JP2012249082A - 撮像装置 - Google Patents
撮像装置 Download PDFInfo
- Publication number
- JP2012249082A JP2012249082A JP2011119251A JP2011119251A JP2012249082A JP 2012249082 A JP2012249082 A JP 2012249082A JP 2011119251 A JP2011119251 A JP 2011119251A JP 2011119251 A JP2011119251 A JP 2011119251A JP 2012249082 A JP2012249082 A JP 2012249082A
- Authority
- JP
- Japan
- Prior art keywords
- pan
- dome
- unit
- lens unit
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Landscapes
- Studio Devices (AREA)
Abstract
【課題】 ドームを有する撮像装置の視界が妨害行為により遮られた場合でも、視界を遮られた状態から被写体を撮像し得る状態に自動的に復帰することができ、且つ、コストの面で有利な撮像装置を提供する。
【解決手段】 監視カメラ1は、被写体を撮像して撮像画像データを生成するレンズユニット105と、半球形状に形成され、レンズユニット105を覆うドーム101と、レンズユニット105をパン方向に回転させることができる駆動ユニット200と、駆動ユニット200によるレンズユニット105の回転を制御し、レンズユニット105により生成された撮像画像データに基づいて異常を検知する制御部301と、を有し、駆動ユニット200は、ドーム101もパン方向に回転させることができ、制御部301は、異常を検知した場合に、ドーム101を回転させるように駆動ユニット200を制御する。
【選択図】 図6
【解決手段】 監視カメラ1は、被写体を撮像して撮像画像データを生成するレンズユニット105と、半球形状に形成され、レンズユニット105を覆うドーム101と、レンズユニット105をパン方向に回転させることができる駆動ユニット200と、駆動ユニット200によるレンズユニット105の回転を制御し、レンズユニット105により生成された撮像画像データに基づいて異常を検知する制御部301と、を有し、駆動ユニット200は、ドーム101もパン方向に回転させることができ、制御部301は、異常を検知した場合に、ドーム101を回転させるように駆動ユニット200を制御する。
【選択図】 図6
Description
本発明は、ドームを有する撮像装置であって、より詳細には、当該撮像装置の視界が遮られたことを検知可能な撮像装置に関する。
近年、監視カメラへのイタズラによる監視妨害が監視業界の課題となっている。イタズラによる監視妨害としては、例えば、監視カメラのレンズまたはドームに対し、スプレーを噴霧することやガムテープを貼り付けることなどがある。このような監視妨害により、捉えるべき被写体を撮像することができなくなってしまうことは、監視カメラにとっては致命的な損失である。
そこで、特許文献1には、映像信号の周波数成分に基づいてカメラの視野が遮られたか否かを検知し、視野が遮られた場合には、ベルやサイレンなどで構成された威嚇装置を起動するためのアラーム信号を出力する監視カメラシステムが開示されている。
また、特許文献2には、撮像画像から抽出されたエッジの数が減少したことに基づき、ガムテープなどのマスクがレンズの前に貼り付けられたか否かを判定する監視カメラ装置が開示されている。これは、撮像画像が監視領域を撮像したものであれば、撮像画像には種々のものが写っているために多くのエッジが抽出されるが、レンズの前にマスクが貼り付けられると撮像画像はのっぺりしたものとなり、エッジの数が減少することを利用したものである。
さらに、特許文献3には、パン方向に回転可能なカメラと、このカメラを覆い、パン方向に回転可能に設けられたドームカバーと、を有するドームカメラ装置が開示されている。
しかしながら、上述の特許文献1および特許文献2に開示の技術では、監視者への通知は可能なものの、監視妨害行為がなされた監視カメラの復旧作業は監視者にとって煩雑であった。さらに、煩雑な復旧作業には時間を要するため、監視カメラで監視することができない期間が長くなってしまうこともあった。その上、これら文献では、レンズユニットを覆うドームを備えるカメラについて考慮されていなかった。
また、上述の特許文献3では、監視妨害行為によりカメラの視界が遮られてしまう点について考慮されていなかった。さらに、特許文献3に開示の技術では、ドームカバーをパン方向に回転させるドーム駆動モーターが、カメラをパン方向に回転させるパンモーターと独立して設けられており、コストの面で不利であった。
本発明は上記のような点に鑑みてなされたものであり、ドームを有する撮像装置の視界が遮られた場合でも、視界を遮られた状態から被写体を撮像し得る状態に自動的に復帰することができ、且つ、コストの面で有利な撮像装置を提供するものである。
上記目的を達成するために、本発明の撮像装置は、被写体を撮像して撮像画像データを生成するレンズユニットと、半球形状に形成され、前記レンズユニットを覆うドームと、前記レンズユニットをパン方向に回転させることができるパン回転手段と、前記パン回転手段による前記レンズユニットの回転を制御する制御手段と、前記レンズユニットにより生成された撮像画像データに基づいて異常を検知する検知手段と、を有する撮像装置であって、前記パン回転手段は、前記ドームもパン方向に回転させることができ、前記制御手段は、前記検知手段により異常が検知された場合に、前記ドームを回転させるように前記パン回転手段を制御する。
本発明によれば、ドームを有する撮像装置の視界が遮られた場合でも、視界を遮られた状態から被写体を撮像し得る状態に自動的に復帰することができ、且つ、コストの面で有利な撮像装置を提供することができる。
以下、添付図面を参照して、撮像装置としての監視カメラに本発明を適用した場合の実施形態について詳説する。
図1は、本発明を適用した監視カメラ1の外観図である。ここで、図1(a)は、監視カメラ1の正面図であり、図1(b)は、監視カメラ1の側面図である。なお、図1では、後述するレンズユニット105などを透過的に示している。図1における監視カメラ1は、上カバー103と、下カバー102と、レンズユニット105の前面に配設された、透明なドーム101と、から構成される。
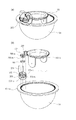
続いて、図2は、本実施形態の監視カメラ1の分解斜視図である。半球形状に形成されたドーム101は、下カバー102と保持部材104との間で回転可能になるよう、下カバー102と保持部材104とによって挟まれて保持される。そして、保持部材104は、下カバー102との間にドーム101を挟み込んだ状態で、螺子などの締結手段(不図示)により、下カバー102に対して固定される。
ドーム101に覆われるパンベース106は、パン方向に回転可能に上カバー103に配設される。また、パンベース106の両端には、一対のアーム部106‐aが形成されており、レンズユニット105は、これらアーム部106‐aにより、チルト方向に回転可能に軸支される。換言すると、パンベース106は、レンズユニット105をチルト回転可能に支持する。
このレンズユニット105は、ドーム101に覆われ、撮像光学系とCMOSなどの撮像素子とを保持する。そして、パンベース106は、不図示のプリント基板上に具備されたドライバからの信号に基づいて動作する駆動ユニット200により、回転制御される。
続いて、図3は、ドーム機構部としての駆動ユニット200近傍を説明するための図である。ここで、図3(a)は、駆動ユニット200近傍を示す斜視図であり、図3(b)は、駆動ユニット200の構成を示す分解斜視図である。なお、図3(b)におけるパン軸Lは、ドーム101およびパンベース106のパン方向の回転軸を示すものである。
図3(a)に示すように、駆動ユニット200は、ドーム101とパンベース106との間に設けられており、本実施形態におけるパン回転手段に相当する。
駆動源としてのパン駆動手段201は、レンズユニット105をパン方向に回転させることができるステッピングモーターである。
ピニオンギヤ202は、パン駆動手段201に接続されており、段付き平歯ギヤ203の第一の平歯部203−bと噛み合う。つまり、ピニオンギヤ202は、第一の平歯部203−bと駆動連結されている。さらに、段付き平歯ギヤ203の第二の平歯部203−aは、ドーム101のフランジの内周部に形成された平歯部101−a(平歯ギヤ)と噛み合う。
付勢部材204は、略C字状に形成された金属部材である。この付勢部材204は、その開口部がクラッチギヤ205の凸部205−bに係合することにより、クラッチギヤ205と一体となって回動する。なお、付勢部材204およびクラッチギヤ205は、本実施形態におけるクラッチ機構に相当する。
また、段付き平歯ギヤ203には、凸部205−bを含めたクラッチギヤ205と付勢部材204とを収納する凹部が設けられており、この凹部に収納された付勢部材204は、段付き平歯ギヤ203の凹部側面203‐cを常に付勢する。より詳細には、付勢部材204は、クラッチギヤ205の凸部205−bとは逆側の位置で、段付き平歯ギヤの凹部側面203−cを付勢する。
クラッチギヤ205は、隣接するアイドラーギヤ206と噛み合う平歯部205−aと、ギヤ歯面を持たない(ギヤが形成されていない)略円柱面およびこの円柱面から僅かに突出した凸部205−bと、から成る。
アイドラーギヤ206は、パンベース106の下端部の外周に形成された平歯部106−b(平歯ギヤ)と駆動連結されており、段付き平歯ギヤ203、クラッチギヤ205と共に不図示の部材により軸支されている。
続いて、図4は、駆動ユニット200を構成するギヤなどを説明するための図である。ここで、図4(a)は、駆動ユニット200近傍の側面図であり、図4(b)は、図4(a)のA−A断面図である。
図4に示すように、パン駆動手段201によりピニオンギヤ202がC方向に回転させられると、ピニオンギヤ202と駆動連結されている段付き平歯ギヤ203‐bは、CC方向に回転する。この時、付勢部材204により付勢される段付き平歯ギヤ203の力点には、パン駆動手段201による伝達力Fが付勢部材204の接線方向に作用する。
この伝達力Fが段付き平歯ギヤ203の力点における最大摩擦力μN(μ:静止摩擦係数、N:付勢部材204による付勢力)を超えると、付勢部材204が段付き平歯ギヤ203に対しスリップする。この時、クラッチギヤ205は回転せず、段付き平歯ギヤ203のみが回転することになるので、最終的に、段付き平歯ギヤ203‐aと平歯部101−aで噛み合うドーム101のみがCC方向に回転することになる。
これにより、後述する制御部301がスプレー噴霧等のイタズラにより捉えるべき被写体を撮像できないと判断した場合に、パン駆動手段201を低速駆動することで、パンベース106を回動させることなく、ドーム101のみを回動させることができる。つまり、パン駆動手段201の駆動速度が低速の場合に、パン駆動手段201からの駆動力を、平歯部106−bに伝達することなく、平歯部101−aに伝達することができる。
また、パン駆動手段201の駆動電圧を上げて伝達力Fを上げることでも同様に、パンベース106を回動させることなく、ドーム101のみを回動させることができる。
一方、伝達力Fが段付き平歯ギヤの力点における最大摩擦力μN以下である場合、クラッチギヤ205は、段付き平歯ギヤ203と一体となって回動するので、パンベース106およびドーム101は共にCC方向に回転する。さらに、本実施例では、パンベース106の回転速度とドーム101の回転速度とが同一となるように各ギヤの減速比を設定している。
例えば、本実施形態の監視カメラ1では、ドーム101の一部にスプレーが噴霧されたことにより監視カメラ1の視界が遮られたので、監視カメラ1の視界を確保するために、パンベース106に対してドーム101のみを回転させたという状況が発生し得る。このような状況でユーザからパン回転を指示されても、監視カメラ1は、ドーム101とパンベース106とを同一方向且つ同一速度で回転させることができる。このため、スプレーが噴霧されたドーム101の一部により監視カメラ1の視界が再び遮られることを防止し得る。
続いて、図5は、監視カメラ1に対するスプレー噴霧などの異常を検知してドーム101の回転を制御するための構成を示すブロック図である。
図5におけるレンズユニット105は、後述の制御部301の指示を受け、被写体を撮像して撮像画像データを生成し、生成した撮像画像データを制御部301に出力する。
パン駆動手段201は、制御部301の指示に従って、ドーム101およびレンズユニット105の両方、または、ドーム101のみをパン方向に回転させる。
制御部301は、CPUなどで構成されており、監視カメラ1の各部を統括的に制御する。まず、制御部301は、レンズユニット105から不図示の伝送ケーブルを介して入力された撮像画像データをメモリ302に出力し、初期画像データとして格納させる。
なお、本実施形態における初期画像データは、レンズユニット105がユーザによってそれぞれ設定されたパン角度およびチルト角度にて被写体を撮像して出力した撮像画像データであり、その画像は鮮明なものであるものとする。
次に、制御部301は、レンズユニット105で撮像された最新の撮像画像データとそれより過去に撮像された初期画像データとを用い、最新の撮像画像データの異常を検知する。なお、本実施形態における最新の撮像画像データは、初期画像データが撮像された方向と同じ撮像方向で、レンズユニット105により撮像されて生成されたものである。換言すれば、本実施形態における最新の撮像画像データは、レンズユニット105が初期画像データと同じ位置を撮像して生成するものとする。
そして、制御部301は、最新の撮像画像データの異常を検知した場合には、ドーム101のみをパン方向に所定角度回転させるようにパン駆動手段201を制御し、メモリ302に格納されている異常検知フラグの値をONに設定する。このようなドーム回転制御処理については、図6を用いて後述する。
さらに、制御部301は、例えば、ネットワークを介して接続された外部のカメラ制御装置から、パン回転を指示されたか否かを判定する。そして、制御部301は、パン回転を指示されたと判定した場合には、ドーム101およびレンズユニット105の両方をパン方向に回転させる。このようなパン回転制御処理については、図7を用いて後述する。
記憶部としてのメモリ302は、RAMなどで構成されており、制御部301から撮像画像データを入力され、入力された撮像画像データを初期画像データとして格納する。また、メモリ302は、監視カメラ1に異常が検知されたか否かを示す異常検知情報としての異常検知フラグを格納する。なお、この異常検知フラグの初期値はOFFであるものとする。
続いて、図6を参照しながら、監視カメラ1に対するスプレー噴霧などの異常を検知したか否かを検知してドーム101をパン方向に回転させるためのドーム回転制御処理について説明する。なお、このドーム回転制御処理は、制御部301によって実行される。
図6におけるステップS101では、制御部301は、レンズユニット105から入力された撮像画像データを初期画像データとしてメモリ302に格納する。
ステップS102では、制御部301は、ステップS101でメモリ302に格納された初期画像データとレンズユニット105で撮像された最新の撮像画像データとを比較し、この最新の撮像画像の異常を検知する。ここで、本実施形態における制御部301は、撮像画像の輝度変化量を示すエッジ強度を用いて最新の撮像画像の異常を検知する。
具体的には、まず、制御部301は、ステップS101でメモリ302に格納した初期画像データおよびレンズユニット105で撮像された最新の撮像画像データにつき、それぞれの画像のエッジ強度を算出する。そして、最新の撮像画像データから得られたエッジ強度が、初期画像データから得られたエッジ強度を所定の閾値よりも下回っている場合には、制御部301は、最新の撮像画像データの異常を検知し、下回っていない場合には、当該画像データの異常を検知しない。
ここで、画像のエッジ強度は、例えば、画像のX方向(画像の左右方向)のエッジ強度と画像のY方向(画像の上下方向)のエッジ強度をそれぞれ算出し、算出された各エッジ強度の絶対値を加算することで算出できる。
そして、最新の撮像画像の異常を制御部301が検知した場合には、ステップS103に進み、最新の撮像画像の異常を制御部301が検知しない場合には、ステップS102に戻る。
ステップS103では、制御部301は、所定時間(例えば、3秒間)が経過した後に、ドーム101をパン方向に所定角度回転させるように、パン駆動手段201を制御する。
ステップS104では、制御部301は、メモリ302に格納されている異常検知フラグの値をONに設定する。
続いて、図7を参照しながら、ユーザからのパン回転指示に応じ、ドーム101およびレンズユニット105の両方をパン方向に回転させるためのパン回転制御処理について説明する。なお、このパン回転制御処理は、制御部301によって実行される。
図7におけるステップS201では、制御部301は、パン回転が指示されたか否かを判定する。パン回転が指示されたと制御部301が判定した場合には、ステップS202に進み、パン回転が指示されていないと制御部301が判定した場合には、ステップS201に戻る。
ステップS202では、制御部301は、ドーム101およびレンズユニット105の両方をパン方向に所定角度回転させるように、パン駆動手段201を制御する。より詳細には、制御部301は、ドーム101およびレンズユニット105を同一方向且つ同一速度でパン方向に回転させるように、パン駆動手段201を制御する。
続いて、図8は、ドーム101の一部にスプレーが噴霧された際の、ドーム101の回転動作を説明するための概要図である。ここで、図8(a)は、監視カメラ1が天井面に設置された場合の概要図であり、図8(b)は、監視カメラ1が壁面に設置された場合の概要図である。さらに、図8(c)は、強い外部光源(特に、監視カメラ1が屋外に設置された際の日光)による画質劣化を防止するためのカバー部材401を備えた監視カメラ1が壁面に設置された場合の概要図である。
なお、図8(a)および図8(b)では、レンズユニット105などを透過的に示している。また、図8(c)では、ドーム101を透過的に示している。
図8(a)および図8(b)に示すように、監視カメラ1は、撮像画像に異常を検知すると、適正な撮像画像(つまり、異常が検知されない撮像画像)を撮像できる位置まで、ドーム101をパン方向(破線の矢印で示す方向)に回転させることができる。
また、図8(c)に示す形態の監視カメラ1によれば、カバー部材401に覆われているドーム101の略半分は、イタズラ、埃、ゴミなどの影響を物理的に受け難く、更なるユーザメリットが期待できる。このような監視カメラ1では、
具体的には、図6のステップS103で、カバー部材401に隠されていたドーム101の一部がカバー部材401から完全に現れる位置まで、ドーム101をパン方向に回転させるよう、制御部301がパン駆動手段201を制御するように構成しても良い。
具体的には、図6のステップS103で、カバー部材401に隠されていたドーム101の一部がカバー部材401から完全に現れる位置まで、ドーム101をパン方向に回転させるよう、制御部301がパン駆動手段201を制御するように構成しても良い。
以上のように本実施形態の監視カメラ1では、制御部301は、撮像画像の異常を検知した場合に、ドーム101をパン方向に所定角度回転させるようにパン駆動手段201を制御する。これにより、監視カメラ1は、ドーム101の一部にスプレーが噴霧されたことなどにより監視カメラ1の視界が遮られた場合でも、視界を遮られた状態から監視対象を撮像することができる状態に自動的に復帰し得る。
なおかつ、本実施形態の監視カメラ1では、パン駆動手段201は、ドーム101をパン方向に回転させる機能およびレンズユニット105をパン方向に回転させる機能を兼用しているので、コストの面で有利である。
また、本実施形態の監視カメラ1では、駆動ユニット200がドーム101とパンベース106との間に設けられているので、スペースを有効活用でき、監視カメラ1の大型化を抑制することができる。
なお、本実施形態では、ステップS103で、ドーム101を所定の角度だけパン方向に回転させるよう、制御部301がパン駆動手段201を制御するように構成したが、これに限るものではない。
例えば、図8(c)の監視カメラ1では、撮像画像の異常を検知した際に、ドーム101のカバー部材401に覆われていた部分がカバー部材401に覆われなくなる位置まで、ドーム101をパン方向(破線の矢印で示す方向)に回転させるように構成しても良い。具体的には、図6のステップS103で、カバー部材401に隠されていたドーム101の一部がカバー部材401から完全に現れる位置まで、ドーム101をパン方向に回転させるよう、制御部301がパン駆動手段201を制御するように構成しても良い。
また、本実施形態では、ステップS103で、所定時間経過後にドーム101を所定の角度だけパン方向に回転させるよう、制御部301がパン駆動手段201を制御するように構成したが、これに限るものではない。
例えば、ステップS103において、ステップS102で異常が検知されれば即座にドーム101を所定の角度だけパン方向に回転させるよう、制御部301がパン駆動手段を制御するように構成しても良い。これにより、スプレー噴霧などのイタズラによる監視妨害の直後から監視対象の撮像を再開することができる。
以上、本発明をその好適な実施形態に基づいて詳述してきたが、本発明はこれら特定の
実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の様々な形態も本発
明に含まれる。また、上述した実施形態の一部を適宜組み合わせても良い。
実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の様々な形態も本発
明に含まれる。また、上述した実施形態の一部を適宜組み合わせても良い。
1 監視カメラ
101 ドーム
105 レンズユニット
200 駆動ユニット
301 制御部
101 ドーム
105 レンズユニット
200 駆動ユニット
301 制御部
Claims (8)
- 被写体を撮像して撮像画像データを生成するレンズユニットと、
半球形状に形成され、前記レンズユニットを覆うドームと、
前記レンズユニットをパン方向に回転させることができるパン回転手段と、
前記パン回転手段による前記レンズユニットの回転を制御する制御手段と、
前記レンズユニットにより生成された撮像画像データに基づいて異常を検知する検知手段と、
を有する撮像装置であって、
前記パン回転手段は、前記ドームもパン方向に回転させることができ、
前記制御手段は、前記検知手段により異常が検知された場合に、前記ドームを回転させるように前記パン回転手段を制御することを特徴とする撮像装置。 - 前記ドームに覆われ、前記レンズユニットを支持するパンベースと、
前記パン回転手段は、前記パンベースを回転させることにより、前記レンズユニットをパン方向に回転させることを特徴とする請求項1に記載の撮像装置。 - 前記パン回転手段は、前記パンベースと前記ドームとの間に設けられていることを特徴とする請求項2に記載の撮像装置。
- 前記パン回転手段は、ギヤを含み、
前記ギヤは、前記ドームのフランジの内周部に形成されたギヤおよび前記パンベースの下端部の外周に形成されたギヤそれぞれと噛み合うことを特徴とする請求項3に記載の撮像装置。 - 前記パン回転手段は、駆動源およびクラッチ機構を更に含み、
前記クラッチ機構は、前記駆動源の駆動速度に応じ、前記駆動源からの駆動力を、前記パンベースに形成されたギヤに伝達することなく、前記ドームに形成されたギヤに伝達することを特徴とする請求項4に記載の撮像装置。 - 前記制御手段は、前記検知手段により異常が検知されなくなるまで前記ドームを回転させるように前記パン回転手段を制御することを特徴とする請求項1乃至5のいずれか一項に記載の撮像装置。
- 異常が検知されたか否かを示す異常検知情報を格納する記憶部を更に有し、
前記制御手段は、前記検知手段により異常が検知された場合には、異常が検知されたことを示すように、前記記憶部に格納された前記異常検知情報を設定することを特徴とする請求項1乃至6のいずれか一項に記載の撮像装置。 - 外部のカメラ制御装置からパン回転を指示されたか否かを判定する判定手段を更に有し、
前記制御手段は、前記パン回転を指示されたと前記判定手段により判定された場合に、前記ドームおよび前記レンズユニットの両方をパン方向に回転させるように、前記パン回転手段を制御する請求項1乃至7のいずれか一項に記載の撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119251A JP2012249082A (ja) | 2011-05-27 | 2011-05-27 | 撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119251A JP2012249082A (ja) | 2011-05-27 | 2011-05-27 | 撮像装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012249082A true JP2012249082A (ja) | 2012-12-13 |
Family
ID=47469111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011119251A Withdrawn JP2012249082A (ja) | 2011-05-27 | 2011-05-27 | 撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012249082A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101678378B1 (ko) * | 2016-06-07 | 2016-11-22 | 양종만 | 위장 렌즈가 구비된 감시 카메라 |
| JP2017531201A (ja) * | 2014-08-26 | 2017-10-19 | カール ツァイス マイクロスコピー ゲーエムベーハーCarl Zeiss Microscopy Gmbh | 位相コントラスト撮像 |
| JP2017212576A (ja) * | 2016-05-25 | 2017-11-30 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| CN112285987A (zh) * | 2020-10-15 | 2021-01-29 | 河北工程大学 | 一种工业相机自清洁防护系统 |
-
2011
- 2011-05-27 JP JP2011119251A patent/JP2012249082A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017531201A (ja) * | 2014-08-26 | 2017-10-19 | カール ツァイス マイクロスコピー ゲーエムベーハーCarl Zeiss Microscopy Gmbh | 位相コントラスト撮像 |
| JP2017212576A (ja) * | 2016-05-25 | 2017-11-30 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| KR101678378B1 (ko) * | 2016-06-07 | 2016-11-22 | 양종만 | 위장 렌즈가 구비된 감시 카메라 |
| CN112285987A (zh) * | 2020-10-15 | 2021-01-29 | 河北工程大学 | 一种工业相机自清洁防护系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4530409B2 (ja) | 監視用テレビカメラ装置 | |
| US7969527B2 (en) | Display apparatus | |
| WO2012001749A1 (ja) | 撮像装置、撮像装置の制御方法および制御方法に用いられるプログラム | |
| US11310422B2 (en) | Imaging apparatus and control method thereof of with determining of driving range in which panning driver or tilting driver rotates imaging unit | |
| JP2012249082A (ja) | 撮像装置 | |
| JP2008195495A (ja) | 映像監視装置 | |
| JP4727301B2 (ja) | 表示装置 | |
| JP2008040396A (ja) | 監視カメラ | |
| JP2011155461A (ja) | 撮像装置、ならびに、その制御方法および制御プログラム | |
| JP2008172423A (ja) | 監視カメラシステム、監視カメラ及び監視カメラの制御方法 | |
| JP5033398B2 (ja) | 監視カメラ装置 | |
| JP3979394B2 (ja) | 撮像装置 | |
| JP2009282842A (ja) | 侵入監視装置 | |
| JP5478866B2 (ja) | 撮像装置、その制御方法及びプログラム | |
| KR101804309B1 (ko) | 위치 추적 감시 카메라 | |
| JP2007006397A (ja) | 撮像装置、この撮像装置のフォーカス調整方法 | |
| JP4827448B2 (ja) | 投射型映像表示装置 | |
| JP2006352736A (ja) | 監視カメラ装置 | |
| JP2007254049A (ja) | 2方向ドアエレベータ | |
| JP6827715B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| KR102170690B1 (ko) | 감시카메라 장치 | |
| JP4444093B2 (ja) | 車載用画像表示装置 | |
| JP2008099165A (ja) | 電子機器 | |
| JP2005351960A (ja) | 撮像装置 | |
| JP6493668B2 (ja) | カメラユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |