JP2012208038A - 感圧抵抗部材および感圧センサ - Google Patents
感圧抵抗部材および感圧センサ Download PDFInfo
- Publication number
- JP2012208038A JP2012208038A JP2011074703A JP2011074703A JP2012208038A JP 2012208038 A JP2012208038 A JP 2012208038A JP 2011074703 A JP2011074703 A JP 2011074703A JP 2011074703 A JP2011074703 A JP 2011074703A JP 2012208038 A JP2012208038 A JP 2012208038A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- resistance member
- sensitive resistance
- sensitive
- convex portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000002245 particle Substances 0.000 claims abstract description 15
- 229920002379 silicone rubber Polymers 0.000 claims description 5
- 239000004945 silicone rubber Substances 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 abstract description 13
- 229920001971 elastomer Polymers 0.000 description 15
- 150000001875 compounds Chemical class 0.000 description 10
- 230000000052 comparative effect Effects 0.000 description 6
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 4
- 239000004744 fabric Substances 0.000 description 4
- 239000013500 performance material Substances 0.000 description 4
- 229910052799 carbon Inorganic materials 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000003746 surface roughness Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 239000003431 cross linking reagent Substances 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- -1 polyethylene terephthalate Polymers 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 239000004952 Polyamide Substances 0.000 description 1
- 239000004697 Polyetherimide Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229920005549 butyl rubber Polymers 0.000 description 1
- 239000006229 carbon black Substances 0.000 description 1
- 239000002041 carbon nanotube Substances 0.000 description 1
- 229910021393 carbon nanotube Inorganic materials 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 239000007772 electrode material Substances 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 229920002647 polyamide Polymers 0.000 description 1
- 229920000728 polyester Polymers 0.000 description 1
- 229920001601 polyetherimide Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images


Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
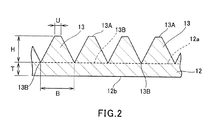
【解決手段】 導電性粒子を含有する弾性部材からなる感圧抵抗部材11を、平板状の基部12と、この基部12の一方の面12aに位置する凸部13と、を備えたものとし、凸部13の基部12側の底部13Bの形状を多角形とし、凸部13の頂部13Aを平坦面とするとともに、この頂部13Aの面積は底部13Bの面積よりも小さいものとし、さらに、基部12の厚みTと、凸部13の高さ(基部12の面12aに垂直な方向における底部13Bから頂部13Aまでの距離)Hとの間に、0.05≦T/H≦0.5の関係が成立するように構成する。
【選択図】 図1
Description
このため、導電性粒子を含有させた感圧抵抗部材の表面に凹凸形状を設け、この凹凸形状を構成する凸部が、微小な外力によって変形することを利用した感圧センサがある(特許文献1)。また、電極間に導電性ゴムからなる半球面状の導電性部材を配置し、電極間距離を小さくする方向の外力が加わることにより、半球面状の導電性部材が押しつぶされ、導電性部材と電極との接触面積が増大して表面接触抵抗が小さくなることを利用した感圧センサがある(特許文献2)。
本発明は、上記のような実情に鑑みてなされたものであり、広い範囲の圧力変化に対して安定した圧力−電気抵抗変換が得られる感圧抵抗部材と、それを用いた感圧センサを提供することを目的とする。
本発明の他の態様として、前記弾性部材のDuro−A硬度が15度〜60度の範囲であるような構成とした。
本発明の他の態様として、前記弾性部材は、シリコーンゴムを含有するような構成とした。
本発明の感圧センサは、上述のいずれかの感圧抵抗部材と、該感圧抵抗部材を両側から挟むように配置された一対の電極と、該一対の電極を両側から挟むように配置された電気絶縁性フィルムと、を備えるような構成とした。
また、本発明の感圧センサは、微小な印加圧力から大きな印加圧力まで安定して検出することができる。
[感圧抵抗部材]
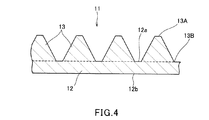
図1は本発明の感圧抵抗部材の一例を示す平面図であり、図2は図1に示される感圧抵抗部材のI−I線における縦断面図である。図1および図2において、本発明の感圧抵抗部材11は、導電性粒子を含有する弾性部材からなり、平板状の基部12と、この基部12の一方の面12a(図2に鎖線で示される面)に位置する凸部13と、を備えている。凸部13は、基部12側の底部13B(図2に鎖線で示される部位)の形状が多角形であり、また、凸部13の頂部13Aは平坦面であるとともに、この頂部13Aの面積は、凸部13の底部13Bの面積よりも小さいものである。また、基部12の厚みTと、凸部13の高さ(基部12の面12aに垂直な方向における底部13Bから頂部13Aまでの距離)Hとの間には、0.05≦T/H≦0.5の関係が成立する。
感圧抵抗部材11を構成する基部12の面12bは、例えば、平均表面粗さRaが1.6μm以下であるような面とすることができる。尚、本発明における平均表面粗さRaの測定は、 東京精密(株)製 SURFCOM 2800Eによって行うものとする。
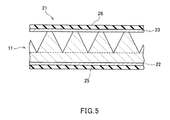
図5は、本発明の感圧センサの一実施形態を示す断面図である。図5において、感圧センサ21は、上述の本発明の感圧抵抗部材11を使用した例であり、感圧抵抗部材11を両側から挟むように配置された一対の電極22,23と、この一対の電極を両側から挟むように配置された電気絶縁性フィルム25,26と、を備えている。
電極22,23は、従来公知の電極材料を使用することができ、例えば、銅、銀、金、ステンレス鋼等、あるいは、これらの合金等を挙げることができる。
また、電極22,23の形状、大きさ等は任意に設定することができ、例えば、電極22,23共に平板形状であってもよく、あるいは、一方がストライプ形状であってもよい。また、電極22,23共にストライプ形状であり、かつ、ストライプの軸方向が相互に直交するようなもの等であってよい。
上述の実施形態は例示であり、本発明はこれらの実施形態に限定されるものではない。
[実施例1]
導電性粒子として導電性カーボンを含有する導電性シリコーンゴムポリマー(モメンティブ・パフォーマンス・マテリアルズ・ジャパン社製 XE−23−A6001)100重量部と、架橋剤(モメンティブ・パフォーマンス・マテリアルズ・ジャパン社製 TC−8)1.8重量部をオープンロールで混練し、ゴムコンパウンドを得た。得られたゴムコンパウンドを所定の金型に充填し、170℃で10分間プレス架橋することにより、導電性粒子を含有する弾性部材からなり、図1および図2に示されるような、截頭四角錐である凸部を複数備えた感圧抵抗部材を得た。
導電性粒子として導電性カーボンを含有する導電性シリコーンゴムポリマー(モメンティブ・パフォーマンス・マテリアルズ・ジャパン社製 XE−23−A2637)100重量部と、架橋剤(モメンティブ・パフォーマンス・マテリアルズ・ジャパン社製 TC−8)2.5重量部をオープンロールで混練し、ゴムコンパウンドを得た。得られたゴムコンパウンドを用いて、実施例1と同様にして、感圧抵抗部材を得た。
この感圧抵抗部材における比T/H、比B/H、比B/Uは、実施例1の感圧抵抗部材における比T/H、比B/H、比B/Uと同じであり、Duro−A硬度は50度であった。
実施例1と同様にしてゴムコンパウンドを得た。得られたゴムコンパウンドを平板金型間で170℃で10分間プレス架橋することにより、厚みが0.5mmで両面が平坦な感圧抵抗部材を得た。この感圧抵抗部材のDuro−A硬度は15度であった。
実施例1と同様にしてゴムコンパウンドを得た。得られたゴムコンパウンドの両面を、細かい布地のフッ素樹脂含浸クロス(中興化成工業(株)製 FGF−400−10)で押圧し、170℃で10分間プレス架橋することにより、両面に凸形状を有する感圧抵抗部材を得た。
この感圧抵抗部材は、基部の厚みTが0.2mm、凸部の高さHが0.05mmであり、比T/Hは4、比B/Hは30、比B/Uは2であり、Duro−A硬度は15度であった。
実施例1と同様にしてゴムコンパウンドを得た。得られたゴムコンパウンドの両面を、粗い布地のフッ素樹脂含浸クロス(中興化成工業(株)製 FGF−500−35)で押圧し、170℃で10分間プレス架橋することにより、両面に凸形状を有する感圧抵抗部材を得た。
この感圧抵抗部材は、基部の厚みTが0.1mm、凸部の高さHが0.15mmであり、比T/Hは0.7、比B/Hは13、比B/Uは2であり、Duro−A硬度は15度であった。
上述のように作製した感圧抵抗部材(実施例1、2および比較例1〜3)を用いて、感圧センサを作製した。すなわち、感圧抵抗部材を縦10mm、横20mmの方形状とし、この感圧抵抗部材の両面に縦80mm、横80mmの電極板(金めっき処理を施した厚み3mmの銅板)を配して挟持し、さらに、電極板を挟むように電気絶縁性フィルム(三井化学東セロ(株)製 セパレーター SP−PET)を配設した。

これに対して、比較例1〜3の感圧センサでは、ストローク率が小さい段階で抵抗値変化率が高い状態となり、印加荷重(ストローク率)が大きい範囲での安定した抵抗値変化が得られないものであった。
12…基部
13…凸部
13A…頂部
13B…底部
21…感圧センサ
22,23…電極
25,26…電気絶縁性フィルム
Claims (5)
- 導電性粒子を含有する弾性部材からなる感圧抵抗部材において、
平板状の基部と、該基部の一方の面に位置する凸部と、を備え、該凸部は前記基部側の底部の形状が多角形であり、前記凸部の頂部は平坦面であるとともに、該頂部の面積は前記底部の面積よりも小さく、前記基部の厚みTと、前記凸部の高さ(基部の面に垂直な方向における底部から頂部までの距離)Hとの間に、0.05≦T/H≦0.5の関係が成立することを特徴とする感圧抵抗部材。 - 前記凸部の底部の長さをBとしたときに、前記凸部の高さHとの間に、1≦B/H≦5の関係が成立し、かつ、前記凸部の頂部の長さをUとしたときに、前記凸部の底部の長さBとの間に、2≦B/U≦25の関係が成立することを特徴とする請求項1に記載の感圧抵抗部材。
- 前記弾性部材のDuro−A硬度が15度〜60度の範囲であることを特徴とする請求項1または請求項2に記載の感圧抵抗部材。
- 前記弾性部材は、シリコーンゴムを含有することを特徴とする請求項1乃至請求項3のいずれかに記載の感圧抵抗部材。
- 請求項1乃至請求項4のいずれかに記載の感圧抵抗部材と、該感圧抵抗部材を両側から挟むように配置された一対の電極と、該一対の電極を両側から挟むように配置された電気絶縁性フィルムと、を備えることを特徴とした感圧センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011074703A JP2012208038A (ja) | 2011-03-30 | 2011-03-30 | 感圧抵抗部材および感圧センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011074703A JP2012208038A (ja) | 2011-03-30 | 2011-03-30 | 感圧抵抗部材および感圧センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012208038A true JP2012208038A (ja) | 2012-10-25 |
Family
ID=47187903
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011074703A Pending JP2012208038A (ja) | 2011-03-30 | 2011-03-30 | 感圧抵抗部材および感圧センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012208038A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9806538B2 (en) | 2012-12-27 | 2017-10-31 | Murata Manufacturing Co., Ltd. | Measurement circuit and measurement apparatus for wireless power transmission system |
| WO2018120384A1 (zh) * | 2016-12-28 | 2018-07-05 | 中国科学院深圳先进技术研究院 | 压力传感器及其制备方法 |
| JP2020071072A (ja) * | 2018-10-29 | 2020-05-07 | セイコーエプソン株式会社 | 感圧センサーおよびハンド |
| CN114305729A (zh) * | 2021-12-16 | 2022-04-12 | 江苏大学 | 一种用于介入导管的触觉传感器 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60174126U (ja) * | 1984-04-26 | 1985-11-18 | ジェイエスアール株式会社 | 感圧導電性ゴムシ−ト |
| JPS61271706A (ja) * | 1985-05-27 | 1986-12-02 | 藤倉ゴム工業株式会社 | 感圧導電性ゴム |
| JPH03196416A (ja) * | 1989-09-29 | 1991-08-27 | Soken Internatl:Kk | 異方導電性シート |
| JPH0436627A (ja) * | 1990-05-31 | 1992-02-06 | Nitta Ind Corp | 感圧導電性エラストマー組成物とこれを利用して構成した感圧センサ |
| JP2002075063A (ja) * | 2000-08-23 | 2002-03-15 | Jsr Corp | 異方導電性シート |
| JP2006513408A (ja) * | 2003-01-07 | 2006-04-20 | アイイーイー インターナショナル エレクトロニクス アンド エンジニアリング エス.エイ. | 微細構造化面をもつ弾性センサ層で構成される圧力センサ |
-
2011
- 2011-03-30 JP JP2011074703A patent/JP2012208038A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60174126U (ja) * | 1984-04-26 | 1985-11-18 | ジェイエスアール株式会社 | 感圧導電性ゴムシ−ト |
| JPS61271706A (ja) * | 1985-05-27 | 1986-12-02 | 藤倉ゴム工業株式会社 | 感圧導電性ゴム |
| JPH03196416A (ja) * | 1989-09-29 | 1991-08-27 | Soken Internatl:Kk | 異方導電性シート |
| JPH0436627A (ja) * | 1990-05-31 | 1992-02-06 | Nitta Ind Corp | 感圧導電性エラストマー組成物とこれを利用して構成した感圧センサ |
| JP2002075063A (ja) * | 2000-08-23 | 2002-03-15 | Jsr Corp | 異方導電性シート |
| JP2006513408A (ja) * | 2003-01-07 | 2006-04-20 | アイイーイー インターナショナル エレクトロニクス アンド エンジニアリング エス.エイ. | 微細構造化面をもつ弾性センサ層で構成される圧力センサ |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9806538B2 (en) | 2012-12-27 | 2017-10-31 | Murata Manufacturing Co., Ltd. | Measurement circuit and measurement apparatus for wireless power transmission system |
| WO2018120384A1 (zh) * | 2016-12-28 | 2018-07-05 | 中国科学院深圳先进技术研究院 | 压力传感器及其制备方法 |
| JP2020071072A (ja) * | 2018-10-29 | 2020-05-07 | セイコーエプソン株式会社 | 感圧センサーおよびハンド |
| JP7183700B2 (ja) | 2018-10-29 | 2022-12-06 | セイコーエプソン株式会社 | 感圧センサーおよびハンド |
| CN114305729A (zh) * | 2021-12-16 | 2022-04-12 | 江苏大学 | 一种用于介入导管的触觉传感器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9276194B2 (en) | Bonding method for bonding metal plate and piezoelectric body | |
| JP5374984B2 (ja) | 誘電アクチュエータ | |
| JP6696885B2 (ja) | 圧電センサ | |
| EP3194918B1 (en) | Sensing system including a sensing structure | |
| US20060162471A1 (en) | Pressure sensor comprising an elastic sensor layer with a microstructured surface | |
| US12095389B2 (en) | Triboelectric nanogenerator using ionic elastomer | |
| JP2012208038A (ja) | 感圧抵抗部材および感圧センサ | |
| JP6931144B2 (ja) | センサユニット及びセンサ素子の製造方法 | |
| JP6165002B2 (ja) | エラスティックフレキシブルセンサ | |
| CN204156752U (zh) | 一种压电和摩擦电混合发电机 | |
| Stassi et al. | Impedance spectroscopy analysis of the tunnelling conduction mechanism in piezoresistive composites | |
| Bian et al. | A three-electrode structured ionic polymer carbon-composite actuator with improved electromechanical performance | |
| TW200931024A (en) | Probe card | |
| US9832572B2 (en) | Electroactive sound transducer foil having a structured surface | |
| JP2013232293A (ja) | 触覚センサ | |
| JP2021164395A (ja) | ゲルセンサー | |
| DK181377B1 (en) | Tactile sensor, matrix of tactile sensors, and methods for producing the same | |
| KR101594432B1 (ko) | 폴리이미드 유기 유전층을 포함한 정전기력 기반 작동기 | |
| JP6324047B2 (ja) | ゲルアクチュエータ | |
| CN110823084A (zh) | 一种基于碳纳米复合材料的应变片和应变传感器 | |
| Yin et al. | Conductive Composite Hydrogel with Unsymmetrical Structure as Multimodal Triboelectric Nanogenerators for Machine Learning‐Assisted Motion | |
| JP2016109444A (ja) | 力検出装置 | |
| CN218411508U (zh) | 柔性纺织压力传感器、压力识别装置以及压力识别系统 | |
| JP6044989B2 (ja) | アクチュエーターにおける発生駆動力の評価方法 | |
| JP2013101080A (ja) | 触覚センサ用ゴム及び触覚センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140904 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140930 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141120 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150210 |