JP2012506579A - 画像内のジェスチャを認識するための装置、方法およびコンピュータ・プログラムと、デバイスを制御するための装置、方法およびコンピュータ・プログラム - Google Patents
画像内のジェスチャを認識するための装置、方法およびコンピュータ・プログラムと、デバイスを制御するための装置、方法およびコンピュータ・プログラム Download PDFInfo
- Publication number
- JP2012506579A JP2012506579A JP2011532533A JP2011532533A JP2012506579A JP 2012506579 A JP2012506579 A JP 2012506579A JP 2011532533 A JP2011532533 A JP 2011532533A JP 2011532533 A JP2011532533 A JP 2011532533A JP 2012506579 A JP2012506579 A JP 2012506579A
- Authority
- JP
- Japan
- Prior art keywords
- gesture
- image
- description
- region
- parameters
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


































Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/48—Extraction of image or video features by mapping characteristic values of the pattern into a parameter space, e.g. Hough transformation
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Image Analysis (AREA)
Abstract
【選択図】図1
Description
図1は、画像内の文字を認識する装置のブロック図を示す。図1に記載の装置は、全体として100で示される。装置100は、画像110を受けて、画像110に基づいて、画像110内で認識されたジェスチャのジェスチャコード120を供給するように構成される。装置100は、画像110または画像の前処理されたバージョンを受けて、そして、同定されたジェスチャ構成要素に関する情報132を供給するように構成されたハフ変換器130を含む。装置100は、ハフ変換器130から同定されたジェスチャ構成要素に関する情報132を受けて、そして、同定されたジェスチャ構成要素に関する情報132に基づいてジェスチャ記述142を供給するように構成されたジェスチャ記述生成器140を更に含む。装置100は、ジェスチャ記述生成器140からジェスチャ記述142を受けて、そして、それに基づいて、認識されたジェスチャのジェスチャコード120を供給するように構成されたジェスチャ分類器150を更に含む。
図2は、画像内のジェスチャを認識するための装置のブロック図を示す。図2に記載の本装置は、全体として200で示される。装置200は、ラスタライズされた画像210を受けて、そのラスタライズされた画像210に基づいて、そのラスタライズされた画像内の認識されたジェスチャのジェスチャコード220を供給するように構成される。装置200は、ラスタライズされた画像210を受けて、それに基づいて、選択された画像細部232または選択されることになる画像細部に関する情報を供給するように構成された画像細部選択手段230を任意選択で含む。装置200は、ラスタライズされた画像210または選択的な画像細部選択手段230によって供給された画像細部を受けて、画像210または画像細部232に含まれるピクセルを分類するように構成されたピクセル分類器240を更に含む。ピクセル分類器240は、そのラスタライズされた画像210またはラスタライズされた画像細部232に基づいて分類された画像242(または分類された画像細部242)を供給するように更に構成される。装置200は、その分類された画像242(または分類された画像細部)を受けて、分類された画像(または分類された画像細部)に基づいて輪郭パラメータ252を供給するように構成された輪郭線決定器250を更に含む。任意選択で、装置200は、例えば、分類された画像(または分類された画像細部)を受けて、分類された画像(または分類された画像細部)に基づいて、少なくとも一つの領域パラメータ262を供給するように構成されうる領域パラメータ決定器260を更に含む。装置200は、輪郭パラメータ252(または複数の輪郭パラメータ)を受けるように構成されたジェスチャ記述生成器270を更に含む。ジェスチャ記述生成器は、任意の領域パラメータ262(または複数の領域パラメータ)を受けとるように任意選択で更に構成されうる。ジェスチャ記述生成器272は、輪郭パラメータ252(または複数の輪郭パラメータ252)に基づいてジェスチャ記述272を供給するように構成される。以下で説明されるように、ジェスチャ記述生成器272はまた、ジェスチャ記述272を生成するときに、領域パラメータ262(または複数の領域パラメータ262)を考慮するように任意選択で構成されうる。
図3は、本発明の実施形態に記載の画像前処理のブロック図を示す。図3に記載の画像前処理は、全体として300で示される。画像前処理300は、画像前処理170と取って代わるか、または、画像細部選択手段230の機能、および/または、ピクセル分類器240の機能を引き継ぎうる。例えば、画像前処理300は、画像310を受けて、画像310の画像または画像細部の前処理されたバージョン320、または、画像310の画像細部の前処理されたバージョンを供給するように構成される。
加えて、例えば、画像前処理300は、エッジ認識340を含みうる。エッジ認識340は、例えば、画像310内の、または、画像のバージョン内のエッジを認識するように構成されうる。ここで、前記バージョンは2値化器330によって供給される。例えば、エッジ認識器340は、明るい領域および暗い領域の間、および/または、異なる色の間の変化を認識するように構成されうる。エッジ認識が画像処理の分野から周知であるので、エッジ認識の詳細は、これ以上深くはここでは言及しない。
画像前処理300は、ジェスチャの画像細部認識、および/または、画像細部選択手段を任意選択で更に含みうる。そして、それらは共に350によって示される。ジェスチャの画像細部認識は、例えば、画像310の画像細部、または、ジェスチャを含む(またはジェスチャがあると仮定される)画像310の対応する処理されたバージョンの画像細部を認識するように構成されうる。
加えて、2値化、エッジ認識、ジェスチャ画像細部認識および画像細部選択のさまざまなワークステップが、画像310の前処理されたバージョン、画像310の前処理された画像細部、または、画像310の選択された画像細部を得るために、要求されるいかなる命令においても実行されうることは述べるべきことである。画像の前処理されたバージョンの、画像細部の前処理されたバージョンの、または、選択された画像細部の更なる処理を実行するハフ変換器は、このように、選択された画像細部に対応する画像の前処理されたバージョンを処理するように構成されうる。
2値化器330に関する詳細について、以下の図4によって説明する。図4は、本発明の実施形態によるピクセル分類器または2値化器のブロック図を示す。図4に記載のピクセル分類器は、全体として400で示される。ピクセル分類器400は、ジェスチャに属するピクセルを同定するように構成される。
輪郭パラメータが分類された画像又は分類された画像細部に基づいてどのように決定されうるかについての詳細な説明は、図5を用いて以下に与えられる。この目的で、図5は、本発明の実施形態に従う輪郭線決定器のブロック図を示す。図5に記載の輪郭線決定器は、全体として500で示される。
図2に記載の選択的なパラメータ決定器260に関するいくつかの詳細について、以下の図6aにより説明する。この目的で、図6aは、本発明の実施形態による領域パラメータ決定器のブロック図を示す。図6aに示された領域パラメータ決定器は、全体として600で示され、領域パラメータ決定器360を交換しうる。
その中に同定されうるさまざまなジェスチャおよびジェスチャ構成要素について、図7a、7b、7cおよび7dを参照として以下に説明する。
続いては、ジェスチャ記述が同定されたジェスチャ構成要素に関する情報を使用することによりどのように生成されうるかについての説明である。同定されたジェスチャ構成要素に関する情報は、例えば、円弧、楕円弧の、円弧の細部の、楕円弧の細部の、または、ほぼ直線の位置を表しうる。同定されたジェスチャ構成要素に関する情報は、ハフ変換器によって、例えば、ハフ変換器130によって、または、輪郭線決定器250によって、供給されうる。同定されたジェスチャ構成要素に関する情報は、例えば、輪郭パラメータ252および/または520の形などの輪郭パラメータの形で、供給されうる。例えば、以下で詳細に説明されるハフ変換器は、ジェスチャの画像(またはそこから結果として生じるエッジ画像)の弧(例えば円弧または楕円弧の細部)を同定するように構成されうる。ハフ変換器130は、例えば、左方に、又は、右方に、又は、上方に、又は、下方に開かれた、円弧又は楕円弧の細部を認識するように構成されうる。ハフ変換器は、右方に開かれた円弧の細部と、左方に開かれた円弧の細部を識別するように構成されうる。同様に、ハフ変換器は、下方に開かれた円弧の細部と、上方に開かれた円弧の細部を識別するように構成されうる。要約すると、このように、全般的に見て、ハフ変換器が異なる方向へ開かれた弧(円弧および/または楕円弧の細部)を識別可能でありうることが述べられうる。
・方向(上方に、下方に、左方に、右方に開かれている)
・極値の位置(x座標およびy座標)
・曲率半径(任意選択で)
・方向(例えば水平に対する角度)
・始点および終点、又は、長さおよび中心
図9aおよび9bを参照して、ジェスチャ1(「5本指、わずかに広げられた手」)のさまざまなジェスチャ記述を以下で説明する。
ジェスチャ記述生成器のさまざまな詳細について、図10、11および12を参照として以下に説明する。
図10は、本発明の実施形態によるジェスチャ記述生成器のブロック図を示す。図10に記載のジェスチャ記述生成器は、全体として1000で示される。ジェスチャ記述生成器1000は、同定されたジェスチャ構成要素に関する情報を受けるように構成され、そして、前記情報は1010で示される。情報1010は、例えば、その画像内で、または、その画像の前処理されたバージョン内で同定されたさまざまな弧(例えば円弧または楕円弧)のパラメータの無順序のリストを含みうる。例えば、同定された円弧または楕円弧のパラメータに関する情報は、ハフ変換器によって得られうる。
図11は、本発明の別の実施形態によるジェスチャ記述生成器のブロック図を示す。図11に記載のジェスチャ記述生成器は、全体として1100で示される。ジェスチャ記述生成器1100は、同定されたジェスチャ構成要素(弧および任意選択の直線)に関する情報1110を受けるように構成される。そして、情報1110は、情報1010に対応する。
図12は、本発明の別の実施形態によるジェスチャ記述生成器のブロック図を示す。図12に記載のジェスチャ記述生成器は、全体として1200で示される。
以下に、どのようにジェスチャコードがジェスチャ記述に基づいて得られうるかについての記述が与えられる。ジェスチャ記述に基づいてジェスチャコードを得ることは、分類として理解されうる。
図13は、本発明の実施形態によるジェスチャ分類器のブロック図を示す。図13に記載のジェスチャ分類器は、全体として1300で示される。ジェスチャ分類器1300は、ジェスチャ記述1310を受けて、ジェスチャ記述1310に基づいてジェスチャコード1320を供給するように構成される。例えば、ジェスチャ分類器1300は、ジェスチャ記述1310を異なるジェスチャ構成要素のパラメータのベクトルとみなしる。ジェスチャ分類器は、例えば、比較ジェスチャのジェスチャ構成要素のパラメータの組を含んでいるデータベースにアクセスするように更に構成されうる。例えば、ジェスチャ分類器は、ジェスチャ記述1310によって表されたジェスチャ構成要素を表しているパラメータの組と比較ジェスチャに属しているジェスチャ構成要素を表しているパラメータの組との間の類似性の程度を決定するように構成されうる。例えば、ジェスチャ分類器1300は、いずれの比較ジェスチャが最大の類似性があるか、または整合するかを決定するために、ジェスチャ記述1310によって表されたジェスチャ構成要素のパラメータの組と、異なる比較ジェスチャに属しているパラメータの組とを比較しうる。これに関連して、ジェスチャ記述1310に属するジェスチャ構成要素の一組のパラメータと比較ジェスチャのジェスチャ構成要素に属する一組のパラメータとの間の違いは、例えば、数学的距離の大きさを使用するとともに、決定されうる。例えば、このために、さまざまなパラメータの組は、違いがベクトルのノルムによって評価されるベクトルとして解釈されうる。これに関連して、関連するパラメータの組がジェスチャ記述によって表されたパラメータの組との違いが最小となる比較ジェスチャについてのインデックスが決まりうる。ジェスチャコードを決定するためのありうる公式が、図13から見られうる。そこに示された公式によると、例えばベクトルのノルムの形で距離の大きさは算出され、そして、現在の画像のジェスチャ記述のパラメータベクトルと(比較ジェスチャコードiを有している)異なる比較ジェスチャのパラメータベクトルとの間の違いが決まり、その比較ジェスチャは異なるインデックス又は比較ジェスチャコードiによって識別される。このように、例えば、ジェスチャ記述1310によって表されたジェスチャに(パラメータベクトルに関して)最も似たその比較ジェスチャの比較ジェスチャインデッスクスiは決定される。例えば、比較ジェスチャの対応するジェスチャインデックスiは、ジェスチャコード1320としての機能を果たしうる。
図14は、本発明の別の実施形態によるジェスチャ分類器のブロック図を説明する。図14に記載のジェスチャ分類器は、全体として1400で示される。
図15は、本発明の実施形態によるジェスチャ記述検査器のブロック図を示す。図15に記載のジェスチャ記述検査器は、全体として1500で示される。ジェスチャ記述検査器1500は、ジェスチャ記述1510を受けて、パラメータによって表されたジェスチャ構成要素の許容されうる組み合わせをジェスチャ記述1510が示すかどうかを検査するように構成される。これに関連して、ジェスチャ記述検査器1500は、図1に記載の装置100および図2に記載の装置200において、それぞれ、使用されうる。
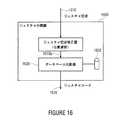
どのようにジェスチャコードがジェスチャ記述に基づいて得られうるかについての簡単な説明が、以下に与えられる。この目的で、図16は、本発明の実施形態によるジェスチャ分類器のブロック図を示す。図16に記載のジェスチャ分類器は、全体として1600で示される。ジェスチャ分類器1600は、ジェスチャ記述1610を受けて、それに基づいてジェスチャコード1620を供給するように構成される。ジェスチャ分類器1600は、ジェスチャ記述1610、または、任意選択で、修正されたジェスチャ記述1610aを受けるように構成されたデータベース比較器1630を含む。データベース比較器は、受け取ったジェスチャ記述1610または修正されたジェスチャ記述1610aを、データベース1650に含まれた複数の比較ジェスチャ記述と比較するように更に構成される。データベース1650の比較ジェスチャ記述が、それらに関連したジェスチャコードを有する場合、例えば、データベース比較器1630は、例えば同定されたジェスチャコード1620として、比較ジェスチャ記述が、現在処理されたジェスチャ記述1610または修正されたジェスチャ記述1610aと整合する、又は、最大の類似性を示すデータベース1650からの比較ジェスチャのジェスチャコードを供給しうる。
本発明によるいくつかの実施形態において、ジェスチャ記述生成器は、ジェスチャの動きに関する情報を含んでいるジェスチャ記述を供給するように構成されうる。あるいは、ジェスチャ分類器は、ジェスチャ記述生成器によって供給されたジェスチャ記述から、ジェスチャの動きに関する情報を抽出するように構成されうる。
弧(例えば円弧または楕円弧)を同定するためのハフ変換を実行する際のアプローチについて、以下に説明する。様々な種類のハフ変換が使用されうるというこの点に留意されたい。
例えば円弧および楕円弧の細部を認識するために使用されうる、いわゆる「並列ハフ変換」を実行するためのアプローチについて、以下に説明する。
図19は、本発明の実施形態によるパターン認識手段の利用のための典型的な参照曲線の図解を示す。換言すれば、図19は、発明のパターン認識手段の利用のための参照曲線形状の2つの例の図解を示す。図19の図解は、全体として1900で示される。
図20aは、上方に向きを定められた指先の輪郭線を含んでいる典型的な画像細部の略図を示す。図20aに記載の画像細部は、全体として2000で示される。
図20bは、右上を指さしている指を示している画像細部の略図を示す。図20bに記載の画像細部は、全体として2050で示される。画像領域2070は、例えば、下方へ開かれており、極値点P5を含んでいる弧を含み、そして、左方へ開かれた弧は画像領域2080に存在する。弧は、さらにまた、ハフ変換器によって認識されうる。したがって、ハフ変換器は、画像領域2080に存在する弧の極値点P5aの位置に関する情報を供給しうる。
以下に、どのように記号的アフィン写像がジェスチャ記述生成器140によって、または、ジェスチャ分類器150によって(および/または、ジェスチャ記述生成器270によって、または、ジェスチャ分類器280によって)実行されうるかについての説明が与えられる。
・シフト
・回転
・スケーリング
まず、シフトについて以下に説明する。最初のジェスチャ記述から始まって、例えば、個々のジェスチャ構成要素のための全ての位置パラメータ(例えばx座標およびy座標)がいずれの場合においても同じように変えられるという点で、シフトされたジェスチャ記述は生成されうる。換言すると、例えば、特定の予め定義された値が、(それらが輪郭線に属するので、ジェスチャ記述の生成において考慮される)ジェスチャ構成要素の全ての位置パラメータに加算、または、減算される。例えば、特定値が、x方向の位置パラメータに加算されうる。あるいは、または、加えて、(別の)特定値は、y方向の位置パラメータに加算、または、減算されうる。このように、シフトは、ジェスチャ構成要素の位置パラメータの単純な変化によって遂行されうる。
回転の機能について、以下に説明する。これに関連して、図21について述べる。図21は、循環的にジェスチャ記述を順に回転することによるアプローチの略図を示す。最初のジェスチャ記述は、図21の2110で示される。ここから始まって、一つ回転したジェスチャ記述2120は、第1の循環的回転によって得られる。更なる循環的回転によって、二つ回転したジェスチャ記述2130は得られる。図21から分かるように、個々のジェスチャ構成要素は、循環的に回転される。循環的な回転の方向は、異なるように選択されうる。基本的に、ジェスチャ記述が各場合において更に回転されることになるジェスチャ構成要素の数はランダムにも選択されうる。循環的に回転されたジェスチャ記述2120、2130は、最初のジェスチャ記述2110によって表されたジェスチャに関して回転されたジェスチャを表す。一実施形態において、最初のジェスチャ記述2110と(一つ以上の)循環的に回転されたジェスチャ記述2120、2130は、データベースに格納された比較ジェスチャ記述と比較されうる。
ジェスチャ記述のスケーリングについて、以下に説明する。ジェスチャ記述のスケーリングは、例えば、最初のジェスチャ記述から始まったサイズ決定パラメータのスケーリングを含むが、形状決定パラメータは不変のままである。
ジェスチャ認識のための本発明装置の1つの考えられるアプリケーションについて図23を参照して以下に説明する。図23に記載の装置は、全体として2300で示される。
本発明による別の実施形態について、図24を参照に以下に説明する。図24は、本発明の実施形態によるカメラを制御する装置のブロック図を示す。図24に記載の装置は、全体として2400で示される。装置2400は、画像信号2412を供給するように構成されたカメラ2410を含む。装置2400は、本明細書において説明されたジェスチャ認識器に対応するジェスチャ認識器2420を更に含む。例えば、ジェスチャ認識器2420は、画像信号2412に基づいて、例えば、位置決め信号2422として用いられうるジェスチャコードを供給するように構成される。例えば、位置決め信号2422は、カメラ2410のチルトおよび/またはパンを遂行するのに利用されうる。このように、例えば、画像信号2412によって表された画像において認識されたジェスチャに応じて、カメラ2410のチルトおよび/またはパンは、遂行されうる。このように、全体として、ジェスチャは、カメラ2410の位置合わせを制御するために使用されうる。あるいは、または、加えて、例えば、速写、ズーム機能、露光パラメータの設定など、カメラの別の機能は、制御されうる。
方法の記載について、以下に与える。図25は、本発明の実施形態による画像のジェスチャを同定する方法のフローチャートを示す。図25に記載の方法は、全体として2500で示される。
ジェスチャを同定する別の方法は、図26を参照に以下に簡潔に述べられる。図26に記載の方法は、全体として2600で示される。方法2600は、全体として、画像2610に基づいてジェスチャ識別子2612を供給するように構成される。第1の(任意選択の)ステップ2620において、方法2600は、有用な情報を伝えている画像領域を選択することを含む。このように、例えば、画像領域2622は、同定されうる。更なるステップ2630において、方法2600は画像領域2622(または画像2610)のピクセルを同定することを含む。ここで、前記ピクセルはジェスチャに属する。こうして、同定されたピクセルを表す情報2632は利用できる。同定されたピクセルに関する情報2632に基づいて、既定の形状(例えば異なる開き方向の弧)の輪郭線部分は、輪郭線部分を表す輪郭パラメータを得るために、更なるステップ2640において同定されうる。このように、例えば輪郭線部分を表す輪郭パラメータ2642は得られる。加えて、更なるステップ2650において、同定されたピクセルによって定められた領域の特性を表す一つ以上の領域パラメータは、得られうる。こうして、領域パラメータ2652は、利用できる。更なるステップ2660において、例えば、画像に含まれたジェスチャは、同定されうる。その分類は、例えば、複数の比較パラメータの組と、少なくとも一つの領域パラメータおよび少なくとも一つの輪郭パラメータを含んでいるパラメータの組を比較することによって遂行されうる。この状況において、最も可能性のある整合、または少なくとも充分な整合が存在する比較パラメータの組のうちの1つが同定されうる。ジェスチャ識別子2612は、このように、比較パラメータの組のうちのいずれが最も現在のパラメータの組に対応するかに応じて供給されうる。
本発明装置および本発明方法は、ハードウェアにおいて、または、ソフトウェアにおいて実行されうる。実施は、対応する方法が実行されるように、プログラミング可能な計算機システムと協動しうる電子的に読み込み可能な制御信号を有する例えばディスク、CD、DVD、ROM、PROM、EPROM、EEPROMまたはフラッシュメモリなどのデジタル記憶媒体上でありうる。
一実施形態において、本発明構想は、データストリームから情報を抽出し、そして、発見されたパターンを解釈する、画像または動画記録のための方法および装置である。例えば、本方法および本装置は、文字を認識するのに役立つ。アプリケーションの具体的事例において、文字は、異なる手の位置によって生成されたジェスチャでありうる。例えば、手(または両手)のポーズは、カメラによって記録される。マルチステージ処理方法において、本方法および本装置は、現存のビデオシーケンス(フレーム)または個々の画像を処理して、そこからジェスチャを抽出する。前処理ステージは、例えば、皮膚の色と関連している、画像の分割およびピクセルの分類である。画像は、例えば、皮膚色のピクセルおよび非皮膚色のピクセルに分離される。
本発明によるいくつかの実施形態は、例えばラジオまたはテレビ受像機のなどの各種デバイスの遠隔制御のために使用されうる。本発明による実施形態は、例えば、障害者あるいは高齢者(「高齢者世代」)を援助するために使用されうる。本発明による全ての実施形態は、工業設備を制御するために使用されうる。かなり一般的に、本発明による実施形態は、人と機械の相互のやりとりを改善するために使用されうる。
本発明によるいくつかの実施形態において、本明細書において説明された、ジェスチャ認識のためのエッジ検出方法のアプリケーションは、特に重要である。
本発明のいくつかの実施形態において、手のモデルは、使用されうる。手には、例えば、5本の指(親指、人さし指、中指、薬指および小指)がある。したがって、手の3Dワイヤーフレームモデルは、(例えば、「Adope Maya」によって使用されているように)使用されうる。
本発明によるいくつかの実施形態において使用されうるような、優先的形状を有するバリエーションのセグメント化の構想は、以下に簡単に説明される。詳しくは、「コンピュータ・ビジョンの数学モデルのハンドブック」という本の8章を参照されたい。
「湾曲伝播」、「レベルセット方法」および「グループ化」の構想を以下で簡単に説明する。これに関する詳細は、上述の「コンピュータ・ビジョンの数学モデルのハンドブック」の第9章で説明される。湾曲伝播は、それがぴったりとオブジェクトにくっつくまで、オブジェクト周辺にそれ自体を位置付けるコードである。
いくつかの実施形態では、幾何学的スネーク確率モデルを特徴とする構想が使用されうる。この構想において、前述のDNA塩基配列決定算法を実行しうる。というのは、前記算法もまた、サブシーケンスの集合および挿入および処理量を認識する。
本発明のいくつかの実施形態において、「WinDelayLine」の集合の、および/または、認識されたジェスチャ構成要素を表しているパラメータのアフィン記号的写像は、使用されうる。
いくつかの実施形態では、静的ジェスチャだけでなく、動きのジェスチャも考慮することは、可能である。例えば、ジェスチャ構成要素の位置の特定の変化が、2つの連続した画像間(またはいくつかの連続した画像間)で生じたときに、ジェスチャは認識されうる。

いくつかの実施形態において使用されうる更なる追加について、以下に説明する。
a) 結合されたヒンジモデル重心の3D運動学および角運動量の慣性の楕円
および/または
b) 直交のラドン変換を使用した完全な逆再構成。
Claims (42)
- 画像(110;210)内のジェスチャを認識するための装置(100;200)であって、
同定されたジェスチャ構成要素に関する情報(132;252)を得るために、前記同定されたジェスチャ構成要素として、前記画像内の、または、前記画像の前処理されたバージョン(232、242)内の弧(B1〜B9)を同定するように構成されたハフ変換器(130;250)と、
前記同定されたジェスチャ構成要素に関する前記情報を使用するときに、ジェスチャ記述(142;272)を得るように構成されたジェスチャ記述生成器(140;270)と、
比較の結果、認識されたジェスチャのジェスチャコード(120;220)を供給するために、前記ジェスチャ記述を、それらと関連したジェスチャコードを有する複数の比較ジェスチャ記述と前記比較をするように構成されたジェスチャ分類器(150;280)と、を含むこと、を特徴とする、装置。 - 前記装置は、ジェスチャ領域の領域パラメータ(262)を決定するように構成された領域パラメータ決定器(260;600)を含み、
前記ジェスチャ記述生成器(270)は、前記領域パラメータを使用するときに、前記ジェスチャ記述(272)を得るように構成されること、を特徴とする、請求項1に記載の装置。 - 前記領域パラメータ(262)は、それぞれに領域輪郭の前記領域の特性を表すこと、を特徴とする、請求項2に記載の装置。
- 前記領域パラメータ決定器(260)は、前記領域パラメータとして、前記ジェスチャ領域の領域重心(S)に関する情報、または、
前記ジェスチャ領域の範囲(L1、L2)に関する情報、
または、前記ジェスチャ領域の運動量(M)に関する情報、
または、前記ジェスチャ領域の偏心(E)に関する情報、を得るように構成されること、を特徴とする、請求項2または請求項3に記載の装置。 - 前記ジェスチャ記述生成器(270)は、前記ジェスチャ記述(272)として、前記ジェスチャ領域の輪郭部分を表しているパラメータの組を供給するように構成されること、および、
前記ジェスチャ記述生成器は、前記領域パラメータを使用するときに、前記ジェスチャ記述を規格化するように構成されること、を特徴とする、請求項2〜請求項4のいずれかに記載の装置。 - 前記領域パラメータ決定器(260)は、前記領域パラメータ(262)として、前記ジェスチャ領域の領域重心の位置に関する情報を得るように構成されること、および、
前記ジェスチャ記述生成器(270)は、前記ジェスチャ領域の前記輪郭部分の位置パラメータが前記ジェスチャ領域の前記領域重心(S)の前記位置に関連しているように、前記ジェスチャ記述(272)を供給するように構成されること、を特徴とする、請求項2〜請求項5のいずれかに記載の装置。 - 前記領域パラメータ決定器(260)は、前記領域パラメータ(262)として、前記ジェスチャ領域の寸法(L1、L2)に関する情報を得るように構成されること、および、
前記ジェスチャ記述生成器(270)は、前記ジェスチャ領域の前記寸法に関する前記情報に基づいて、サイズに関して、前記輪郭部分の位置パラメータまたは寸法パラメータが規格化されるように、前記ジェスチャ記述を供給するように構成されること、を特徴とする、請求項2〜請求項6のいずれかに記載の装置。 - 前記ハフ変換器(130;250)は、同定されたジェスチャ構成要素として、さまざまな方向に前記画像を通って伸びている複数の直線セグメントを、同定するように構成されること、を特徴とする、請求項1〜請求項7のいずれかに記載の装置。
- 前記ハフ変換器(130;250)は、同定された直線セグメントの位置、長さ、または、方向に関する情報を供給するように構成されること、および、
前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述を生成するための前記同定された直線セグメントに関する、前記ハフ変換器により供給された前記情報(132;252)を使用するように構成されること、を特徴とする、請求項8に記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、同定されたジェスチャ構成要素(B1〜B9、L1〜L10)のパラメータの順序付けられたリストとして前記ジェスチャを表しているジェスチャの記述を、前記ジェスチャ記述(142;272)として得るように構成されること、を特徴とする、請求項1〜請求項9のいずれかに記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、
前記順序付けられた同定されたジェスチャ構成要素が、それらのシーケンスに従って、ジェスチャ領域の連続の輪郭線に沿って順序付けられるような、または、
前記順序付けられた同定されたジェスチャ構成要素が、前記ジェスチャ領域の連続の輪郭線を表すような、方法で、前記ジェスチャ記述(142;272)を順序付けるように構成されること、を特徴とする、請求項10に記載の装置。 - 前記ハフ変換器(130;250)は、前記同定された弧の位置、向き、弧長、曲率半径、または、曲率の角度に関する情報(132;252)を供給するように構成されること、および、
前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)を生成するために、前記同定された弧の前記位置、前記向き、前記弧長、前記曲率半径、または、前記曲率の角度に関する、前記ハフ変換器によって供給された前記情報を使用するように構成されること、を特徴とする、請求項1〜請求項11のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述がジェスチャ領域の輪郭線に属する円弧または楕円弧(B1〜B9)の相対的位置関係についての記述を含むように、前記ジェスチャ記述(142;272)を生成するように構成されること、を特徴とする、請求項1〜請求項12のいずれかに記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、前記各円弧または楕円弧の向きに関する、前記ハフ変換器によって供給された情報を、同定された円弧または楕円弧(B1〜B9)のための前記ジェスチャ記述(142;272)に含むように構成されること、を特徴とする、請求項1〜請求項13のいずれかに記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、前記同定された円弧または前記同定された楕円弧の極値点(P1〜P9)の位置に関する、前記ハフ変換器(130;250)によって供給された情報を、同定された円弧または楕円弧(B1〜B9)のための前記ジェスチャ記述(142;272)に含むように構成されること、を特徴とする、請求項1〜請求項14のいずれかに記載の装置。
- 前記ハフ変換器(130;250)は、曲率半径が大きさの点で所定の最大許容曲率半径よりも小さいような円弧または楕円弧(B1〜B9)だけを同定するように構成されること、を特徴とする、請求項1〜請求項15のいずれかに記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、選択された隣接する同定されたジェスチャ構成要素(B1〜B9、L1〜L10)をつぎ合わせることによって、前記ジェスチャの記述を生成するように構成されること、および、
前記ジェスチャ記述生成器は、前記選択されたジェスチャ構成要素が始点から終点までの連続線形状を表すように、同定されたジェスチャ構成要素の全体から、前記ジェスチャの前記記述に使用された前記選択されたジェスチャ構成要素を選択するように構成されること、を特徴とする、請求項1〜請求項16のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記同定されたジェスチャ構成要素(B1〜B9、L1〜L10)に基づいて、ジェスチャ領域の輪郭線の連続した部分を表している特徴ベクトルを生成するように構成されること、を特徴とする、請求項1〜請求項17のいずれかに記載の装置。
- 前記ジェスチャ分類器(150;280;1300;1400;1600)は、特徴ベクトルと比較特徴ベクトルとの間の違いの尺度を得るために、そして、前記違いの前記尺度に基づいて、前記特徴ベクトルに属しているジェスチャコードを決定するために、前記ジェスチャ記述(142;272)の前記情報を含んでいる前記特徴ベクトルを、比較ジェスチャと関連した複数の前記比較特徴ベクトルと比較するように構成されたデータベース比較器(1630)を含むこと、を特徴とする、請求項1〜請求項18のいずれかに記載の装置。
- 前記画像内のエッジを認識して、前記画像(310)に基づいて、前記画像の前記前処理されたバージョン(320)としてエッジ画像を生成するように構成されたエッジ認識器(340)を含むこと、を特徴とする、請求項1〜請求項19のいずれかに記載の装置。
- 明度がジェスチャ領域に属しているピクセルとして所定の範囲にあるピクセルを同定するように構成されること、を特徴とする、請求項1〜請求項20のいずれかに記載の装置。
- 前記装置は、隣接するジェスチャ領域を含む画像細部を前記画像(310)内において同定するように構成された画像細部セレクタ(350)を含むこと、および、
前記ハフ変換器(130;250)は、前記画像細部に対応する前記画像の前処理されたバージョンを処理するように構成されること、を特徴とする、請求項1〜請求項21のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)として、ジェスチャ領域の輪郭部分を表しているパラメータの順序付けられた組を供給するように構成されることと、
前記ジェスチャ分類器(150;280)は、パラメータの前記順序付けられた組と比較パラメータの組との間の違いに関する情報を得るために、パラメータの前記順序付けられた組(2110)を比較ジェスチャと関連した複数の前記比較パラメータの組と比較するように構成されることと、
前記ジェスチャ分類器は、パラメータの前記順序付けられた組の一つ以上の循環的に回転したバージョンと前記比較パラメータの組との間の違いに関する情報を得るために、パラメータの前記順序付けられた組の一つ以上の循環的に回転したバージョン(2120、2130)を前記複数の比較パラメータの組と比較するように構成されることと、
前記ジェスチャ分類器は、前記違いに関する前記情報に基づいて、パラメータの前記順序付けられた組に属している、または、パラメータの前記順序付けられた組の回転したバージョンに属している、ジェスチャコード(120;220)を決定するように構成されること、を特徴とする、請求項1〜請求項22のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)として、ジェスチャ領域の輪郭部分を表しているパラメータの順序付けられた組を供給するように構成されることと、
前記ジェスチャ分類器(150;280)は、パラメータの前記順序付けられた組と比較パラメータの組との間の違いに関する情報を得るために、パラメータの前記順序付けられた組(2210)を、比較ジェスチャと関連している複数の前記比較パラメータの組と比較するように構成されることと、
前記ジェスチャ分類器は、パラメータの前記順序付けられた組の少なくとも一つのスケールされたバージョンと前記比較パラメータの組との間の違いに関する情報を得るために、パラメータの前記順序付けられた組の一つ以上の前記スケールされたバージョン(2220、2230)を、前記複数の比較パラメータの組と比較するように構成されることと、
前記ジェスチャ分類器は、前記違いに関する前記情報に基づいて、パラメータの前記順序付けられた組に属している、または、パラメータの前記順序付けられた組のスケールされたバージョンに属しているジェスチャコードを決定するように構成されること、を特徴とする、請求項1〜請求項23のいずれかに記載の装置。 - 前記ジェスチャ分類器(150;280)は、前記一つ以上のスケールされたバージョンが、前記画像に実際に含まれたジェスチャ領域と比較して、サイズの点で拡大または縮小されるスケールされたジェスチャ領域の輪郭を表すように、パラメータの前記順序付けられた組の前記一つ以上のスケールされたバージョン(2220、2230)を得るように構成されること、を特徴とする、請求項24に記載の装置。
- 前記ジェスチャ分類器(150;280)は、前記順序付けられた組の前記一つ以上のスケールされたバージョン(2220、2230)を得るために、前記ハフ変換器(130;250)によって供給される、そして、パラメータの前記順序付けられた組の一部である、曲率半径情報をスケールするように構成されること、を特徴とする、請求項24または請求項25に記載の装置。
- 前記ジェスチャ分類器(150;280)は、パラメータの前記順序付けられた組の前記一つ以上のスケールされたバージョン(2220、2230)を得るために、パラメータの前記順序付けられた組の一部である直線の長さ情報をスケールするように構成されること、を特徴とする、請求項24〜請求項26のいずれかに記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)として、ジェスチャ領域の輪郭部分を表しているパラメータの組を供給するように構成されることと、
前記ジェスチャ分類器(150;280)は、前記ジェスチャを形成している体の部分の身体モデルによって、前記体の部分の個々要素の、パラメータの前記組によって表された前記ポーズがとられる確率を決定するように構成されることと、
前記ジェスチャ分類器は、前記ジェスチャコードを決定するときに、前記確率を考慮するように構成されること、を特徴とする、請求項1〜請求項27のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述として、ジェスチャ領域の輪郭部分を表しているパラメータの組を供給するように構成されることと、
前記ジェスチャ分類器は、パラメータ値の前記組が所定の身体の位置条件に反するかどうかを検知し、
パラメータ値の前記組が所定の位置条件に反する場合、前記ジェスチャコードの供給を抑制するように、または、エラーの信号を送るように構成されること、を特徴とする、請求項1〜請求項28のいずれかに記載の装置。 - 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)として、ジェスチャ領域の輪郭部分を表しているパラメータの組を供給するように構成されること、および、
前記ジェスチャ分類器は、前の画像に基づいて決定され、前のジェスチャ状態を表す前のジェスチャコードに応じて、現在のジェスチャ状態を表している現在のジェスチャコードを決定するように構成されること、を特徴とする、請求項1〜請求項29のいずれかに記載の装置。 - 前記ジェスチャ分類器(150;280)は、前記現在のジェスチャコードを決定するとき、どの現在のジェスチャ状態が前のジェスチャ状態に基づいて考えられうるかを表している状態遷移許容性情報を評価するように構成されること、を特徴とする、請求項30に記載の装置。
- 前記ジェスチャ分類器(150;280)は、前記状態遷移許容性情報によって許容できないものとして表される現在のジェスチャ状態への前のジェスチャ状態からの遷移を抑制するように構成されること、を特徴とする、請求項31に記載の装置。
- 前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ領域の回転に関する情報を得るように構成されること、および、
前記ジェスチャ分類器(150;280)は、前記ジェスチャコード(120;220)を決定するときに、前記ジェスチャ領域の前記回転に関する前記情報を考慮するように構成されること、を特徴とする、請求項1〜請求項30のいずれかに記載の装置。 - 前記ジェスチャ分類器(150;280)は、前記ジェスチャ領域の前記回転に関する前記情報に応じて、ジェスチャを識別するように構成されること、を特徴とする、請求項33に記載の装置。
- 前記ジェスチャ分類器(150;280)は、前記同定されたジェスチャ構成要素の位置パラメータの時間的推移に基づいて、前記ジェスチャ領域の前記回転に関する前記情報を決定するように構成されること、を特徴とする、請求項33または請求項34に記載の装置。
- 前記ジェスチャ分類器(150;280)は、異なる方向に関して前記ジェスチャ領域の運動量(mx、my)を表している領域パラメータを使用するときに、前記ジェスチャ領域の前記回転に関する前記情報を得るように構成されること、を特徴とする、請求項33〜請求項35のいずれかに記載の装置。
- 画像内のジェスチャを認識するための方法(2500)であって、
前記同定されたジェスチャ構成要素に関する情報を得るために、前記画像内の、または、前記画像の前処理されたバージョン内の弧を、同定されたジェスチャ構成要素として、同定するためのハフ変換を実行するステップ(2510)と、
前記同定されたジェスチャ構成要素に関する前記情報を使用するときに、ジェスチャ記述を生成するステップ(2520)と、
比較の結果として、認識されたジェスチャのジェスチャコードを供給するために、前記ジェスチャ記述を、それらと関連したジェスチャコードを有する複数の比較ジェスチャ記述と前記比較をするステップ(2530)と、を含むこと、を特徴とする、方法。 - コンピュータ・プログラムがコンピュータにおいて実行されるときに、請求項37に記載の方法を実行するための前記コンピュータ・プログラム。
- カメラシステム(2400)であって、
カメラによって取得されたカメラ画像を表しているカメラ信号(2412)を供給するように構成された前記カメラ(2410)と、
請求項1〜請求項36のいずれかに記載の、画像内のジェスチャを認識するための装置(2420)であって、ジェスチャを認識するための前記装置は、前記カメラ画像を受けて、それに基づいて前記ジェスチャコード(2422)を得るように構成される装置と、
前記カメラ画像において同定された前記ジェスチャの前記ジェスチャコードに応じて、前記カメラの位置合わせ、焦点合わせ、または、機能をセットするように構成された、カメラ制御器と、を含むこと、を特徴とする、カメラシステム。 - デバイス構造であって、
デバイス制御器を含んでいるデバイスと、
カメラによって取得されたカメラ画像を表しているカメラ信号を供給するように構成された前記カメラと、
請求項1〜請求項36のいずれかに記載の、画像内のジェスチャを認識するための装置であって、ジェスチャを認識するための前記装置は、前記カメラ画像を受けて、それに基づいて前記ジェスチャコードを得るように構成される装置と、を含み、
前記デバイス制御器は、前記ジェスチャコードに応じて、前記デバイスの機能を制御するように構成されること、を特徴とする、デバイス構造。 - 画像(110;210)内のジェスチャを認識するための装置(100;200)であって、
前記同定されたジェスチャ構成要素に関する情報(132;252)を得るために、前記画像内の、または、前記画像の前処理されたバージョン(232、242)内の弧(B1〜B9)を、同定されたジェスチャ構成要素として、同定するように構成されたハフ変換器(130;250)と、
前記同定されたジェスチャ構成要素に関する前記情報を使用するときに、ジェスチャ記述(142;272)を得るように構成されたジェスチャ記述生成器(140;270)と、
比較の結果として、認識されたジェスチャのジェスチャコード(120;220)を供給するために、前記ジェスチャ記述を、それらと関連したジェスチャコードを有する複数の比較ジェスチャ記述と前記比較をするように構成されたジェスチャ分類器(150;280)と、を含み、
前記ハフ変換器(130;250)は、同定されたジェスチャ構成要素として、さまざまな方向に前記画像を通って伸びている複数の直線セグメントを同定するように構成されることと、
前記ハフ変換器(130;250)は、同定された直線セグメントの位置、長さ、または、方向に関する情報を供給するように構成されることと、
前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述を生成するための前記同定された直線セグメントに関する、前記ハフ変換器によって供給された前記情報(132;252)を使用するように構成されることと、
前記ジェスチャ記述生成器(140;270)は、前記ジェスチャ記述(142;272)として、同定されたジェスチャ構成要素(B1〜B9、L1〜L10)のパラメータの順序付けられたリストとして前記ジェスチャを表しているジェスチャの記述を得るように構成されることと、を特徴とする、装置。 - 画像内のジェスチャを認識するための方法(2500)であって、
前記同定されたジェスチャ構成要素に関する情報を得るために、前記画像内の、または、前記画像の前処理されたバージョン内の弧を、同定されたジェスチャ構成要素として、同定するために、および、
同定された直線セグメントの位置、長さ、または、方向に関する情報を供給するために、同定されたジェスチャ構成要素として、さまざまな方向に前記画像を通って伸びている複数の直線セグメントを同定するために、少なくとも一つのハフ変換を実行するステップ(2510)と、
前記ジェスチャ記述が、同定されたジェスチャ構成要素のパラメータの順序付けられたリストとして、前記ジェスチャを表すように、前記同定されたジェスチャ構成要素に関する前記情報を使用するときに、前記ジェスチャ記述を生成するステップ(2520)であって、
前記ハフ変換によって供給される前記同定された直線セグメントに関する前記情報は、前記ジェスチャ記述を生成するために使用されるステップと、
比較の結果として、認識されたジェスチャのジェスチャコードを供給するために、前記ジェスチャ記述を、それらと関連したジェスチャコードを有する複数の比較ジェスチャ記述と前記比較をするステップ(2530)と、を含むこと、を特徴とする、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008052928A DE102008052928A1 (de) | 2008-10-23 | 2008-10-23 | Vorrichtung, Verfahren und Computerprogramm zur Erkennung einer Geste in einem Bild, sowie Vorrichtung, Verfahren und Computerprogramm zur Steuerung eines Geräts |
| DE102008052928.1 | 2008-10-23 | ||
| PCT/EP2009/007547 WO2010046101A1 (de) | 2008-10-23 | 2009-10-21 | Vorrichtung, verfahren und computerprogramm zur erkennung einer geste in einem bild, sowie vorrichtung, verfahren und computerprogramm zur steuerung eines geräts |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012506579A true JP2012506579A (ja) | 2012-03-15 |
| JP5303652B2 JP5303652B2 (ja) | 2013-10-02 |
Family
ID=41394074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532533A Expired - Fee Related JP5303652B2 (ja) | 2008-10-23 | 2009-10-21 | 画像内のジェスチャを認識するための装置、方法およびコンピュータ・プログラムと、デバイスを制御するための装置、方法およびコンピュータ・プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8570383B2 (ja) |
| EP (1) | EP2344980B1 (ja) |
| JP (1) | JP5303652B2 (ja) |
| DE (1) | DE102008052928A1 (ja) |
| WO (1) | WO2010046101A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160129000A (ko) * | 2014-01-05 | 2016-11-08 | 마노모션 에이비 | 모바일 디바이스를 위한 실시간 3d 제스처 인식 및 트랙킹 시스템 |
| KR101743249B1 (ko) | 2016-05-26 | 2017-06-07 | 한국과학기술원 | 엄지 손가락의 움직임을 파악하기 위해 센서를 부착할 기준 벡터를 선정하는 방법, 장치 및 프로그램 |
| JP2022507635A (ja) * | 2019-06-19 | 2022-01-18 | シャンハイ センスタイム インテリジェント テクノロジー カンパニー リミテッド | インテリジェント車両の運動制御方法および装置、機器並びに記憶媒体 |
Families Citing this family (85)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006062061B4 (de) * | 2006-12-29 | 2010-06-10 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung, Verfahren und Computerprogramm zum Bestimmen einer Position basierend auf einem Kamerabild von einer Kamera |
| US8125544B2 (en) * | 2008-09-02 | 2012-02-28 | Casio Computer Co., Ltd. | Image processing apparatus for extracting quadrangle area in image |
| DE102011012543A1 (de) | 2011-02-26 | 2012-08-30 | Walter Schopf | Vorrichtung zur Identifikation und Selektierung gebrauchter Kfz-Katalysatoren mit Einrichtungen zur Freilegung, Erkennung und Rückgewinnung ihrer Inhaltswertstoffe |
| JP2012212373A (ja) * | 2011-03-31 | 2012-11-01 | Casio Comput Co Ltd | 画像処理装置、画像処理方法及びプログラム |
| JP5488548B2 (ja) * | 2011-08-04 | 2014-05-14 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US10691219B2 (en) | 2012-01-17 | 2020-06-23 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US20150253428A1 (en) | 2013-03-15 | 2015-09-10 | Leap Motion, Inc. | Determining positional information for an object in space |
| US8693731B2 (en) | 2012-01-17 | 2014-04-08 | Leap Motion, Inc. | Enhanced contrast for object detection and characterization by optical imaging |
| US9501152B2 (en) | 2013-01-15 | 2016-11-22 | Leap Motion, Inc. | Free-space user interface and control using virtual constructs |
| US9679215B2 (en) | 2012-01-17 | 2017-06-13 | Leap Motion, Inc. | Systems and methods for machine control |
| US8638989B2 (en) | 2012-01-17 | 2014-01-28 | Leap Motion, Inc. | Systems and methods for capturing motion in three-dimensional space |
| US11493998B2 (en) | 2012-01-17 | 2022-11-08 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US9070019B2 (en) | 2012-01-17 | 2015-06-30 | Leap Motion, Inc. | Systems and methods for capturing motion in three-dimensional space |
| US12260023B2 (en) | 2012-01-17 | 2025-03-25 | Ultrahaptics IP Two Limited | Systems and methods for machine control |
| US8964045B2 (en) * | 2012-01-31 | 2015-02-24 | Microsoft Corporation | Image blur detection |
| JP5593339B2 (ja) * | 2012-02-07 | 2014-09-24 | 日本システムウエア株式会社 | 自動車のステアリングハンドルを用いるジェスチャー認識装置と手の認識方法及びそのプログラム |
| JP5867198B2 (ja) * | 2012-03-14 | 2016-02-24 | オムロン株式会社 | 領域指定方法及び領域指定装置 |
| DE102012025564A1 (de) * | 2012-05-23 | 2013-11-28 | Elmos Semiconductor Ag | Vorrichtung und Verfahren zur Kalibration einer kalibrierbaren Gestenerkennungsvorrichtung zur Übermittlung von Kommandos und Informationen an eine Mensch-Maschineschnittstelle |
| US9870056B1 (en) * | 2012-10-08 | 2018-01-16 | Amazon Technologies, Inc. | Hand and hand pose detection |
| US9285893B2 (en) | 2012-11-08 | 2016-03-15 | Leap Motion, Inc. | Object detection and tracking with variable-field illumination devices |
| US8761448B1 (en) * | 2012-12-13 | 2014-06-24 | Intel Corporation | Gesture pre-processing of video stream using a markered region |
| US10609285B2 (en) | 2013-01-07 | 2020-03-31 | Ultrahaptics IP Two Limited | Power consumption in motion-capture systems |
| US9465461B2 (en) | 2013-01-08 | 2016-10-11 | Leap Motion, Inc. | Object detection and tracking with audio and optical signals |
| DE102013000080B4 (de) * | 2013-01-08 | 2015-08-27 | Audi Ag | Aktivierung einer Kraftfahrzeugfunktion mittels eines optischen Sensors |
| US9104240B2 (en) | 2013-01-09 | 2015-08-11 | Intel Corporation | Gesture pre-processing of video stream with hold-off period to reduce platform power |
| US9459697B2 (en) | 2013-01-15 | 2016-10-04 | Leap Motion, Inc. | Dynamic, free-space user interactions for machine control |
| US9632658B2 (en) | 2013-01-15 | 2017-04-25 | Leap Motion, Inc. | Dynamic user interactions for display control and scaling responsiveness of display objects |
| US9105103B2 (en) * | 2013-01-23 | 2015-08-11 | Leap Motion, Inc. | Systems and methods of tracking object movements in three-dimensional space |
| US9292103B2 (en) * | 2013-03-13 | 2016-03-22 | Intel Corporation | Gesture pre-processing of video stream using skintone detection |
| US10620709B2 (en) | 2013-04-05 | 2020-04-14 | Ultrahaptics IP Two Limited | Customized gesture interpretation |
| US9916009B2 (en) | 2013-04-26 | 2018-03-13 | Leap Motion, Inc. | Non-tactile interface systems and methods |
| CN104143075A (zh) * | 2013-05-08 | 2014-11-12 | 光宝科技股份有限公司 | 应用于电子装置的手势判断方法 |
| US9747696B2 (en) | 2013-05-17 | 2017-08-29 | Leap Motion, Inc. | Systems and methods for providing normalized parameters of motions of objects in three-dimensional space |
| DE102013010018B3 (de) * | 2013-06-14 | 2014-12-04 | Volkswagen Ag | Kraftfahrzeug mit einem Fach zum Aufbewahren eines Gegenstands sowie Verfahren zum Betreiben eines Kraftfahrzeugs |
| US10281987B1 (en) | 2013-08-09 | 2019-05-07 | Leap Motion, Inc. | Systems and methods of free-space gestural interaction |
| US10846942B1 (en) | 2013-08-29 | 2020-11-24 | Ultrahaptics IP Two Limited | Predictive information for free space gesture control and communication |
| US9582737B2 (en) * | 2013-09-13 | 2017-02-28 | Qualcomm Incorporated | Context-sensitive gesture classification |
| US9159115B1 (en) * | 2013-09-30 | 2015-10-13 | Emc Corporation | Processing vectorized elements associated with IT system images |
| US9632572B2 (en) | 2013-10-03 | 2017-04-25 | Leap Motion, Inc. | Enhanced field of view to augment three-dimensional (3D) sensory space for free-space gesture interpretation |
| US10152136B2 (en) | 2013-10-16 | 2018-12-11 | Leap Motion, Inc. | Velocity field interaction for free space gesture interface and control |
| US10168873B1 (en) | 2013-10-29 | 2019-01-01 | Leap Motion, Inc. | Virtual interactions for machine control |
| US9996638B1 (en) | 2013-10-31 | 2018-06-12 | Leap Motion, Inc. | Predictive information for free space gesture control and communication |
| US9996797B1 (en) | 2013-10-31 | 2018-06-12 | Leap Motion, Inc. | Interactions with virtual objects for machine control |
| US9740296B2 (en) * | 2013-12-16 | 2017-08-22 | Leap Motion, Inc. | User-defined virtual interaction space and manipulation of virtual cameras in the interaction space |
| WO2015098810A1 (ja) * | 2013-12-27 | 2015-07-02 | 京セラドキュメントソリューションズ株式会社 | 画像処理装置および特定図形検出方法 |
| US20150199592A1 (en) * | 2014-01-14 | 2015-07-16 | Microsoft Corporation | Contour-based classification of objects |
| US9613262B2 (en) | 2014-01-15 | 2017-04-04 | Leap Motion, Inc. | Object detection and tracking for providing a virtual device experience |
| US9767609B2 (en) | 2014-02-12 | 2017-09-19 | Microsoft Technology Licensing, Llc | Motion modeling in visual tracking |
| US9679197B1 (en) | 2014-03-13 | 2017-06-13 | Leap Motion, Inc. | Biometric aware object detection and tracking |
| US9785247B1 (en) | 2014-05-14 | 2017-10-10 | Leap Motion, Inc. | Systems and methods of tracking moving hands and recognizing gestural interactions |
| US9741169B1 (en) | 2014-05-20 | 2017-08-22 | Leap Motion, Inc. | Wearable augmented reality devices with object detection and tracking |
| US9400924B2 (en) | 2014-05-23 | 2016-07-26 | Industrial Technology Research Institute | Object recognition method and object recognition apparatus using the same |
| JP2016038889A (ja) | 2014-08-08 | 2016-03-22 | リープ モーション, インコーポレーテッドLeap Motion, Inc. | モーション感知を伴う拡張現実 |
| US9746929B2 (en) | 2014-10-29 | 2017-08-29 | Qualcomm Incorporated | Gesture recognition using gesture elements |
| US10552750B1 (en) | 2014-12-23 | 2020-02-04 | Amazon Technologies, Inc. | Disambiguating between multiple users |
| US10438277B1 (en) | 2014-12-23 | 2019-10-08 | Amazon Technologies, Inc. | Determining an item involved in an event |
| US10475185B1 (en) | 2014-12-23 | 2019-11-12 | Amazon Technologies, Inc. | Associating a user with an event |
| US10656720B1 (en) | 2015-01-16 | 2020-05-19 | Ultrahaptics IP Two Limited | Mode switching for integrated gestural interaction and multi-user collaboration in immersive virtual reality environments |
| US10429923B1 (en) | 2015-02-13 | 2019-10-01 | Ultrahaptics IP Two Limited | Interaction engine for creating a realistic experience in virtual reality/augmented reality environments |
| US9696795B2 (en) | 2015-02-13 | 2017-07-04 | Leap Motion, Inc. | Systems and methods of creating a realistic grab experience in virtual reality/augmented reality environments |
| CN104899600B (zh) * | 2015-05-28 | 2018-07-17 | 北京工业大学 | 一种基于深度图的手部特征点检测方法 |
| US10599919B2 (en) * | 2015-12-31 | 2020-03-24 | Microsoft Technology Licensing, Llc | Detection of hand gestures using gesture language discrete values |
| US10310618B2 (en) | 2015-12-31 | 2019-06-04 | Microsoft Technology Licensing, Llc | Gestures visual builder tool |
| US10599324B2 (en) * | 2015-12-31 | 2020-03-24 | Microsoft Technology Licensing, Llc | Hand gesture API using finite state machine and gesture language discrete values |
| DE102016100075A1 (de) | 2016-01-04 | 2017-07-06 | Volkswagen Aktiengesellschaft | Verfahren zur Auswertung von Gesten |
| CN105740882A (zh) * | 2016-01-22 | 2016-07-06 | 苏州大学 | 一种基于多尺度不变量描述的目标识别方法及装置 |
| US10026014B2 (en) * | 2016-10-26 | 2018-07-17 | Nxp Usa, Inc. | Method and apparatus for data set classification based on generator features |
| KR101883228B1 (ko) * | 2017-02-16 | 2018-07-30 | (주)더블유알티랩 | 제스처 인식 방법 및 장치 |
| US11290518B2 (en) * | 2017-09-27 | 2022-03-29 | Qualcomm Incorporated | Wireless control of remote devices through intention codes over a wireless connection |
| CN107678551B (zh) * | 2017-10-19 | 2021-12-28 | 京东方科技集团股份有限公司 | 手势识别方法和装置、电子设备 |
| US20190156270A1 (en) | 2017-11-18 | 2019-05-23 | Walmart Apollo, Llc | Distributed Sensor System and Method for Inventory Management and Predictive Replenishment |
| CN107944960A (zh) * | 2017-11-27 | 2018-04-20 | 深圳码隆科技有限公司 | 一种无人售货方法和设备 |
| CN108647597B (zh) * | 2018-04-27 | 2021-02-02 | 京东方科技集团股份有限公司 | 一种手腕识别方法、手势识别方法、装置和电子设备 |
| US11875012B2 (en) | 2018-05-25 | 2024-01-16 | Ultrahaptics IP Two Limited | Throwable interface for augmented reality and virtual reality environments |
| CN111435429B (zh) * | 2019-01-15 | 2024-03-01 | 北京伟景智能科技有限公司 | 一种基于双目立体数据动态认知的手势识别方法及系统 |
| SE542978C2 (en) | 2019-03-20 | 2020-09-22 | Manomotion Ab | A method and device for recognizing a gesture in real-time |
| US11709252B2 (en) * | 2019-08-21 | 2023-07-25 | Arm Limited | Topological model generation |
| US11188145B2 (en) * | 2019-09-13 | 2021-11-30 | DTEN, Inc. | Gesture control systems |
| JP2021096652A (ja) * | 2019-12-17 | 2021-06-24 | 富士通株式会社 | 画像識別装置、方法、及びプログラム |
| CN113515981A (zh) | 2020-05-22 | 2021-10-19 | 阿里巴巴集团控股有限公司 | 识别方法、装置、设备和存储介质 |
| CN113392847B (zh) * | 2021-06-17 | 2023-12-05 | 拉萨搻若文化艺术产业开发有限公司 | 一种藏汉英三语ocr手持扫描翻译装置及翻译方法 |
| CN114067136B (zh) * | 2021-10-13 | 2026-04-24 | 原力图新(重庆)科技有限公司 | 图像匹配方法、装置、电子设备、存储介质及相关产品 |
| CN114898457B (zh) * | 2022-04-11 | 2024-06-28 | 厦门瑞为信息技术有限公司 | 一种基于手部关键点和transformer的动态手势识别方法和系统 |
| DE102022205181A1 (de) * | 2022-05-24 | 2023-11-30 | Ibak Helmut Hunger Gmbh & Co Kg | Kanalrohrinspektionssystem sowie Verfahren zur Steuerung eines Kanalrohrinspektionssystems |
| CN117373114B (zh) * | 2023-09-19 | 2024-07-02 | 海智合芯科技(深圳)有限公司 | 基于跟拍图像的手势识别方法、系统、装置及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001056861A (ja) * | 1999-06-08 | 2001-02-27 | Matsushita Electric Ind Co Ltd | 手の形状と姿勢の認識装置および手の形状と姿勢の認識方法並びに当該方法を実施するプログラムを記録した記録媒体 |
| JP2003131785A (ja) * | 2001-10-22 | 2003-05-09 | Toshiba Corp | インタフェース装置および操作制御方法およびプログラム製品 |
| JP2003216931A (ja) * | 2002-01-28 | 2003-07-31 | Matsushita Electric Works Ltd | 特定パターン認識方法、特定パターン認識プログラム、特定パターン認識プログラム記録媒体および特定パターン認識装置 |
| US6788809B1 (en) * | 2000-06-30 | 2004-09-07 | Intel Corporation | System and method for gesture recognition in three dimensions using stereo imaging and color vision |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5548667A (en) * | 1991-05-24 | 1996-08-20 | Sony Corporation | Image processing system and method thereof in which three dimensional shape is reproduced from two dimensional image data |
| US6147678A (en) * | 1998-12-09 | 2000-11-14 | Lucent Technologies Inc. | Video hand image-three-dimensional computer interface with multiple degrees of freedom |
| JP4377665B2 (ja) | 2003-12-01 | 2009-12-02 | 本田技研工業株式会社 | 位置検出用マーク、並びに、マーク検出装置、その方法及びそのプログラム |
| JP4708422B2 (ja) * | 2004-04-15 | 2011-06-22 | ジェスチャー テック,インコーポレイテッド | 両手動作の追跡 |
| JP4637618B2 (ja) | 2005-03-18 | 2011-02-23 | 株式会社ホンダエレシス | 車線認識装置 |
-
2008
- 2008-10-23 DE DE102008052928A patent/DE102008052928A1/de not_active Withdrawn
-
2009
- 2009-10-21 JP JP2011532533A patent/JP5303652B2/ja not_active Expired - Fee Related
- 2009-10-21 WO PCT/EP2009/007547 patent/WO2010046101A1/de not_active Ceased
- 2009-10-21 EP EP09744627.2A patent/EP2344980B1/de not_active Not-in-force
-
2011
- 2011-04-22 US US13/092,184 patent/US8570383B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001056861A (ja) * | 1999-06-08 | 2001-02-27 | Matsushita Electric Ind Co Ltd | 手の形状と姿勢の認識装置および手の形状と姿勢の認識方法並びに当該方法を実施するプログラムを記録した記録媒体 |
| US6788809B1 (en) * | 2000-06-30 | 2004-09-07 | Intel Corporation | System and method for gesture recognition in three dimensions using stereo imaging and color vision |
| JP2003131785A (ja) * | 2001-10-22 | 2003-05-09 | Toshiba Corp | インタフェース装置および操作制御方法およびプログラム製品 |
| JP2003216931A (ja) * | 2002-01-28 | 2003-07-31 | Matsushita Electric Works Ltd | 特定パターン認識方法、特定パターン認識プログラム、特定パターン認識プログラム記録媒体および特定パターン認識装置 |
Non-Patent Citations (4)
| Title |
|---|
| KERDVIBULVECH: "Vision-Based Detection of Guitar Players' Fingertips Without Markers", COMPUTER GRAPHICS, IMAGING AND VISUALISATION, 2007. CGIV '07, JPN6012043696, 14 August 2007 (2007-08-14), ISSN: 0002308768 * |
| KIERKEGAARD P: "A METHOD FOR DETECTION OF CIRCULAR ARCS BASED ON THE HOUGH TRANSFORM", MACHINE VISION AND APPLICATIONS, vol. V1992 N5, JPN5012002786, 1992, pages 249 - 263, ISSN: 0002308770 * |
| MUNIB: "AMERICAN SIGN LANGUAGE (ASL) RECOGNITION BASED ON HOUGH TRANSFORM AND NEURAL NETWORKS", EXPERT SYSTEMS WITH APPLICATIONS, vol. V32 N1, JPN5012002782, 1 January 2007 (2007-01-01), GB, pages 24 - 37, ISSN: 0002308767 * |
| SAFAEE-RAD R: "APPLICATION OF MOMENT AND FOURIER DESCRIPTORS TO THE ACCURATE ESTIMATION 以下備考", SPEECH PROCESSING 1, JPN5012002785, 14 April 1991 (1991-04-14), US, pages 2465 - 2468, XP010043505, ISSN: 0002308769, DOI: 10.1109/ICASSP.1991.150900 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160129000A (ko) * | 2014-01-05 | 2016-11-08 | 마노모션 에이비 | 모바일 디바이스를 위한 실시간 3d 제스처 인식 및 트랙킹 시스템 |
| JP2017505965A (ja) * | 2014-01-05 | 2017-02-23 | マノモーション アーベー | モバイル機器用三次元ジェスチャのリアルタイム認識及び追跡システム |
| KR102285915B1 (ko) * | 2014-01-05 | 2021-08-03 | 마노모션 에이비 | 모바일 디바이스를 위한 실시간 3d 제스처 인식 및 트랙킹 시스템 |
| KR101743249B1 (ko) | 2016-05-26 | 2017-06-07 | 한국과학기술원 | 엄지 손가락의 움직임을 파악하기 위해 센서를 부착할 기준 벡터를 선정하는 방법, 장치 및 프로그램 |
| JP2022507635A (ja) * | 2019-06-19 | 2022-01-18 | シャンハイ センスタイム インテリジェント テクノロジー カンパニー リミテッド | インテリジェント車両の運動制御方法および装置、機器並びに記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2344980B1 (de) | 2013-12-18 |
| US20110234840A1 (en) | 2011-09-29 |
| US8570383B2 (en) | 2013-10-29 |
| JP5303652B2 (ja) | 2013-10-02 |
| WO2010046101A1 (de) | 2010-04-29 |
| EP2344980A1 (de) | 2011-07-20 |
| DE102008052928A1 (de) | 2010-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5303652B2 (ja) | 画像内のジェスチャを認識するための装置、方法およびコンピュータ・プログラムと、デバイスを制御するための装置、方法およびコンピュータ・プログラム | |
| Gurav et al. | Real time finger tracking and contour detection for gesture recognition using OpenCV | |
| JP5598751B2 (ja) | 動作認識装置 | |
| WO2010099034A1 (en) | Capturing and recognizing hand postures using inner distance shape contexts | |
| Vishwakarma et al. | An efficient interpretation of hand gestures to control smart interactive television | |
| Itkarkar et al. | A survey of 2D and 3D imaging used in hand gesture recognition for human-computer interaction (HCI) | |
| Liang et al. | Hand gesture recognition using view projection from point cloud | |
| Chanthaphan et al. | Facial emotion recognition based on facial motion stream generated by kinect | |
| Patel et al. | A survey on hand gesture recognition techniques, methods and tools | |
| Ben Jmaa et al. | A new approach for hand gestures recognition based on depth map captured by rgb-d camera | |
| Sultana et al. | Vision based gesture recognition for alphabetical hand gestures using the SVM classifier | |
| Lei et al. | An investigation of applications of hand gestures recognition in industrial robots | |
| Zhang et al. | Adaptive face recognition for low-cost, embedded human-robot interaction | |
| Ke et al. | Real-time hand gesture recognition for service robot | |
| Panduranga et al. | Dynamic hand gesture recognition system: a short survey | |
| CN118397651A (zh) | 一种自定义静态手势识别判定方法及系统 | |
| Raza et al. | An integrative approach to robust hand detection using CPM-YOLOv3 and RGBD camera in real time | |
| Heer et al. | An improved hand gesture recognition system based on optimized msvm and sift feature extraction algorithm | |
| Johnston et al. | Sketch recognition of digital logical circuits | |
| Gu et al. | Natural hand posture recognition based on Zernike moments and hierarchical classifier | |
| Rusu et al. | Human action recognition using global point feature histograms and action shapes | |
| Kakade et al. | Dynamic hand gesture recognition: a literature review | |
| Gurav et al. | Vision based hand gesture recognition with haar classifier and AdaBoost algorithm | |
| Hasan | New Rotation Invariance Features Based on Circle Partitioning | |
| Patil et al. | Hand Gesture Recognition for MP3 Player using Image Processing Technique and PIC16F8779. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121115 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5303652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |