JP2012246142A - 支持体、モジュール、人間/物品を移動させるための輸送システム、および人間/物品の輸送システムの改造方法 - Google Patents
支持体、モジュール、人間/物品を移動させるための輸送システム、および人間/物品の輸送システムの改造方法 Download PDFInfo
- Publication number
- JP2012246142A JP2012246142A JP2012118550A JP2012118550A JP2012246142A JP 2012246142 A JP2012246142 A JP 2012246142A JP 2012118550 A JP2012118550 A JP 2012118550A JP 2012118550 A JP2012118550 A JP 2012118550A JP 2012246142 A JP2012246142 A JP 2012246142A
- Authority
- JP
- Japan
- Prior art keywords
- module
- support
- exit
- inlet
- floor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 24
- 238000006073 displacement reaction Methods 0.000 title 1
- 238000012790 confirmation Methods 0.000 claims abstract description 4
- 238000009434 installation Methods 0.000 claims abstract description 4
- 230000013011 mating Effects 0.000 claims description 6
- 238000012795 verification Methods 0.000 claims description 5
- 241000282414 Homo sapiens Species 0.000 claims description 3
- 238000007634 remodeling Methods 0.000 description 3
- 238000009420 retrofitting Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 238000002715 modification method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B23/00—Component parts of escalators or moving walkways
- B66B23/14—Guiding means for carrying surfaces
- B66B23/147—End portions, i.e. means for changing the direction of the carrying surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B19/00—Mining-hoist operation
- B66B19/007—Mining-hoist operation method for modernisation of elevators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49718—Repairing
- Y10T29/49721—Repairing with disassembling
Landscapes
- Escalators And Moving Walkways (AREA)
Abstract
【課題】輸送システム(エスカレーター)の改造において据付調整作業を容易化する方法を提供する。
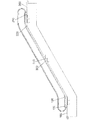
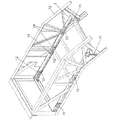
【解決手段】支持体1に配置される入口仕上げ床、出口仕上げ床、中央部における入口モジュール、出口モジュール、中央モジュールを用いて改造する方法であり、支持体1は輸送システムの担持構造10に対して支持体を固定するための固定具11、入口・出口モジュールを支持し、水平に配置させる水平のタイプレート12、横方向について位置を決める横方向のタイプレート13、縦方向について位置を決める縦方向のタイプレート14、輸送システムのシステムラインの許容範囲内に維持させながら、入口・出口モジュールを配置させるための位置決めおよび確認の部材を有する。
【選択図】図2
【解決手段】支持体1に配置される入口仕上げ床、出口仕上げ床、中央部における入口モジュール、出口モジュール、中央モジュールを用いて改造する方法であり、支持体1は輸送システムの担持構造10に対して支持体を固定するための固定具11、入口・出口モジュールを支持し、水平に配置させる水平のタイプレート12、横方向について位置を決める横方向のタイプレート13、縦方向について位置を決める縦方向のタイプレート14、輸送システムのシステムラインの許容範囲内に維持させながら、入口・出口モジュールを配置させるための位置決めおよび確認の部材を有する。
【選択図】図2
Description
本発明は、支持体、当該支持体に配置されるモジュール、本発明の当該モジュールを用いて改造されている人間/物品を移動させるための輸送システム、および人間/物品を移動させるための輸送システム(例えばエスカレーター)の改造方法に関する。
米国特許第6,685,002号は、モジュール式の構成要素を用いてエスカレーターを改造する方法を開示している。既存のエスカレーターの機械部品および電気的部品は、構造的なトラスの骨格、横材および外部部品(例えば建造物と接している外部パネル)のみを残して取り除かれる。単一のモジュールがエスカレーターの上部に配置され、他のモジュールがエスカレーターの底部に配置される。斜めに伸びている複数のモジュールは、エスカレーターの中央にある傾斜部分における各横材に配置される。これらのモジュールを利用することによって、エスカレーターの組立てが単純化される。さらに、古いシステムに新たな部分を単に組み込むことよりむしろ、最新の技術を用いた全体的に新規なエスカレーターシステムが取りつけられ得る。
独国特許第2121748号は、種々の構成要素(例えば、循環している移動式の一組の踏み段)を取りつける、内側に突出している支持部材をともなっている枠組み、上記踏み段と同期的に移動する手すり、駆動ユニットおよび駆動スプロケット、上記踏み段の両側に直立している欄干、ならびに上記踏み段をガイドするためのレールを有している老朽化したエスカレーターを改良するための改造方法を開示している。当該改造方法は、老朽化したエスカレーターの枠組みから構成要素を取り除くこと;上記枠組みから支持部材を取り除くこと;当該枠組みに他の枠組みを取りつけること;マンコンベアの、欄干、駆動ユニット、レールなど、および一組の踏み段を上記他の枠組みに取りつけること;ならびに上記他の枠組みに固定されている外部の棚板部材によって上記他の枠組みおよび上記枠組みの間における隙間を覆うことを包含している。上記他の枠組みは、新たなエスカレーターの種々の構成要素を支持するためにそれに対してすでに取りつけられている支持部材および基底部材を備えている。
本発明は、支持体、当該支持体に配置されるモジュール、および人間/物品を移動させるための改造された輸送システム(例えば、各請求項によって規定されているそれら)に関する。また、本発明は、本発明のモジュールを組み込んで、人間/物品を移動させるための輸送システムを改造する方法に関する。
改造されるシステムのかみ合い点を維持するために本発明にしたがって改造されるシステムにとっての支持体およびモジュールの位置合わせにしたがって、上記方法は、調節され得るか、または調整され得る。
調節された上記方法は、以下の(1)〜(7)を包含している。
(1)人間/物品を輸送するシステムまたはもとのエスカレーターのかみ合い点を見つけること、および実際の地点まで当該かみ合い点を移動させること;
(2)人間/物品の輸送システムまたはもとのエスカレーターの、構造体を除くすべての構成要素を取り外すこと;
(3)上記かみ合い点に関して正確に、上記構造体に対してモジュールの支持体を位置決めして、
(3.1)使用され得る入口の支持体、出口の支持体、治具および固定具もしくは梁受けを位置決めすること、
(3.2)一方で、入口の支持体および出口の支持体の水平面の完全な水平さを確保すること、
(3.3)出口の支持体に対する入口の支持体の位置決めを確認すること;
(4)支持体のタイプレートおよびモジュールのプラグを重ねて、支持体にモジュールを配置させること;
(5)下部のモジュールであり得る入口のモジュールおよび上部のモジュールであり得る出口のモジュールの間に、先端ラインの方向に整列化システムを設置すること;
(6)中央部または傾斜部(エスカレーターのように入口の水平面と出口の水平面との間に差がある場合)に沿って必要な中央のモジュールの位置決めをすること;
(7)上部、下部および中央のモジュールが適切な位置に配置されて、残りの要素を用いた輸送システムの取りつけを完了させること。
上記(4)において、支持体の位置決めが正しい場合、固定プラグとモジュールのかみ合い点との間における許容範囲を担保するモジュールの製造の精度の結果として、機械のかみ合い点はモジュールのかみ合い点と重なる。次に進む前に、モジュールの正しい配置を確認する必要がある。
上記(5)において、補助的な整列化システムは、細いロープまたはエミッタ(逆反射性の標的を整列化させるレーザシステム)であり得る。この段階において、この補助線は水平に対する所望の程度を形成していることが確認され得る。
上記(6)において、中央のモジュールは、中央のモジュールを補助線と一列に揃えるために構成されている整列化を測定する開口または標的を備えている。
上記(7)において、端部のモジュール(すなわち上部および下部のモジュール)において、大部分の機械装置が集中しているので、エスカレーターの部品の大部分は工場においてすでに組立て済である。循環を閉じるまでを現場において完了させられ得る中央の領域は、より簡単な実施の負荷をともなう。
(1)人間/物品を輸送するシステムまたはもとのエスカレーターのかみ合い点を見つけること、および実際の地点まで当該かみ合い点を移動させること;
(2)人間/物品の輸送システムまたはもとのエスカレーターの、構造体を除くすべての構成要素を取り外すこと;
(3)上記かみ合い点に関して正確に、上記構造体に対してモジュールの支持体を位置決めして、
(3.1)使用され得る入口の支持体、出口の支持体、治具および固定具もしくは梁受けを位置決めすること、
(3.2)一方で、入口の支持体および出口の支持体の水平面の完全な水平さを確保すること、
(3.3)出口の支持体に対する入口の支持体の位置決めを確認すること;
(4)支持体のタイプレートおよびモジュールのプラグを重ねて、支持体にモジュールを配置させること;
(5)下部のモジュールであり得る入口のモジュールおよび上部のモジュールであり得る出口のモジュールの間に、先端ラインの方向に整列化システムを設置すること;
(6)中央部または傾斜部(エスカレーターのように入口の水平面と出口の水平面との間に差がある場合)に沿って必要な中央のモジュールの位置決めをすること;
(7)上部、下部および中央のモジュールが適切な位置に配置されて、残りの要素を用いた輸送システムの取りつけを完了させること。
上記(4)において、支持体の位置決めが正しい場合、固定プラグとモジュールのかみ合い点との間における許容範囲を担保するモジュールの製造の精度の結果として、機械のかみ合い点はモジュールのかみ合い点と重なる。次に進む前に、モジュールの正しい配置を確認する必要がある。
上記(5)において、補助的な整列化システムは、細いロープまたはエミッタ(逆反射性の標的を整列化させるレーザシステム)であり得る。この段階において、この補助線は水平に対する所望の程度を形成していることが確認され得る。
上記(6)において、中央のモジュールは、中央のモジュールを補助線と一列に揃えるために構成されている整列化を測定する開口または標的を備えている。
上記(7)において、端部のモジュール(すなわち上部および下部のモジュール)において、大部分の機械装置が集中しているので、エスカレーターの部品の大部分は工場においてすでに組立て済である。循環を閉じるまでを現場において完了させられ得る中央の領域は、より簡単な実施の負荷をともなう。
調整可能な方法において、いくつかの段階:
(3’)上記かみ合い点の近傍に基部または支持体を位置決めすること
(4’)支持体およびモジュールの間におけるすべての方向における調整手段がある調整可能なこの方法において、上記支持体に対して除モジュールを配置することが変更され得る。調整手段は、モジュールのかみ合い点を、改造されるもとのシステムのかみ合い点と一致させることが可能である。モジュールの水平さを実現するために水平面が使用され得る。
(3’)上記かみ合い点の近傍に基部または支持体を位置決めすること
(4’)支持体およびモジュールの間におけるすべての方向における調整手段がある調整可能なこの方法において、上記支持体に対して除モジュールを配置することが変更され得る。調整手段は、モジュールのかみ合い点を、改造されるもとのシステムのかみ合い点と一致させることが可能である。モジュールの水平さを実現するために水平面が使用され得る。
両方の手順において、構造体のもとの横材(すなわち構造体の両側を接続している横断する梁)を利用することが試みられる。しかし、特定の点において横断する梁が新たなシステムの妨げになる場合、それらは排除され、少なくともいくらかの機械的抵抗性の他の要素に置き換えられる。
以下は、非限定的な本発明の例として示されている本発明の実施形態に関して、本発明のより良好な理解を助ける一連の図面の簡単な説明である。
本発明の第1の局面は、人間/物品を移動させるための輸送システムのモジュール(101、201)にとっての支持体(1)に関する。上記輸送システムは、複数のプレートを備えており、システムラインを有している。
当該システムラインは、
(1a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(1b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(1c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(1d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(1e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えている。
上記支持体(1)は、(1f1)上記輸送システムの担持構造(10)に対して上記支持体(1)を固定するために構成されている複数の固定具(11);
(1f2)上記モジュール(101、201)を支持し、水平に配置させる水平のタイプレート(12);
(1f3)上記モジュール(101、201)を支持し、横方向について位置を決める横方向のタイプレート(13);
(1f4)上記モジュール(101、201)を支持し、縦方向について位置を決める縦方向のタイプレート(14)を備えている。
当該システムラインは、
(1a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(1b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(1c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(1d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(1e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えている。
上記支持体(1)は、(1f1)上記輸送システムの担持構造(10)に対して上記支持体(1)を固定するために構成されている複数の固定具(11);
(1f2)上記モジュール(101、201)を支持し、水平に配置させる水平のタイプレート(12);
(1f3)上記モジュール(101、201)を支持し、横方向について位置を決める横方向のタイプレート(13);
(1f4)上記モジュール(101、201)を支持し、縦方向について位置を決める縦方向のタイプレート(14)を備えている。
本発明の他の特徴点によれば、
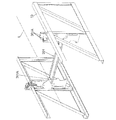
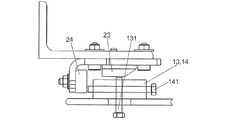
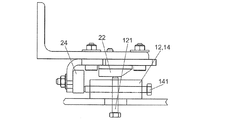
上記水平のタイプレート(12)、上記横方向のタイプレート(13)、および上記縦方向のタイプレート(14)は、上記輸送システムの上記システムラインの許容範囲内に維持させながら上記モジュール(101、201)を配置させるための調節手段(121、131、141)を備えている。
上記水平のタイプレート(12)、上記横方向のタイプレート(13)、および上記縦方向のタイプレート(14)は、上記輸送システムの上記システムラインの許容範囲内に維持させながら上記モジュール(101、201)を配置させるための調節手段(121、131、141)を備えている。
3.上記調節手段(121、131、141)は、
(3a)水平のねじ調節(121);
(3b)横方向のねじ調節(131);
(3c)縦方向のねじ調節(141)を備えている。
(3a)水平のねじ調節(121);
(3b)横方向のねじ調節(131);
(3c)縦方向のねじ調節(141)を備えている。
4.本発明の第2の局面は、人間および/または物品を移動させるための輸送システムのモジュール(101、201、301)に関する。上記輸送システムは、複数のプレートを備えており、システムラインを有している。
当該システムラインは、
(4a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(4b)出口に固定されているプレート(210)の水平面によって規定されている床(200);
(4c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(4d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(4e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120);
(4f)上記輸送システムのシステムラインの許容範囲内に維持させながら、上記モジュール(101、201)を配置させるための位置決めおよび確認の手段(101A、201A、301A)を備えている。
当該システムラインは、
(4a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(4b)出口に固定されているプレート(210)の水平面によって規定されている床(200);
(4c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(4d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(4e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120);
(4f)上記輸送システムのシステムラインの許容範囲内に維持させながら、上記モジュール(101、201)を配置させるための位置決めおよび確認の手段(101A、201A、301A)を備えている。
本発明の他の特徴点によれば、
5.上記モジュール(101、201)は、
(5a)上記モジュール(101、201)にとっての支持体(1)の水平のタイプレート(12)に支持され、水平に配置されるように構成されている複数の水平のプラグ(22);
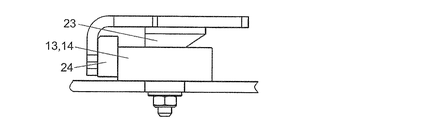
(5b)上記モジュール(101、201)にとっての支持体(1)の横方向のタイプレート(13)に支持され、横方向に配置されるように構成されている複数の横方向のプラグ(23);
(5c)上記モジュール(101、201)にとっての支持体(1)の縦方向のタイプレート(14)に支持され、縦方向に配置されるように構成されている複数の横方向のプラグ(24)を備えている。
5.上記モジュール(101、201)は、
(5a)上記モジュール(101、201)にとっての支持体(1)の水平のタイプレート(12)に支持され、水平に配置されるように構成されている複数の水平のプラグ(22);
(5b)上記モジュール(101、201)にとっての支持体(1)の横方向のタイプレート(13)に支持され、横方向に配置されるように構成されている複数の横方向のプラグ(23);
(5c)上記モジュール(101、201)にとっての支持体(1)の縦方向のタイプレート(14)に支持され、縦方向に配置されるように構成されている複数の横方向のプラグ(24)を備えている。
本発明の種々の実施形態によれば、タイプレート(22、23、24)は、図4に示されているように、同じ要素においてグループ化され得れる。
6.上記モジュール(101、201)は、(6a)上記モジュール(101、201)にとっての上記担持構造(10)の回転表面に対して回転させるように構成されている回転手段(25)を備えている。
7.入口の位置決めおよび確認の上記手段(101A)は、入口かみ合い点(110)を形成している入口のモジュール(101)を、許容範囲内に維持させるように構成されている。
8.出口の位置決めおよび確認の上記手段(201A)は、出口かみ合い点(120)を形成している出口のモジュール(201)を、許容範囲内に維持させるように構成されている。
9.中央の位置決めおよび確認の上記手段(301A)は、先端ライン(300)を形成している中央のモジュール(301)を、許容範囲内に維持させるように構成されている。
本発明の第3の局面は人間/物品のための輸送システムに関する。上記輸送システムは、
(10a)請求項1〜3のいずれか1項に記載の支持体(1)、および入口仕上げ床(100)に接している請求項4〜6のいずれか1項に記載の入口のモジュール(101);
(10b)請求項1〜3のいずれか1項に記載の支持体(1)、および出口仕上げ床(200)に接している請求項4、5または7のいずれか1項に記載の出口のモジュール(201);
(10c)請求項1〜3のいずれか1項に記載の支持体(1)、および中央部にある請求項4または8に記載の中央のモジュール(301)を備えている。
(10a)請求項1〜3のいずれか1項に記載の支持体(1)、および入口仕上げ床(100)に接している請求項4〜6のいずれか1項に記載の入口のモジュール(101);
(10b)請求項1〜3のいずれか1項に記載の支持体(1)、および出口仕上げ床(200)に接している請求項4、5または7のいずれか1項に記載の出口のモジュール(201);
(10c)請求項1〜3のいずれか1項に記載の支持体(1)、および中央部にある請求項4または8に記載の中央のモジュール(301)を備えている。
本発明の他の特徴点によれば、
11.上記システムは、以下の複数の手段:
(11a)下部の固定されているプレート(110)によって規定されている下部の仕上げ床である上記入口仕上げ床(100);
(11b)上部の固定されているプレート(210)によって規定されている上部の仕上げ床である上記出口仕上げ床(200);
中央部におけるエスカレーターの踏み段の先端(310)によって規定されている(11c)上記先端ライン(300);
(11d)上記先端ライン(300)および上記下部の仕上げ床(100)の交点である下部のかみ合い点(110);
(11e)上記先端ライン(300)および上記上部の仕上げ床(200)の交点である上部のかみ合い点(120);
を備えているエスカレーターである。
11.上記システムは、以下の複数の手段:
(11a)下部の固定されているプレート(110)によって規定されている下部の仕上げ床である上記入口仕上げ床(100);
(11b)上部の固定されているプレート(210)によって規定されている上部の仕上げ床である上記出口仕上げ床(200);
中央部におけるエスカレーターの踏み段の先端(310)によって規定されている(11c)上記先端ライン(300);
(11d)上記先端ライン(300)および上記下部の仕上げ床(100)の交点である下部のかみ合い点(110);
(11e)上記先端ライン(300)および上記上部の仕上げ床(200)の交点である上部のかみ合い点(120);
を備えているエスカレーターである。
本発明の第4の局面は、人間/物品を移動させるための輸送システムの改造方法に関する。上記輸送システムは、複数のプレートを備えており、システムラインを有している。上記システムラインは、
(12a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(12b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(12c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(12d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(12e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えている。上記方法は、
(12f)改造されるエスカレーターであり得る上記輸送システムのかみ合い点(120、220)を位置決めすること;
(12g)輸送システムの目的の地点まで上記かみ合い点(120、220)を移動させること;
(12h)担持構造(10)を除いて、改造されるエスカレーターであり得る上記輸送システムの構成要素を取り外すこと;
(12i)上記モジュール(101、201、301)の支持体(1)を上記担持構造(10)に配置すること;
(12j)上記支持体(1)に対して上記モジュール(101、201、301)を配置させること;
(12k)上部のモジュールであり得る入口のモジュール(101)および下部のモジュールであり得る出口のモジュール(201)の間に、上記先端ラインと平行な方向に整列化システムを設置して、整列化線Lを得ること;
(12l)上記中央部または傾斜部(エスカレーターのように入口の水平面と出口の水平面との間に差がある場合)に沿って中央のモジュール(301)の位置決めをすることを包含している。上記(12k)において、上記整列化システムは、細いロープまたは標的に放出するレーザシステムであり得、この段階において、上記整列化システムは、水平に対する所望の程度を形成していることが確認され得る。
(12a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(12b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(12c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(12d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(12e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えている。上記方法は、
(12f)改造されるエスカレーターであり得る上記輸送システムのかみ合い点(120、220)を位置決めすること;
(12g)輸送システムの目的の地点まで上記かみ合い点(120、220)を移動させること;
(12h)担持構造(10)を除いて、改造されるエスカレーターであり得る上記輸送システムの構成要素を取り外すこと;
(12i)上記モジュール(101、201、301)の支持体(1)を上記担持構造(10)に配置すること;
(12j)上記支持体(1)に対して上記モジュール(101、201、301)を配置させること;
(12k)上部のモジュールであり得る入口のモジュール(101)および下部のモジュールであり得る出口のモジュール(201)の間に、上記先端ラインと平行な方向に整列化システムを設置して、整列化線Lを得ること;
(12l)上記中央部または傾斜部(エスカレーターのように入口の水平面と出口の水平面との間に差がある場合)に沿って中央のモジュール(301)の位置決めをすることを包含している。上記(12k)において、上記整列化システムは、細いロープまたは標的に放出するレーザシステムであり得、この段階において、上記整列化システムは、水平に対する所望の程度を形成していることが確認され得る。
本発明の他の特徴点によれば、
13.上記方法は、
(13a)上記かみ合い点(120、220)に対して正確にか;治具および固定具もしくは梁受けを使用することが必要な場合に求められる正確さを実現するためにか;水平であることを必須とする上記支持体の完全な水平さを確保するために、上記モジュール(101、201)の支持体(1)を上記担持構造(10)に対して配置すること;
(13b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように上記タイプレート(12、13、14)および上記プラグ(22、23、24)を重ねて、かつ上記支持体(1)の正しい位置決めを確保して、上記支持体(1)に対して上記モジュール(101、201)を配置することを包含している。上記輸送体の上記かみ合い点および上記モジュール(101、201)のかみ合い点の重なりの結果として、上記固定プラグ(22、23、24)と上記モジュール(101、201)の上記かみ合い点との間における許容範囲を担保する上記モジュール(101、201)の製造の精度をもたらす。次に進む前に、モジュールの正しい配置を確認する必要がある。
13.上記方法は、
(13a)上記かみ合い点(120、220)に対して正確にか;治具および固定具もしくは梁受けを使用することが必要な場合に求められる正確さを実現するためにか;水平であることを必須とする上記支持体の完全な水平さを確保するために、上記モジュール(101、201)の支持体(1)を上記担持構造(10)に対して配置すること;
(13b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように上記タイプレート(12、13、14)および上記プラグ(22、23、24)を重ねて、かつ上記支持体(1)の正しい位置決めを確保して、上記支持体(1)に対して上記モジュール(101、201)を配置することを包含している。上記輸送体の上記かみ合い点および上記モジュール(101、201)のかみ合い点の重なりの結果として、上記固定プラグ(22、23、24)と上記モジュール(101、201)の上記かみ合い点との間における許容範囲を担保する上記モジュール(101、201)の製造の精度をもたらす。次に進む前に、モジュールの正しい配置を確認する必要がある。
14.上記方法は、
(14a)上記かみ合い点(120、220)に関しておおよそ、上記担持構造(10)に対して上記モジュール(101、201)の支持体(1)を配置すること;
(14b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように上記支持体(1)に対する上記モジュール(101、201)の位置を調整して、上記支持体(1)に対して上記モジュール(101、201)を配置することを包含している。この場合、支持体(1)および上記モジュール(101、201)の間にある選択されている要素は、すべての方向に調整要素を有している。水平が利用され得る場合に上記モジュール(101、201)の水平さを実現するために、調整手段は、上記モジュールのかみ合い点をもとのシステムのかみ合い点と重ねることを可能にする。
(14a)上記かみ合い点(120、220)に関しておおよそ、上記担持構造(10)に対して上記モジュール(101、201)の支持体(1)を配置すること;
(14b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように上記支持体(1)に対する上記モジュール(101、201)の位置を調整して、上記支持体(1)に対して上記モジュール(101、201)を配置することを包含している。この場合、支持体(1)および上記モジュール(101、201)の間にある選択されている要素は、すべての方向に調整要素を有している。水平が利用され得る場合に上記モジュール(101、201)の水平さを実現するために、調整手段は、上記モジュールのかみ合い点をもとのシステムのかみ合い点と重ねることを可能にする。
15.上記方法は、(15a)上記担持構造(10)の横断する要素に対して上記中央のモジュール(301)を固定することなく、上記担持構造(10)に対して上記中央のモジュール(301)を固定することをさらに包含している。
16.また、上記改造方法は、
(16a)上記入口のモジュール(101)、上記出口のモジュール(201)および上記中央のモジュール(301)を設置した後に、補助的な要素を取りつけて、上記輸送システムの設置を完了させることを包含している。端部のモジュールである入口のモジュール(101)および出口のモジュール(201)において、大部分の機械装置が集中しているので、エスカレーターの部品の大部分は工場においてすでに組立て済である。経路を閉じるまでを現場において完了させられ得る中央の領域は、より簡単な実施の負荷をともなう。
(16a)上記入口のモジュール(101)、上記出口のモジュール(201)および上記中央のモジュール(301)を設置した後に、補助的な要素を取りつけて、上記輸送システムの設置を完了させることを包含している。端部のモジュールである入口のモジュール(101)および出口のモジュール(201)において、大部分の機械装置が集中しているので、エスカレーターの部品の大部分は工場においてすでに組立て済である。経路を閉じるまでを現場において完了させられ得る中央の領域は、より簡単な実施の負荷をともなう。
Claims (16)
- 人間および/または物品を移動させるための輸送システムのモジュール(101、201)にとっての支持体(1)であって、
上記輸送システムは、複数のプレートを備えており、システムラインを有しており、
当該システムラインは、
(1a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(1b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(1c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(1d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(1e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えており、
支持体(1)は
(1f1)上記輸送システムの担持構造(10)に対して上記支持体(1)を固定するために構成されている複数の固定具(11);
(1f2)上記モジュール(101、201)を支持し、水平に配置させる水平のタイプレート(12);
(1f3)上記モジュール(101、201)を支持し、横方向について位置を決める横方向のタイプレート(13);
(1f4)上記モジュール(101、201)を支持し、縦方向について位置を決める縦方向のタイプレート(14)を備えている、支持体(1)。 - 上記水平のタイプレート(12)、上記横方向のタイプレート(13)、および上記縦方向のタイプレート(14)が、上記輸送システムの上記システムラインの許容範囲内に維持させながら上記モジュール(101、201)を配置させるための調節手段(121、131、141)を備えている、請求項1に記載の支持体(1)。
- 上記調節手段(121、131、141)は、
(3a)水平のねじ調節(121);
(3b)横方向のねじ調節(131);
(3c)縦方向のねじ調節(141)を備えている、モジュール(101、201)にとっての、請求項2に記載の支持体(1)。 - 人間および/または物品を移動させるための輸送システムのモジュール(101、201、301)であって、
上記輸送システムは、複数のプレートを備えており、システムラインを有しており、
当該システムラインは、
(4a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(4b)出口に固定されているプレート(210)の水平面によって規定されている床(200);
(4c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(4d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(4e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120);を備えており、
上記モジュール(101、201、301)は、
(4f)上記輸送システムのシステムラインの許容範囲内に維持させながら、上記モジュール(101、201)を配置させるための、位置決めおよび確認の手段(101A、201A、301A)を備えている、モジュール(101、201、301)。 - (5a)上記モジュール(101、201)にとっての支持体(1)の水平のタイプレート(12)に支持され、水平に配置されるように構成されている複数の水平のプラグ(22);
(5b)上記モジュール(101、201)にとっての支持体(1)の横方向のタイプレート(13)に支持され、横方向に配置されるように構成されている複数の横方向のプラグ(23);
(5c)上記モジュール(101、201)にとっての支持体(1)の縦方向のタイプレート(14)に支持され、縦方向に配置されるように構成されている複数の横方向のプラグ(24)を備えている、請求項4に記載のモジュール(101、201)。 - (6a)上記モジュール(101、201)にとっての担持構造(10)の回転表面に対して回転させるように構成されている回転手段(25)を備えている、請求項5に記載のモジュール(101、201)。
- 入口の位置決めおよび確認の上記手段(101A)は、入口かみ合い点(110)を形成している入口のモジュール(101)を、許容範囲内に維持させるように構成されている、請求項5または6に記載のモジュール。
- 出口の位置決めおよび確認の上記手段(201A)は、出口かみ合い点(120)を形成している出口のモジュール(201)を、許容範囲内に維持させるように構成されている、請求項5または6に記載のモジュール。
- 中央の位置決めおよび確認の上記手段(301A)は、先端ライン(300)を形成している中央のモジュール(301)を、許容範囲内に維持させるように構成されている、請求項4に記載のモジュール。
- (10a)請求項1〜3のいずれか1項に記載の支持体(1)、および入口仕上げ床(100)に接している請求項4〜7のいずれか1項に記載の入口のモジュール(101);
(10b)請求項1〜3のいずれか1項に記載の支持体(1)、および出口仕上げ床(200)に接している請求項4〜6または8のいずれか1項に記載の出口のモジュール(201);
(10c)請求項1〜3のいずれか1項に記載の支持体(1)、および中央部にある請求項4または9に記載の中央のモジュール(301)を備えている、人間/物品のための輸送システム。 - 以下の複数の手段:
(11a)下部の固定されているプレート(110)によって規定されている下部の仕上げ床である上記入口仕上げ床(100);
(11b)上部の固定されているプレート(210)によって規定されている上部の仕上げ床である上記出口仕上げ床(200);
中央部におけるエスカレーターの踏み段の先端(310)によって規定されている(11c)上記先端ライン(300);
(11d)上記先端ライン(300)および上記下部の仕上げ床(100)の交点である下部のかみ合い点(110);
(11e)上記先端ライン(300)および上記上部の仕上げ床(200)の交点である上部のかみ合い点(120);
を備えているエスカレーターである、請求項10に記載のシステム。 - 人間および/または物品を移動させるための輸送システムを改造する方法であって、
上記輸送システムは、複数のプレートを備えており、システムラインを有しており、
当該システムラインは、
(12a)入口に固定されているプレート(110)の水平面によって規定されている入口仕上げ床(100);
(12b)出口に固定されているプレート(210)の水平面によって規定されている出口仕上げ床(200);
(12c)上記入口仕上げ床(100)および上記出口仕上げ床(200)の間に備えられている中央部におけるプレートの先端(310)によって規定されている先端ライン(300);
(12d)上記先端ライン(300)および上記入口仕上げ床(100)の交点である入口かみ合い点(110);
(12e)上記先端ライン(300)および上記出口仕上げ床(200)の交点である出口かみ合い点(120)を備えており、
上記方法は、
(12f)上記輸送システムのかみ合い点(120、220)を位置決めすること;
(12g)輸送システムのエンドポイントまで上記かみ合い点(120、220)を移動させること;
(12h)担持構造(10)を除いて、上記輸送システムの構成要素を取り外すこと;
(12i)請求項4〜9のいずれか1項に記載のモジュール(101、201、301)の、請求項1〜3のいずれか1項に記載の支持体(1)を上記担持構造(10)に対して配置すること;
(12j)上記支持体(1)に対して上記モジュール(101、201、301)を配置させること;
(12k)入口のモジュール(101)および出口のモジュール(201)の間に、上記先端ラインと平行な方向に整列化システムを設置して、整列化線Lを得ること;
(12l)上記中央部に沿って中央のモジュール(301)の位置決めをすること
を包含している、方法。 - (13a)上記かみ合い点(120、220)に関して正確に、上記担持構造(10)に対して上記モジュール(101、201)の支持体(1)を配置すること;
(13b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように、上記タイプレート(12、13、14)および上記プラグ(22、23、24)を重ねて、上記支持体(1)に対して上記モジュール(101、201)を配置すること
を包含している、請求項12に記載の方法。 - (14a)上記かみ合い点(120、220)に関しておおよそに、上記担持構造(10)に対して上記モジュール(101、201)の支持体(1)を配置すること;
(14b)上記モジュール(101、201)の上記かみ合い点が上記輸送システムの上記かみ合い点と重なるように上記支持体(1)に対する上記モジュール(101、201)の位置を調整して、上記支持体(1)に対して上記モジュール(101、201)を配置すること
を包含している、請求項12に記載の方法。 - (15a)上記担持構造(10)の横断する要素に対して上記中央のモジュール(301)を固定することなく、上記担持構造(10)に対して上記中央のモジュール(301)を固定することをさらに包含している、請求項12〜14のいずれか1項に記載の方法。
- (16a)上記入口のモジュール(101)、上記出口のモジュール(201)および上記中央のモジュール(301)を設置した後に、補助的な要素を取りつけて、上記輸送システムの設置を完了させることをさらに包含している、請求項12〜15のいずれか1項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/115,778 US8950568B2 (en) | 2011-05-25 | 2011-05-25 | Support, module, transport system for displacement of people/goods and modernization method of people/goods transport systems |
| US13/115,778 | 2011-05-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012246142A true JP2012246142A (ja) | 2012-12-13 |
Family
ID=47218477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012118550A Pending JP2012246142A (ja) | 2011-05-25 | 2012-05-24 | 支持体、モジュール、人間/物品を移動させるための輸送システム、および人間/物品の輸送システムの改造方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8950568B2 (ja) |
| JP (1) | JP2012246142A (ja) |
| CN (1) | CN102992157B (ja) |
| BR (1) | BR102012012611B1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017126177A1 (ja) * | 2016-01-21 | 2017-07-27 | 三菱電機株式会社 | 乗客コンベヤ |
| WO2017153314A1 (de) * | 2016-03-10 | 2017-09-14 | Inventio Ag | Vorrichtung zum roboterunterstützten herstellen eines tragwerkes für eine personentransportanlage |
| TWI720212B (zh) | 2016-06-21 | 2021-03-01 | 瑞士商伊文修股份有限公司 | 將手扶梯或移動步道現代化之方法、用於此方法的裝置組合及新的橫樑 |
| TW201803798A (zh) * | 2016-06-21 | 2018-02-01 | 伊文修股份有限公司 | 具有用於識別受損的踏板單元之監視及標記機構的人員輸送裝置 |
| AT522646B1 (de) * | 2019-06-12 | 2021-04-15 | Innova Patent Gmbh | Plattenförderer |
| CN111532955A (zh) * | 2020-06-22 | 2020-08-14 | 苏州汉森电梯有限公司 | 一种嵌入式更新型自动扶梯 |
| EP3932845A1 (de) * | 2020-06-30 | 2022-01-05 | TK Elevator Innovation and Operations GmbH | Verbindungsstütze eines trägers für eine fahrtreppe oder einen fahrsteig |
| ES3014918T3 (en) * | 2021-03-26 | 2025-04-28 | Inventio Ag | Support structure of an escalator or moving walkway |
| EP4353664A1 (de) * | 2022-10-10 | 2024-04-17 | TK Elevator Innovation and Operations GmbH | Fahrwegvorrichtung mit wenigstens drei längsabschnitten sowie verfahren und verwendung |
| EP4353654A1 (de) * | 2022-10-10 | 2024-04-17 | TK Elevator Innovation and Operations GmbH | Fahrwegvorrichtung mit wenigstens drei längsabschnitten sowie verfahren und verwendung |
| CN120035560A (zh) | 2022-10-10 | 2025-05-23 | 蒂森克虏伯电梯创新与运营有限公司 | 具有至少三个纵向区段的行进装置、以及方法和应用 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3991877A (en) * | 1975-02-20 | 1976-11-16 | Westinghouse Electric Corporation | Transportation apparatus |
| US4396110A (en) * | 1981-03-03 | 1983-08-02 | Christensen Frantz G | Multi-section conveyor and coupler therefor |
| JPS58193880A (ja) | 1982-04-30 | 1983-11-11 | 株式会社日立製作所 | マンコンベアの改修方法 |
| US4535880A (en) * | 1983-09-15 | 1985-08-20 | Westinghouse Electric Corp. | Escalator |
| US5307918A (en) * | 1992-09-15 | 1994-05-03 | Otis Elevator Company | Escalator combplate stop switch assembly |
| US5341909A (en) * | 1993-08-30 | 1994-08-30 | Otis Elevator Company | Linear wheel escalator handrail drive |
| US5307920A (en) * | 1993-09-14 | 1994-05-03 | Otis Elevator Company | Moving handrail drive |
| US5366060A (en) * | 1993-10-07 | 1994-11-22 | Johnson Gerald E | Balustrade handrail entry housing |
| US5638937A (en) * | 1995-01-13 | 1997-06-17 | Inventio Ag | Handrail drive system conversion |
| US6155400A (en) * | 1998-03-23 | 2000-12-05 | Rahco International, Inc. | Mobile conveyor including adaptive alignment system |
| US6422376B1 (en) * | 2000-10-11 | 2002-07-23 | Sunflower Manufacturing Company, Inc. | Auger coupler |
| US6644457B2 (en) * | 2002-01-10 | 2003-11-11 | Inventio Ag | Escalator combteeth force detector |
| US6811018B2 (en) * | 2002-02-11 | 2004-11-02 | Rapistan Systems Advertising Corp. | Belt conveyor |
| US6685002B1 (en) * | 2002-10-15 | 2004-02-03 | Kone Corporation | Method of escalator modernization |
| DE60325259D1 (de) * | 2002-10-28 | 2009-01-22 | Dematic Corp | Förderer mit einem verbindungsstück zum verstellen der relativen winkellage von zwei aufeinanderfolgenden förderstrecken |
| JP4309123B2 (ja) * | 2002-12-24 | 2009-08-05 | 東芝エレベータ株式会社 | マンコンベア乗降口の安全装置 |
| JP5087217B2 (ja) * | 2004-11-08 | 2012-12-05 | インベンテイオ・アクテイエンゲゼルシヤフト | エスカレータまたは動く歩道 |
| JP2006199434A (ja) * | 2005-01-20 | 2006-08-03 | Toshiba Elevator Co Ltd | エスカレータのモダニゼーション工法およびエスカレータ |
| FI119369B (fi) * | 2006-05-30 | 2008-10-31 | Kone Corp | Järjestely liukukäytävän käyttökoneistossa ja menetelmä liukukäytävän käsikaiteen kaidehihnan käyttöhihnan vaihtamiseksi |
| US8096408B2 (en) * | 2008-04-07 | 2012-01-17 | Muratec Automation Co., Ltd. | Segmented material conveyor system, threshold assembly and method for making and using the same |
| DE102009017076B4 (de) * | 2009-04-09 | 2012-06-28 | Kone Corp. | Einrichtung zum Personentransport |
-
2011
- 2011-05-25 US US13/115,778 patent/US8950568B2/en active Active
-
2012
- 2012-05-24 JP JP2012118550A patent/JP2012246142A/ja active Pending
- 2012-05-25 CN CN201210165747.3A patent/CN102992157B/zh active Active
- 2012-05-25 BR BR102012012611-7A patent/BR102012012611B1/pt active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| BR102012012611A2 (pt) | 2013-06-25 |
| BR102012012611B1 (pt) | 2021-06-29 |
| CN102992157B (zh) | 2017-03-01 |
| CN102992157A (zh) | 2013-03-27 |
| US8950568B2 (en) | 2015-02-10 |
| US20120298480A1 (en) | 2012-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012246142A (ja) | 支持体、モジュール、人間/物品を移動させるための輸送システム、および人間/物品の輸送システムの改造方法 | |
| EP2527283B1 (en) | Support for a module of a transport system for displacement of people/goods | |
| ES2864998T3 (es) | Procedimiento para la modernización de una escalera mecánica o de un pasillo rodante | |
| ES2900448T3 (es) | Cercha modular para escaleras mecánicas/pasillos rodantes y procedimiento de ensamblaje de una cercha modular para escaleras mecánicas/pasillos rodantes | |
| JP2015526612A (ja) | スクリーンを登るための改善されたフレーム | |
| ES2671124T3 (es) | Sistema de vía de rodadura para una escalera mecánica o un pasillo rodante | |
| JPH07206348A (ja) | 人移動装置の欄干の組立方法 | |
| CN111377346A (zh) | 乘客传送带的坠落物防止护栏以及乘客传送带 | |
| JP6199425B2 (ja) | 乗客コンベア及びその取り付け方法 | |
| JP4748637B2 (ja) | 建物ユニットの接合構造 | |
| KR20110069175A (ko) | 노광 장치와 그 조립 방법, 및 디바이스 제조 방법 | |
| JP6579591B1 (ja) | エレベータの乗場装置、エレベータの乗場装置の据え付け方法 | |
| JP6356279B1 (ja) | 乗客コンベア及びその取り付け方法 | |
| JP6650416B2 (ja) | 乗客コンベア及び乗客コンベアのリニューアル方法 | |
| US20230002198A1 (en) | Method for erecting a supporting structure of an escalator or a moving walkway | |
| JP5366042B2 (ja) | ユニット式エレベータ | |
| JP4756912B2 (ja) | 乗客コンベアの組立方法及び組立治具 | |
| EP0475074A1 (en) | Procedure for the installation of the landing doors of an elevator | |
| CN115897982B (zh) | 一种建筑行业用便于调节的爬架系统 | |
| JP6184572B1 (ja) | 乗客コンベア及びその取り付け方法 | |
| JP6226805B2 (ja) | 乗客コンベア | |
| JP2017193398A (ja) | 乗客コンベア及び乗客コンベアの脱落防止装置 | |
| KR20230128643A (ko) | 모듈러 유닛의 천장 설비 시공 시스템 및 시공 방법 | |
| CN120035560A (zh) | 具有至少三个纵向区段的行进装置、以及方法和应用 | |
| JP2021017776A (ja) | 棚レール据付治具と棚レール据付方法 |