013-06-10 | 2014-12-18 | ユニキャリア株式会社 | 産業車両用荷重計測装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10745261B2 (en) | Forklift truck | |
| CN106536177B (zh) | 控制系统、压力机及压力机的控制方法 | |
| CN101934999B (zh) | 一种用于叉车测高及称重的装置及称重方法 | |
| JP3842779B2 (ja) | 油圧昇降装置の積荷支持手段上の荷重を測定する方法 | |
| EP3379224A1 (en) | Optical characteristic measuring device | |
| JP2012206797A (ja) | フォークリフト用荷重測定装置 | |
| SE540616C2 (sv) | Förfarande för att fastställa lyftmastsvängningar samt industritruck | |
| JP2013164396A (ja) | ダンプトラックの応力演算システム | |
| KR101239354B1 (ko) | 글로브박스 내의 기압변화 보정기능을 가지는 전자저울 | |
| CN102770741B (zh) | 利用了根据工作油温度变化的补偿压力的货物重量测定装置及方法 | |
| JP2016148532A (ja) | 計量装置 | |
| JP2010210296A (ja) | 車両計量装置 | |
| CN111943090A (zh) | 一种叉车电子秤 | |
| US8019516B2 (en) | Method for measuring the useful load of a telehandler | |
| JPH06156996A (ja) | フォークリフトの荷重検出装置 | |
| KR101368789B1 (ko) | 호이스트 구동상태 검출 시스템 및 그 검출 방법 | |
| CN102145858A (zh) | 链式起重系统称重报警方法及其装置 | |
| CN212503843U (zh) | 一种叉车电子秤 | |
| JP2005061984A (ja) | 建設機械の荷重計測装置 | |
| JP2008037601A (ja) | 移動手摺の滑り検知方法およびこの方法を採用した移動手摺の滑り検知装置 | |
| JP2023004710A (ja) | 物品搬送装置及び物品保管装置 | |
| KR100856939B1 (ko) | 지게차용 실시간 화물 중량 측정장치 | |
| CN201637470U (zh) | 称重复合计量装置 | |
| JP4750378B2 (ja) | 作業車両用荷重測定装置 | |
| KR20250137397A (ko) | 전동 리프트의 적재물 무게 측정 장치 및 적재물 무게 측정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140325 |