JP2012242267A - 携帯機器 - Google Patents
携帯機器 Download PDFInfo
- Publication number
- JP2012242267A JP2012242267A JP2011113370A JP2011113370A JP2012242267A JP 2012242267 A JP2012242267 A JP 2012242267A JP 2011113370 A JP2011113370 A JP 2011113370A JP 2011113370 A JP2011113370 A JP 2011113370A JP 2012242267 A JP2012242267 A JP 2012242267A
- Authority
- JP
- Japan
- Prior art keywords
- offset value
- magnetic sensor
- sampling data
- mobile device
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/038—Control and interface arrangements therefor, e.g. drivers or device-embedded control circuitry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
- G01R33/0035—Calibration of single magnetic sensors, e.g. integrated calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C17/00—Compasses; Devices for ascertaining true or magnetic north for navigation or surveying purposes
- G01C17/38—Testing, calibrating, or compensating of compasses
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Measuring Magnetic Variables (AREA)
Abstract
【解決手段】磁気センサと、当該磁気センサとは独立に当該携帯機器の姿勢を検出する姿勢検出センサとを備え、姿勢検出センサにより当該携帯機器が互いに異なる向きを向いていると判定される複数の状態のそれぞれにおいて、磁気センサの出力データをサンプリングデータとして取得し、取得した複数のサンプリングデータに基づいて、磁気センサが地磁気を検出しない場合に出力すると推定されるオフセット値を算出する携帯機器である。
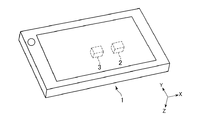
【選択図】図1
Description
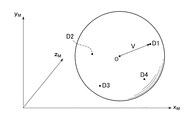
xV=xM−x0
yV=yM−y0
zV=zM−z0
そのため、基準点Oの位置、及び地磁気ベクトルVの大きさに変化がなければ、携帯機器1の向きを変化させて取得した複数のサンプリングデータDは、いずれも出力値空間内において基準点Oを中心として半径が地磁気ベクトルVの大きさに等しい球の表面に存在すると考えられる。
Claims (7)
- 磁気センサを備える携帯機器であって、
前記磁気センサとは独立に当該携帯機器の姿勢を検出する姿勢検出センサと、
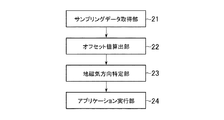
前記姿勢検出センサにより当該携帯機器が互いに異なる向きを向いていると判定される複数の状態のそれぞれにおいて、前記磁気センサの出力データをサンプリングデータとして取得するサンプリングデータ取得手段と、
前記取得した複数のサンプリングデータに基づいて、前記磁気センサが地磁気を検出しない場合に出力すると推定されるオフセット値を算出するオフセット値算出手段と、
を含むことを特徴とする携帯機器。 - 請求項1に記載の携帯機器において、
前記サンプリングデータ取得手段は、前記姿勢検出センサにより前記携帯機器が互いに所定角度以上異なる向きを向いていると判定される複数の状態のそれぞれにおいて、前記サンプリングデータを取得する
ことを特徴とする携帯機器。 - 請求項1又は2に記載の携帯機器において、
前記オフセット値を記憶する記憶部をさらに備え、
前記オフセット値算出手段は、前記複数のサンプリングデータに基づいて新たに算出したオフセット値について、その信頼度を評価し、当該信頼度の評価に応じて前記算出したオフセット値を補正して得られる値により、前記記憶部に記憶されるオフセット値を更新する
ことを特徴とする携帯機器。 - 請求項3に記載の携帯機器において、
前記オフセット値算出手段は、前記記憶部にこれまで記憶されていたオフセット値と、前記新たに算出したオフセット値と、に基づいて、当該新たに算出したオフセット値の信頼度を評価する
ことを特徴とする携帯機器。 - 磁気センサと、前記磁気センサとは独立に当該携帯機器の姿勢を検出する姿勢検出センサと、を備える携帯機器のための磁気センサのキャリブレーション方法であって、
前記姿勢検出センサにより当該携帯機器が互いに異なる向きを向いていると判定される複数の状態のそれぞれにおいて、前記磁気センサの出力データをサンプリングデータとして取得するステップと、
前記取得した複数のサンプリングデータに基づいて、前記磁気センサが地磁気を検出しない場合に出力すると推定されるオフセット値を算出するステップと、
を含むことを特徴とする磁気センサのキャリブレーション方法。 - 磁気センサと、前記磁気センサとは独立に当該携帯機器の姿勢を検出する姿勢検出センサと、を備える携帯機器のための磁気センサのキャリブレーションプログラムであって、
前記姿勢検出センサにより当該携帯機器が互いに異なる向きを向いていると判定される複数の状態のそれぞれにおいて、前記磁気センサの出力データをサンプリングデータとして取得するサンプリングデータ取得手段、及び、
前記取得した複数のサンプリングデータに基づいて、前記磁気センサが地磁気を検出しない場合に出力すると推定されるオフセット値を算出するオフセット値算出手段、
としてコンピュータを機能させるためのプログラム。 - 請求項6に記載のプログラムを記憶した、コンピュータ読み取り可能な情報記憶媒体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011113370A JP5927776B2 (ja) | 2011-05-20 | 2011-05-20 | 携帯機器 |
| EP12168219.9A EP2525274B1 (en) | 2011-05-20 | 2012-05-16 | Mobile device including a magnetic sensor and method for calibrating the magnetic sensor |
| US13/473,915 US9164600B2 (en) | 2011-05-20 | 2012-05-17 | Mobile device |
| CN201210158375.1A CN102798393B (zh) | 2011-05-20 | 2012-05-21 | 移动设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011113370A JP5927776B2 (ja) | 2011-05-20 | 2011-05-20 | 携帯機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012242267A true JP2012242267A (ja) | 2012-12-10 |
| JP2012242267A5 JP2012242267A5 (ja) | 2013-05-16 |
| JP5927776B2 JP5927776B2 (ja) | 2016-06-01 |
Family
ID=46229183
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011113370A Active JP5927776B2 (ja) | 2011-05-20 | 2011-05-20 | 携帯機器 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9164600B2 (ja) |
| EP (1) | EP2525274B1 (ja) |
| JP (1) | JP5927776B2 (ja) |
| CN (1) | CN102798393B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014025791A (ja) * | 2012-07-26 | 2014-02-06 | Olympus Corp | キャリブレーション装置およびプログラム |
| JP2016057183A (ja) * | 2014-09-10 | 2016-04-21 | 富士通株式会社 | 電子機器及びキャリブレーションプログラム |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9939497B2 (en) * | 2013-03-15 | 2018-04-10 | Intel Corporation | Dynamically calibrating magnetic sensors |
| KR102006029B1 (ko) * | 2013-07-24 | 2019-08-01 | 매그나칩 반도체 유한회사 | 방위각 계산장치 및 그 방법 |
| US9398456B2 (en) * | 2014-03-07 | 2016-07-19 | Apple Inc. | Electronic device with accessory-based transmit power control |
| US9983224B2 (en) | 2014-05-02 | 2018-05-29 | Qualcomm Incorporated | Motion direction determination and application |
| US20150316577A1 (en) * | 2014-05-02 | 2015-11-05 | Qualcomm Incorporated | Motion direction determination and application |
| US10281484B2 (en) | 2014-05-02 | 2019-05-07 | Qualcomm Incorporated | Motion direction determination and application |
| CN105700041B (zh) * | 2016-01-20 | 2017-11-24 | 广东欧珀移动通信有限公司 | 一种磁传感器校准控制方法及用户终端 |
| CN107238808A (zh) * | 2016-03-29 | 2017-10-10 | 深圳市蓝魔数码科技有限公司 | 一种地磁校准定位装置 |
| US10058016B2 (en) * | 2016-09-22 | 2018-08-21 | Apple Inc. | Compensation of magnetic interference |
| CN111750895B (zh) * | 2019-07-31 | 2023-02-28 | 广东小天才科技有限公司 | 一种基于可穿戴设备的运动方向检测方法及可穿戴设备 |
| CN111174807B (zh) * | 2019-10-11 | 2022-05-27 | 广东小天才科技有限公司 | 一种自动校准地磁传感器的方法及智能手表 |
| DE102022208698A1 (de) * | 2022-08-23 | 2024-02-29 | Robert Bosch Gesellschaft mit beschränkter Haftung | Auswertevorrichtung und Verfahren zum Betreiben einer mit einem Magnetsensor und mindestens einem Inertialsensor ausgestatteten Sensorik |
| CN118090034A (zh) * | 2024-01-29 | 2024-05-28 | 上汽通用五菱汽车股份有限公司 | 一种传感器数据处理方法、装置、电子设备以及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05164560A (ja) * | 1991-12-17 | 1993-06-29 | Hitachi Cable Ltd | 方位センサ |
| JP2005265414A (ja) * | 2004-03-16 | 2005-09-29 | Citizen Watch Co Ltd | 電子方位計及び記録媒体 |
| WO2006035505A1 (ja) * | 2004-09-29 | 2006-04-06 | C & N Inc | 磁気センサの制御方法、制御装置、および携帯端末装置 |
| JP2009162510A (ja) * | 2007-12-28 | 2009-07-23 | Yamaha Corp | 磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム |
| JP2009186422A (ja) * | 2008-02-08 | 2009-08-20 | Asahi Kasei Electronics Co Ltd | 方位角計測装置及び方位角計測方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0485132B1 (en) * | 1990-11-06 | 1996-03-06 | Fujitsu Ten Limited | Direction sensor having an earth magnetism sensor and a rate gyro sensor and navigation system having this direction sensor |
| US6842991B2 (en) * | 2002-07-31 | 2005-01-18 | Robert W. Levi | Gyro aided magnetic compass |
| US7057173B2 (en) * | 2004-01-05 | 2006-06-06 | Laser Technology, Inc. | Magnetoresistive (MR) sensor temperature compensation and magnetic cross-term reduction techniques utilizing selective set and reset gain measurements |
| EP1605232A3 (en) * | 2004-06-11 | 2010-12-29 | Yamaha Corporation | Method and apparatus for measuring magnetic offset of geomagnetic sensor and portable electronic apparatus |
| WO2006011238A1 (ja) * | 2004-07-29 | 2006-02-02 | Yamaha Corporation | 方位データ演算方法、方位センサユニットおよび携帯電子機器 |
| US7421340B2 (en) * | 2005-02-28 | 2008-09-02 | Vectronix Ag | Method, apparatus and computer program for azimuth determination e.g. for autonomous navigation applications |
| JP2009534690A (ja) * | 2006-07-10 | 2009-09-24 | メムシック,インコーポレイテッド | 磁場センサーを用いて偏揺れを感知するためのシステム、および、前記システムを用いた携帯用の電子装置 |
| CN101652631A (zh) * | 2007-04-04 | 2010-02-17 | Nxp股份有限公司 | 方位感测系统的自动校准 |
| JP5012252B2 (ja) * | 2007-06-25 | 2012-08-29 | ヤマハ株式会社 | 磁気データ処理装置、方法およびプログラム |
| JP5178226B2 (ja) | 2008-02-08 | 2013-04-10 | オリンパス株式会社 | 画像処理装置および画像処理プログラム |
| KR20120008494A (ko) * | 2009-05-14 | 2012-01-30 | 닛본 덴끼 가부시끼가이샤 | 휴대 기기의 지자기 센서의 보정 방법, 휴대 기기 및 프로그램 |
| US8437970B2 (en) * | 2009-06-05 | 2013-05-07 | Apple Inc. | Restoring and storing magnetometer calibration data |
| CN101806595B (zh) | 2010-04-19 | 2012-01-04 | 美新半导体(无锡)有限公司 | 一种两维电子指南针校准方法 |
-
2011
- 2011-05-20 JP JP2011113370A patent/JP5927776B2/ja active Active
-
2012
- 2012-05-16 EP EP12168219.9A patent/EP2525274B1/en active Active
- 2012-05-17 US US13/473,915 patent/US9164600B2/en active Active
- 2012-05-21 CN CN201210158375.1A patent/CN102798393B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05164560A (ja) * | 1991-12-17 | 1993-06-29 | Hitachi Cable Ltd | 方位センサ |
| JP2005265414A (ja) * | 2004-03-16 | 2005-09-29 | Citizen Watch Co Ltd | 電子方位計及び記録媒体 |
| WO2006035505A1 (ja) * | 2004-09-29 | 2006-04-06 | C & N Inc | 磁気センサの制御方法、制御装置、および携帯端末装置 |
| JP2009162510A (ja) * | 2007-12-28 | 2009-07-23 | Yamaha Corp | 磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム |
| JP2009186422A (ja) * | 2008-02-08 | 2009-08-20 | Asahi Kasei Electronics Co Ltd | 方位角計測装置及び方位角計測方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014025791A (ja) * | 2012-07-26 | 2014-02-06 | Olympus Corp | キャリブレーション装置およびプログラム |
| JP2016057183A (ja) * | 2014-09-10 | 2016-04-21 | 富士通株式会社 | 電子機器及びキャリブレーションプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120296596A1 (en) | 2012-11-22 |
| JP5927776B2 (ja) | 2016-06-01 |
| EP2525274A2 (en) | 2012-11-21 |
| EP2525274A3 (en) | 2015-11-11 |
| EP2525274B1 (en) | 2019-09-18 |
| US9164600B2 (en) | 2015-10-20 |
| CN102798393B (zh) | 2016-05-11 |
| CN102798393A (zh) | 2012-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5927776B2 (ja) | 携帯機器 | |
| JP2012242267A5 (ja) | ||
| JP5017539B1 (ja) | 地磁気を測定し、利用する応用機器 | |
| CN110319851B (zh) | 传感器的校正方法、装置、设备及存储介质 | |
| CN103941309B (zh) | 地磁传感器校准设备及其方法 | |
| JP5469670B2 (ja) | 地磁気検出装置 | |
| CN103575293B (zh) | 一种磁力计方向角校正方法及磁力计 | |
| KR101503046B1 (ko) | 다축 감지 장치 및 이의 교정 방법 | |
| JP6191145B2 (ja) | オフセット推定装置及びプログラム | |
| US20150025838A1 (en) | Position estimation device, position estimation method, and integrated circuit | |
| KR20120107439A (ko) | 자체 보정 멀티-자기력계 플랫폼을 위한 시스템 및 방법 | |
| EP2482034A1 (en) | Geomagnetism sensing device | |
| US20150260543A1 (en) | Background calibration | |
| JP5809416B2 (ja) | 携帯機器と自律航法演算法 | |
| JP5678357B2 (ja) | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 | |
| CN109769206A (zh) | 一种室内定位融合方法、装置、存储介质及终端设备 | |
| JP5641236B2 (ja) | 地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム | |
| JP5772265B2 (ja) | 地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム | |
| JP6579478B2 (ja) | 電子機器及びセンサ較正方法、センサ較正プログラム | |
| JP2012189323A (ja) | 磁気データ処理装置、磁気データ処理方法及び磁気データ処理プログラム。 | |
| JP6477214B2 (ja) | 傾斜度測定方法及び装置並びに電子機器及びプログラム | |
| JP6014711B2 (ja) | 携帯機器と自律航法演算法 | |
| TWI680382B (zh) | 電子裝置及其姿態校正方法 | |
| JP6146962B2 (ja) | 磁気データ処理装置 | |
| CN118444219A (zh) | 电子设备和校正磁力计测量值的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140121 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140324 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140812 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141112 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20141120 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20150130 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151028 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5927776 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |