JP2013136331A - 自動二輪車 - Google Patents
自動二輪車 Download PDFInfo
- Publication number
- JP2013136331A JP2013136331A JP2011289001A JP2011289001A JP2013136331A JP 2013136331 A JP2013136331 A JP 2013136331A JP 2011289001 A JP2011289001 A JP 2011289001A JP 2011289001 A JP2011289001 A JP 2011289001A JP 2013136331 A JP2013136331 A JP 2013136331A
- Authority
- JP
- Japan
- Prior art keywords
- link
- motorcycle
- shock absorber
- rotation angle
- link mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Axle Suspensions And Sidecars For Cycles (AREA)
Abstract
【解決手段】自動二輪車は、前輪の車軸を支持するフロントフォーク13と、フロントフォーク13を支持するアンダーブラケット41と、を備え、フロントフォーク13は、車軸の両端部をそれぞれ支持する一対の緩衝器を備え、緩衝器はそれぞれ、互いに移動可能に接続される上部筒体47L、47Rおよび下部筒体49L、49Rを備え、アンダーブラケット41は、上部筒体47L、47Rを支持する。自動二輪車は、さらに、正面視で緩衝器同士の間に配置され、アンダーブラケット41と下部筒体49L、49Rとに接続されているリンク機構73、75と、リンク機構73、75の回転角を検出するロータリーポテンショメータ61と、を備えている。
【選択図】図5
Description
特許文献1は、後輪用の懸架機構の動きを検出する技術を開示している。具体的には、後輪を支持するスイングアームと、スイングアームの揺動に応じて伸縮する緩衝器と、緩衝器と並ぶように設けられるストロークセンサと、を備えている自動二輪車を開示している。ストロークセンサは、シリンダ部と、シリンダ部の内部を摺動するピストン部とを備えている。シリンダ部およびピストン部はそれぞれ、緩衝器の両端部に取り付けられている。緩衝器の伸縮に伴って、ピストン部はシリンダ部に対して直線的にスライド移動する。ストロークセンサは、シリンダ部に対するピストン部の位置に応じた信号を出力する。ストロークセンサの検出結果によれば、緩衝器の伸縮、または、スイングアームの揺動を好適に検出することできる。
すなわち、ストロークセンサの配置は、緩衝器に隣接した位置とする必要がある。また、ストロークセンサは緩衝器と略同等の長さを有している。このように、ストロークセンサの大きさ(サイズ)は、緩衝器と比べても小さくない。したがって、自動二輪車を外部から見たとき、ストロークセンサが目立ってしまい、自動二輪車の外観が損なわれるという不都合がある。
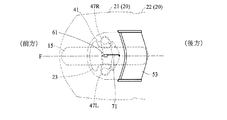
すなわち、本発明は、自動二輪車であって、前輪の車軸を支持するフロントフォークと、前記フロントフォークを支持するブラケットと、を備え、前記フロントフォークは、前記車軸の両端部をそれぞれ支持する一対の緩衝器を備え、前記緩衝器はそれぞれ、互いに移動可能に接続される上部筒体および下部筒体を備え、前記ブラケットは、前記上部筒体を支持し、前記自動二輪車は、さらに、正面視で前記緩衝器同士の間に配置され、前記ブラケットと前記下部筒体とに接続されているリンク機構と、前記リンク機構の回転角を検出する回転角検出部と、を備えている自動二輪車である。
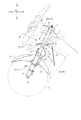
図1は、実施例1に係る自動二輪車の左側面図である。図2はフロントフォークおよびリンク機構を示す左側面図である。図3は、図2のb方向から見たフロントフォーク等を示す図である。図4は、図2のa方向から見たフロントフォーク等を示す図である。図1、2において、x方向は車体の前後方向であり、y方向は車体の車幅方向であり、z方向は車体の上下方向である。車体の前後方向x、車幅方向y、及び、上下方向zは互いに直交している。水平な路面Gに車体が直立している状態では車体の前後方向x、及び、車幅方向yはそれぞれ水平となり、車体の上下方向zは鉛直となる。なお、前後、左右、上下とは、自動二輪車1に乗車したライダーにとっての「前」、「後」、「左」、「右」、「上」、「下」を意味する。なお、図2では、説明の便宜上、カバー部材等を点線で示している。
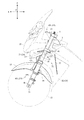
図5は、フロントフォークおよびリンク機構の斜視図である。ステアリングシャフト5の下端部には、アンダーブラケット41が固定されている。ステアリングシャフト5の上端部には、アッパーブラケット43が固定されている(図2参照)。アッパーブラケット43は、上述したハンドル11を支持する。アンダーブラケット41およびアッパーブラケット43の双方は、フロントフォーク13を支持する。アンダーブラケット41およびアッパーブラケット43は、本発明におけるブラケットに相当する。
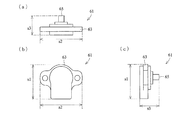
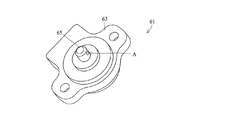
図6(a)は、ロータリーポテンショメータ61の平面図であり、(b)はロータリーポテンショメータ61の正面図であり、(c)はロータリーポテンショメータ61の側面図である。また、図7は、ロータリーポテンショメータ61の裏面を示す斜視図である。
図2および図5を参照する。自動二輪車1はさらに、リンク機構71を備えている。リンク機構71は、アンダーブラケット41とアウターチューブ49とに接続されている。
図10は、フロントフォークおよびリンク機構の動きを示す側面図であり、(a)は通常の状態を示し、(b)はアウターチューブ49が上向きに移動した状態を示す。
図11は、実施例2に係る後輪の懸架機構の左側面図である。図12は、図11のb方向から見たフロントフォーク等を示す図である。図13は、図11のa方向から見たフロントフォーク等を示す図である。フロントフォーク13は、一対の緩衝器45Rおよび緩衝器45Lを備えている。
3:車体フレーム
13:フロントフォーク
15:前輪
20:カバー部材
27:フロントフェンダー
41:アンダーブラケット(ブラケット)
43:アッパーブラケット(ブラケット)
45、45R、45L:緩衝器
47、47R、47L:上部筒体(インナーチューブ)
49、49R、49L:下部筒体(アウターチューブ)
81、81R、81L:上部筒体(アウターチューブ)
83、83R、83L:下部筒体(インナーチューブ)
51:車軸
53:ラジエータ
55、56:ボス部
61:ロータリーポテンショメータ
63:ケース
65:入力軸部
67:保持部材
71、91:リンク機構
73:第1リンク
75:第2リンク
93:第3リンク
95:第4リンク
79:ステー部材
79R、79L:脚部
79M:中央部
79A:軸受け部
A:貫通孔
B:車軸の軸心、車軸方向
C1:第1リンクと第2リンクとの連結軸
C2:第1リンクとロータリーポテンショメータとの連結軸
C3:第2リンクとステー部材との連結軸
C4:第3リンクと第4リンクとの連結軸
x:車体の前後方向
y:車体の車幅方向
z:車体の上下方向
Claims (15)
- 自動二輪車であって、
前輪の車軸を支持するフロントフォークと、
前記フロントフォークを支持するブラケットと、
を備え、
前記フロントフォークは、前記車軸の両端部をそれぞれ支持する一対の緩衝器を備え、
前記緩衝器はそれぞれ、互いに移動可能に接続される上部筒体および下部筒体を備え、
前記ブラケットは、前記上部筒体を支持し、
前記自動二輪車は、さらに、
正面視で前記緩衝器同士の間に配置され、前記ブラケットと前記下部筒体とに接続されているリンク機構と、
前記リンク機構の回転角を検出する回転角検出部と、
を備えている自動二輪車。 - 請求項1に記載の自動二輪車において、
前記回転角検出部は、正面視で前記緩衝器同士の間に配置されている自動二輪車。 - 請求項1または2に記載の自動二輪車において、
前記リンク機構は、前記車軸に対して略垂直な平面内で動く自動二輪車。 - 請求項1から3のいずれかに記載の自動二輪車において、
前記回転角検出部および前記リンク機構は、それぞれ前輪の上方に配置されている自動二輪車。 - 請求項1から4のいずれかに記載の自動二輪車において、
前記リンク機構の可動域は、側面視において、前記緩衝器と重なる範囲および前記緩衝器の後方の範囲の一方または双方の範囲内である自動二輪車。 - 請求項1から4のいずれかに記載の自動二輪車において、
前記リンク機構は、
前記ブラケットに回転自在に支持される第1リンクと、
前記第1リンクに回転自在に接続され、かつ、前記下部筒体に回転自在に支持される第2リンクと、
を備え、
前記回転角検出部は、前記ブラケットに対する前記第1リンクの回転角を検出する自動二輪車。 - 請求項6に記載の自動二輪車において、
前記第1リンクと前記第2リンクとの連結軸の位置は、前記緩衝器の後方である自動二輪車。 - 請求項6に記載の自動二輪車において、
前記第1リンクと前記第2リンクとの連結軸の位置は、前記緩衝器の前方である自動二輪車。 - 請求項6に記載の自動二輪車において、
前記リンク機構は、さらに、
前記ブラケットと前記第1リンクとの連結軸に回転自在に支持される第3リンクと、
前記第3リンクに回転自在に接続され、かつ、前記下部筒体と前記第2リンクとの連結軸に回転自在に支持される第4リンクと、
を備え、
前記第1リンクと前記第2リンクとの連結軸の位置は、前記緩衝器の後方であり、前記第3リンクと前記第4リンクとの連結軸の位置は、前記緩衝器の前方である自動二輪車。 - 請求項6から9のいずれかに記載の自動二輪車において、
前記第1リンクは、前記回転角検出部を介して前記ブラケットに支持されている自動二輪車。 - 請求項10に記載の自動二輪車において、
前記回転角検出部は、
ケースと、
前記ケースに対して回転可能な入力軸部と、
を備え、
前記ケースは前記ブラケットに固定され、
前記入力軸部は、前記第1リンクと一体に回転可能である自動二輪車。 - 請求項11に記載の自動二輪車において、
前記第1リンクは、前記入力軸部に固定されている自動二輪車。 - 請求項11または12に記載の自動二輪車において、
前記入力軸部は、前記車軸と略平行である自動二輪車。 - 請求項6から13のいずれかに記載の自動二輪車において、
前記下部筒体に支持され、前記第2リンクを回転自在に支持するステー部材を備える自動二輪車。 - 請求項14に記載の自動二輪車において、
前記ステー部材は、前記前輪を跨ぐように前記下部筒体の双方の間に架け渡されている自動二輪車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011289001A JP5812858B2 (ja) | 2011-12-28 | 2011-12-28 | 自動二輪車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011289001A JP5812858B2 (ja) | 2011-12-28 | 2011-12-28 | 自動二輪車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013136331A true JP2013136331A (ja) | 2013-07-11 |
| JP5812858B2 JP5812858B2 (ja) | 2015-11-17 |
Family
ID=48912467
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011289001A Active JP5812858B2 (ja) | 2011-12-28 | 2011-12-28 | 自動二輪車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5812858B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01195194A (ja) * | 1988-01-29 | 1989-08-07 | Honda Motor Co Ltd | 自動二輪のサスペンション装置 |
| JPH0241894U (ja) * | 1988-09-16 | 1990-03-22 | ||
| JP2000155479A (ja) * | 1998-11-18 | 2000-06-06 | Canon Inc | 画像形成装置 |
| US20080319698A1 (en) * | 2007-06-22 | 2008-12-25 | Yuan-Lin Chen | Intelligent vehicle load measuring system and method |
-
2011
- 2011-12-28 JP JP2011289001A patent/JP5812858B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01195194A (ja) * | 1988-01-29 | 1989-08-07 | Honda Motor Co Ltd | 自動二輪のサスペンション装置 |
| JPH0241894U (ja) * | 1988-09-16 | 1990-03-22 | ||
| JP2000155479A (ja) * | 1998-11-18 | 2000-06-06 | Canon Inc | 画像形成装置 |
| US20080319698A1 (en) * | 2007-06-22 | 2008-12-25 | Yuan-Lin Chen | Intelligent vehicle load measuring system and method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5812858B2 (ja) | 2015-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9452806B2 (en) | Vehicle | |
| US10994796B2 (en) | Leaning vehicle | |
| US9238494B2 (en) | Vehicle | |
| US9725130B2 (en) | Suspension device | |
| JP5514808B2 (ja) | サスペンション装置 | |
| US9475535B2 (en) | Vehicle | |
| US20150246704A1 (en) | Vehicle | |
| JP5707008B1 (ja) | 車両 | |
| WO2015002166A1 (ja) | 傾斜可能な車体フレームと2つの前輪を備えた車両 | |
| JPWO2015002167A1 (ja) | 傾斜可能な車体フレームと2つの前輪を備えた車両 | |
| CN104487332A (zh) | 车辆 | |
| JP2017065532A (ja) | 車両 | |
| JP2017065533A (ja) | 車両 | |
| US11230340B2 (en) | Leaning vehicle | |
| WO2018092587A1 (ja) | 車両用懸架装置 | |
| JP5812858B2 (ja) | 自動二輪車 | |
| JP2012111305A (ja) | サスペンション装置 | |
| JP6210852B2 (ja) | 鞍乗り型車両 | |
| JP2011513108A (ja) | 車両用ホイールサスペンション装置 | |
| JP6014326B2 (ja) | 自動二輪車 | |
| JP6239945B2 (ja) | 鞍乗り型車両 | |
| JP5197350B2 (ja) | ストローク量検知装置 | |
| JP4577259B2 (ja) | 緩衝器の取付構造 | |
| JP2018144652A (ja) | スタビライザリンク、スタビライザリンク装置、及びスタビライザ装置 | |
| JP2007099234A (ja) | ロール抑制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140507 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150915 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5812858 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |