JP2012246860A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2012246860A JP2012246860A JP2011120126A JP2011120126A JP2012246860A JP 2012246860 A JP2012246860 A JP 2012246860A JP 2011120126 A JP2011120126 A JP 2011120126A JP 2011120126 A JP2011120126 A JP 2011120126A JP 2012246860 A JP2012246860 A JP 2012246860A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- phase
- torque
- valve
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【課題】エンジンを停止する際、インテークバルブの位相を最遅角の位相まで遅角するとともに、モータジェネレータにより発電する。
【解決手段】エンジンでの燃料供給が停止されてからエンジンの出力軸が停止するまでの間に、インテークバルブの位相が最遅角の位相まで遅角される。エンジンでの燃料供給が停止された後、第1モータジェネレータにより、エンジンの出力軸の回転方向とは逆方向にトルクが付加される。第1モータジェネレータからエンジンに付加されるトルクは、インテークバルブの位相の遅角を開始してからの変化量が大きいほど、増大される。
【選択図】図7
【解決手段】エンジンでの燃料供給が停止されてからエンジンの出力軸が停止するまでの間に、インテークバルブの位相が最遅角の位相まで遅角される。エンジンでの燃料供給が停止された後、第1モータジェネレータにより、エンジンの出力軸の回転方向とは逆方向にトルクが付加される。第1モータジェネレータからエンジンに付加されるトルクは、インテークバルブの位相の遅角を開始してからの変化量が大きいほど、増大される。
【選択図】図7
Description
本発明は、車両の制御装置に関し、特に、吸気バルブまたは排気バルブの位相を変更可能なエンジンに連結された発電機により発電する技術に関する。
エンジンに加えて、走行用の電動モータを搭載したハイブリッド車が知られている。このような車両の一部は、電気自動車として分類される場合もある。ハイブリッド車には、エンジンによって駆動される発電機が搭載されたものもある。発電機は、様々な運転状態において発電するように制御される。一例として、エンジンを停止するためにエンジンでの燃料噴射が停止された後、エンジンの出力軸が停止するまでの間に、エンジンの運動エネルギーを回収すべく、発電機が発電する。
発電機が発電する間、エンジンの出力軸には回転方向とは逆方向にトルクが作用する。したがって、トルクが大きいほど、エンジンの出力軸が速やかに停止する。しかしながら、エンジンの出力軸が早く停止すると、インテークバルブやエキゾーストバルブが開閉する位相(クランク角)を運転状態に応じて変更する可変バルブタイミング機構が設けられ、かつエンジンの停止時にバルブの位相が所定の位相まで変更されるエンジンにおいて、位相の変更が完了する前に、エンジンの出力軸が停止することがあり得る。エンジンの出力軸が停止すると、カムシャフトを回転させるために必要なトルクが非常に大きくなるため、エンジンの出力軸が停止した後は位相を変更することが困難である。したがって、バルブの位相の制御精度が悪化し得る。
このような事項に鑑み、特開2008−57442号公報(特許文献1)は、エンジン停止指示の発生後、エンジン停止までにバルブの開閉タイミングを所定の領域内へ変更可能でないときに、エンジンの回転速度を低下させるためのトルクをエンジンの出力軸に付加しないようにすることを開示する。
しかしながら、トルクをエンジンに付与しないようにすると、発電機による発電を実施できない。
本発明は、上述の課題に鑑みてなされたものであって、その目的は、バルブの位相を変更するとともに、発電することである。
吸気バルブおよび排気バルブのうちの少なくともいずれか一方のバルブの位相を変更可能なエンジンと、エンジンにより駆動されて発電する発電機とが設けられた車両の制御装置は、エンジンでの燃料供給が停止された後、バルブの位相を変更するための変更手段と、エンジンでの燃料供給が停止された後、発電機にエンジンの出力軸の回転方向とは逆方向にトルクを付与させ、かつ、バルブの位相の変更を開始してからの変化量が大きいほど、発電機のトルクを増大するための制御手段とを備える。
この構成によると、バルブの位相の変更を開始した直後は発電機のトルクを小さくしてエンジンの出力軸を回転させ続け、バルブの位相の変更が完了すると、発電機のトルクを大きくして発電される電力を大きくできる。そのため、バルブの位相を変更するとともに、発電することができる。
別の実施例において、制御手段は、バルブの位相が所定の位相まで変化した後の発電機のトルクを、バルブの位相が所定の位相まで変化する前の発電機のトルクよりも大きくする。
この構成によると、所定の位相までバルブの位相を変更するとともに、発電することができる。
さらに別の実施例において、変更手段は、エンジンでの燃料供給が停止された後、バルブの位相を遅角する。制御手段は、バルブの位相が最遅角の位相まで変化した後の発電機のトルクを、バルブの位相が最遅角の位相まで変化する前の発電機のトルクよりも大きくする。
この構成によると、最遅角の位相までバルブの位相を変更するとともに、発電することができる。
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同一である。したがって、それらについての詳細な説明は繰返さない。
図1を参照して、ハイブリッド車のパワートレーンについて説明する。ハイブリッド車の代わりに、エンジンによる走行距離の拡張機能を有する電気自動車を用いてもよい。
図1に示すように、パワートレーンは、エンジン1000と、第1モータジェネレータ200と、これらエンジン1000と第1モータジェネレータ200との間でトルクを合成もしくは分配する動力分割機構300と、第2モータジェネレータ400と、変速機500とを主体として構成されている。
エンジン1000は、燃料を燃焼させて動力を出力する公知の内燃機関であって、スロットル開度(吸気量)や燃料供給量、点火時期などの運転状態を電気的に制御できるように構成されている。その制御は、例えば、マイクロコンピュータを主体とするECU(Electronic Control Unit)100によって行なわれる。なお、エンジン1000の詳細については後述する。ECU100は複数のECUに分割するようにしてもよい。
第1モータジェネレータ200は、一例として三相交流回転電機であって、電動機(モータ)としての機能と発電機(ジェネレータ)としての機能とを生じるように構成される。インバータ210を介してバッテリなどの蓄電装置700に接続されている。インバータ210を制御することにより、第1モータジェネレータ200の出力トルクあるいは回生トルクを適宜に設定するようになっている。その制御は、ECU100によって行なわれる。なお、第1モータジェネレータ200のステータ(図示せず)は固定されており、回転しないようになっている。
動力分割機構300は、外歯歯車であるサンギヤ(S)310と、そのサンギヤ(S)310に対して同心円上に配置された内歯歯車であるリングギヤ(R)320と、これらサンギヤ(S)310とリングギヤ(R)320とに噛合しているピニオンギヤを自転かつ公転自在に保持しているキャリヤ(C)330とを三つの回転要素として差動作用を生じる公知の歯車機構である。エンジン1000の出力軸がダンパを介して第1の回転要素であるキャリヤ(C)330に連結されている。言い換えれば、キャリヤ(C)330が入力要素となっている。
これに対して第2の回転要素であるサンギヤ(S)310に第1モータジェネレータ200のロータ(図示せず)が連結されている。したがってサンギヤ(S)310がいわゆる反力要素となっており、また第3の回転要素であるリングギヤ(R)320が出力要素となっている。そして、そのリングギヤ(R)320が、駆動輪(図示せず)に連結された出力軸600に連結されている。
図2に、動力分割機構300の共線図を示す。図2に示すように、キャリヤ(C)33
0に入力されるエンジン1000の出力するトルクに対して、第1モータジェネレータ200による反力トルクをサンギヤ(S)310に入力すると、これらのトルクを加減算した大きさのトルクが、出力要素となっているリングギヤ(R)320に現れる。その場合、第1モータジェネレータ200のロータがそのトルクによって回転し、第1モータジェネレータ200は発電機として機能する。また、リングギヤ(R)320の回転数(出力回転数)を一定とした場合、第1モータジェネレータ200の回転数を大小に変化させることにより、エンジン1000の回転数を連続的に(無段階に)変化させることができる。すなわち、エンジン1000の回転数を例えば燃費が最もよい回転数に設定する制御を、第1モータジェネレータ200を制御することによって行なうことができる。その制御は、ECU100によって行なわれる。
0に入力されるエンジン1000の出力するトルクに対して、第1モータジェネレータ200による反力トルクをサンギヤ(S)310に入力すると、これらのトルクを加減算した大きさのトルクが、出力要素となっているリングギヤ(R)320に現れる。その場合、第1モータジェネレータ200のロータがそのトルクによって回転し、第1モータジェネレータ200は発電機として機能する。また、リングギヤ(R)320の回転数(出力回転数)を一定とした場合、第1モータジェネレータ200の回転数を大小に変化させることにより、エンジン1000の回転数を連続的に(無段階に)変化させることができる。すなわち、エンジン1000の回転数を例えば燃費が最もよい回転数に設定する制御を、第1モータジェネレータ200を制御することによって行なうことができる。その制御は、ECU100によって行なわれる。
走行中にエンジン1000を停止させていれば、第1モータジェネレータ200が逆回転しており、その状態から第1モータジェネレータ200を電動機として機能させて正回転方向にトルクを出力させると、キャリヤ(C)330に連結されているエンジン1000にこれを正回転させる方向のトルクが作用し、第1モータジェネレータ200によってエンジン1000を始動(モータリングもしくはクランキング)することができる。その場合、出力軸600にはその回転を止める方向のトルクが作用する。したがって走行のための駆動トルクは、第2モータジェネレータ400の出力するトルクを制御することにより維持でき、同時にエンジン1000の始動を円滑におこなうことができる。なお、この種のハイブリッド形式は、機械分配式あるいはスプリットタイプと称されている。
図1に戻って、第2モータジェネレータ400は、一例として三相交流回転電機であって、電動機としての機能と発電機としての機能とを生じるように構成される。インバータ212を介してバッテリなどの蓄電装置700接続されている。インバータ212を制御することにより、力行および回生ならびにそれぞれの場合におけるトルクを制御するように構成されている。なお、第2モータジェネレータ400のステータ(図示せず)は固定されており、回転しないようになっている。
変速機500は、一組のラビニョ型遊星歯車機構によって構成されている。それぞれ外歯歯車である第1サンギヤ(S1)510と第2サンギヤ(S2)520とが設けられており、その第1サンギヤ(S1)510に第1のピニオン531が噛合するとともに、その第1のピニオン531が第2のピニオン532に噛合し、その第2のピニオン532が各サンギヤ510,520と同心円上に配置されたリングギヤ(R)540に噛合している。
なお、各ピニオン531,532は、キャリヤ(C)550によって自転かつ公転自在に保持されている。また、第2サンギヤ(S2)520が第2のピニオン532に噛合している。したがって第1サンギヤ(S1)510とリングギヤ(R)540とは、各ピニオン531,532と共にダブルピニオン型遊星歯車機構に相当する機構を構成し、また第2サンギヤ(S2)520とリングギヤ(R)540とは、第2のピニオン532と共にシングルピニオン型遊星歯車機構に相当する機構を構成している。
さらに、変速機500には、第1サンギヤ(S1)510を選択的に固定するB1ブレーキ561と、リングギヤ(R)540を選択的に固定するB2ブレーキ562とが設けられている。これらのブレーキ561,562は摩擦力によって係合力を生じるいわゆる摩擦係合要素であり、多板形式の係合装置あるいはバンド形式の係合装置を採用することができる。そして、これらのブレーキ561,562は、油圧による係合力に応じてそのトルク容量が連続的に変化するように構成されている。さらに、第2サンギヤ(S2)520に前述した第2モータジェネレータ400が連結される。キャリヤ(C)550が出力軸600に連結される。
したがって、上記の変速機500は、第2サンギヤ(S2)520がいわゆる入力要素であり、またキャリヤ(C)550が出力要素となっており、B1ブレーキ561を係合させることにより変速比が「1」より大きい高速段が設定される。B1ブレーキ561に替えてB2ブレーキ562を係合させることにより、高速段より変速比の大きい低速段が設定される。
この各変速段の間での変速は、車速や要求駆動力(もしくはアクセル開度)などの走行状態に基づいて実行される。より具体的には、変速段領域を予めマップ(変速線図)として定めておき、検出された運転状態に応じていずれかの変速段を設定するように制御される。
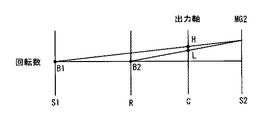
図3に、変速機500の共線図を示す。図3に示すように、B2ブレーキ562によってリングギヤ(R)540を固定すれば、低速段Lが設定され、第2モータジェネレータ400の出力したトルクが変速比に応じて増幅されて出力軸600に付加される。これに対してB1ブレーキ561によって第1サンギヤ(S1)510を固定すれば、低速段Lより変速比の小さい高速段Hが設定される。この高速段Hにおける変速比も“1”より大きいので、第2モータジェネレータ400の出力したトルクがその変速比に応じて増大させられて出力軸600に付加される。
なお、各変速段L,Hが定常的に設定されている状態では、出力軸600に付加されるトルクは、第2モータジェネレータ400の出力トルクを変速比に応じて増大させたトルクとなるが、変速過渡状態では各ブレーキ561,562でのトルク容量や回転数変化に伴う慣性トルクなどの影響を受けたトルクとなる。また、出力軸600に付加されるトルクは、第2モータジェネレータ400の駆動状態では、正トルクとなり、被駆動状態では負トルクとなる。
本実施の形態において、ハイブリッド車は、エンジン1000のみの駆動力を用いる第1走行モード、エンジン1000が停止した状態で第2モータジェネレータ400のみの駆動力を用いる第2走行モード、エンジン1000および第2モータジェネレータ400の両方の駆動力を用いる第3走行モードのうちのいずれかのモードで走行する。アクセル開度、蓄電装置700の残存容量などの種々のパラメータに基づいて、走行モードが選択される。
なお、走行モードの選択方法については、ハイブリッド車の技術分野において周知の技術を利用すればよいため、ここでは更なる詳細な説明は繰り返さない。また、モードの数は3つに限らない。
図4を参照して、エンジン1000についてさらに説明する。
エンジン1000は、Aバンク1011と、Bバンク1012とが設けられたV型エンジンである。V型以外のエンジンを用いてもよい。例えば、直列型のエンジンを用いてもよい。
エンジン1000は、Aバンク1011と、Bバンク1012とが設けられたV型エンジンである。V型以外のエンジンを用いてもよい。例えば、直列型のエンジンを用いてもよい。
エンジン1000には、エアクリーナ1020から空気が吸入される。吸入空気量は、スロットルバルブ1030により調整される。スロットルバルブ1030はモータにより駆動される電子スロットルバルブである。
空気は、吸気通路1032を通って、Aバンク1011に設けられた4つの気筒(シリンダ)1041、および、Bバンク1012に設けられた4つのシリンダ1042に導入される。シリンダの合計数は6、10または12であってもよい。また、シリンダの合計数は、それら以外であってもよい。
空気は、シリンダ1041,1042において燃料と混合される。Aバンク1011のシリンダ1041の各々には、シリンダ1041の各々に対して一つずつ設けられたインジェクタ1051から燃料が直接噴射される。同様に、Bバンク1012のシリンダ1042の各々には、シリンダ1042の各々に対して一つずつ設けられたインジェクタ1052から燃料が直接噴射される。燃料は吸気行程において噴射される。なお、燃料が噴射される時期は、吸気行程に限らない。
本実施の形態においては、インジェクタ1051,1052の噴射孔がシリンダ1041,1042内に設けられた直噴エンジンとしてエンジン1000を説明するが、直噴用のインジェクタ1051,1052に加えて、ポート噴射用のインジェクタを設けてもよい。さらに、ポート噴射用のインジェクタのみを設けるようにしてもよい。
Aバンク1011のシリンダ1041内の混合気は、シリンダ1041の各々に対して一つずつ設けられた、点火プラグ1061により着火され、燃焼する。同様にBバンク1012のシリンダ1042内の混合気は、シリンダ1042の各々に対して一つずつ設けられた点火プラグ1062により着火され、燃焼する。燃焼後の混合気、すなわち排気ガスは、三元触媒1070により浄化された後、車外に排出される。混合気の燃焼により、Aバンク1011の各シリンダ1041に対して設けられたピストン1081および、
Bバンク1012の各シリンダ1042に対して設けられたピストン1082が押し下げられ、クランクシャフト1090が回転する。
Bバンク1012の各シリンダ1042に対して設けられたピストン1082が押し下げられ、クランクシャフト1090が回転する。
シリンダ1041,1042の各々の頭頂部には、インテークバルブ1101,1102およびエキゾーストバルブ1111,1112が設けられる。
Aバンク1011内のシリンダ1041に対して設けられたインテークバルブ1101は、インテークカムシャフト1121により駆動される。Aバンク1011内のシリンダ1041に対して設けられたエキゾーストバルブ1111は、エキゾーストカムシャフト1131により駆動される。
同様に、Bバンク1012内のシリンダ1042に対して設けられたインテークバルブ1102は、インテークカムシャフト1122により駆動される。Bバンク1012内のシリンダ1042に対して設けられたエキゾーストバルブ1112は、エキゾーストカムシャフト1132により駆動される。Aバンク1011のインテークカムシャフト1121と、エキゾーストカムシャフト1131とは、チェーンやギヤ等により連結され、同じ回転数で回転する。同様に、Bバンク1012のインテークカムシャフト1122と、エキゾーストカムシャフト1132とは、チェーンやギヤ等により連結され、同じ回転数で回転する。
Aバンク1011内のインテークバルブ1101の位相(開閉タイミング)は、インテークカムシャフト1121に設けられた可変バルブタイミング機構2001により制御される。同様に、Bバンク1012内のインテークバルブ1102の位相は、インテークカムシャフト1122に設けられた可変バルブタイミング機構2002により制御される。
可変バルブタイミング機構2001,2002は、クランクシャフト1090と連結駆動される回転体と、同回転体の内周であって、同軸に設けられ、カムシャフト1121,1122と連結駆動される回転体とが、油圧や電力によって相対的に回転可能に構成された機構である。
本実施の形態においては、インテークカムシャフト1121,1122が可変バルブタイミング機構2001,2002により回転されることにより、インテークバルブ1101,1102の位相が制御される。なお、位相を制御する方法はこれに限らない。
なお、Aバンク1011内のエキゾーストバルブ1111の位相を制御する可変バルブタイミング機構、および、Bバンク1012内のエキゾーストバルブ1112の位相を制御する可変バルブタイミング機構を設けてもよい。
Aバンク1011の可変バルブタイミング機構2001およびBバンク1012の可変バルブタイミング機構2002は、油圧により作動する。可変バルブタイミング機構2001,2002には、周知の一般的な可変バルブタイミング機構を用いればよいため、ここではさらなる詳細な説明は繰り返さない。なお、可変バルブタイミング機構2001,2002を電動モータにより作動するように構成してもよい。
可変バルブタイミング機構2001,2002は、ECU100により制御される。より具体的には、可変バルブタイミング機構2001,2002に供給される油圧、または可変バルブタイミング機構2001,2002から排出される油圧が、ECU100によって制御される。
ECU100には、クランク角センサ5000からクランクシャフト1090のクランク角を表すパルス信号が入力される。ECU100は、クランク角センサ5000から入力されたパルス信号に基づいて、エンジン1000の回転数(回転速度)NEを検出する。なお、エンジン回転数NEを検出する方法については周知の一般的な方法を利用すればよいため、ここではその詳細な説明は繰り返さない。
また、ECU100には、Aバンク1011のカムポジションセンサ5011からインテークカムシャフト1121の位相(回転方向におけるカムシャフトの位置)を表すパルス信号(インテークバルブ1101の位相を表わす信号)が入力される。同様に、ECU100には、Bバンク1012のカムポジションセンサ5012からインテークカムシャフト1122の位相を表すパルス信号(インテークバルブ1102の位相を表わす信号)が入力される。
さらに、ECU100には、水温センサ5020からエンジン1000の水温(冷却水の温度)を表す信号が、エアフローメータ5030からエンジン1000の吸入空気量(エンジン1000に吸入される空気量)を表す信号が入力される。
ECU100は、これらのセンサから入力された信号、ROM102に記憶されたマップおよびプログラムに基づいて、エンジン1000が所望の運転状態になるように、スロットル開度、点火時期、燃料噴射時期、燃料噴射量、インテークバルブ1101,1102の位相などを制御する。
図5に示すように、ECU100は、エンジン1000の負荷KLおよびエンジン回転数NEをパラメータに有するマップに基づいて、インテークバルブ1101,1102の位相を決定する。すなわち、インテークバルブ1101,1102の位相は、エンジン回転数NEおよび負荷KLに応じて変化するように制御される。
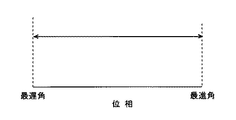
図6に示すように、インテークバルブ1101,1102の位相は、最遅角の位相から最進角の位相の間で変化するように制御される。最遅角の位相および最進角の位相は、可変バルブタイミング機構2001,2002の構造から必然的に定まる。
本実施の形態において、最遅角の位相は、エンジン1000の始動時の燃焼状態等が好適になるように定められる。インテークバルブ1101,1102の位相を最遅角の位相にした状態でエンジン1000を始動すべく、本実施の形態においては、図7に示すように、エンジン1000の停止指令が発せられたときにインテークバルブ1101,1102の位相が最遅角の位相でなければ、エンジン1000での燃料供給が停止されてからエンジン1000の出力軸(クランクシャフト1090)が停止するまでの間、すなわちエンジン1000の停止処理の実行中に、インテークバルブ1101,1102の位相が最遅角の位相まで遅角される。
さらに、エンジン1000の停止処理においては、第1モータジェネレータ200により、エンジン1000の出力軸の回転方向とは逆方向にトルクが付加される。すなわち、エンジン1000の負荷となる負のトルク(回生トルク)が第1モータジェネレータ200により付加される。第1モータジェネレータ200は、付加したトルクに応じた電力を発電する。
エンジン1000の停止処理中において第1モータジェネレータ200からエンジン1000に付加されるトルク(トルクの絶対値)は、インテークバルブ1101,1102の位相に応じて変更される。
一例として、図7に示すように、インテークバルブ1101,1102の位相の遅角を開始してからの変化量が大きいほど、トルクが増大される。より具体的には、インテークバルブ1101,1102の位相が最遅角の位相まで変化した後の第1モータジェネレータ200のトルクが、インテークバルブ1101,1102の位相が最遅角の位相まで変化する前の第1モータジェネレータ200のトルクよりも大きくされる。
その結果、図7において破線で示すように、インテークバルブ1101,1102の位相を遅角する速度が遅いほど、第1モータジェネレータ200のトルクが低く維持される時間が長くなる。
本実施の形態においては、インテークバルブ1101,1102の位相が最遅角の位相まで変化するまでの間は、エンジン1000の出力軸が停止しない範囲でのトルクがエンジン1000に付加される。トルクの大きさは、実験およびシミュレーションの結果等に基づいて開発者により予め定められる。
なお、エンジン1000の停止処理において、インテークバルブ1101,1102の位相を、最遅角の位相ではなく、最進角の位相まで進角するようにしてもよい。インテークバルブ1101,1102の位相を、最遅角の位相と最進角の位相との間の所定の位相まで進角または遅角するようにしてもよい。したがって、インテークバルブ1101,1102の位相が所定の位相まで変化した後の第1モータジェネレータ200のトルクを、インテークバルブ1101,1102の位相が所定の位相まで変化する前の第1モータジェネレータ200のトルクを大きくするようにしてもよい。
図8を参照して、本実施の形態においてECU100が実行する処理について説明する。以下に説明する処理は、ソフトウェアにより実現してもよく、ハードウェアにより実現してもよく、ソフトウェアとハードウェアとの協働により実現してもよい。また、以下に説明する処理は、たとえばイグニッションスイッチがオフにされたり、ハイブリッド車の走行モードが変更されたりすることに起因してエンジン1000を停止する際に実行される。
S100にて、エンジン1000における燃料供給(燃料噴射)が停止される。その後、S102にて、インテークバルブ1101,1102の位相が変更される。具体的には、インテークバルブ1101,1102の位相が遅角される。
インテークバルブ1101,1102の位相が最遅角の位相、もしくは略最遅角の位相まで遅角される前においては(S104にてNO)、S106にて、エンジン1000の出力軸が停止しない範囲で、第1モータジェネレータ200から、エンジン1000の出力軸の回転方向とは逆方向にトルクが付加される。一例として、予め定められた一定のトルクがエンジン1000に付加される。
インテークバルブ1101,1102の位相が最遅角の位相、もしくは略最遅角の位相まで遅角された後は(S104にてYES)、S108にて、インテークバルブ1101,1102の位相が最遅角の位相、もしくは略最遅角の位相まで遅角される前よりもトルクが大きくされる。
以上のように、本実施の形態によれば、インテークバルブ1101,1102の位相の遅角を開始した直後は第1モータジェネレータ200のトルクを小さくしてエンジン1000の出力軸を回転させ続け、インテークバルブ1101,1102の位相の遅角が最遅角の位相まで戻されると、第1モータジェネレータ200のトルクを大きくして発電される電力を大きくできる。そのため、インテークバルブ1101,1102の位相を変更するとともに、発電することができる。
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
100 ECU、200 第1モータジェネレータ、300 動力分割機構、400 第2モータジェネレータ、500 変速機、600 出力軸、700 蓄電装置、1000 エンジン、1051,1052 インジェクタ、1061,1062 点火プラグ、1090 クランクシャフト、1101,1102 インテークバルブ、1111,1112 エキゾーストバルブ、1121,1122 インテークカムシャフト、1131,1132 エキゾーストカムシャフト、2001,2002 可変バルブタイミング機構、5011,5012 カムポジションセンサ。
Claims (3)
- 吸気バルブおよび排気バルブのうちの少なくともいずれか一方のバルブの位相を変更可能なエンジンと、前記エンジンにより駆動されて発電する発電機とが設けられた車両の制御装置であって、
前記エンジンでの燃料供給が停止された後、前記バルブの位相を変更するための変更手段と、
前記エンジンでの燃料供給が停止された後、前記発電機に前記エンジンの出力軸の回転方向とは逆方向にトルクを付与させ、かつ、前記バルブの位相の変更を開始してからの変化量が大きいほど、前記発電機のトルクを増大するための制御手段とを備える、車両の制御装置。 - 前記制御手段は、前記バルブの位相が所定の位相まで変化した後の前記発電機のトルクを、前記バルブの位相が前記所定の位相まで変化する前の前記発電機のトルクよりも大きくする、請求項1に記載の車両の制御装置。
- 前記変更手段は、前記エンジンでの燃料供給が停止された後、前記バルブの位相を遅角し、
前記制御手段は、前記バルブの位相が最遅角の位相まで変化した後の前記発電機のトルクを、前記バルブの位相が前記最遅角の位相まで変化する前の前記発電機のトルクよりも大きくする、請求項1に記載の車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011120126A JP2012246860A (ja) | 2011-05-30 | 2011-05-30 | 車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011120126A JP2012246860A (ja) | 2011-05-30 | 2011-05-30 | 車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012246860A true JP2012246860A (ja) | 2012-12-13 |
Family
ID=47467535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011120126A Pending JP2012246860A (ja) | 2011-05-30 | 2011-05-30 | 車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012246860A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019244675A1 (ja) * | 2018-06-20 | 2021-07-15 | 株式会社アイシン | 弁開閉時期制御装置 |
| WO2022049869A1 (ja) * | 2020-09-02 | 2022-03-10 | 日立Astemo株式会社 | 可変バルブタイミング装置の制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007060853A1 (ja) * | 2005-11-24 | 2007-05-31 | Toyota Jidosha Kabushiki Kaisha | ハイブリッド車両 |
| JP2007154823A (ja) * | 2005-12-07 | 2007-06-21 | Toyota Motor Corp | 内燃機関の制御装置および車両 |
| JP2008057442A (ja) * | 2006-08-31 | 2008-03-13 | Toyota Motor Corp | エンジンシステム |
| JP2010132015A (ja) * | 2008-12-02 | 2010-06-17 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
-
2011
- 2011-05-30 JP JP2011120126A patent/JP2012246860A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007060853A1 (ja) * | 2005-11-24 | 2007-05-31 | Toyota Jidosha Kabushiki Kaisha | ハイブリッド車両 |
| JP2007154823A (ja) * | 2005-12-07 | 2007-06-21 | Toyota Motor Corp | 内燃機関の制御装置および車両 |
| JP2008057442A (ja) * | 2006-08-31 | 2008-03-13 | Toyota Motor Corp | エンジンシステム |
| JP2010132015A (ja) * | 2008-12-02 | 2010-06-17 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019244675A1 (ja) * | 2018-06-20 | 2021-07-15 | 株式会社アイシン | 弁開閉時期制御装置 |
| JP7444058B2 (ja) | 2018-06-20 | 2024-03-06 | 株式会社アイシン | 弁開閉時期制御装置 |
| WO2022049869A1 (ja) * | 2020-09-02 | 2022-03-10 | 日立Astemo株式会社 | 可変バルブタイミング装置の制御装置 |
| JPWO2022049869A1 (ja) * | 2020-09-02 | 2022-03-10 | ||
| CN115917129A (zh) * | 2020-09-02 | 2023-04-04 | 日立安斯泰莫株式会社 | 可变阀正时装置的控制装置 |
| JP7361221B2 (ja) | 2020-09-02 | 2023-10-13 | 日立Astemo株式会社 | 可変バルブタイミング装置の制御装置 |
| US12018622B2 (en) | 2020-09-02 | 2024-06-25 | Hitachi Astemo, Ltd. | Controller device for variable valve timing apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4306762B2 (ja) | 可変バルブタイミング機構の制御装置 | |
| JP4525698B2 (ja) | 可変バルブタイミング機構の制御装置および制御方法 | |
| JP2012219622A (ja) | 内燃機関の制御装置 | |
| JP4867687B2 (ja) | 内燃機関装置およびその制御方法並びに車両 | |
| JP2008261244A (ja) | 可変バルブタイミング機構の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| WO2007135908A1 (ja) | 車両およびその制御方法 | |
| US7661398B2 (en) | Control device and control method of internal combustion engine | |
| JP4876953B2 (ja) | 車両およびその制御方法 | |
| JP2008121498A (ja) | 内燃機関装置およびこれを備える動力出力装置並びにこれを搭載する車両、内燃機関装置の制御方法 | |
| JP2008201181A (ja) | 車両およびその制御方法 | |
| US8880322B2 (en) | Vehicle, abnormality determination method for internal combustion engine, and abnormality determination device for internal combustion engine | |
| JP2012246860A (ja) | 車両の制御装置 | |
| JP4924733B2 (ja) | 内燃機関の異常診断装置 | |
| JP2014181643A (ja) | 内燃機関の制御装置 | |
| JP2016205195A (ja) | ハイブリッド車両 | |
| JP4582108B2 (ja) | 内燃機関の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| JP5310958B2 (ja) | 車両、ならびに、内燃機関の制御方法および制御装置 | |
| JP2009257338A (ja) | 可変バルブタイミング機構の制御装置および制御方法 | |
| JP2008267200A (ja) | 車両の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| JP2012153250A (ja) | 車両の制御装置 | |
| JP4345840B2 (ja) | 車両の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| JP4968300B2 (ja) | 可変バルブタイミング機構の制御装置、制御方法、その方法を実現させるプログラムおよびそのプログラムを記録した記録媒体 | |
| JP4311414B2 (ja) | 車両およびその制御方法 | |
| WO2012176308A1 (ja) | 車両、ならびに、車両の制御方法および制御装置 | |
| JP2012056390A (ja) | エンジンの駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150217 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150623 |