JP2012244726A - 回転電機の電機子および回転電機 - Google Patents
回転電機の電機子および回転電機 Download PDFInfo
- Publication number
- JP2012244726A JP2012244726A JP2011111372A JP2011111372A JP2012244726A JP 2012244726 A JP2012244726 A JP 2012244726A JP 2011111372 A JP2011111372 A JP 2011111372A JP 2011111372 A JP2011111372 A JP 2011111372A JP 2012244726 A JP2012244726 A JP 2012244726A
- Authority
- JP
- Japan
- Prior art keywords
- winding
- armature
- stator
- slot
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Brushless Motors (AREA)
- Windings For Motors And Generators (AREA)
Abstract
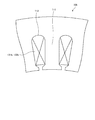
【解決手段】モータ1は、周方向に沿って複数のスロット112が形成された固定子コア11と、固定子コア11のスロット112へ設けられ、高速駆動状態および低速駆動状態の両状態において用いられる第1巻線121と、固定子コア11のスロット112へ設けられ、低速駆動状態において用いられる第2巻線122とを備え、第1巻線121の巻数が第2巻線122の巻数よりも多い。
【選択図】図1
Description
2 速度検出部
3 電源部
4a,4b 切替器
5 制御部
10,10a,10b 固定子
11 固定子コア
12 固定子巻線
20 回転子
21 回転子コア
22 永久磁石
30 シャフト
111 ティース
112 スロット
121,121a,121b 第1巻線
122,122a,122b 第2巻線
Claims (5)
- 周方向に沿って複数のスロットが形成された電機子コアと、
前記電機子コアのスロットへ設けられ、第1速度状態および該第1速度状態よりも低速な第2速度状態の両状態において用いられる第1の電機子巻線と、
前記電機子コアのスロットへ設けられ、前記第2速度状態において用いられる第2の電機子巻線と
を備え、
前記第1の電機子巻線の巻数が前記第2の電機子巻線の巻数よりも多いことを特徴とする回転電機の電機子。 - 前記第1の電機子巻線は、前記スロットの領域のうち、前記第2の電機子巻線よりも界磁から遠い側の領域へ設けられることを特徴とする請求項1に記載の回転電機の電機子。
- 前記第1の電機子巻線は、前記スロットの領域のうち、前記第2の電機子巻線よりも界磁に近い側の領域へ設けられることを特徴とする請求項1に記載の回転電機の電機子。
- 前記第1の電機子巻線と前記第2の電機子巻線とが、前記スロットの同一の領域へ設けられることを特徴とする請求項1に記載の回転電機の電機子。
- 電機子および界磁を備える回転電機であって、
前記電機子は、
周方向に沿って複数のスロットが形成された電機子コアと、
前記電機子コアのスロットへ設けられ、第1速度状態および該第1速度状態よりも低速な第2速度状態の両状態において用いられる第1の電機子巻線と、
前記電機子コアのスロットへ設けられ、前記第2速度状態において用いられる第2の電機子巻線と
を備え、
前記第1の電機子巻線の巻数が前記第2の電機子巻線の巻数よりも多いことを特徴とする回転電機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111372A JP2012244726A (ja) | 2011-05-18 | 2011-05-18 | 回転電機の電機子および回転電機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111372A JP2012244726A (ja) | 2011-05-18 | 2011-05-18 | 回転電機の電機子および回転電機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012244726A true JP2012244726A (ja) | 2012-12-10 |
Family
ID=47465856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011111372A Pending JP2012244726A (ja) | 2011-05-18 | 2011-05-18 | 回転電機の電機子および回転電機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012244726A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020174497A (ja) * | 2019-04-12 | 2020-10-22 | 株式会社kaisei | 三相交流発電機 |
| WO2021019703A1 (ja) * | 2019-07-30 | 2021-02-04 | 株式会社kaisei | 三相交流発電機 |
| WO2021024645A1 (ja) * | 2019-08-06 | 2021-02-11 | 株式会社日立産機システム | 回転電機 |
| CN113472113A (zh) * | 2020-03-31 | 2021-10-01 | 日本电产株式会社 | 马达 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0522990A (ja) * | 1991-07-05 | 1993-01-29 | Fanuc Ltd | 誘導電動機の巻線切換駆動方式 |
| JPH06113517A (ja) * | 1992-09-30 | 1994-04-22 | Daikin Ind Ltd | ブラシレス直流モータ |
| JPH10126993A (ja) * | 1996-10-21 | 1998-05-15 | Yaskawa Electric Corp | 工作機用モータの巻線切替装置 |
| JP2005307867A (ja) * | 2004-04-22 | 2005-11-04 | Matsushita Electric Ind Co Ltd | 圧縮機、圧縮機駆動制御装置および圧縮機の駆動制御方法 |
-
2011
- 2011-05-18 JP JP2011111372A patent/JP2012244726A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0522990A (ja) * | 1991-07-05 | 1993-01-29 | Fanuc Ltd | 誘導電動機の巻線切換駆動方式 |
| JPH06113517A (ja) * | 1992-09-30 | 1994-04-22 | Daikin Ind Ltd | ブラシレス直流モータ |
| JPH10126993A (ja) * | 1996-10-21 | 1998-05-15 | Yaskawa Electric Corp | 工作機用モータの巻線切替装置 |
| JP2005307867A (ja) * | 2004-04-22 | 2005-11-04 | Matsushita Electric Ind Co Ltd | 圧縮機、圧縮機駆動制御装置および圧縮機の駆動制御方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020174497A (ja) * | 2019-04-12 | 2020-10-22 | 株式会社kaisei | 三相交流発電機 |
| JP7288337B2 (ja) | 2019-04-12 | 2023-06-07 | 株式会社kaisei | 三相交流発電機 |
| WO2021019703A1 (ja) * | 2019-07-30 | 2021-02-04 | 株式会社kaisei | 三相交流発電機 |
| WO2021024645A1 (ja) * | 2019-08-06 | 2021-02-11 | 株式会社日立産機システム | 回転電機 |
| TWI772833B (zh) * | 2019-08-06 | 2022-08-01 | 日商日立產機系統股份有限公司 | 旋轉電機 |
| CN113472113A (zh) * | 2020-03-31 | 2021-10-01 | 日本电产株式会社 | 马达 |
| CN113472113B (zh) * | 2020-03-31 | 2024-04-12 | 日本电产株式会社 | 马达 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8841813B2 (en) | Brushless synchronous motor having a periodically varying air gap | |
| JP5542849B2 (ja) | スイッチドリラクタンスモータ | |
| JP2010531130A (ja) | 12個のステータ歯と10個のロータ極とを有する同期モータ | |
| JP6140035B2 (ja) | 三相電磁モータ | |
| JP6227171B2 (ja) | 極数切替型回転電機および極数切替型回転電機の駆動方法 | |
| JP2011120465A (ja) | 2相bldcモータ | |
| JP4883327B2 (ja) | ギャップワインディング形モータ | |
| JP2013066251A (ja) | 回転電機 | |
| CN103023264A (zh) | 机械整流开关磁阻电机 | |
| CN102957235A (zh) | 开关磁阻电机 | |
| CN202475197U (zh) | 电动汽车用双转子开关磁阻电机 | |
| US20110248582A1 (en) | Switched reluctance machine | |
| JP5301905B2 (ja) | 複数相回転電機駆動装置、複数相発電機用コンバータ、複数相回転電機、及び回転電機駆動システム | |
| JP2014176284A (ja) | ダブルステータ型スイッチトリラクタンス回転機 | |
| JP2012244726A (ja) | 回転電機の電機子および回転電機 | |
| JP4927226B1 (ja) | 高効率発電機 | |
| JP2010154648A (ja) | モータ | |
| JP2003348809A (ja) | 磁石内包式インナーロータ型モータ | |
| WO2012168977A1 (ja) | 回転電機 | |
| JP6879884B2 (ja) | 駆動システム | |
| JP6498775B2 (ja) | 固定子および回転電機 | |
| JP2015163028A (ja) | 極数変換回転電機 | |
| JP2006238679A (ja) | 永久磁石型単相モータ | |
| JP6302698B2 (ja) | 回転電機ユニット | |
| JP2010284028A (ja) | スイッチング素子一体型回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140225 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140421 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141111 |