JP2012245344A - ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 - Google Patents
ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 Download PDFInfo
- Publication number
- JP2012245344A JP2012245344A JP2011168849A JP2011168849A JP2012245344A JP 2012245344 A JP2012245344 A JP 2012245344A JP 2011168849 A JP2011168849 A JP 2011168849A JP 2011168849 A JP2011168849 A JP 2011168849A JP 2012245344 A JP2012245344 A JP 2012245344A
- Authority
- JP
- Japan
- Prior art keywords
- dust
- robot cleaner
- cleaner
- container
- station
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Landscapes
- Filters For Electric Vacuum Cleaners (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
【解決手段】自律的に動いて塵埃を収集し、かつ、塵埃排出ステーションへと塵埃を排出することができるロボット掃除機であって、塵埃を格納するための塵埃容器と、塵埃容器へ塵埃を収集するための塵埃入口と、ロボット掃除機の底面に設けられ、塵埃容器に収集された塵埃を排出するための塵埃容器の開閉機構とを有するロボット掃除機を提供する。
【選択図】図1
Description
(2)塵埃容器からの塵埃の排出を簡単にする必要があること
(3)吸引力が低いこと
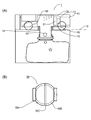
図1は、本発明の一実施形態に従うロボット掃除機システム1の側面図を示している。
ロボット掃除機ステーション10は、塵埃収集システム12と、及び塵埃収集システム12の上にバッテリー充電機30とを備える。バッテリー充電機30は、ロボット掃除機50内の二次電池52を充電するために接点端子32を有する。代わりに、バッテリー充電機30は、電磁場を誘導するコイルを使用する非接触帯電機器であってもよい。
ロボット掃除機50は、人による操作を伴わずに、床5を単独で清掃する自己推進可能な自律的な掃除機である。同様のロボット掃除機の例には、iRobot社によってリリースされているRoomba(登録商標)シリーズがある。ロボット掃除機50は、ハウジング、3つのタイヤ62、塵埃入口54、掃除機内塵埃容器56、塵埃容器カバー66、塵埃壁受け64、塵埃フィルタ57、モータファンユニット61、及び気体出口を備える。
図2Aは、塵埃排出の際の図1のロボット掃除機システム1の側面図を示している。
図5は、塵埃入口が塵埃出口としても使用される本発明の一実施形態に従うロボット掃除機システムの側面図を示している。
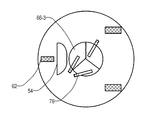
図7は、ロボット掃除機50の底面を示している。
図8は、扇形のカバープレートを使用する本発明のロボット掃除機を示している。
図9Aは、矩形のカバープレート及び2つのレールガイドを使用する本発明の一実施形態に従うロボット掃除機を示している。図9Bは、図9Aのロボット掃除機の側面図を示している。図9Cは、別の実施形態に従うロボット掃除機の側面図を示している。
図6Aは、塵埃を排出する際の多段サイクロン掃除機51を示している。多段サイクロン掃除機51は、床を自律的に清掃するロボット掃除機である。
図6Bは、ファン61A及びモータ61Bが第1及び第2サイクロン71、72の上方に位置する別の実施形態に従う多段サイクロン掃除機を示している。これに応じて、フィルタ58は第2サイクロン72とファン61Aの間に位置する。第1サイクロン71、ファン61A及びモータ61Bの軸は、略同一である。この掃除機は有利である。なぜなら、比較的非常に長く細い図6Aの導路75における気流の抵抗を減らすことができ、ファン61Aの大きさを大きくすることができ、そして、比較的広い面積から上方へ排気することができるからである。
図6Cは、ファン61Aは第1及び第2サイクロン71、72の上方に位置するが、モータ61Bは第1サイクロン71の中央部で第2サイクロン72よりも下方に位置する、別の実施形態に従う多段サイクロン掃除機を示している。このアプローチは有利である。なぜなら、ファン61Aの上方にモータ61Bのためのスペースの必要がないので、図6Bの掃除機と比較して全高を低くでき、高さが低い空間に掃除機が入り込むことができるためである。しかしながら、モータ61Bとファン61Aの間に長い軸が必要となり、掃除機本体にモータ61Bを固定し、掃除機本体に対してモータ61Bの軸を保持し、そして、グリースが塗られていることがある軸を塵埃から保護する必要がある。
図12Aは、本発明の一実施形態に従う手動式塵埃排出システムを示している。
塵埃収集システム12の上面が床5より高い高さにある場合、自動排出システムを達成するためにはロボット掃除機50を自動的に上昇させる必要がある。図13は、リフト機構を有する塵埃収集システムを示している。
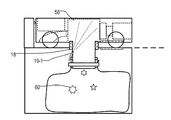
図14は、掃除機内塵埃容器56内の塵埃を除去するための吹きつけ機19−1を有する本発明の塵埃収集システムを示している。このアプローチは、ロボット掃除機50の塵埃収集システム12と塵埃吹きつけ機74とが組み合わさったものである。このアプローチは、ロボット掃除機50における複雑な機構を避けられるという点で有利である。さらに、このアプローチは、吹きつける方向について、ロボット掃除機50における塵埃容器56の下方から吹きつけられるという点で有利である。なぜなら、特にロボット掃除機50が図6Aで示される多段サイクロン掃除機51である場合に、塵埃容器56の形状によって下方から吹きつけた方が良好に塵埃を吹きつけられるからである。
本発明の上記実施形態では、塵埃収集システム12、ロボット掃除機50及びそれらの構成部品のいくつかの実施形態を示した。組合せのすべてを本明細書に記載していないが、これらの要素の組合せはすべて本発明の実施形態を構成し、本明細書に組み込む。
Claims (15)
- 自律的に動いて塵埃を収集し、かつ、塵埃排出ステーションへと塵埃を排出することができるロボット掃除機であって、
塵埃を格納するための塵埃容器と、
塵埃容器へ塵埃を収集するための塵埃入口と、
ロボット掃除機の底面に設けられ、塵埃容器に収集された塵埃を排出するための塵埃容器の開閉機構と
を有するロボット掃除機。 - 塵埃排出ステーションにおける塵埃排出位置へ自律的に移動する
請求項1記載のロボット掃除機。 - 塵埃の排出を促進させるための塵埃排出促進機構を有する
請求項1記載のロボット掃除機。 - 塵埃排出促進機構は、塵埃容器における塵埃に対して吹きつけ、かつ、ロボット掃除機ステーションへ塵埃を排出する吹きつけ機である
請求項1記載のロボット掃除機。 - 塵埃排出促進機構は、塵埃容器における塵埃を振動させ、振動された塵埃を塵埃排出ステーションへと排出するための振動機構である
請求項1記載のロボット掃除機。 - 塵埃排出促進機構は、ロボット掃除機の塵埃容器から塵埃を除去するための攪拌機である
請求項1記載のロボット掃除機。 - 開閉機構は、塵埃容器の開口を覆うためのカバープレートと、カバープレートを押し、カバープレートを閉じるための閉じ棒と
を有する請求項1記載のロボット掃除機。 - 開閉機構は、塵埃容器の開口を覆うためのカバープレートと、カバープレートの開閉の際にカバープレートをガイドするレールガイドと
を有する請求項1記載のロボット掃除機。 - 掃除機から塵埃を収集することができる塵埃排出ステーションであって、
掃除機に対して台を提供し、掃除機を塵埃排出位置に配置するための掃除機用の台と、
掃除機台にて設けられ、塵埃排出位置で掃除機から塵埃を受けるように適合している塵埃受けと、
塵埃受けの下に配置され、かつ、ステーション内塵埃容器を保持するための容器ホルダーとを有し、
塵埃排出ステーションは、少なくとも重力に起因して、掃除機によって収集された塵埃を掃除機から受け、かつ、塵埃受け及びステーション内塵埃容器によって塵埃の経路を提供することによってステーション内塵埃容器の中へ塵埃を収容する
塵埃排出ステーション。 - ステーション内塵埃容器内の塵埃が塵埃排出ステーションの外に出ることを防ぐ開閉機構を有する請求項9記載の塵埃排出ステーション。
- ユーザの指示なしに塵埃の収容が自動的に行われる
請求項9記載の塵埃排出ステーション。 - 塵埃排出ステーションが、塵埃の排出を促進させるための塵埃排出促進機構を有する
請求項9記載の塵埃排出ステーション。 - 開閉機構は、
塵埃排出ステーションの塵埃の経路を覆うためのカバープレートと、
カバープレートを押し、かつ、カバープレートを閉じるための閉じ棒と
を備える請求項10記載の塵埃排出ステーション。 - 開閉機構は、
塵埃排出ステーションの塵埃の経路を覆うためのカバープレートと、
カバープレートに係合し、カバープレートを開閉する際にカバープレートをガイドするレールガイドと
請求項10記載の塵埃排出ステーション。 - 床の気体が入る入口、及び第1サイクロンの中央に気体の出口を有する、塵埃を分離するための第1サイクロンと、
第1サイクロンより小さな塵埃を分離するための複数の第2サイクロンであって、第2サイクロンの各々は第1サイクロンより小さく、第1サイクロンの出口からの気体が第2サイクロンの入口へ供給される、第2サイクロンと、
吹きつけ機、振動機構及び攪拌機からなる群から選択される塵埃容器の内部の塵埃の除去を促進させるための塵埃排出促進機構と
を備えた多段サイクロン掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011168849A JP6010722B2 (ja) | 2010-08-01 | 2011-08-01 | ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US61/367723 | 2010-08-01 | ||
| JP2011168849A JP6010722B2 (ja) | 2010-08-01 | 2011-08-01 | ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012245344A true JP2012245344A (ja) | 2012-12-13 |
| JP2012245344A5 JP2012245344A5 (ja) | 2015-07-02 |
| JP6010722B2 JP6010722B2 (ja) | 2016-10-19 |
Family
ID=47466360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011168849A Expired - Fee Related JP6010722B2 (ja) | 2010-08-01 | 2011-08-01 | ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6010722B2 (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014132974A (ja) * | 2013-01-09 | 2014-07-24 | Sharp Corp | 自走式掃除機および自走式掃除装置 |
| WO2016028096A1 (ko) * | 2014-08-21 | 2016-02-25 | 삼성전자주식회사 | 로봇 청소기 |
| WO2016027745A1 (ja) * | 2014-08-20 | 2016-02-25 | 株式会社東芝 | 電気掃除機 |
| JP2016193244A (ja) * | 2016-07-19 | 2016-11-17 | シャープ株式会社 | 自走式掃除機および自走式掃除装置 |
| KR20170010402A (ko) | 2014-07-04 | 2017-01-31 | 도시바 라이프스타일 가부시키가이샤 | 전기청소기 |
| KR20170010818A (ko) | 2014-07-04 | 2017-02-01 | 도시바 라이프스타일 가부시키가이샤 | 전기청소기 |
| DE102019102382A1 (de) | 2019-01-30 | 2020-07-30 | Vorwerk & Co. Interholding Gmbh | Sauggutsammelstation und System aus einer Sauggutsammelstation und einem Saugreinigungsgerät |
| CN113116214A (zh) * | 2019-12-31 | 2021-07-16 | 江苏美的清洁电器股份有限公司 | 底座组件、清洁设备、倒灰方法及存储介质 |
| JP2021151483A (ja) * | 2014-12-10 | 2021-09-30 | アイロボット・コーポレーション | 清掃ロボット用デブリ排出 |
| CN115381358A (zh) * | 2022-08-25 | 2022-11-25 | 追觅创新科技(苏州)有限公司 | 除湿装置、清洁设备及除湿方法 |
| JP2023516403A (ja) * | 2020-03-03 | 2023-04-19 | エルジー エレクトロニクス インコーポレイティド | 掃除機ステーション、掃除機システムおよび掃除機ステーションを制御する方法 |
| JP2023178743A (ja) * | 2022-06-06 | 2023-12-18 | 三菱電機株式会社 | 電気掃除機 |
| WO2024176488A1 (ja) * | 2023-02-22 | 2024-08-29 | 日立グローバルライフソリューションズ株式会社 | 排出ステーション |
| JP2024545524A (ja) * | 2021-12-15 | 2024-12-09 | 北京石頭世紀科技股▲ふん▼有限公司 | ダスト収集パイルおよび自動清掃システム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108784520A (zh) * | 2018-06-27 | 2018-11-13 | 杨扬 | 带内嵌尘盒的吸尘机器人以及建立栅格地图的方法 |
| KR102761429B1 (ko) * | 2019-08-05 | 2025-02-05 | 삼성전자주식회사 | 로봇 청소기의 스테이션 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61280818A (ja) * | 1985-05-24 | 1986-12-11 | 三洋電機株式会社 | 自動掃除装置 |
| JPH10502274A (ja) * | 1994-07-04 | 1998-03-03 | ソーラー アンド ロボティクス エス・アー | 床清掃用自動機械及び装置 |
| JP2001212052A (ja) * | 2000-12-27 | 2001-08-07 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
| JP2004283327A (ja) * | 2003-03-20 | 2004-10-14 | Hitachi Home & Life Solutions Inc | 電気掃除機 |
| US20050150519A1 (en) * | 2002-07-08 | 2005-07-14 | Alfred Kaercher Gmbh & Co. Kg | Method for operating a floor cleaning system, and floor cleaning system for use of the method |
| JP2006087507A (ja) * | 2004-09-21 | 2006-04-06 | Sanyo Electric Co Ltd | 自走式掃除機 |
| JP2007125294A (ja) * | 2005-11-07 | 2007-05-24 | Sharp Corp | 集塵器およびそれを備えた電気掃除機 |
| US20080276407A1 (en) * | 2007-05-09 | 2008-11-13 | Irobot Corporation | Compact Autonomous Coverage Robot |
| JP2009011616A (ja) * | 2007-07-06 | 2009-01-22 | Panasonic Corp | 電気掃除機 |
| US20100107355A1 (en) * | 2006-05-19 | 2010-05-06 | Irobot Corporation | Removing Debris From Cleaning Robots |
-
2011
- 2011-08-01 JP JP2011168849A patent/JP6010722B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61280818A (ja) * | 1985-05-24 | 1986-12-11 | 三洋電機株式会社 | 自動掃除装置 |
| JPH10502274A (ja) * | 1994-07-04 | 1998-03-03 | ソーラー アンド ロボティクス エス・アー | 床清掃用自動機械及び装置 |
| JP2001212052A (ja) * | 2000-12-27 | 2001-08-07 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
| US20050150519A1 (en) * | 2002-07-08 | 2005-07-14 | Alfred Kaercher Gmbh & Co. Kg | Method for operating a floor cleaning system, and floor cleaning system for use of the method |
| JP2004283327A (ja) * | 2003-03-20 | 2004-10-14 | Hitachi Home & Life Solutions Inc | 電気掃除機 |
| JP2006087507A (ja) * | 2004-09-21 | 2006-04-06 | Sanyo Electric Co Ltd | 自走式掃除機 |
| JP2007125294A (ja) * | 2005-11-07 | 2007-05-24 | Sharp Corp | 集塵器およびそれを備えた電気掃除機 |
| US20100107355A1 (en) * | 2006-05-19 | 2010-05-06 | Irobot Corporation | Removing Debris From Cleaning Robots |
| US20080276407A1 (en) * | 2007-05-09 | 2008-11-13 | Irobot Corporation | Compact Autonomous Coverage Robot |
| JP2009011616A (ja) * | 2007-07-06 | 2009-01-22 | Panasonic Corp | 電気掃除機 |
Cited By (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014132974A (ja) * | 2013-01-09 | 2014-07-24 | Sharp Corp | 自走式掃除機および自走式掃除装置 |
| US9907447B2 (en) | 2014-07-04 | 2018-03-06 | Toshiba Lifestyle Products & Services Corporation | Electric vacuum cleaner |
| US10022029B2 (en) | 2014-07-04 | 2018-07-17 | Toshiba Lifestyle Products & Services Corporation | Electric vacuum cleaner |
| KR20170010818A (ko) | 2014-07-04 | 2017-02-01 | 도시바 라이프스타일 가부시키가이샤 | 전기청소기 |
| KR20170010402A (ko) | 2014-07-04 | 2017-01-31 | 도시바 라이프스타일 가부시키가이샤 | 전기청소기 |
| CN106687019B (zh) * | 2014-08-20 | 2019-05-10 | 东芝生活电器株式会社 | 电动吸尘器 |
| JP2016042921A (ja) * | 2014-08-20 | 2016-04-04 | 株式会社東芝 | 電気掃除機 |
| CN106687019A (zh) * | 2014-08-20 | 2017-05-17 | 东芝生活电器株式会社 | 电动吸尘器 |
| US10143348B2 (en) | 2014-08-20 | 2018-12-04 | Toshiba Lifestyle Products & Services Corporation | Electric vacuum cleaning apparatus |
| WO2016027745A1 (ja) * | 2014-08-20 | 2016-02-25 | 株式会社東芝 | 電気掃除機 |
| CN106793904B (zh) * | 2014-08-21 | 2019-10-01 | 三星电子株式会社 | 机器人清洁器 |
| CN106793904A (zh) * | 2014-08-21 | 2017-05-31 | 三星电子株式会社 | 机器人清洁器 |
| AU2015304178B2 (en) * | 2014-08-21 | 2018-03-01 | Samsung Electronics Co., Ltd. | Robot cleaner |
| US10130227B2 (en) | 2014-08-21 | 2018-11-20 | Samsung Electronics Co., Ltd. | Robot cleaner |
| WO2016028096A1 (ko) * | 2014-08-21 | 2016-02-25 | 삼성전자주식회사 | 로봇 청소기 |
| US11129509B2 (en) | 2014-08-21 | 2021-09-28 | Samsung Electronics Co., Ltd. | Robot cleaner |
| JP7342061B2 (ja) | 2014-12-10 | 2023-09-11 | アイロボット・コーポレーション | 清掃ロボット用デブリ排出 |
| US12004704B2 (en) | 2014-12-10 | 2024-06-11 | Irobot Corporation | Debris evacuation for cleaning robots |
| JP2021151483A (ja) * | 2014-12-10 | 2021-09-30 | アイロボット・コーポレーション | 清掃ロボット用デブリ排出 |
| JP2016193244A (ja) * | 2016-07-19 | 2016-11-17 | シャープ株式会社 | 自走式掃除機および自走式掃除装置 |
| DE102019102382A1 (de) | 2019-01-30 | 2020-07-30 | Vorwerk & Co. Interholding Gmbh | Sauggutsammelstation und System aus einer Sauggutsammelstation und einem Saugreinigungsgerät |
| CN113116214B (zh) * | 2019-12-31 | 2024-04-02 | 江苏美的清洁电器股份有限公司 | 底座组件、清洁设备、倒灰方法及存储介质 |
| CN113116214A (zh) * | 2019-12-31 | 2021-07-16 | 江苏美的清洁电器股份有限公司 | 底座组件、清洁设备、倒灰方法及存储介质 |
| JP2023516403A (ja) * | 2020-03-03 | 2023-04-19 | エルジー エレクトロニクス インコーポレイティド | 掃除機ステーション、掃除機システムおよび掃除機ステーションを制御する方法 |
| US12383108B2 (en) | 2020-03-03 | 2025-08-12 | Lg Electronics Inc. | Vacuum cleaner station, vacuum cleaner system, and method for controlling vacuum cleaner station |
| US12185903B2 (en) | 2020-03-03 | 2025-01-07 | Lg Electronics Inc. | Vacuum cleaner station, vacuum cleaner system, and method for controlling vacuum cleaner station |
| JP7498786B2 (ja) | 2020-03-03 | 2024-06-12 | エルジー エレクトロニクス インコーポレイティド | 掃除機ステーション、掃除機システムおよび掃除機ステーションを制御する方法 |
| US12178385B2 (en) | 2020-03-03 | 2024-12-31 | Lg Electronics Inc. | Vacuum cleaner station, vacuum cleaner system, and method for controlling vacuum cleaner station |
| US12127728B2 (en) | 2020-03-03 | 2024-10-29 | Lg Electronics Inc. | Vacuum cleaner station, vacuum cleaner system, and method for controlling vacuum cleaner station |
| US12156633B2 (en) | 2020-03-03 | 2024-12-03 | Lg Electronics Inc. | Vacuum cleaner station, vacuum cleaner system, and method for controlling vacuum cleaner station |
| JP2024545524A (ja) * | 2021-12-15 | 2024-12-09 | 北京石頭世紀科技股▲ふん▼有限公司 | ダスト収集パイルおよび自動清掃システム |
| JP7749848B2 (ja) | 2021-12-15 | 2025-10-06 | 北京石頭世紀科技股▲ふん▼有限公司 | ダスト収集パイルおよび自動清掃システム |
| JP2023178743A (ja) * | 2022-06-06 | 2023-12-18 | 三菱電機株式会社 | 電気掃除機 |
| CN115381358A (zh) * | 2022-08-25 | 2022-11-25 | 追觅创新科技(苏州)有限公司 | 除湿装置、清洁设备及除湿方法 |
| WO2024176488A1 (ja) * | 2023-02-22 | 2024-08-29 | 日立グローバルライフソリューションズ株式会社 | 排出ステーション |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6010722B2 (ja) | 2016-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6010722B2 (ja) | ロボット掃除機、塵埃排出ステーション及び多段サイクロン掃除機 | |
| US9192272B2 (en) | Robot cleaner and dust discharge station | |
| CA2880934C (en) | Surface cleaning apparatus | |
| JP2017055834A (ja) | 電気掃除装置 | |
| JP6707341B2 (ja) | 電気掃除装置 | |
| RU2433778C1 (ru) | Пылесборное устройство и электрический пылесос | |
| KR20190099581A (ko) | 현관 청소 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121001 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140808 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140801 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141128 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140801 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150509 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150818 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6010722 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |