JP2013082013A - 自走装置の充電システム - Google Patents
自走装置の充電システム Download PDFInfo
- Publication number
- JP2013082013A JP2013082013A JP2011221584A JP2011221584A JP2013082013A JP 2013082013 A JP2013082013 A JP 2013082013A JP 2011221584 A JP2011221584 A JP 2011221584A JP 2011221584 A JP2011221584 A JP 2011221584A JP 2013082013 A JP2013082013 A JP 2013082013A
- Authority
- JP
- Japan
- Prior art keywords
- self
- power supply
- propelled device
- robot
- propelled
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Landscapes
- Manipulator (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
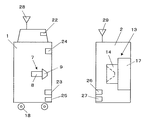
【解決手段】 ロボット側扉装置3と、ロボットの前面から進退自在とされたロボット側給電ユニット7と、ロボット側接触センサ25とを備えたロボット1を備えるとともに、給電側扉装置6と、給電側給電ユニット13と、給電側接触センサ27とを備えた給電装置2を備えており、ロボット側接触センサ25および給電側接触センサ27により、ロボット1が給電装置2に接触した状態を検出した場合にのみ、ロボット側扉装置3および給電側扉装置6を開放して、ロボット側給電ユニット7を給電側給電ユニット13に接続して給電を開始する。
【選択図】 図2
Description
前記自走装置は、前記給電装置に接触した際に開放される自走装置側扉装置と、前記自走装置側扉装置の解放時に前記自走装置の前面から進退自在とされた自走装置側給電ユニットと、前記自走装置が前記給電装置に接触したことを検出する自走装置側接触検出手段と、を備えており、
前記給電装置は、前記自走装置が接触した際に開放される給電側扉装置と、前記給電側扉装置の解放時に前記自走装置側給電ユニットが接続される給電側給電ユニットと、前記自走装置が前記給電装置に接触したことを検出する給電側接触検出手段と、を備えており、
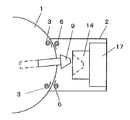
前記自走装置側接触検出手段および前記給電側接触検出手段により、前記自走装置が前記給電装置に接触した状態を検出した場合にのみ、前記自走装置側扉装置および前記給電側扉装置を開放して、前記自走装置側給電ユニットを前記給電側給電ユニットに接続して給電を開始するものであることを特徴とする。
前記自走装置が前記給電装置に接近した場合に、自走装置側通信部により、前記自走装置が前記給電装置に接近した旨を前記給電側通信部に通信することを特徴とする。
前記自走装置が前記給電装置に接近する際に、前記自走装置側障害物検出手段および前記給電側障害物検出手段により、前記自走装置と前記給電装置との間における人物の有無を検出しながら、前記自走装置が前記給電装置に接近することを特徴とする。
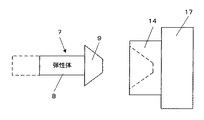
前記自走装置側端子部または前記給電側端子部には、前記自走装置側端子部と前記給電側端子部との接続時における位置ずれを吸収するための位置ずれ吸収機構が設けられていることを特徴とする。
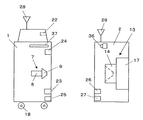
前記自走装置には、前記接触検知ボタンを押動動作させるための押動用棒が前記自走装置の前面から進退自在に設けられていることを特徴とする。
2 給電装置
3 ロボット側扉装置
4 ロボット側開閉駆動機構
5 給電側開閉駆動機構
6 給電側扉装置
7 ロボット側給電ユニット
8 端子駆動部材
9 ロボット側端子部
10,15 (+)側電極
11,16 (−)側電極
12 端子駆動機構
13 給電側給電ユニット
14 給電側端子部
17 端子支持部材
18 車輪
19 走行用モータ
20 位置センサ
21 メモリ
22 カメラ
23 ロボット側レーザセンサ
24 超音波センサ
25 ロボット側接触センサ
26 給電側レーザセンサ
27 給電側接触センサ
28 ロボット側アンテナ
29 給電側アンテナ
30 無線LANルータ
31 ロボット側制御部
32 バッテリ
33 ロボット側通信部
34 給電側制御部
35 給電側通信部
36 接触検知ボタン
37 押動用棒
38 押動駆動機構
39 扉ロック機構
40 給電側給電部
41 ロボット側給電部
Claims (8)
- 自走装置と、この自走装置のバッテリに給電するための少なくとも1つの給電装置とを備え、
前記自走装置は、前記給電装置に接触した際に開放される自走装置側扉装置と、前記自走装置側扉装置の解放時に前記自走装置の前面から進退自在とされた自走装置側給電ユニットと、前記自走装置が前記給電装置に接触したことを検出する自走装置側接触検出手段と、を備えており、
前記給電装置は、前記自走装置が接触した際に開放される給電側扉装置と、前記給電側扉装置の解放時に前記自走装置側給電ユニットが接続される給電側給電ユニットと、前記自走装置が前記給電装置に接触したことを検出する給電側接触検出手段と、を備えており、
前記自走装置側接触検出手段および前記給電側接触検出手段により、前記自走装置が前記給電装置に接触した状態を検出した場合にのみ、前記自走装置側扉装置および前記給電側扉装置を開放して、前記自走装置側給電ユニットを前記給電側給電ユニットに接続して給電を開始するものであることを特徴とする自走装置の充電システム。 - 前記自走装置は自走装置側通信部を備えており、前記給電装置は前記自走装置側通信部と通信可能な給電側通信部を備えており、
前記自走装置が前記給電装置に接近した場合に、自走装置側通信部により、前記自走装置が前記給電装置に接近した旨を前記給電側通信部に通信することを特徴とする請求項1に記載の自走装置の充電システム。 - 前記自走装置は、自走装置側障害物検出手段をさらに備えており、前記給電装置は、給電側障害物検出手段をさらに備えており、
前記自走装置が前記給電装置に接近する際に、前記自走装置側障害物検出手段および前記給電側障害物検出手段により、前記自走装置と前記給電装置との間における人物の有無を検出しながら、前記自走装置が前記給電装置に接近することを特徴とする請求項1または請求項2に記載の自走装置の充電システム。 - 前記自走装置側給電ユニットは、自走装置側端子部を備えており、前記給電側給電ユニットは、前記自走装置側端子部が接続される給電側端子部を備えており、
前記自走装置側端子部または前記給電側端子部には、前記自走装置側端子部と前記給電側端子部との接続時における位置ずれを吸収するための位置ずれ吸収機構が設けられていることを特徴とする請求項1から請求項3のいずれか一項に記載の自走装置の充電システム。 - 前記位置ずれ吸収機構は、前記自走装置側端子部を支持する端子駆動部材または前記給電側端子部を支持する端子支持部材の少なくとも一方を弾性体により形成して構成されていることを特徴とする請求項4に記載の自走装置の充電システム。
- 前記自走装置側接触検出手段は、接触センサであることを特徴とする請求項1から請求項5のいずれか一項に記載の自走装置の充電システム。
- 前記給電側接触検出手段は、接触センサであることを特徴とする請求項1から請求項6のいずれか一項に記載の自走装置の充電システム。
- 前記給電側接触検出手段は、接触検知ボタンであり、
前記自走装置には、前記接触検知ボタンを押動動作させるための押動用棒が前記自走装置の前面から進退自在に設けられていることを特徴とする請求項1から請求項6のいずれか一項に記載の自走装置の充電システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011221584A JP6087498B2 (ja) | 2011-10-06 | 2011-10-06 | 自走装置の充電システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011221584A JP6087498B2 (ja) | 2011-10-06 | 2011-10-06 | 自走装置の充電システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013082013A true JP2013082013A (ja) | 2013-05-09 |
| JP6087498B2 JP6087498B2 (ja) | 2017-03-01 |
Family
ID=48527772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011221584A Active JP6087498B2 (ja) | 2011-10-06 | 2011-10-06 | 自走装置の充電システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6087498B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104124730A (zh) * | 2014-05-14 | 2014-10-29 | 杭州菲沃机器人科技有限公司 | 智能割草机充电装置及其充电方法 |
| EP2923880A2 (en) | 2014-03-24 | 2015-09-30 | Toyota Jidosha Kabushiki Kaisha | Battery charger |
| JP2016163417A (ja) * | 2015-02-27 | 2016-09-05 | シャープ株式会社 | 充電装置および充電システム |
| JP2017147928A (ja) * | 2016-02-19 | 2017-08-24 | 音來多有限公司 | 充電システム及びそれを含む電子機器 |
| KR20180132779A (ko) * | 2016-04-01 | 2018-12-12 | 로커스 로보틱스 코포레이션 | 로봇용 충전 시스템 |
| CN109586378A (zh) * | 2019-01-24 | 2019-04-05 | 深圳市施罗德工业集团有限公司 | 管廊充电机构以及系统 |
| JP2021090312A (ja) * | 2019-12-05 | 2021-06-10 | オムロン株式会社 | 充電ユニット |
| CN112977112A (zh) * | 2019-12-13 | 2021-06-18 | 株式会社日立大厦系统 | 充电装置 |
| JP2021180002A (ja) * | 2015-09-04 | 2021-11-18 | ロブアート ゲーエムベーハーROBART GmbH | 自律移動ロボットと自律移動ロボットの基地局とを有するシステム、自律移動ロボットの基地局、自律移動ロボットのための方法、自律移動ロボットの基地局への自動ドッキング方法 |
| JP2022136425A (ja) * | 2021-03-08 | 2022-09-21 | オムロン株式会社 | 充電ユニット |
| WO2025100818A1 (ko) * | 2023-11-07 | 2025-05-15 | 삼성전자주식회사 | 로봇 암, 그 로봇 암을 포함하는 로봇 및 그 제어 방법 |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0464902U (ja) * | 1990-10-09 | 1992-06-04 | ||
| JPH0515073A (ja) * | 1991-06-28 | 1993-01-22 | Shinko Electric Co Ltd | 無人搬送車バツテリ−の自動充電用給電装置 |
| JPH05236603A (ja) * | 1991-03-01 | 1993-09-10 | Hitachi Kiden Kogyo Ltd | 無人搬送車の給電装置 |
| JPH0761242A (ja) * | 1993-08-25 | 1995-03-07 | Murata Mach Ltd | 充電装置 |
| JPH11282533A (ja) * | 1998-03-26 | 1999-10-15 | Sharp Corp | 移動ロボットシステム |
| JPH11327644A (ja) * | 1998-05-12 | 1999-11-26 | Matsushita Electric Ind Co Ltd | 無人搬送車の配車制御方法 |
| JP2000047728A (ja) * | 1998-07-28 | 2000-02-18 | Denso Corp | 移動ロボットシステムの充電制御装置 |
| JP2000139030A (ja) * | 1998-11-02 | 2000-05-16 | Yasumasa Akazawa | 車両用充電装置 |
| JP2000166276A (ja) * | 1998-11-26 | 2000-06-16 | Seiko Epson Corp | ロボットの制御装置 |
| JP2000224702A (ja) * | 1999-01-29 | 2000-08-11 | Sharp Corp | 自律移動作業車 |
| JP2001079792A (ja) * | 1999-09-09 | 2001-03-27 | Denso Corp | 移動ロボットの充電電極構造 |
| JP2003036116A (ja) * | 2001-07-25 | 2003-02-07 | Toshiba Tec Corp | 自律走行ロボット |
| JP2006113952A (ja) * | 2004-10-18 | 2006-04-27 | Funai Electric Co Ltd | 充電式走行システム |
| JP2007140795A (ja) * | 2005-11-16 | 2007-06-07 | Shinmei Ind Co Ltd | 無人搬送車の自動充電システム |
| US20100010672A1 (en) * | 2008-07-10 | 2010-01-14 | Yulun Wang | Docking system for a tele-presence robot |
| JP2010250474A (ja) * | 2009-04-14 | 2010-11-04 | Yaskawa Electric Corp | 移動ロボットシステム |
-
2011
- 2011-10-06 JP JP2011221584A patent/JP6087498B2/ja active Active
Patent Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0464902U (ja) * | 1990-10-09 | 1992-06-04 | ||
| JPH05236603A (ja) * | 1991-03-01 | 1993-09-10 | Hitachi Kiden Kogyo Ltd | 無人搬送車の給電装置 |
| JPH0515073A (ja) * | 1991-06-28 | 1993-01-22 | Shinko Electric Co Ltd | 無人搬送車バツテリ−の自動充電用給電装置 |
| JPH0761242A (ja) * | 1993-08-25 | 1995-03-07 | Murata Mach Ltd | 充電装置 |
| JPH11282533A (ja) * | 1998-03-26 | 1999-10-15 | Sharp Corp | 移動ロボットシステム |
| JPH11327644A (ja) * | 1998-05-12 | 1999-11-26 | Matsushita Electric Ind Co Ltd | 無人搬送車の配車制御方法 |
| JP2000047728A (ja) * | 1998-07-28 | 2000-02-18 | Denso Corp | 移動ロボットシステムの充電制御装置 |
| JP2000139030A (ja) * | 1998-11-02 | 2000-05-16 | Yasumasa Akazawa | 車両用充電装置 |
| JP2000166276A (ja) * | 1998-11-26 | 2000-06-16 | Seiko Epson Corp | ロボットの制御装置 |
| JP2000224702A (ja) * | 1999-01-29 | 2000-08-11 | Sharp Corp | 自律移動作業車 |
| JP2001079792A (ja) * | 1999-09-09 | 2001-03-27 | Denso Corp | 移動ロボットの充電電極構造 |
| JP2003036116A (ja) * | 2001-07-25 | 2003-02-07 | Toshiba Tec Corp | 自律走行ロボット |
| JP2006113952A (ja) * | 2004-10-18 | 2006-04-27 | Funai Electric Co Ltd | 充電式走行システム |
| JP2007140795A (ja) * | 2005-11-16 | 2007-06-07 | Shinmei Ind Co Ltd | 無人搬送車の自動充電システム |
| US20100010672A1 (en) * | 2008-07-10 | 2010-01-14 | Yulun Wang | Docking system for a tele-presence robot |
| JP2010250474A (ja) * | 2009-04-14 | 2010-11-04 | Yaskawa Electric Corp | 移動ロボットシステム |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2923880A2 (en) | 2014-03-24 | 2015-09-30 | Toyota Jidosha Kabushiki Kaisha | Battery charger |
| EP2923880A3 (en) * | 2014-03-24 | 2015-12-23 | Toyota Jidosha Kabushiki Kaisha | Battery charger |
| CN104124730A (zh) * | 2014-05-14 | 2014-10-29 | 杭州菲沃机器人科技有限公司 | 智能割草机充电装置及其充电方法 |
| JP2016163417A (ja) * | 2015-02-27 | 2016-09-05 | シャープ株式会社 | 充電装置および充電システム |
| JP2021180002A (ja) * | 2015-09-04 | 2021-11-18 | ロブアート ゲーエムベーハーROBART GmbH | 自律移動ロボットと自律移動ロボットの基地局とを有するシステム、自律移動ロボットの基地局、自律移動ロボットのための方法、自律移動ロボットの基地局への自動ドッキング方法 |
| JP2017147928A (ja) * | 2016-02-19 | 2017-08-24 | 音來多有限公司 | 充電システム及びそれを含む電子機器 |
| US10906419B2 (en) | 2016-04-01 | 2021-02-02 | Locus Robotics Corp. | Electrical charging system for a robot |
| JP2019511895A (ja) * | 2016-04-01 | 2019-04-25 | ローカス ロボティクス コーポレーションLocus Robotics Corp. | ロボットの充電システム |
| KR102223127B1 (ko) * | 2016-04-01 | 2021-03-04 | 로커스 로보틱스 코포레이션 | 로봇용 충전 시스템 |
| KR20180132779A (ko) * | 2016-04-01 | 2018-12-12 | 로커스 로보틱스 코포레이션 | 로봇용 충전 시스템 |
| CN109586378A (zh) * | 2019-01-24 | 2019-04-05 | 深圳市施罗德工业集团有限公司 | 管廊充电机构以及系统 |
| JP2021090312A (ja) * | 2019-12-05 | 2021-06-10 | オムロン株式会社 | 充電ユニット |
| JP7327131B2 (ja) | 2019-12-05 | 2023-08-16 | オムロン株式会社 | 充電ユニット |
| CN112977112A (zh) * | 2019-12-13 | 2021-06-18 | 株式会社日立大厦系统 | 充电装置 |
| JP2021097452A (ja) * | 2019-12-13 | 2021-06-24 | 株式会社日立ビルシステム | 充電装置 |
| JP2022136425A (ja) * | 2021-03-08 | 2022-09-21 | オムロン株式会社 | 充電ユニット |
| JP7631906B2 (ja) | 2021-03-08 | 2025-02-19 | オムロン株式会社 | 充電ユニット |
| WO2025100818A1 (ko) * | 2023-11-07 | 2025-05-15 | 삼성전자주식회사 | 로봇 암, 그 로봇 암을 포함하는 로봇 및 그 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6087498B2 (ja) | 2017-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6087498B2 (ja) | 自走装置の充電システム | |
| EP1457151B1 (en) | Automatic battery charging system and method of robot cleaner | |
| US9421874B2 (en) | Connecting apparatus for connecting an electrically powered vehicle to a charging station | |
| KR101146907B1 (ko) | 모바일 로봇을 위한 충전 시스템 | |
| EP2985853B1 (en) | Contactless electricity supply system | |
| US20190222043A1 (en) | Automatic Working System, Charging Station and Method for Returning Robotic Mower to Charging Station | |
| JP5491328B2 (ja) | プラグロック構造 | |
| CN112970412A (zh) | 充电站、智能割草机和自动工作系统 | |
| JP6560369B2 (ja) | 接触充電システム、給電装置、受電装置及び接触充電方法 | |
| CN105553033A (zh) | 充电桩和移动机器人 | |
| JP2017017905A (ja) | 充電システム、充電方法及び充電器 | |
| JP4645724B2 (ja) | 移動ロボットの外部電源接続装置 | |
| CN112072750A (zh) | 一种基于自动行走设备位置的对接充电系统及方法 | |
| JP2008043035A (ja) | 自走式ロボット | |
| US20250256592A1 (en) | Method and system for automatic electrical connection between two connectors | |
| CN109391014A (zh) | 一种移动机器人自主充电装置 | |
| JP2015042081A (ja) | 送電装置及び非接触式送電機器 | |
| CN112477650B (zh) | 充电桩及车辆充电系统 | |
| CN111937562B (zh) | 电极保护装置、用于自动行走设备的充电站及割草系统 | |
| CN212304843U (zh) | 对接充电触发装置、自动行走设备的充电站及割草系统 | |
| JP2008129696A (ja) | 移動ロボット、移動ロボット充電システム及び移動ロボット充電方法 | |
| WO2016147571A1 (ja) | 自動給電システム、自動給電装置および自律移動システム | |
| EP2981432A1 (en) | Connecting apparatus for connecting an electrically powered vehicle to a charging station | |
| CN118024923A (zh) | 一种电动汽车自动充电系统及方法 | |
| JP2008131697A (ja) | 移動ロボット充電システム及び移動ロボット充電方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140124 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141002 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160325 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161031 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20161207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6087498 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |