JP2012247193A - Memsデバイス - Google Patents
Memsデバイス Download PDFInfo
- Publication number
- JP2012247193A JP2012247193A JP2011116516A JP2011116516A JP2012247193A JP 2012247193 A JP2012247193 A JP 2012247193A JP 2011116516 A JP2011116516 A JP 2011116516A JP 2011116516 A JP2011116516 A JP 2011116516A JP 2012247193 A JP2012247193 A JP 2012247193A
- Authority
- JP
- Japan
- Prior art keywords
- movable electrode
- silicon
- contact portion
- point
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Micromachines (AREA)
- Pressure Sensors (AREA)
Abstract
【課題】固定電極に備えたシリコン接触部と可動電極とが、それらの接触する部分において、固着を低減させるMEMSデバイスを提供する。
【解決手段】シリコン接触部14は、Rを有する凸状に形成され、可動電極5は、シリコン接触部14との対向面にR形状を有する凸部13を備える。これら、可動電極5と絶縁基板20は、シリコン接触部14および凸部13を介して接触し、シリコン接触部14と凸部13とは、それらが接触する点における法線の向きと点における離れる力の向きとが異なる。
【選択図】図3
【解決手段】シリコン接触部14は、Rを有する凸状に形成され、可動電極5は、シリコン接触部14との対向面にR形状を有する凸部13を備える。これら、可動電極5と絶縁基板20は、シリコン接触部14および凸部13を介して接触し、シリコン接触部14と凸部13とは、それらが接触する点における法線の向きと点における離れる力の向きとが異なる。
【選択図】図3
Description
本発明は、固定電極と可動電極との間の静電容量を検出することにより加速度等の物理量を検出するMEMSデバイスに関するものである。
図6に示すように、従来、半導体物理量センサ40は、物理量が加わることによって変位する可動電極41を形成するシリコン基板42と、可動電極41との対向面に固定電極43が設けられた絶縁基板44を有し、可動電極41の変位に伴う、可動電極41と固定電極43との間の静電容量の変化を検出することにより、前記物理量を検出する。また、この半導体物理量センサ10は、可動電極41の絶縁基板44との対向面に形成された凸部45と、凸部45と対向する絶縁基板44表面に形成されたシリコン薄膜電極46とを備える。これら凸部45とシリコン薄膜電極46とが接触し、ストッパの役目を果たすので、シリコン基板42と絶縁基板44とを陽極接合する際、可動電極41と固定電極43とが貼りつくことを防止することができる(特許文献1)。
しかしながら、この半導体物理量センサ40では、小型化・高感度化を図る際、可動電極41を弾性的に可動支持するビーム部のばね定数を上げると、その分復元力が弱まり、凸部45とシリコン薄膜電極46とは、面で接触するため、固着が発生するという問題あった。
本発明は、上記背景技術に鑑みて発明されたもので、その課題は、固定電極に備えたシリコン接触部と可動電極とが、それらの接触する部分において、固着することを低減させるMEMSデバイスを提供することである。
上記課題を解決するために、本発明のMEMSデバイスは、物理量が加わることによって変位する可動電極と前記可動電極との対向面に固定電極が設けられた絶縁基板とを有し、前記絶縁基板は、前記可動電極との対向面に前記固定電極とは別にシリコン接触部を備え、前記可動電極と前記絶縁基板は、前記シリコン接触部を介して接触し、前記可動電極と前記固定電極との間の静電容量の変化を検出することにより前記物理量を検出するMEMSデバイスであって、前記シリコン接触部は、Rを有する凸状に形成され、前記シリコン接触部と前記可動電極とは、それらが接触する点における法線の向きαと前記点における離れる力の向きβとが異なることを特徴とするMEMSデバイス。
また、このMEMSデバイスにおいて、前記可動電極は、前記シリコン接触部との対向面にR形状を有する凸部を備え、前記可動電極と前記絶縁基板は、前記シリコン接触部および前記凸部を介して接触し、前記シリコン接触部と前記凸部とは、それらが接触する点における法線の向きαと前記点における離れる力の向きβとが異なることが好ましい。
また、このMEMSデバイスにおいて、前記可動電極は、前記シリコン接触部との対向面に穴を備え、前記穴の開口部における内周壁面は、Rを有し、前記可動電極と前記絶縁基板は、前記シリコン接触部および前記内周壁面を介して接触し、前記シリコン接触部と前記内周壁面とは、それらが接触する点における法線の向きαと前記点における離れる力の向きβとが異なることが好ましい。
本発明のMEMSデバイスにおいて、シリコン接触部は、Rを有する凸状に形成され、
シリコン接触部と可動電極とは、それらが接触する点における法線の向きαと前記点における離れる力の向きβとが異なる。これより、シリコン接触部と可動電極とは、点で接触し、それらが離間する際、可動電極が離れる力の向きβが前記点に局所集中できるため、固着を低減することができる。
シリコン接触部と可動電極とは、それらが接触する点における法線の向きαと前記点における離れる力の向きβとが異なる。これより、シリコン接触部と可動電極とは、点で接触し、それらが離間する際、可動電極が離れる力の向きβが前記点に局所集中できるため、固着を低減することができる。
(実施形態1)
図1ないし4は、本発明の実施形態1であるMEMSデバイス1を示す。このMEMSデバイス1は、物理量が加わることによって変位する可動電極5と可動電極5との対向面に固定電極6が設けられた絶縁基板20とを有し、絶縁基板20は、可動電極5との対向面に固定電極6とは別にシリコン接触部14を備え、可動電極5と絶縁基板20は、シリコン接触部14を介して接触し、可動電極5と固定電極6との間の静電容量の変化を検出することにより前記物理量を検出するMEMSデバイス1である。また、シリコン接触部14は、Rを有する凸状に形成され、可動電極5は、シリコン接触部14との対向面にR形状を有する凸部13を備える。これら、可動電極5と絶縁基板20は、シリコン接触部14および凸部13を介して接触し、シリコン接触部14と凸部13とは、それらが接触する点9における法線の向きαと点9における離れる力の向きβとが異なる。
図1ないし4は、本発明の実施形態1であるMEMSデバイス1を示す。このMEMSデバイス1は、物理量が加わることによって変位する可動電極5と可動電極5との対向面に固定電極6が設けられた絶縁基板20とを有し、絶縁基板20は、可動電極5との対向面に固定電極6とは別にシリコン接触部14を備え、可動電極5と絶縁基板20は、シリコン接触部14を介して接触し、可動電極5と固定電極6との間の静電容量の変化を検出することにより前記物理量を検出するMEMSデバイス1である。また、シリコン接触部14は、Rを有する凸状に形成され、可動電極5は、シリコン接触部14との対向面にR形状を有する凸部13を備える。これら、可動電極5と絶縁基板20は、シリコン接触部14および凸部13を介して接触し、シリコン接触部14と凸部13とは、それらが接触する点9における法線の向きαと点9における離れる力の向きβとが異なる。
以下、この実施形態を具体的詳細に説明する。
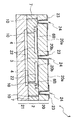
図2、3に示すように、本発明の実施形態1となるMEMSデバイス1は、可動電極5を形成するシリコン基板2の表裏両面に陽極接合によってガラス基板等の絶縁基板20,21を接合することで形成され、図1に示す紙面に向かって垂直な方向(Z方向)の加速度や角速度等の物理量を検出することができる。シリコン基板2には、図1ないし3に示すように、半導体プロセスにより間隙10が形成されることで、アンカー部3、ビーム部4、可動電極5、フレーム部7、および電位取出部8が形成されている。図2、3に示すように、シリコン基板2と絶縁基板20,21との接合面には、比較的浅い凹部22が形成されており、シリコン基板2各部の絶縁性や可動電極5の動作性の確保が図られている。
図2に示すように、絶縁基板20の表面20aには、導体層23が成膜されており、シリコン基板2の各部の電位を取得するための電極として用いられる。本実施形態では、絶縁基板20にサンドブラスト加工等によって貫通孔24を形成し、シリコン基板2の表面(絶縁基板20側の表面)の一部を露出させる。そして、絶縁基板20の表面上から貫通孔24の内周面上およびシリコン基板2の表面上にかけて電気的に接続された一連の導体層23を成膜し、導体層23からシリコン基板2内の各部の電位を検出できるようにしてある。
図1に示すように、シリコン基板2は、全体として平面視において、略長方形状に形成されており、フレーム部7が、シリコン基板2の四つの周縁(四辺)に沿って略一定幅で枠状に設けられている。間隙10は、反応性イオンエッチング(RIE : Reactive Ion Etching)により垂直エッチング加工をすることで、間隙10の側壁面をシリコン基板2の表面と垂直になるように形成される。このようにして、垂直エッチング加工により形成された間隙10の側壁面同士は、互いに略並行に対向することになる。反応性イオンエッチングとしては、例えば、誘導結合型プラズマ(ICP : Inductively Coupled Plasma)を備えたエッチング装置によるICP加工を利用することができる。
フレーム部7の内側には、シリコン基板2の平面視略中央位置よりフレーム部7の一長辺側(図1の上側)にわずかにずれた位置に、矩形断面を有する柱状のアンカー部3が設けられている。このアンカー部3のフレーム部7の短辺に対向する一対の側壁からビーム部4,4がそれぞれフレーム部7の長辺と略並行に延伸している。ビーム部4は、一定の断面でフレーム部7の長辺に沿う方向に延伸し、一方の端部4aは、アンカー部3に接続されており、他方の端部4bは、可動電極5に接続されている。
図1に示すように、可動電極5は、アンカー部3およびビーム部4,4に対して、フレーム部7の一長辺側(図1の下側)には、間隙10を空けて略矩形状の大板部5aを備えている。また、フレーム部7の他の長辺側(図1の上側)には、間隙10を空けて略矩形状の小板部5bを備えている。これら大板部5aと小板部5bとが、フレーム部7の短辺に沿う一対の接続部5c,5cを介して相互に接続された形状となっている。そして、ビーム部4,4は、それぞれ対応する接続部5c,5cの略中央部に接続されている。大板部5aおよび小板部5bは、一枚の単結晶シリコン基板から形成されているため、小板部5bよりサイズの大きい大板部5aは、質量が大きくなっている。このように可動電極5が、MEMSデバイス1の固定部としてのアンカー部3にビーム部4,4を介して非対称な質量バランスで可動支持された構造は、シリコン基板2に間隙10を形成し、シリコン基板2および絶縁基板20,21のうち少なくともいずれか一方に凹部22を形成することで得ることができる。したがって、アンカー部3、ビーム部4,4、および可動電極5は、シリコン基板2の一部として一体に構成されており、それらアンカー部3、ビーム部4,4、および可動電極5の電位はほぼ等電位とみなすことできる。
ビーム部4,4は、フレーム部7に対して可動電極5を弾性的に可動支持するバネ要素として機能する。本実施形態では、ビーム部4,4は、MEMSデバイス1の厚み方向に長い断面(ビーム部4の延伸軸に垂直な断面)を有しているため、厚み方向には撓みにくい。また、可動電極5は、ビーム部4,4を挟んで相互に対向する質量の異なる大板部5aと小板部5bとを備えているため、MEMSデバイス1に厚み方向の加速度が生じると、大板部5aおよび小板部5bに作用する慣性力の差によるビーム部4,4のねじりにより、ビーム部4,4を中心として揺動することになる。すなわち、本実施形態では、ビーム部4,4は、ねじりビーム(トーションビーム)として機能することになる。そして、本実施形態では、可動電極5の大板部5aおよび小板部5bのそれぞれに対向するように絶縁基板20の下面20bに固定電極6A、6Bを設けている。大板部5aと固定電極6Aとの間の静電容量、および小板部5bと固定電極6Bとの間の静電容量を検出することで、MEMSデバイス1のアンカー部3に対する可動電極5の揺動姿勢の変化を得ることができる。固定電極6は、絶縁基板20の下面20b上に導体層(例えばアルミニウム合金の層)として形成してある。
このMEMSデバイス1において、可動電極5が揺動することなく絶縁基板20の下面20bに対して平行な姿勢にある状態では、大板部5aと固定電極6Aとの間の大きさと、小板部5bと固定電極6Bとの間の大きさとが等しくなる。そのため、大板部5aおよび固定電極6Aの相互対向面積と、小板部5bおよび固定電極6Bの相互対向面積とを等しくしてある場合には、大板部5aと固定電極6Aとの間の静電容量と、小板部5bと固定電極6Bとの間の静電容量とは等しくなる。一方、可動電極5が揺動して絶縁基板20の下面20bに対して傾き、大板部5aが固定電極6Aから離れると共に小板部5bが固定電極6Bに近接した状態では、可動電極5が揺動することなく絶縁基板20の下面20bに対して平行な姿勢にある状態に比べて、大板部5aと固定電極6Aとの間は大きくなり、小板部5bと固定電極6Bとの間は小さくなる。そのため、大板部5aと固定電極6Aとの間の静電容量は小さくなり、小板部5bと固定電極6Bとの間の静電容量は大きくなる。同様に、可動電極5が揺動して絶縁基板20の下面20bに対して傾き、大板部5aが固定電極6Aに近接すると共に小板部5bが固定電極6Bから離間した状態では、可動電極5が揺動することなく絶縁基板20の下面20bに対して平行な姿勢にある状態に比べて、大板部5aと固定電極6Aとの間は小さくなり、小板部5bと固定電極6Bとの間は大きくなる。そのため、大板部5aと固定電極6Aとの間の静電容量は大きくなり、小板部5bと固定電極6Bとの間の静電容量は小さくなる。
したがって、大板部5aと固定電極6Aとの間を検知ギャップとする静電容量と、小板部5bと固定電極6Bとの間を検知ギャップとする静電容量と、の差動出力から、C−V変換することで得られる電圧波形を求めMEMSデバイス1に加えられた種々の物理量を検出することができる。このような物理量は、可動電極5および固定電極6A,6Bの電位から取得することができる。本実施形態では、図1、2に示すように、アンカー部3上の絶縁基板20には貫通孔24が形成されており、可動電極5の電位は、この貫通孔24の内面に形成した導体層23を介して取り出される。
図4(a)は、シリコン接触部14と凸部13との離間時を、図4(b)は、接触時を示している。図4(a)に示すように、本実施形態では、可動電極5の大板部5aの表面上の適宜位置にはシリコン基板2を二段エッチングすることにより、Rを有する形状の凸部13が形成されている。また、絶縁基板20の下面20bの凸部13に対向する位置には、スパッタリング法によりシリコンを成膜し、エッチングすることにより、シリコン接触部14が形成されている。また、このシリコン接触部14は、Rを有する形状に形成されている。また、図4(b)に示すように、凸部13は、点9において、シリコン接触部14で接触する。また、この凸部13とシリコン接触部14とは、点9において、その頂点がずれるように対向して形成されていて、それらが接触する点9における法線の向きαと点9における離れる力の向きβとが異なる。このような構成によれば、可動電極5の凸部13と絶縁基板20に備えるシリコン接触部14とは、点9で接触することで対向面積を小さくし、固着を低減することができる。また、凸部13とシリコン接触部14とが接触する点9における法線の向きαと点9における離れる力の向きβとが異なるので、凸部13とシリコン接触部14とが離間する際、可動電極5の凸部13がシリコン接触部14から離れる力の向きβを点9に局所集中でき、さらに固着を低減することができる。これより、凸部13とシリコン接触部14とは、陽極接合時の接触や、ビーム部4の揺動による接触において、可動電極5と固定電極6とが貼りつくことを防止できる。
(実施形態2)
上記実施形態1と重複する構成についての、詳しい説明は省略する。また、実施形態1の符号を付したものは、同様のものであるため、説明を省略する。
上記実施形態1と重複する構成についての、詳しい説明は省略する。また、実施形態1の符号を付したものは、同様のものであるため、説明を省略する。
図5(a)、(b)に示すように、本実施形態のMEMSデバイス1において、可動電極5は、シリコン接触部14との対向面に穴25を備え、穴25の開口部における内周壁面26は、Rを有する。可動電極5と絶縁基板20は、シリコン接触部14および内周壁面26を介して接触し、シリコン接触部14と内周壁面26とは、それらが接触する点9における法線の向きαと点9における離れる力の向きβとが異なる。
以下、具体的詳細に説明する。
図5(a)に示すように、絶縁基板20の下面20bには、スパッタリング法によりシリコンを成膜し、エッチングすることにより、シリコン接触部14が形成されている。また、このシリコン接触部14は、Rを有する形状に形成されている。可動電極5の大板部5aの表面には、シリコン接触部14に対向する位置に、穴25を有していて、この穴25の開口部における内周壁面26は、Rを有している。穴25は、テーパー状に形成され、対向するシリコン接触部14から離れるにつれて、その内周が小さくなるように形成されている。また、図5(b)に示すように、この内周壁面26は、点9において、シリコン接触部14と接触する。また、この内周壁面26とシリコン接触部14とは、点9において、その頂点がずれるように対向して形成されていて、それらが接触する点9における法線の向きαと点9における離れる力の向きβとが異なる。このような構成によれば、可動電極5の内周壁面26と絶縁基板20に備えるシリコン接触部14とは、点9で接触することで対向面積を小さくし、固着を低減することができる。また、内周壁面26とシリコン接触部14とが接触する、点9における法線の向きαと点9における離れる力の向きβとが異なるので、内周壁面26とシリコン接触部14とが離間する際、可動電極5の内周壁面26がシリコン接触部14から離れる力の向きβを点9に局所集中でき、さらに固着を低減することができる。これより、シリコン接触部と内周壁面26とは、陽極接合時の接触や、ビーム部4の揺動による接触において、可動電極5と固定電極6とが貼りつくことを防止できる。また、穴25を形成する構造は、内周壁面26とシリコン接触部14とが、点9で接触するような構造を形成しやすい。また、内周壁面26は、Rを有する曲面に限らす、平面であっても構わない。
なお、上記に述べたMEMSデバイス1は、静電容量式加速度センサとしても用いられる。
1 MEMSデバイス
2 シリコン基板
5 可動電極(大板部5a,小板部5b)
6 固定電極(6A,6B)
7 フレーム部
10 間隙
13 凸部
14 シリコン接触部
20,21 絶縁基板
25 穴
26 内周壁面
2 シリコン基板
5 可動電極(大板部5a,小板部5b)
6 固定電極(6A,6B)
7 フレーム部
10 間隙
13 凸部
14 シリコン接触部
20,21 絶縁基板
25 穴
26 内周壁面
Claims (3)
- 物理量が加わることによって変位する可動電極と前記可動電極との対向面に固定電極が設けられた絶縁基板とを有し、
前記絶縁基板は、前記可動電極との対向面に前記固定電極とは別にシリコン接触部を備え、
前記可動電極と前記絶縁基板は、前記シリコン接触部を介して接触し、
前記可動電極と前記固定電極との間の静電容量の変化を検出することにより前記物理量を検出するMEMSデバイスであって、
前記シリコン接触部は、Rを有する凸状に形成され、
前記シリコン接触部と前記可動電極とは、それらが接触する点における法線の向きと前記点における離れる力の向きとが異なることを特徴とするMEMSデバイス。 - 前記可動電極は、前記シリコン接触部との対向面にR形状を有する凸部を備え、
前記可動電極と前記絶縁基板は、前記シリコン接触部および前記凸部を介して接触し、
前記シリコン接触部と前記凸部とは、それらが接触する点における法線の向きと前記点における離れる力の向きとが異なることを特徴とする請求項1に記載のMEMSデバイス。 - 前記可動電極は、前記シリコン接触部との対向面に穴を備え、
前記穴の開口部における内周壁面は、Rを有し、
前記可動電極と前記絶縁基板は、前記シリコン接触部および前記内周壁面を介して接触し、
前記シリコン接触部と前記内周壁面とは、それらが接触する点における法線の向きと前記点における離れる力の向きとが異なることを特徴とする請求項1に記載のMEMSデバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116516A JP2012247193A (ja) | 2011-05-25 | 2011-05-25 | Memsデバイス |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116516A JP2012247193A (ja) | 2011-05-25 | 2011-05-25 | Memsデバイス |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012247193A true JP2012247193A (ja) | 2012-12-13 |
Family
ID=47467788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011116516A Withdrawn JP2012247193A (ja) | 2011-05-25 | 2011-05-25 | Memsデバイス |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012247193A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106458567A (zh) * | 2014-06-05 | 2017-02-22 | 株式会社村田制作所 | Mems器件 |
| WO2024241696A1 (ja) * | 2023-05-25 | 2024-11-28 | 株式会社村田製作所 | 静電容量式センサとその製造方法 |
-
2011
- 2011-05-25 JP JP2011116516A patent/JP2012247193A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106458567A (zh) * | 2014-06-05 | 2017-02-22 | 株式会社村田制作所 | Mems器件 |
| CN109455663A (zh) * | 2014-06-05 | 2019-03-12 | 株式会社村田制作所 | Mems器件 |
| US10287159B2 (en) | 2014-06-05 | 2019-05-14 | Murata Manufacturing Co., Ltd. | MEMS device |
| CN109455663B (zh) * | 2014-06-05 | 2023-12-12 | 株式会社村田制作所 | Mems器件 |
| WO2024241696A1 (ja) * | 2023-05-25 | 2024-11-28 | 株式会社村田製作所 | 静電容量式センサとその製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI417547B (zh) | Capacitive sensor | |
| US11105829B2 (en) | MEMS accelerometer | |
| JP6295435B2 (ja) | Memsデバイス | |
| WO2016119418A1 (zh) | 一种加速度计中的z轴结构 | |
| JP2007298405A (ja) | 静電容量式センサ | |
| US8850889B2 (en) | Acceleration sensor | |
| JP2013181884A (ja) | 静電容量式センサ | |
| JP5426906B2 (ja) | 加速度センサ | |
| JP4605087B2 (ja) | 静電容量式センサ | |
| JP2012247193A (ja) | Memsデバイス | |
| JP2013217844A (ja) | Memsデバイス | |
| JP4965546B2 (ja) | 加速度センサ | |
| JP4775412B2 (ja) | 半導体物理量センサ | |
| JP4752874B2 (ja) | 半導体物理量センサ | |
| JP2009222475A (ja) | 複合センサ | |
| JP4965547B2 (ja) | 加速度センサ | |
| JP2013024765A (ja) | 静電容量式センサ | |
| JP2013228243A (ja) | 静電容量式センサ | |
| JP2010190703A (ja) | 半導体物理量センサ | |
| JP2012008022A (ja) | 加速度センサ | |
| JP4692373B2 (ja) | 静電容量式センサ | |
| JP2010190699A (ja) | 静電容量式センサ | |
| JP2013186061A (ja) | 静電容量式センサ | |
| JP2014021188A (ja) | 回転型アクチュエータ | |
| JP5783201B2 (ja) | 容量式物理量センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |