以下に添付図面を参照し、本発明の実施の形態にかかる空気調和装置について説明する。なお、以下に示す実施の形態により本発明が限定されるものではない。
実施の形態1.
図1は、実施の形態1にかかる空気調和装置の一構成例を示す図である。図1に示すように、実施の形態1にかかる空気調和装置は、圧縮機1、四方弁2、室外熱交換器3、膨張弁4、および室内熱交換器5が冷媒配管6を介して接続され構成された冷媒回路100と、各スイッチング素子16a〜16fがブリッジ結線され構成されたインバータ9と、インバータ9の電源電圧である直流母線電圧Vdcを検出する母線電圧検出手段10と、インバータ9を駆動制御するインバータ制御手段11とを備えている。また、圧縮機1、室外熱交換器3、および外気の温度を計測する各温度センサ17a,17b,17cを備えている。
圧縮機1の内部には、冷媒を圧縮する圧縮機構7と、圧縮機構7を動作させるモータ8とを備えている。なお、冷媒回路100を構成する各構成部のうち、圧縮機1、四方弁2、室外熱交換器3、および膨張弁4は、室外機(図示せず)内部に格納され、室内熱交換器5は、室内機(図示せず)内部に格納される。
インバータ制御手段11は、運転待機時において、あらかじめ定めた所定の起動判定時点で、圧縮機1への冷媒寝込み現象を検出する冷媒寝込み判定手段12と、モータ8の各相巻線に印加する電圧の指令値である各相電圧指令信号Vu*,Vv*,Vw*を生成する交流電圧発生手段13と、インバータ制御手段11の外部から入力された回転数指令値ω*を積分して電圧位相指令値θを出力する積分器14と、各相電圧指令信号Vu*,Vv*,Vw*に基づいて各スイッチング素子16a〜16fを駆動する各PWM信号UP,VP,WP,UN,VN,WNを生成するPWM信号生成手段15とを備えている。なお、インバータ制御手段11内の各構成部は、マイクロコンピュータやDSP上で実行される制御プログラムとして構成することができる。
ここで、実施の形態1にかかる空気調和装置の通常運転モードにおける動作について、図1および図2を参照して説明する。図2は、実施の形態1にかかる空気調和装置におけるPWM信号生成手段の入出力波形の一例を示す図である。
通常運転モード時において、交流電圧発生手段13は、積分器14から入力された電圧位相指令値θおよびインバータ制御手段11の外部から入力された振幅指令値Aに基づいて、各相電圧指令信号Vu*,Vv*,Vw*を生成して出力する。各相電圧指令値Vu*,Vv*,Vw*は、例えば、それぞれ下記(1),(2),(3)式を用いて算出することができる。なお、各相電圧指令値Vu*,Vv*,Vw*は、例えば、二相変調、三次高調波重畳変調、空間ベクトル変調等を用いて算出してもよい。
Vu*=Acosθ …(1)
Vv*=Acos[θ−2π/3] …(2)
Vw*=Acos[θ+2π/3] …(3)
PWM信号生成手段15は、母線電圧検出手段10から入力された直流母線電圧Vdcの半値を振幅値とする所定周波数のキャリア信号を生成し、そのキャリア信号と交流電圧発生手段13から入力された各相電圧指令信号Vu*,Vv*,Vw*とを比較して、各PWM信号UP,VP,WP,UN,VN,WNを生成する。なお、各PWM信号UP,VP,WP,UN,VN,WNの生成手法により本発明が限定されるものではない。
インバータ9は、PWM信号UPによりスイッチング素子16aが駆動され、PWM信号UNによりスイッチング素子16dが駆動され、モータ8のU相巻線に電力を供給する。また、PWM信号VPによりスイッチング素子16bが駆動され、PWM信号VNによりスイッチング素子16eが駆動され、モータ8のV相巻線に電力を供給する。また、PWM信号WPによりスイッチング素子16cが駆動され、PWM信号WNによりスイッチング素子16fが駆動され、モータ8のW相巻線に電力を供給する。
実施の形態1にかかる空気調和装置の通常運転モードとしては、冷房運転モードと暖房運転モードとがある。冷房運転モードでは、四方弁2が図1に破線で示す状態に切り換えられると共に、膨張弁4が所定開度に調節され、室外熱交換器3および室内熱交換器5が運転される。冷媒回路100は、この状態でモータ8が駆動され圧縮機構7が動作し、冷媒を破線矢印方向に循環させることによって冷房運転モードにおける冷凍サイクルを行う。
また、暖房運転モードでは、四方弁2が図1に実線で示す状態に切り換えられると共に、膨張弁4が所定開度に調節され、室外熱交換器3および室内熱交換器5が運転される。冷媒回路100は、この状態でモータ8が駆動され圧縮機構7が動作し、冷媒を実線矢印方向に循環させることによって暖房運転モードにおける冷凍サイクルを行う。
つぎに、実施の形態1にかかる空気調和装置の停止中あるいは運転待機中における圧縮機1内部への冷媒寝込み現象検出時の冷媒加熱動作について、図1および図2を参照して説明する。なお、圧縮機1内部への冷媒寝込み判定および冷媒加熱動作の実施タイミングについては後述する。
ここでは、まず、実施の形態1にかかる空気調和装置の冷媒加熱動作の概略について説明する。空気調和装置の停止中あるいは運転待機中において、冷媒回路100内の冷媒は、冷媒回路100を構成する各構成部のうち、最も温度の低い箇所で凝縮して溜まり込んでゆく。このため、場合によっては、圧縮機1の内部に冷媒が溜まり込んでいくことになる。
一方、圧縮機1には、その内部に潤滑油が貯留されている。圧縮機1の運転中には、圧縮機1内部に貯留された潤滑油が圧縮機構7へ供給されて潤滑に利用される。圧縮機1の停止中に圧縮機1内部へ冷媒が溜まり込むと、冷媒が潤滑油に溶け込んで潤滑油の粘度が低下する。この状態で圧縮機1を起動すると、粘度の低い潤滑油が圧縮機構7へ供給されることになり、焼き付き等のトラブルを招くおそれがある。また、潤滑油に溶け込んでいた冷媒が急激に蒸発し、潤滑油が泡立った状態となって圧縮機構7へ充分な量の潤滑油が供給されなくなるおそれもある。
そこで、実施の形態1にかかる空気調和装置では、空気調和装置の停止中あるいは運転待機中において、圧縮機1への冷媒寝込み現象を検出した場合には、通常運転モードにおける動作周波数(例えば、1kHz未満)よりも高く、モータ8を駆動する回転トルクや不要振動が発生しない高周波数でインバ−タ9内の各スイッチング素子16a〜16fを駆動する冷媒加熱動作を行う。この冷媒加熱動作により、モータ8では、各相巻線に供給された電力の大半がモータ8の鉄心で発生する鉄損および各相巻線で発生する銅損により熱となって消費され、圧縮機1の温度が上昇し、これに伴い圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出する。その結果、空気調和装置の停止中あるいは運転待機中に潤滑油に溶け込む冷媒の量が減少し、潤滑油の粘度低下が抑制される。
つぎに、実施の形態1にかかる空気調和装置の冷媒加熱動作における各構成部の動作について説明する。
冷媒寝込み判定手段12は、圧縮機1への冷媒寝込み現象を検出した場合には、上述した通常運転モードにおける回転数指令値ω*および振幅指令値Aとは異なる回転数指令値ω*’および振幅指令値A’を生成し、生成した回転数指令値ω*’ を積分して電圧位相指令値θ’を生成し、振幅指令値A’と共に出力する。
交流電圧発生手段13は、冷媒寝込み判定手段12から入力された電圧位相指令値θ’および振幅指令値A’に基づいて、通常運転時よりも高い周波数の各相電圧指令信号Vu*,Vv*,Vw*を生成して出力する。各相電圧指令値Vu*,Vv*,Vw*の算出は、通常動作モード時と同様に、上述した(1),(2),(3)式、あるいは、二相変調、三次高調波重畳変調、空間ベクトル変調等を用いて行う。
PWM信号生成手段15は、通常動作モード時と同様の処理を行い、各PWM信号UP,VP,WP,UN,VN,WNを生成する。
インバータ9は、各PWM信号UP,VP,WP,UN,VN,WNにより各スイッチング素子16a〜16fが駆動され、モータ8の各相巻線に電力を供給する。ここで、冷媒加熱動作時には、上述したように、通常運転モードにおける動作周波数(例えば、1kHz未満)よりも高く、モータ8を駆動する回転トルクや不要振動が発生しない高周波数で各スイッチング素子16a〜16fが駆動される。このため、モータ8では、各相巻線に供給された電力の大半がモータ8の鉄心で発生する鉄損および各相巻線で発生する銅損により熱となって消費される。この結果、圧縮機1の温度が上昇し、これに伴い圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出する。
このように、モータ8を駆動する回転トルクや不要振動が発生しない高周波数で各スイッチング素子16a〜16fを駆動することにより、各相巻線に供給された電力の大半がモータ8の鉄心で発生する鉄損および各相巻線で発生する銅損により熱となって消費される。つまり、各相巻線に供給された電力を効率良く熱に変換することができる。
つぎに、圧縮機1内部への冷媒寝込み現象を検出する冷媒寝込み判定手段12の冷媒寝込み判定動作について、図3および図4を参照して説明する。図3は、実施の形態1にかかる空気調和装置の冷媒寝込み判定手段の内部構成の一例を示す図である。また、図4は、実施の形態1にかかる空気調和装置の冷媒寝込み判定手段の内部構成の一変形例を示す図である。
図3に示す例では、温度センサー17cにより検出された外気の温度変化に基づいて、圧縮機1内部への冷媒寝込み現象が発生し得る可能性が高い状態(以下、単に「冷媒寝込み状態」という)であるか否かを判定する場合の冷媒寝込み判定手段12の内部構成を示している。この場合、冷媒寝込み判定手段12は、所定の単位時間前の外気温度を出力する遅延器22と、外気温度から所定の単位時間前の外気温度を減算した外気の温度変化を出力する減算器21と、減算器21の出力結果である温度変化を所定の基準値(例えば、ここでは”0”)と比較して冷媒寝込み検出信号を出力する比較器23とを備える。なお、温度センサ17cにより検出される外気の温度変化に代えて、室外機(図示せず)に格納される圧縮機1や室外熱交換器3等の冷媒回路100の温度を各温度センサ17a,17bにより検出し、圧縮機1や室外熱交換器3等の冷媒回路100の温度変化に基づいて、冷媒寝込み状態であるか否かを判定するようにしてもよい。
上述したように、空気調和装置の停止中あるいは運転待機中において、冷媒回路100内の冷媒は、冷媒回路100を構成する各構成部のうち、最も温度の低い箇所で凝縮して溜まり込んでいく。一般に、圧縮機1と室外熱交換器3とでは、圧縮機1の方が熱容量が大きい。このため、上述した温度変化が正、つまり、温度が上昇している間は、熱容量が大きい圧縮機1の温度は、室外熱交換器3の温度に遅れて上昇していく。つまり、温度変化が正である場合には、圧縮機1の方が室外熱交換器3よりも温度が低い状態であるといえる。したがって、この場合には、冷媒寝込み状態であると判断することができる。
一方、温度変化が負、つまり、温度が下降している間は、熱容量が大きい圧縮機1の温度は、室外熱交換器3の温度に遅れて下降していく。つまり、温度変化が負である場合には、圧縮機1の方が室外熱交換器3よりも温度が高い状態であるといえる。したがって、この場合には、室外熱交換器3への冷媒寝込み現象が発生し易く、圧縮機1内部へ溜まり込む冷媒の量は少ないと判断することができる。
したがって、図3に示す例では、上述した温度変化、つまり、減算器21の出力が正である場合には、冷媒寝込み状態であると判断する。
図4では、外気温度と圧縮機1の温度との温度差に基づいて、冷媒寝込み状態であるか否かを判定する例を示している。この場合、冷媒寝込み判定手段12は、温度センサー17cにより検出された外気温度から温度センサー17aにより検出された圧縮機1の温度を減算した温度差を出力する減算器21と、減算器21の出力結果である外気温度と圧縮機1の温度との温度差を所定の基準値(例えば、ここでは”0”)と比較して冷媒寝込み検出信号を出力する比較器23とを備える。なお、温度センサ17cにより検出される外気温度に代えて、室外機(図示せず)に格納される室外熱交換器3の温度を温度センサ17bにより検出して、室外熱交換器3の温度と圧縮機1の温度との温度差に基づいて、冷媒寝込み状態であるか否かを判定するようにしてもよい。
室外熱交換器3は、上述したように圧縮機1よりも熱容量が小さく、室外熱交換器3の温度は外気の温度変化によく追従して変化するが、圧縮機1の温度は、外気の温度変化よりも遅れて変化する。したがって、外気あるいは室外熱交換器3の温度が圧縮機1の温度よりも高い場合には、冷媒寝込み状態であると判断することができる。
したがって、図4に示す例では、外気あるいは室外熱交換器3の温度から圧縮機1の温度を差し引いた温度差、つまり、減算器21の出力が正である場合には、冷媒寝込み状態であると判断する。
なお、図4に示した例では、外気温度と圧縮機1の温度との温度差を、冷媒加熱動作を実施する際に生成する振幅指令値A’に反映するようにすることも可能である。この場合には、例えば、外気温度と圧縮機1の温度との温度差と、振幅指令値A’との関係をあらかじめテーブル化して冷媒寝込み判定手段12に保持しておき、減算器21から出力された温度差に対応する振幅指令値A’をテーブルから読み出して冷媒寝込み判定手段12が出力するようにすればよい。
つぎに、冷媒加熱動作の実施タイミングについて説明する。実施の形態1にかかる冷媒寝込み判定手段12は、運転待機時において、あらかじめ定めた所定の起動判定時点で、冷媒寝込み状態であるか否かを判定する。ここでは、まず、ユーザ操作による運転動作指令により起動判定を行い、運転動作指令が入力された時点で、冷媒寝込み状態であるか否かを判定し、冷媒寝込み状態であると判定した場合に、冷媒加熱動作を実施する例について説明する。なお、この運転動作指令は、例えば、ユーザがリモコン(図示せず)を操作して空気調和器の運転動作をオンすることにより、図示しない主制御手段から出力される。
冷媒寝込み判定手段12は、運転動作指令が入力された時点で、冷媒寝込み状態であるか否かを判定し、冷媒寝込み状態であれば、回転数指令値ω*’および振幅指令値A’を生成し、生成した回転数指令値ω*’を積分して電圧位相指令値θ’を生成し、電圧位相指令値θ’および振幅指令値A’を交流電圧発生手段13に出力する。これにより、後段の交流電圧発生手段13、PWM信号生成手段15、インバータ9、およびモータ8により、上述した冷媒加熱動作が実施される。このようにすれば、運転動作指令が入力された時点で冷媒寝込み状態である場合に、冷媒加熱動作を実施するようにすることができる。
また、本実施の形態における冷媒加熱動作の実施タイミングの別の態様としては、例えばリモコンに設けられた加速度センサ等を用いて、空気調和装置の待機時において、ユーザがリモコン(図示せず)を操作して空気調和器の運転動作をオンすることにより運転動作指令が出力される前に、ユーザがリモコンを持ったこと(つまり、運転動作指令の事前動作)を検出し、その検出信号(事前動作検出信号)に基づいて、冷媒加熱動作を実施するようにすることも可能である。ここでは、事前動作検出信号により起動判定を行い、事前動作検出信号が入力された時点で、冷媒寝込み状態であるか否かを判定し、冷媒寝込み状態であると判定した場合に、冷媒加熱動作を実施する例について説明する。なお、この事前動作検出信号は、例えば、ユーザがリモコンを持ったことを検出した際に、図示しない主制御手段から出力される。このようにすれば、ユーザがリモコンを持ったことを検出した時点で冷媒寝込み状態である場合に、冷媒加熱動作を実施することができるので、ユーザが実際にリモコンを操作して空気調和器の運転動作をオンしてから通常動作モードに移行するまでの時間を短縮することができる。なお、リモコンに設けられた加速度センサの検出信号(事前動作検出信号)は、例えば、リモコンが傾けられた場合や振られた場合など、ユーザがリモコンを操作する際に想定される動作に限定して出力するようにしてもよい。
つぎに、実施の形態1にかかる空気調和装置の冷媒加熱動作処理について、図1〜図6を参照して説明する。図5は、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一例を示すフローチャートである。また、図6は、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一変形例を示すフローチャートである。ここでは、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一例として、空気調和装置の待機時において、ユーザ操作による空気調和装置の運転動作指令に基づいて、冷媒加熱動作を実施する例について説明し(図5参照)、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一変形例として、リモコンに備えられた加速度センサを用いて、空気調和装置の待機時において、ユーザがリモコンを持ったこと(運転動作指令の事前動作)を検出し、その検出信号(事前動作検出信号)に基づいて、冷媒加熱動作を実施する例について説明する(図6参照)。
まず、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一例について、図5を参照して説明する。空気調和装置の待機時において、冷媒寝込み判定手段12は、運転動作指令の入力有無を判定する(ステップST101)。運転動作指令が入力されていなければ(ステップST101;No)、運転動作指令が入力されるまで待機し、運転動作指令が入力された時点で(ステップST101;Yes)、冷媒寝込み判定を実施して、冷媒寝込み状態であるか否かを判定する(ステップST102)。
冷媒寝込み状態でなければ(ステップST102;No)、空気調和装置は、通常動作モードに移行して(ステップST106)、処理を終了する。
冷媒寝込み状態であれば(ステップST102;Yes)、冷媒寝込み判定手段12は、あらかじめ設定した所定の冷媒加熱時間のカウントを開始すると共に、電圧位相指令値θ’および振幅指令値A’を生成して出力する。これにより、冷媒加熱動作が開始される(ステップST103)。
冷媒寝込み判定手段12は、電圧位相指令値θ’および振幅指令値A’の出力を開始してから、所定の冷媒加熱時間が経過したか否かを判定する(ステップST104)。所定の冷媒加熱時間が経過していなければ(ステップST104;No)、所定の冷媒加熱時間が経過するまで電圧位相指令値θ’および振幅指令値A’を出力し続け、所定の冷媒加熱時間が経過した時点で(ステップST104;Yes)、圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出したものと判定して、電圧位相指令値θ’および振幅指令値A’の出力を停止する。これにより、冷媒加熱動作が停止し(ステップST105)、空気調和装置は、通常動作モードに移行して(ステップST106)、処理を終了する。
つぎに、実施の形態1にかかる空気調和装置の冷媒加熱動作処理の一変形例について、図6を参照して説明する。空気調和装置の待機時において、冷媒寝込み判定手段12は、リモコンに設けられた加速度センサの検出信号(事前動作検出信号)の入力有無を判定する(ステップST201)。冷媒寝込み判定手段12は、加速度センサの検出信号(事前動作検出信号)が入力されていなければ(ステップST201;No)、加速度センサの検出信号(事前動作検出信号)が入力されるまで待機し、加速度センサの検出信号(事前動作検出信号)が入力された時点で(ステップST201;Yes)、あらかじめ設定された所定の入力待機時間のカウントを開始すると共に、冷媒寝込み判定を実施して、冷媒寝込み状態であるか否かを判定する(ステップST202)。
冷媒寝込み状態でなければ(ステップST202;No)、冷媒寝込み判定手段12は、運転動作指令の入力有無を判定し(ステップST203)、運転動作指令が入力されていなければ(ステップST203;No)、所定の入力待機時間が経過したか否かを判定する(ステップST204)。
所定の入力待機時間が経過していれば(ステップST204;Yes)、ステップST201の処理に戻る。所定の入力待機時間が経過していなければ(ステップST204;No)、ステップST203の処理に戻る。運転動作指令が入力されていれば(ステップST203;Yes)、空気調和装置は、通常動作モードに移行して(ステップST205)、処理を終了する。
冷媒寝込み状態であれば(ステップST202;Yes)、冷媒寝込み判定手段12は、あらかじめ設定した所定の冷媒加熱時間のカウントを開始すると共に、電圧位相指令値θ’および振幅指令値A’を生成して出力する。これにより、冷媒加熱動作が開始される(ステップST206)。
冷媒寝込み判定手段12は、電圧位相指令値θ’および振幅指令値A’の出力を開始してから、所定の冷媒加熱時間が経過したか否かを判定する(ステップST207)。所定の冷媒加熱時間が経過していなければ(ステップST207;No)、所定の冷媒加熱時間が経過するまで電圧位相指令値θ’および振幅指令値A’を出力し続け、所定の冷媒加熱時間が経過した時点で(ステップST207;Yes)、圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出したものと判定して、電圧位相指令値θ’および振幅指令値A’の出力を停止する。これにより、冷媒加熱動作が停止する(ステップST208)。
続いて、冷媒寝込み判定手段12は、運転動作指令の入力有無を判定し(ステップST203)、運転動作指令が入力されていなければ(ステップST203;No)、所定の入力待機時間が経過したか否かを判定する(ステップST204)。
所定の入力待機時間が経過していれば(ステップST204;Yes)、ステップST201の処理に戻る。所定の入力待機時間が経過していなければ(ステップST204;No)、ステップST203の処理に戻る。運転動作指令が入力されていれば(ステップST203;Yes)、空気調和装置は、通常動作モードに移行して(ステップST205)、処理を終了する。
なお、上述した図5および図6に示すフローチャートでは、ステップST104およびステップST207において、所定の冷媒加熱時間が経過したか否かを判定して冷媒漏出判定を行うようにしたが、これに限らず、例えば、図3に示す例において説明した外気の温度変化、または、圧縮機1や室外熱交換器3等の冷媒回路100の温度変化を用いて、冷媒漏出判定を行うようにすることも可能であるし、また、例えば、図4に示す例において説明した外気温度と圧縮機1の温度との温度差、あるいは、室外熱交換器3の温度と圧縮機1の温度との温度差を用いて、冷媒漏出判定を行うようにすることも可能である。また、圧縮機1からの冷媒漏出量を検出可能である場合には、冷媒漏出量を直接検出して冷媒漏出判定を行うようにすることも可能である。
また、上述した図6に示すフローチャートのステップST203において、所定の入力待機時間が経過した後に(ステップST203;Yes)、一定期間を経てからリモコンに設けられた加速度センサの検出信号の入力有無判定(ステップST201)に移行するようにしてもよい。
以上説明したように、実施の形態1の空気調和装置によれば、圧縮機のモータを駆動する回転トルクや不要振動が発生しない高周波数でインバータの各スイッチング素子を駆動することにより、冷媒加熱動作を実施するようにしたので、各相巻線に供給された電力の大半がモータの鉄心で発生する鉄損および各相巻線で発生する銅損により熱となって消費されるため、各相巻線に供給された電力を効率良く熱に変換することができる。
また、圧縮機のモータを用いて冷媒加熱動作を実施するようにしたので、通常の圧縮機運転には不要なヒータ等を備える等のコスト上昇を招くことなく、圧縮機の起動時における冷媒寝込み現象を解消することができる。
また、運転動作指令により起動判定を行い、運転動作指令が入力された時点で、圧縮機内部への冷媒寝込み現象が発生し得る可能性が高い状態(冷媒寝込み状態)であるか否かを判定し、冷媒寝込み状態である場合に、冷媒加熱動作を実施するようにしたので、不要な待機電力の増加を招くことなく、圧縮機の起動時における冷媒寝込み現象を解消することができる。
また、リモコンに設けられた加速度センサ等を用いて、空気調和装置の待機時において、ユーザがリモコンを持ったこと(運転動作指令の事前動作検出信号)を検出し、その検出信号(事前動作検出信号)により起動判定を行い、事前動作検出信号が入力された時点で、冷媒寝込み状態であるか否かを判定し、冷媒寝込み状態である場合に、冷媒加熱動作を実施するようにしたので、ユーザが実際にリモコンを操作して空気調和器の運転動作をオンしてから通常動作モードに移行するまでの時間を短縮することができる。
また、リモコンに設けられた加速度センサ等を用いた場合には、冷媒加熱動作を実施後、所定の入力待機時間の経過後において運転動作指令が入力されない場合に、通常の待機状態に戻るようにしたので、無駄な電力の消費を抑制することができる。
実施の形態2.
実施の形態2にかかる空気調和装置の構成は、実施の形態1において説明した図1に示す構成と同一であるので、各構成部の詳細な説明は省略する。
実施の形態1では、ユーザ操作による運転動作指令、あるいは、リモコンに設けられた加速度センサの検出信号(事前動作検出信号)により起動判定を行い、運転動作指令が入力された時点、あるいは、事前動作検出信号が入力された時点で、圧縮機内部への冷媒寝込み現象が発生し得る可能性が高い状態(冷媒寝込み状態)であるか否かを判定し、その時点で冷媒寝込み状態であれば、冷媒加熱動作を実施するようにしたが、本実施の形態では、タイマ等によりあらかじめ起動時刻が設定され明確である場合、あるいは、次回の起動時刻が予測可能である場合に、起動予定時刻あるいは起動予想時刻よりも前の所定期間において起動判定を行い、所定期間内の任意時刻において、冷媒寝込み状態の判定および冷媒寝込み量の推定を行い、冷媒寝込み状態である場合に、推定した冷媒寝込み量に基づいて、冷媒寝込み現象の解消に必要な冷媒加熱出力および冷媒加熱時間を算出して、冷媒加熱動作を実施する例について説明する。
実施の形態2にかかる空気調和装置の通常運転モードにおける動作、冷媒寝込み状態検出時の冷媒加熱動作、および、冷媒寝込み判定手段12の冷媒寝込み判定動作については、実施の形態1において説明した動作と同様であるので、ここでは説明を省略する。
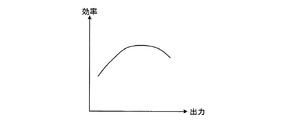
実施の形態2にかかる冷媒寝込み判定および冷媒寝込み量の推定、ならびに、冷媒寝込み現象の解消に必要な冷媒加熱出力および冷媒加熱時間の算出について、図7〜図11を参照して説明する。図7は、実施の形態2にかかる空気調和装置の冷媒寝込み判定手段の内部構成の一例を示す図である。また、図8は、空気調和装置の停止中における現在時刻から一定時間前(ここでは、24時間前)までの外気温度および外気の温度変化の一例を示す図である。また、図9は、冷媒加熱出力と冷媒加熱効率との関係の一例を示す図である。また、図10および図11は、実施の形態2にかかる空気調和装置の冷媒寝込み判定手段の内部構成の変形例を示す図である。
図7に示す例では、タイマ等によりあらかじめ起動時刻が設定され明確である場合、あるいは、次回の起動時刻が予測可能である場合に、起動予定時刻あるいは起動予測時刻よりも前の所定期間において起動判定を行い、所定期間内の任意時刻から一定期間前までの外気あるいは圧縮機1や室外熱交換器3等の冷媒回路100の温度変化の推移を記録すると共に、当該任意時刻までの冷媒寝込み継続期間に基づいて、圧縮機1内部への冷媒寝込み量の推定を行い、推定した冷媒寝込み量に基づいて、冷媒寝込み現象を解消するために要する冷媒加熱時間および冷媒加熱出力を算出すると共に、現在時刻から冷媒加熱時間が経過した時刻が起動予測時刻あるいは起動予測時刻以上となった時点における冷媒加熱時間および冷媒加熱出力に基づいて、振幅指令値および電圧位相指令値を算出して出力する場合の冷媒寝込み判定手段12の内部構成を示している。
図7に示す例において、実施の形態2にかかる冷媒寝込み判定手段12は、所定の単位時間前の外気温度を出力する遅延器22と、外気温度から所定の単位時間前の外気温度を減算した温度変化を出力する減算器21と、減算器21の出力結果である温度変化を記憶するメモリ41と、メモリ41に記憶された温度変化を所定の基準値(例えば、ここでは”0”)と逐次比較して、温度変化が正である期間、つまり、冷媒寝込み状態である冷媒寝込み継続期間を算出するカウンタ42と、起動予定時刻あるいは起動予測時刻よりも前の所定期間において起動判定を行い、冷媒寝込み判定を行うと共に、所定期間内の任意時刻から一定期間前までの冷媒寝込み継続期間に基づいて、冷媒寝込み量の推定値を求める冷媒寝込み量推定部43と、推定した冷媒寝込み量の解消に必要な熱量を求める熱量算出部44と、求めた熱量を生成するために必要な冷媒加熱出力および冷媒加熱時間を算出する出力・加熱時間算出部45とを備える。なお、外気の温度変化に代えて、室外機(図示せず)に格納される圧縮機1や室外熱交換器3等の冷媒回路100の温度を検出し、冷媒回路100の温度変化により、冷媒寝込み継続期間を算出するようにしてもよい。また、上述した冷媒寝込み量は、実際に圧縮機1内部に滞留した冷媒の物理量であってもよいし、物理量を相対的に置換した数値であってもよい。また、上述した冷媒寝込み量の解消に必要な熱量は、実際に冷媒寝込み量の解消に必要な熱の物理量であってもよいし、熱量を相対的に置換した数値であってもよい。
また、外気温度あるいは室外熱交換器3の温度と圧縮機1の温度との温度差の推移を記録して、冷媒寝込み量の推定を行うようにしてもよい。この場合には、減算器21を外気温度あるいは室外熱交換器3の温度から圧縮機1の温度を減算して温度差を出力するように構成すればよい。
ここで、実施の形態2にかかる冷媒寝込み判定手段12の各内部構成部の具体的な動作について説明する。
空気調和装置の実施の形態1においても説明したように、空気調和装置の停止中あるいは運転待機中において、冷媒回路100内の冷媒は、冷媒回路100を構成する各構成部のうち、最も温度の低い箇所で凝縮して溜まり込んでいく。一般に、圧縮機1と室外熱交換器3とでは、圧縮機1の方が熱容量が大きい。このため、図8に示すように、温度変化が正、つまり、温度が上昇している間は、熱容量が大きい圧縮機1の温度は、室外熱交換器3の温度に遅れて上昇していく。つまり、温度変化が正の場合には、圧縮機1の方が室外熱交換器3よりも温度が低く、冷媒寝込み状態であると判断することができる。
したがって、カウンタ42は、起動予定時刻あるいは起動予測時刻よりも前の所定期間内の任意時刻において、温度変化が正となった時点(図8中の時刻T1)、つまり、冷媒寝込み状態となった時点で、冷媒寝込み継続期間のカウントを開始し、温度変化が負となった時点(図8中の時刻T2)、つまり、圧縮機1内部への冷媒寝込み現象が発生し難い状態となった時点で、冷媒寝込み継続期間のカウントをリセットする。
冷媒寝込み量推定部43は、あらかじめ冷媒寝込み量と冷媒寝込み継続期間の長さとの関係を示すテーブルを保持しており、そのテーブルから、入力された冷媒寝込み継続期間の長さに対応する冷媒寝込み量の推定値を求める。
熱量算出部44は、あらかじめ圧縮機1内部への冷媒寝込み現象の解消に必要な熱量と冷媒寝込み量との関係を示すテーブルを保持しており、そのテーブルから、入力された冷媒寝込み量に対応する熱量を求める。
出力・加熱時間算出部45は、熱量算出部44から入力された熱量に加え、タイマ等により設定された起動予定時刻が入力され、起動予定時刻の前に冷媒加熱動作が終了するように、冷媒加熱出力および冷媒加熱時間を算出する。
さらに、図9に示す冷媒加熱出力と冷媒加熱効率との関係を示すテーブルを出力・加熱時間算出部45に保持しておき、起動時刻の前に冷媒加熱が終了する範囲内で、冷媒加熱効率が最大となるように、冷媒加熱出力および冷媒加熱時間を算出するようにすれば、より効率良く冷媒加熱動作を行うことができる。
また、本実施の形態における冷媒寝込み判定および冷媒寝込み量の推定、ならびに、冷媒寝込み現象の解消に必要な冷媒加熱出力および冷媒加熱時間の算出の別の態様として、図10および図11に示す例が考えられる。
図10に示す例では、外気あるいは圧縮機1や室外熱交換器3等の冷媒回路100の温度変化をメモリ41に記憶する際に、現在時刻から一定時間前(例えば、24時間前)における気象条件(例えば、外気温度)と現在時刻における気象条件とを比較して、その気象条件の差(例えば、外気温度差)に基づいて、温度変化を補正して記憶する例を示している。このようにすれば、より正確に冷媒加熱出力および冷媒加熱時間を算出することができる。また、外部からの通信やユーザ入力により気象条件を取得して、温度変化に反映させるようにしてもよい。
また、図11に示すように、外気温度あるいは圧縮機1や室外熱交換器3等の冷媒回路100の温度の検出値に代えて、外部からの通信やユーザ入力により取得した予想温度を減算器21および遅延器22に入力するようにしてもよい。
そして、冷媒寝込み判定手段12は、上述した図7、図10、図11に示す内部構成により求めた冷媒加熱出力に基づいて、回転数指令値ω*’および振幅指令値A’を生成し、生成した回転数指令値ω*’ を積分して電圧位相指令値θ’を生成し、振幅指令値A’と共に、冷媒加熱時間の間出力する。これにより、実施の形態1において説明した冷媒加熱動作が実施される。
つぎに、実施の形態2にかかる空気調和装置の冷媒加熱動作処理について、図1、図7〜図12を参照して説明する。図12は、実施の形態2にかかる空気調和装置の冷媒加熱動作処理の一例を示すフローチャートである。ここでは、実施の形態2にかかる空気調和装置の冷媒加熱動作処理の一例として、タイマ等によりあらかじめ起動時刻が設定され明確である場合の冷媒加熱動作処理について説明する。
空気調和装置の待機時、つまり、タイマによる起動予約中において、冷媒寝込み判定手段12は、起動予定時刻よりも前の所定期間内の任意時刻から一定期間前までの外気もしくは圧縮機や室外熱交換器等の冷媒回路の温度変化、または、外気温度または室外熱交換器の温度と圧縮機の温度との温度差の推移履歴から、上述した所定期間内の任意時刻において冷媒寝込み状態であるか否かを判定する(ステップST301)。
冷媒寝込み状態でなければ(ステップST301;No)、起動予定時刻を越えたか否かを判定し(ステップST302)、起動予定時刻を越えた場合には(ステップST302;Yes)、空気調和装置は、通常動作モードに移行して(ステップST308)、処理を終了する。起動予定時刻を越えていない場合には(ステップST302;No)、ステップST301の処理に戻る。
冷媒寝込み状態であれば(ステップST301;Yes)、温度センサ17cにより12は、冷媒寝込み量の推定を行い、推定した冷媒寝込み量に基づいて、冷媒寝込み状態の解消に必要な冷媒加熱出力および冷媒加熱時間を算出する(ステップST303)。
続いて、冷媒寝込み判定手段12は、現在時刻に冷媒加熱時間を加算した時刻が起動予定時刻を越えたか否かを判定する(ステップST304)。現在時刻に冷媒加熱時間を加算した時刻が起動予定時刻を越えていない場合には(ステップST304;No)、ステップST301の処理に戻る。
現在時刻に冷媒加熱時間を加算した時刻が起動予定時刻を越えた時点で(ステップST304;Yes)、冷媒寝込み判定手段12は、冷媒加熱時間のカウントを開始すると共に、電圧位相指令値θ’および振幅指令値A’を生成して出力する。これにより、冷媒加熱動作が開始される(ステップST305)。
冷媒寝込み判定手段12は、電圧位相指令値θ’および振幅指令値A’の出力を開始してから、冷媒加熱時間が経過したか否かを判定する(ステップST306)。冷媒加熱時間が経過していなければ(ステップST306;No)、冷媒加熱時間が経過するまで電圧位相指令値θ’および振幅指令値A’を出力し続け、冷媒加熱時間が経過した時点で(ステップST306;Yes)、圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出したものと判定して、電圧位相指令値θ’および振幅指令値A’の出力を停止する。これにより、冷媒加熱動作が停止し(ステップST307)、空気調和装置は、通常動作モードに移行して(ステップST308)、処理を終了する。
つぎに、実施の形態2にかかる空気調和装置の冷媒加熱動作処理の一変形例について、図13を参照して説明する。図13は、実施の形態2にかかる空気調和装置の冷媒加熱動作処理の一変形例を示すフローチャートである。ここでは、実施の形態2にかかる空気調和装置の冷媒加熱動作処理の一変形例として、次回の起動時刻が予測可能である場合の冷媒加熱動作処理について説明する。
空気調和装置の起動時間を予測する場合には、例えば、週間カレンダーを用いて、平日もしくは休日の区分毎、または曜日毎に予測すればよい。また、実施の形態1にかかる空気調和装置を一般家庭に設置する場合には、起床時刻や帰宅時刻等を予測し、業務用として設置する場合には、始業時刻等を予測し、これらの時刻をそれぞれ起動予測時刻とすればよい。さらに、これらの起動予測時刻をユーザが単位時間刻み(例えば、分刻み、数分刻み、あるいは数十分刻み)で変更可能とし、オンタイマとして設定できるようにしてもよい。なお、この場合には、上述した図12のフローチャートにより冷媒加熱動作処理を実行すればよい。
また、例えば、年間カレンダーを用いて、月毎、あるいは季節毎に起動予測時刻を補正するようにしてもよい。さらに、日もしくは週単位で、天気予報の情報をインターネット等から取得し、各起動予測時刻の補正を行うようにしてもよい。また、起動予測時刻は、例えば数分、数十分といった幅を持たせてもよい。
空気調和装置の待機時において、冷媒寝込み判定手段12は、あらかじめ予測した起動予測時刻よりも前の所定期間内の任意時刻から一定期間前までの外気もしくは圧縮機や室外熱交換器等の冷媒回路の温度変化、または、外気温度または室外熱交換器の温度と圧縮機の温度との温度差の推移履歴から、上述した所定期間内の任意時刻において冷媒寝込み状態であるか否かを判定する(ステップST401)。
冷媒寝込み状態でなければ(ステップST401;No)、冷媒寝込み判定手段12は、運転動作指令の入力有無を判定し(ステップST402)、運転動作指令が入力されていなければ(ステップST402;No)、起動予測時刻を越えたか否かを判定する(ステップST403)。
起動予測時刻を越えた場合には(ステップST403;Yes)、ステップST401の処理に戻る。起動予測時刻を越えていない場合には(ステップST403;No)、ステップST402の処理に戻る。運転動作指令が入力されていれば(ステップST402;Yes)、空気調和装置は、通常動作モードに移行して(ステップST404)、処理を終了する。
冷媒寝込み状態であれば(ステップST401;Yes)、冷媒寝込み判定手段12は、冷媒寝込み量の推定を行い、推定した冷媒寝込み量に基づいて、冷媒寝込み状態の解消に必要な冷媒加熱出力および冷媒加熱時間を算出する(ステップST405)。
続いて、冷媒寝込み判定手段12は、現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えたか否かを判定する(ステップST406)。現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えていない場合には(ステップST406;No)、ステップST401の処理に戻る。
現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えた時点で(ステップST406;Yes)、冷媒寝込み判定手段12は、冷媒加熱時間のカウントを開始すると共に、電圧位相指令値θ’および振幅指令値A’を生成して出力する。これにより、冷媒加熱動作が開始される(ステップST407)。
冷媒寝込み判定手段12は、電圧位相指令値θ’および振幅指令値A’の出力を開始してから、冷媒加熱時間が経過したか否かを判定する(ステップST408)。冷媒加熱時間が経過していなければ(ステップST408;No)、冷媒加熱時間が経過するまで電圧位相指令値θ’および振幅指令値A’を出力し続け、冷媒加熱時間が経過した時点で(ステップST408;Yes)、圧縮機1内部に滞留した冷媒が加熱されて気化し、圧縮機1の外部へと漏出したものと判定して、電圧位相指令値θ’および振幅指令値A’の出力を停止する。これにより、冷媒加熱動作が停止する(ステップST409)。
続いて、冷媒寝込み判定手段12は、運転動作指令の入力有無を判定し(ステップST402)、運転動作指令が入力されていなければ(ステップST402;No)、起動予測時刻を越えたか否かを判定する(ステップST403)。
起動予測時刻を越えた場合には(ステップST403;Yes)、ステップST401の処理に戻る。起動予測時刻を越えていない場合には(ステップST403;No)、ステップST402の処理に戻る。運転動作指令が入力されていれば(ステップST402;Yes)、空気調和装置は、通常動作モードに移行して(ステップST404)、処理を終了する。
なお、上述した図12および図13に示すフローチャートでは、ステップST306およびステップST408において、算出した冷媒加熱時間が経過したか否かを判定して冷媒漏出判定を行うようにしたが、これに限らず、例えば、実施の形態1の図3に示す例において説明した外気の温度変化、あるいは、圧縮機1や室外熱交換器3等の冷媒回路100の温度変化を用いて、冷媒漏出判定を行うようにすることも可能であるし、また、例えば、実施の形態1の図4に示す例において説明した外気温度と圧縮機1の温度との温度差、あるいは、室外熱交換器3の温度と圧縮機1の温度との温度差を用いて、冷媒漏出判定を行うようにすることも可能である。また、圧縮機1からの冷媒漏出量を検出可能である場合には、冷媒漏出量を直接検出して冷媒漏出判定を行うようにすることも可能である。
なお、冷媒加熱動作時に投入できる電力は、モータ8の各相巻線インピーダンス等により最大値が決まる。また、電波法等の規定により冷媒加熱動作時に投入できる電力が制限される場合もある。例えば、周波数10kHz、出力50Wを超える加熱機器の場合、電波法百条による制約があるため、事前に50Wを超えないように電圧指令の振幅の調整や、流れる電流を検出して50W以下となるようにフィードバックすることで、電波法を遵守した圧縮機1の加熱が可能となる。
このような場合、上述したような冷媒加熱動作のために投入できる電力の上限制約により振幅指令値A’の上限が決まり、出力・加熱時間算出部45により算出した冷媒加熱時間が経過しても圧縮機1内に滞留した冷媒の漏出が完了しない場合がある。このため、振幅指令値A’ の上限が制約されることにより、出力・加熱時間算出部45により算出した冷媒加熱出力が得られない場合には、それに応じて冷媒加熱時間の延長を図る必要がある。この場合には、室内機の吹き出し温度が所定温度となるまでの時間を短縮することができなくなる。
そこで、例えば、出力・加熱時間算出部45に、冷媒加熱出力と、振幅指令値A’と、冷媒加熱時間との関係をあらかじめテーブル化するなどして保持しておき、振幅指令値A’の制約条件を超えないように、冷媒加熱出力および冷媒加熱時間を設定するようにすればよい。
また、冷媒加熱動作を実施するタイミングを、現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えた時点にするか、あるいは、起動予定時刻または起動予測時刻にするかを、双方の場合に消費する電力量を比較して決定するようにしてもよい。
この場合には、冷媒寝込み判定手段12は、現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えた時点で冷媒加熱動作を行った場合の消費電力量を推定すると共に、起動予定時刻または起動予測時刻における外気温度、あるいは、圧縮機1や室外熱交換器3等の冷媒回路100の温度を予測し、その予測値から、温度変化あるいは温度差の予測値を求め、その予測値に基づいて冷媒加熱時間および振幅指令値A’を求め、起動予定時刻または起動予測時刻において冷媒加熱動作を行った場合の消費電力量を推定する。
そして、現在時刻に冷媒加熱時間を加算した時刻が起動予測時刻を越えた時点で冷媒加熱動作を行った場合の消費電力量の推定値と、起動予定時刻または起動予測時刻において冷媒加熱動作を行った場合の消費電力量の推定値とを比較し、消費電力量の小さい方で冷媒加熱動作を実施すれば、圧縮機1内部への冷媒寝込み現象を解消するために要する消費電力量を抑えることができる。
また、冷媒加熱動作を実施するタイミングを、冷媒加熱時間の長さに応じて決定するようにしてもよい。
起動予定時刻または起動予測時刻において冷媒加熱動作を実施する場合には、起動予定時刻または起動予測時刻から室内機の吹き出し温度が所定温度となるまでの時間は、冷媒加熱時間、すなわち、起動時刻から圧縮機1が通常運転を開始するまでの時間と、圧縮機1が通常運転を開始してから実際に吹き出し温度が上昇し、所定温度になるまでの時間とを加算した時間となるため、冷媒加熱時間が長いほど、室内機の吹き出し温度が所定温度となるまでの時間が長くなる。したがって、冷媒加熱時間に上限閾値を設け、冷媒加熱時間が上限閾値以上となる場合には、起動予定時刻または起動予測時刻よりも冷媒加熱時間以上前の時刻に冷媒加熱動作を実施するようにすればよい。
さらには、冷媒加熱動作を実施するタイミングを決定する上記2つの手法を双方とも適用可能とすることも可能である。この場合には、消費電力量の抑制を優先するか、あるいは、室内機の吹き出し温度が所定温度となるまでの時間の短縮を優先するかを、ユーザが選択できるようにすればよい。
以上説明したように、実施の形態2の空気調和装置によれば、タイマ等によりあらかじめ起動時刻が設定され明確である場合に、設定した起動予定時刻よりも前の所定期間において起動判定を行い、所定期間内の任意時刻から一定期間前までの外気あるいは圧縮機1や室外熱交換器3等の冷媒回路100の温度変化の推移を記録すると共に、当該任意時刻までの冷媒寝込み継続期間に基づいて、圧縮機1内部への冷媒寝込み量の推定を行い、推定した冷媒寝込み量に基づいて、冷媒寝込み現象を解消するために要する冷媒加熱時間および冷媒加熱出力を算出すると共に、現在時刻から冷媒加熱時間が経過した時刻が起動予測時刻以上となった時点で、冷媒加熱動作を実施するようにしたので、タイマ等によりあらかじめ起動時刻が設定された場合でも、実施の形態1において説明した効果に加え、室内機の吹き出し温度が所定温度となるまでの時間を短縮することが可能となる。
また、次回の起動時刻が予測可能である場合に、予測した起動予測時刻よりも前の所定期間において起動判定を行い、所定期間内の任意時刻から一定期間前までの外気あるいは圧縮機1や室外熱交換器3等の冷媒回路100の温度変化の推移を記録すると共に、当該任意時刻までの冷媒寝込み継続期間に基づいて、圧縮機1内部への冷媒寝込み量の推定を行い、推定した冷媒寝込み量に基づいて、冷媒寝込み現象を解消するために要する冷媒加熱時間および冷媒加熱出力を算出すると共に、現在時刻から冷媒加熱時間が経過した時刻が起動予測時刻以上となった時点で、冷媒加熱動作を実施するようにしたので、次回の起動時刻が予測可能である場合でも、実施の形態1において説明した効果に加え、室内機の吹き出し温度が所定温度となるまでの時間を短縮することが可能となる。
また、起動予測時刻以降において運転動作指令が入力されない場合には、通常の待機状態に戻るようにしたので、無駄な電力の消費を抑制することができる。
なお、上述した実施の形態では、モータを駆動する回転トルクや不要振動が発生しない高周波数でインバータの各スイッチング素子を駆動するものとして説明したが、例えば、インバータの各スイッチング素子に与える交流電圧の周波数を約14kHz以上とすれば、モータの鉄心の振動音をほぼ可聴範囲外とすることができ、騒音の発生を抑制することができる。また、圧縮機のモータとして、磁石埋め込み型モータ(IPMモータ)を適用した場合には、高周波磁束が鎖交する回転子表面も発熱部となり、冷媒接触面増加や圧縮機構への速やかな加熱が実現されるため、効率の良い冷媒への加熱が可能となる。
また、上述した実施の形態にかかる空気調和装置では、圧縮機の圧縮機構として、スクロール型の圧縮機構を用いて好適である。スクロール型の圧縮機構では、圧縮室の高圧リリーフが困難であるため、圧縮機内部に冷媒が滞留している状態で圧縮機を起動すると、圧縮機構に過大なストレスが掛かることとなり好ましくない。実施の形態にかかる空気調和装置によれば、冷媒加熱動作の後に通常運転モードに移行するため、圧縮機構に過大なストレスを与えることなく起動することができる。
また、上述した実施の形態にかかる空気調和装置の構成は、図1に示す構成の位置変形例として、図14に示す構成としてもよい。図14は、図1に示す空気調和装置の一変形例を示す図である。
インバータ9がモータ8に印加できる電圧の最大値は、インバータ9に印加される直流母線電圧によって決定する。図14に示すように、空気調和装置内の直流電圧を昇圧コンバータ31により昇圧してインバータ9に供給する直流母線電圧Vdcを生成することにより、モータ8への印加電圧の最大値を大きくすることができ、図1に示す例よりも大きな電力をモータ8に供給することが可能となる。なお、図14に示した昇圧コンバータ31の内部構成は一例であり、空気調和装置内の直流電圧を昇圧してインバータ9に供給可能な構成であれば、他の構成であっても同様の効果が得られることはいうまでもない。
なお、圧縮機のモータとして、固定子のコイルエンドが小さく巻線抵抗の低い集中巻モータを適用した場合には、固定子巻線に生じる銅損による発熱量が少ない。銅損を大きくするためには、固定子巻線により大きな電流を流す必要があるが、この場合には、インバータに流れる電流も大きくなり、結果としてインバータ損失が過大となる。
上述した実施の形態にかかる空気調和装置によれば、高周波数の電圧を印加することにより、固定子巻線のインダクタンス成分が大きくなり、巻線インピーダンスが高くなるため、固定子巻線に流れる電流が小さくなり銅損は減るが、一方で、高周波数の電圧を印加することにより、鉄損が増大し効果的に冷媒に加熱することができる。さらに、固定子巻線に流れる電流が小さいため、インバータ損失も小さくなり、より効率良く冷媒への加熱を行うことが可能となる。
また、圧縮機のモータとして、集中巻モータを用いる場合、固定子巻線の巻き方は、モータの相端子側を巻き始めとし、中性点側を巻き終わりとすることが望ましい。図15は、実施の形態にかかる空気調和装置に適した集中巻モータの固定子巻線の巻き方の一例を示す図である。
図15(a)に示すように、集中巻モータの場合、磁極歯ごとにコイルを集中して巻線する。このとき、各相巻線の巻き始めの線はコイルの内部側に位置し、巻き終わりの線はコイルの表面側に位置することになる。一方、図15(b)に示すように、コイルの巻き終わりと圧縮機フレームとの間には、冷媒インピーダンスが存在する。したがって、コイルの巻き終わりを中性点側に接続した方が、相電圧に対する冷媒インピーダンスの影響が小さくなるため、安定した相電圧の供給が可能となり、さらに騒音や振動を低減することが出来る。
なお、以上の実施の形態に示した構成は、本発明の構成の一例であり、別の公知の技術と組み合わせることも可能であるし、本発明の要旨を逸脱しない範囲で、一部を省略する等、変更して構成することも可能であることは言うまでもない。